人々に利益をもたらすために、ロボットは私たちのように歩く方法を学ぶ必要があります。

何十年もの間、ロボットは2本の足で歩くことができました。 今日、最先端のヒューマノイドロボットは、平らで傾斜した表面を歩き、階段を上り下りし、起伏の多い地形を進むことができます。 ジャンプする方法を知っている人もいます。 しかし、この進歩にもかかわらず、脚を備えたロボットは、器用さ、効率、信頼性の点で人や動物と比較することはできません。
既存の歩行ロボットはエネルギーを消費し、トレーニングに時間がかかりすぎます。 頻繁に、それらは失敗し、壊れます。 長い間夢見てきたロボットアシスタントになるには、これらの機械が私たちのやり方で歩くことを学ぶ必要があります。
私たちの世界は脚のために設計されているため、脚を持つロボットを作成する必要があります。 私たちはボトルネックを通過し、障害物を回避し、階段を上下します。 車輪やキャタピラに乗ったロボットが、体に適応した場所を動き回るのは困難です。
そして、多くのヒューマノイドロボットには、腰、膝、足首、足を備えた足があります。 しかし、そこから類似点は終わります。 たとえば、ロボットが地面を押す力と人間の力を比較すると、多くの場合それらは非常に異なることがわかります。 産業用ロボットアームの初期の例に由来するほとんどのヒューマノイドロボットは、あらかじめ決められた経路に沿って正確に移動するように手足を制御します。 ただし、2本の足で動かすには、強度制御ほどの位置制御は必要ありません。また、ロボット工学ではコンプライアンスとして知られる、柔軟性と弾力性の広い範囲を意味し、予期しない接触に対処できます。
多くの研究グループは、より動的で人間に似た方法で移動できる、剛性の低いロボットを作成しようとしています。 これらのプロジェクトの中で最も有名なのは、おそらく、 ボストン・ダイナミクスの アトラスでしょう。これは、硬い土壌と柔らかい土壌を走り、丸太を飛び越え、さらには裏返しさえすることができるヒューマノイドです。 しかし、繰り返しますが、最も複雑なロボットの動きを動物と比較すると、機械だけでは不十分であることがわかります。
何が欠けていますか? 技術は最大の問題ではありません。モーターは十分に強力で、材料は十分に強力で、コンピューターは十分に高速です。 制限は、明らかに、歩行がどのように機能するかを理解することです。
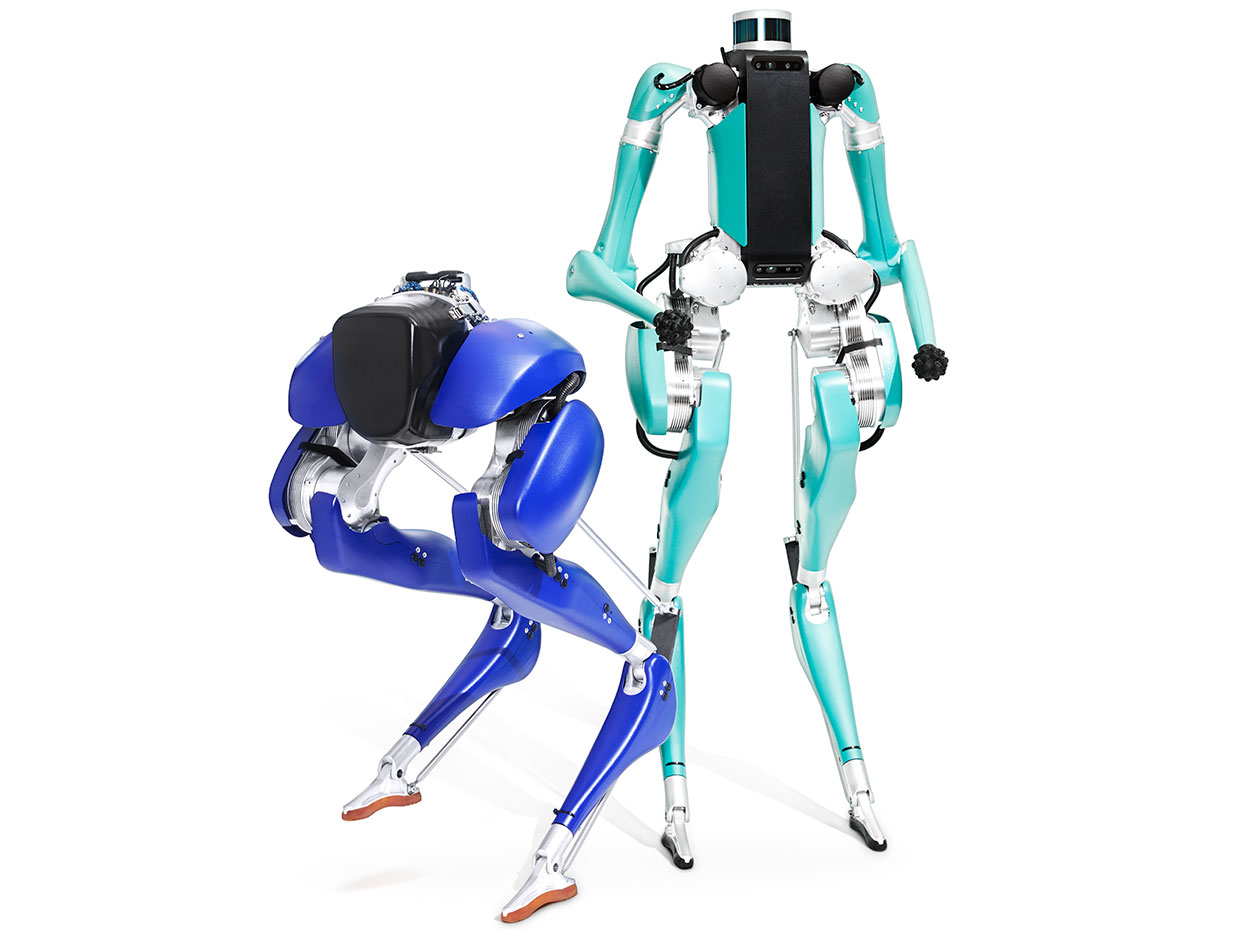
Cassie Robots(左)とAgility Roboticsの数字
オレゴン大学のダイナミックロボティクス研究所で、歩行の基本原理を理解し、これらの発見をロボットに適用しようとする研究者チームを率いました。 また、オレゴン州アルバニーにある新興企業であるAgility Roboticsの共同設立者兼テクノロジーディレクターでもあり、歩行ロボットの商用利用を研究しています。 2017年に、私たちはCassieに世界を開きました。これは、いくつかの研究チームに販売した2本足のプラットフォームです。 すぐに私たちの新しいロボットは世界に入ることができます:Digitの足はCassieの足に似ていますが、センサーと一対の手があり、安定させるために、そして将来的に操作のために使用します。
研究室と会社の両方で、私たちは、人がどこにでも行けるロボットの未来を創造することに取り組んでいます。 脚が動的なロボットは、いつかは自宅で高齢者の世話をしたり、火災や地震の際の救助活動に参加したり、自宅に荷物を届けたりできると信じています。 脚ロボットは、障害を持つ人々の機動性を高めるのに役立つ外骨格や人工装具の作成も可能にします。 彼らはついにSFロボットを実現します。
飛ぶよりも走りが良い鳥や、まったく飛ばない鳥もいます。 ダチョウ、七面鳥、ホロホロ鳥、ウズラは、鷹のように舞い上がることはできませんが、すぐに徒歩で移動できます。 実験室の同僚とロンドン大学の王立獣医大学のモニカ・デイリーは、実験室の周りを歩いたり走ったりしている鳥を何時間も見守っていました。 私たちは、これらの動物がいかに機敏かつ効率的に動くことができるかを理解したいと考えています-しかし、これらの羽の付いた機械のほとんどは種子で動作します!
ある実験では、ホロホロ鳥が小道に沿って走り、その後ナプキンを装った穴を踏みます。 動物は、脚の約半分の長さの穴に入ることを知りませんでしたが、つまずきませんでした。そして、脚は走りの溝に伸びて適応しました。 このプロセスでは、驚くべきことが起こります。鳥の脳はinりを感じたり反応したりする必要はありません。なぜなら、その足はそれ自体で対処するからです。
これは、ロボット開発者にとって重要なアイデアを提供します。最初にロボットを作成し、次にそれをアジャイルな動きのためにプログラムすることに決めた場合、成功しません。 ホロホロ鳥の場合と同様に、ロボットの器用さは、ロボットの受動的なダイナミクスと呼ばれる、身体の機械的特性にほとんど起因します。 また、ほとんどのプロジェクトでは、脚付きロボットを開発することは無視されています。 ソフトウェアと並行してロボットの受動的ダイナミクスを慎重に開発し、それらを統合システムに組み込むことにより、特性の観点からロボットが動物に近づく可能性が高まります。
動物からインスピレーションを得ていますが、鳥の足の形や人間の足の筋肉や骨の構造は再現していません。 私たちは、動物の動きの物理を理解し、それからコンピューターシミュレーションで理解し、検証し、実際のロボットで具現化できる抽象的な数学モデルを導き出したいと考えています。 ロボットを作成するとき、私たちは骨と脳の代わりに金属と電子機器を使用するため、同じ物理学を使用して、動物とは大きく異なる場合があります。
最も単純な数学的モデルの1つは、理想的なスプリング(脚)のペアに接続されたポイントマス(トランク)を記述します。 もちろん、このばね質量モデルは単純化されています。 それはダッシュから小さな男に似ており、足の関節の存在を考慮していないか、孤立した点で足が地面に触れていないこと。 それでも、スプリングマスモデルでは予期しない結果が生じる可能性があります。 シミュレーションでは、彼女は人間と動物が歩いて走るのに使用するほぼすべての歩行を再現できます。

最初のステップ:ATRIASロボットの脚は人間ではありませんが、人間のような歩行を示す最初のマシンでした
バネ-質量モデルをテストするために、2足ロボットATRIASを開発しました 。その名前は基本的な仮定の頭字語です: ロボットは球であると仮定する[ロボットは球であると想像してください]。 アイデアは、ロボットの受動的なダイナミクスにより、ばね脚を含むポイントマスモデルを可能な限り正確に再現できるということでした。
各脚は、4リンクの関節ジョイントとして知られる平行四辺形に組み立てられた軽い炭素繊維のロッドでできています。 このような構造により、脚の質量と慣性が最小限に抑えられ、システムがばね質量モデルにより近くなります。 脚の上部にグラスファイバースプリングを装備し、モデルの「スプリング」を物理的に実現し、地面との衝突を処理し、機械的エネルギーを蓄積しました。
当初、ATRIASはかろうじて立つことができたので、上部のひもでサポートしました。 しかし、体の速度と傾きを追跡するコントローラーを改善し、ロボットは最初の一歩を踏み出し、それから実験室を自由に歩き回りました。 その後、ATRIASは外乱から回復することを学びました-ある実験では、私の生徒は彼にボールを投げました。 また、ATRIASを大学のフットボール競技場に持ち込み、最大速度7.6 km / hに加速してから、すぐに停止しました。
ロボットが何をしていたかをよりよく理解するために、目隠しをされ、高床式で歩き、体がカーペットに包まれており、バランスを取るために手が使えないことを想像してください。 あなたはさらに先に進むことができます-それがATRIASがしたことです。 彼は障害物に対処することさえできました、例えば、途中でたくさんのfireで。
そして、器用さは重要な要素でしたが、エネルギーを節約することも非常に重要でした。 輸送コスト[COT]として知られるパラメーターを測定することにより、ロボットの費用対効果を確認しました。 これは、重量と速度の積に対するエネルギー消費(電力)の比率として定義され、動いている動物と機械のエネルギー効率を比較するために使用されます。 COTが低いほど優れています。 歩行者の場合、COTは0.2であり、通常のヒューマノイドロボットの場合、この数字ははるかに高くなります( 推定値 2〜3)。 私たちの実験では 、ATRIASの歩行モードでのCOTは1.13であり、動的ロボットの有効性が実証されました。 実際、ラジコンカーで使用されているようないくつかのリチウムポリマーバッテリーを搭載したATRIASは、約1時間動作します。
また、ロボットが地面を押す力も測定しました。 重量72.5 kg(平均的な人の大きさ)のATRIASをパワープラットフォームに置きます。このツールは、反力を測定することで人の歩行を測定するスポーツ医学でよく使用されます。 ロボットを歩くとき、力に関するデータを記録しました。 それから私の生徒の一人がATRIASの代わりになり、彼の歩みを記録しました。 サポートの反応の時間依存性をプロットすると、ロボットのスケジュールと正確に一致することがわかりました。 私たちが知る限り、これは今日のロボットの人間の歩行のダイナミクスの最も現実的な実装です。
その結果、単純な動的スプリングマスシステムをロボットに実装できることが確認されました。 効率性、信頼性、柔軟性など、多くの有用な特性を備えており、最下部に到達します。 次のロボットを作成します。
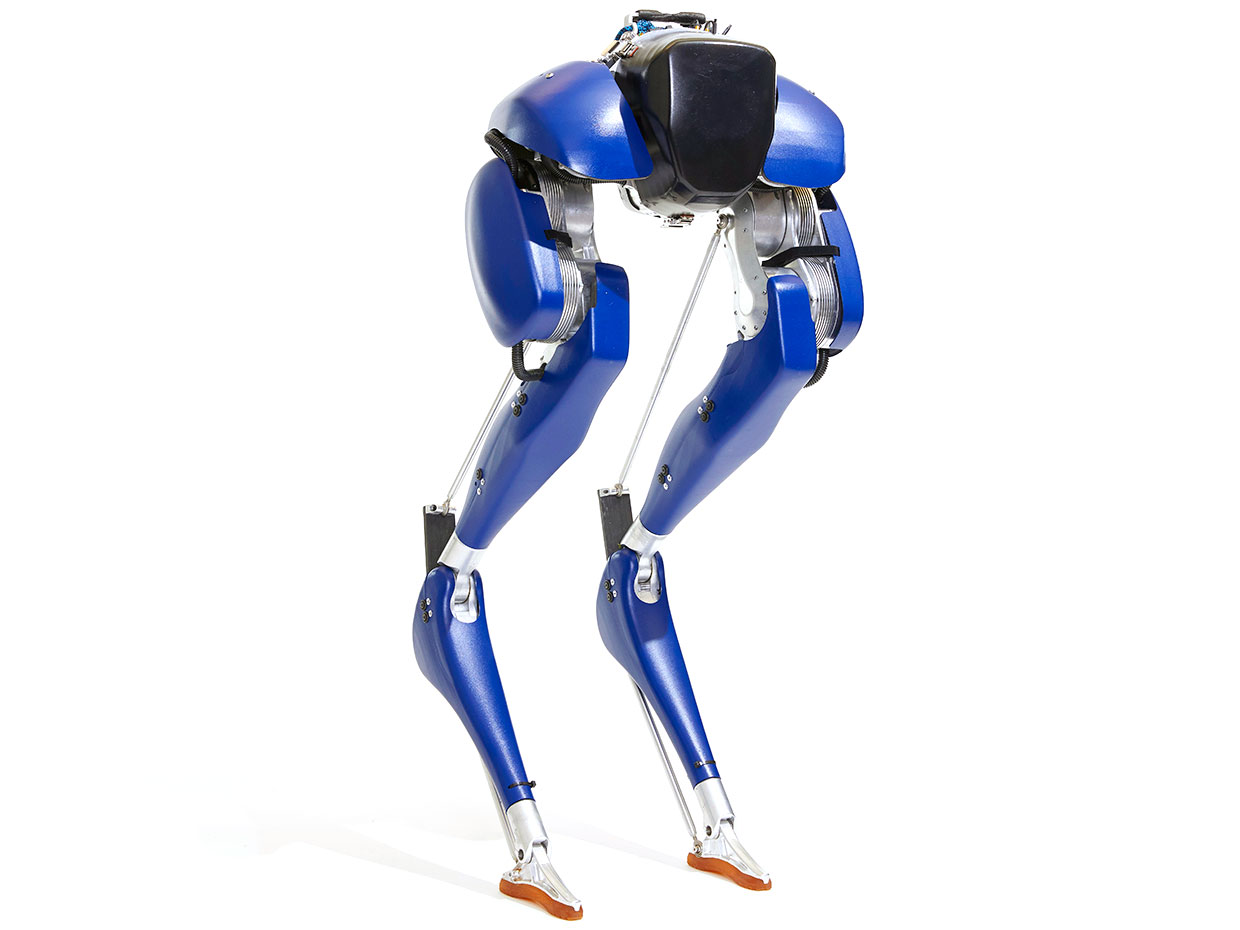
Cassieは、各脚に5つのモーターと2つのスプリングを使用して、困難な地形を動き回ります。
Cassieは、ATRIASと同様に、動的歩行ロボットです。 商業化に適した信頼性の高い有能なロボットを作成するために、設計のすべての側面を最適化しました。 そして、バーを高く設定しました。Cassieが森を駆け抜け、起伏の多い地形を歩き、サポート用のサスペンションなしでバッテリーで数時間働くことができるようにしたかったのです。
Cassieは、ATRIASで使用されたものと同じコンセプトに基づいて構築されていますが、私たちは彼女のブランドを新しくすることにしました。 以前は、2つのモーターを使用して、各脚の4つのリンクに電力を供給していました。 このようなスキームは質量を最小限に抑えますが、欠点もあります。歩行中に一方のモーターが他方を減速し、エネルギー損失につながりました。 Cassieでの作業中、この影響を排除するために他の脚の構成を検討しました 。 新しい回路はモーターをより小さくし、ロボットはATRIASよりさらに効率的になります。
Cassieの脚の構成はこの分析の結果であることに注意することが重要です。 足がダチョウや他の獣脚類の足に似ているという事実は、私たちが正しい道にいることを示しているかもしれませんが、羽で覆われた後、エミューの群れで迷子になる可能性のあるロボットを作成しようとしませんでした。
Cassieの各脚には5軸の動き(またはロボットのように話す自由度)があり、それぞれに独自のモーターがあります。 ヒップには、私たちのように3自由度があり、脚をあらゆる方向に回転させることができます。 他の2つのモーターには、膝と足に車軸があります。 キャシーは下肢と足首に自由度があります。 それらは受動的であり、モーターによって制御されませんが、バネに取り付けられているため、ロボットは平足のヒューマノイドの影響を受けずに困難な地形を移動できます。
Cassieの新しいレッグには、ATRIASよりも洗練された低レベルコントローラーの作成が必要でした。 ATRIASは脚を伸ばし、単純に両方のモーターから等しい強度と反対のトルクの方向を適用しました。 Cassieでは、特定の方向に脚を動かすには、モーターごとに異なるトルクを計算する必要があります。 これを行うには、コントローラーは脚の慣性とモーターとギアボックスのダイナミクスを考慮する必要があります。
コントローラーCassieは計画されたステップと動的なバランスを使用します
はい、コントローラーのタスクはより困難になりましたが、この方法により、より効率的に歩き、より広い範囲の動作を使用できます。 Cassieは、最初のコントローラーの1つを使用して、最大5 km / hの速度で歩くことができます。 消費電力は100ワット(持続)から300ワット(動作中)までさまざまで、リチウムイオンバッテリーでは5時間動作できます。 また、新しい脚により、カシアはATRIASができなかった方法で操縦できます。 そして、足関節のモーターのおかげで、ATRIASのように絶えず動く必要なしに、それは立つことができます。
Cassieの重量はわずか31 kgで、ATRIASの2分の1です。 2つのCassieは、車のトランクに1分未満で搭載できます。 また、より信頼性が高く、その部品はアルミニウムと炭素繊維で作られており、保護ケースは耐久性のあるプラスチックアクリルポリ塩化ビニルで作られており、衝突や落下から保護しています。
これまでのところ、キャシーは森の中を走る方法を知りません。 しかし、私たちは保険なしで彼女を外に連れて行き、彼女は地面、草、落ち葉の上を歩きました。 現在、ロボットの動的な挙動をモーションプランニングと統合する問題を研究しています。これにより、たとえば階段を登ることができます。 また、Cassieタイプのロボットをより便利にする別の機能に取り組んでいます:手。
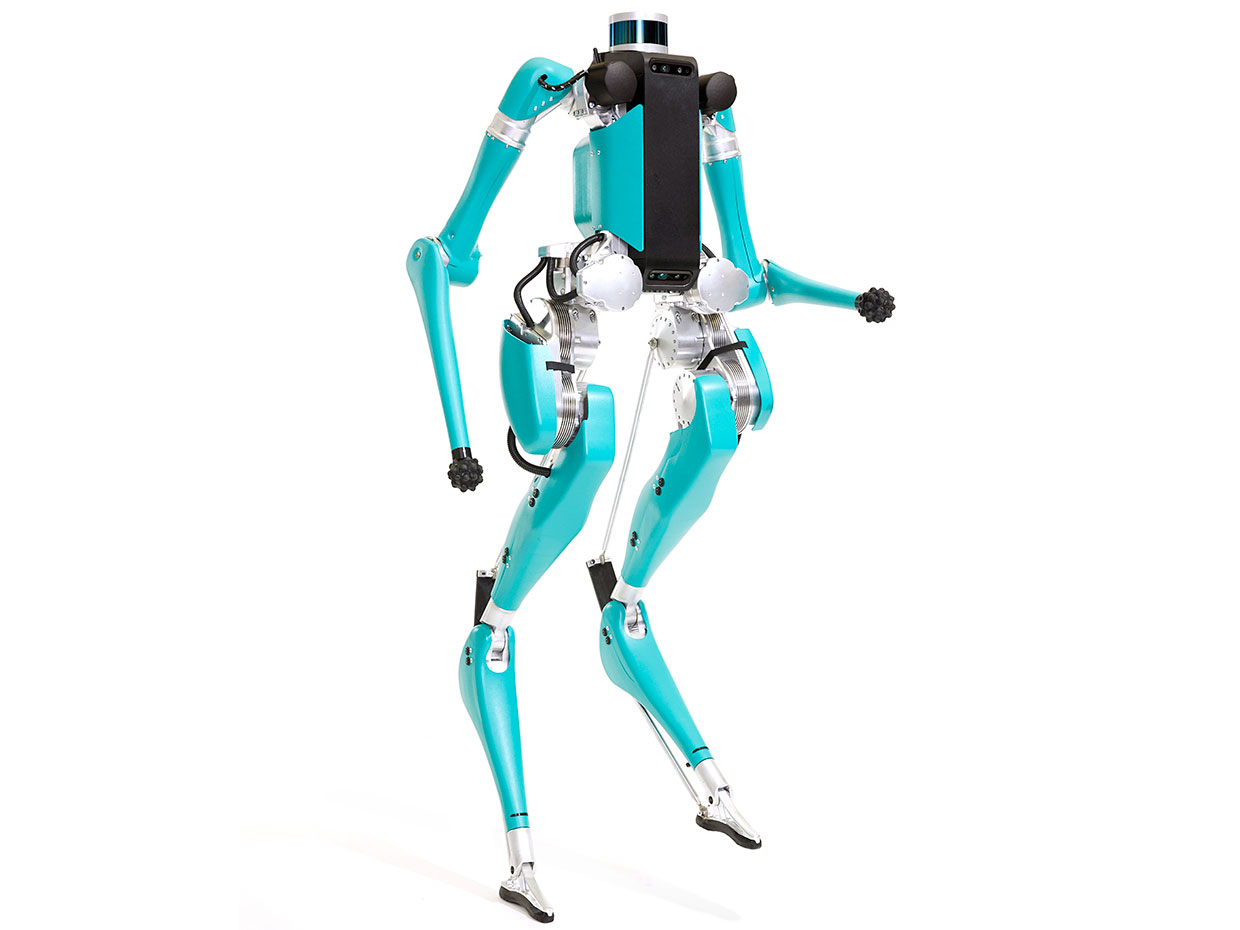
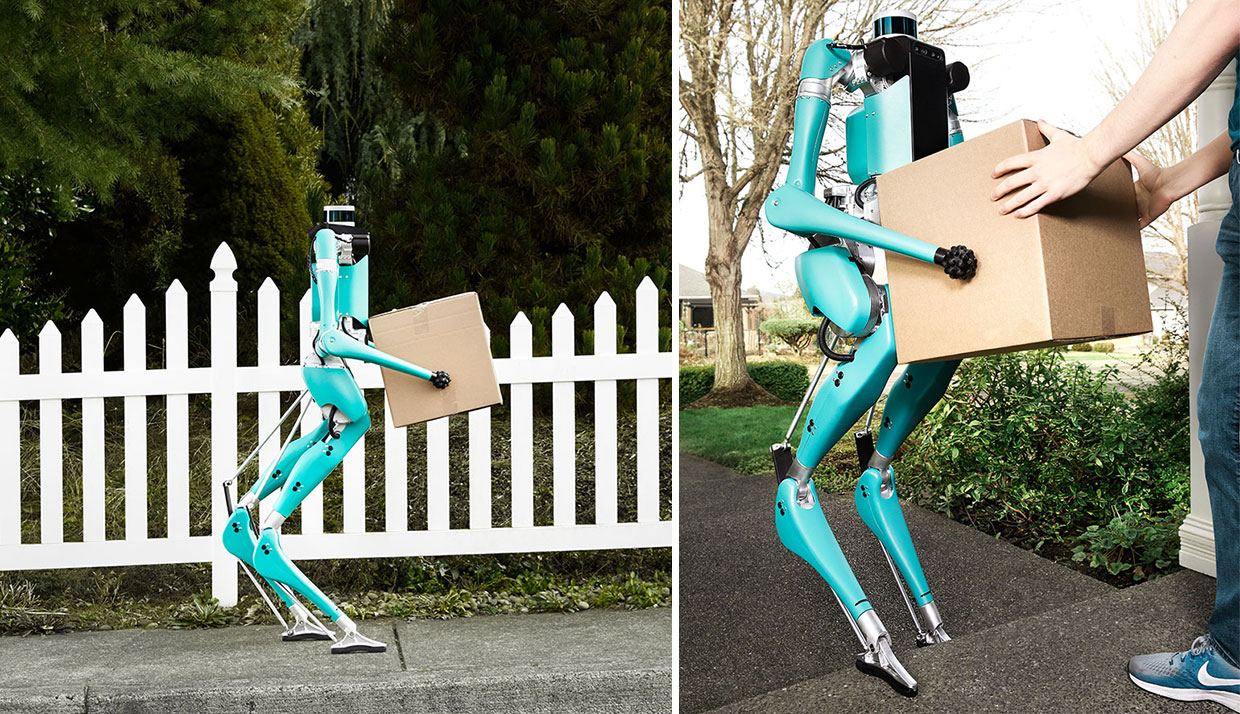
DigisにはCassieのような脚がありますが、内部にはセンサーを備えた胴体と、移動性とバランスを保つのに役立つ両足があります。
DigitはCassieの直接の子孫です。 彼は似たような足を持っていますが、センサーと内側のセンサーを備えた胴体を追加しました。 彼らは、特に彼が機動性とバランスを保つのを助け、歩行に合わせてスイングするように作られています。 彼らはまた、Digitが秋に自分自身をサポートし、立ち上がるために彼の体の向きを変えることを可能にします。
Digisには、Cassieにはない他の何か、組み込みの認識があります。 上体のLIDARを含む多くのセンサーを追加しました。 センサーは、データを収集するのに役立ちます。これにより、ロボットは障害物の多い世界、たとえば散らかった部屋や階段を移動でき、予期しない状況やセンサーエラーが発生した場合のみ安定したダイナミクスに依存します。
ディジット、および彼の後に来る脚付きロボットには、学ぶべきことがたくさんあります。 しかし、私たちは彼らが世界を変えると確信しています。 彼らの影響は、人々のライフスタイル、交通パターン、都市計画の変化という点で自動車と比較することができます。これらのロボットは、物流と荷物の配送を変えることを約束します。
近い将来、ロボモービルが登場すると、自動車メーカーやLyftやUberなどの共同旅行を提供する企業は、人を乗せた巨大な車を所有することになり、最大の交通量は今日と同様にラッシュアワーになります。 しかし、これらの車は夜遅く、日中に何をしますか? 彼らはアイドル状態ではないかもしれませんが、自動倉庫からあなたのドアに荷物を輸送します。 ただし、これらの車は歩道にしか到達できません。荷物を人なしでドアに届けることは非常に困難です。 そして、歩行ロボットが登場します。 彼らはそのような車に乗り、最後の数メートルを歩きます。 また、車輪と翼はこれらの役割の一部を果たすことができますが、二足歩行用に設計された世界では、他の移動プラットフォームは足のロボットほど柔軟ではありません。
デジットは異なる地形を歩いて階段を登ることを学び、いつの日か荷物を玄関に届けられるようにします
配送ロボットは、メーカーからの荷物がすぐにあなたのドアに配送される自動化された物流システムの一部になります。 このシステムは配達コストを削減するため、小荷物の配達は、人がアクセスできる大型の明るく暖房された倉庫で購入するよりも安くなります。 小さな卸売店は不要になります。 もちろん、人々は買い物を楽しむことができます。 しかし、毎日の製品はロボットによって配送されるため、時間とお金を節約できます。
二足歩行ロボットは、家庭やオフィスに侵入することができます。 彼らは二階や混雑した部屋を歩き、安全な目の高さで、人間の規模で人々と交流することができます。 彼らは物を運ぶのを助け、リモートプレゼンスのデバイスとして機能します。これにより、家族や友人がロボットを使用して、人とリモートで通信し、会社を維持することができます。
足の上のロボットは、人々が危険な場所に到達することができます。 彼らは、リアルタイムのデータを収集するために山火事にパラシュートし、住民を探して燃えている建物にぶつかり、福島原発などの被災地に入り、到達困難な地域を探索します。 彼らは定期的に水力発電所と廃坑の内部を検査するので、私たちはその必要がありません。
この未来に入るためには、多くの問題を解決する必要があります。 しかし、私はロボット工学コミュニティがこの技術を実用的にできると確信しています。 これはロボットにとっての小さな一歩であり、すべての人類にとって大きな飛躍となります。