ロボットを作るという幼少期の夢を追いかけて、1年前の情報を探してcyber-place.ruフォーラムにアクセスしました(広告にカウントしないでください)。 夢中になって、私は自分のテレプレゼンスロボットを作成することを考えていました。電話やコンピューターを介したリモートコントロールで、空間、ビデオ、および双方向の音声通信で動くことができます。 Cyberwrtファームウェアを備えたtplink 3020ルーターに基づいたモデルに触発されました。 トピックに関する知識の欠如と教育の大きなギャップは、試行錯誤と焼けた電子機器の結果として、結果を達成したいという私のman望を妨げませんでした。
「私の過ちから学ぶ」ほぼ1年後、最初の結果、サイバーボット-3に基づいてインターネット経由で制御できるマシンが登場しました。開発者のおかげで、彼らは本当に素晴らしい仕事をしました。 (私にとっては、ソフトウェアのプログラミングと作成は単なるスペースです!)多くの人々がタイプライターを行いました。機器と詳細な指示はインターネットの広大な領域にあります。 したがって、これについて詳しく説明する理由はありません。

さらに、デバイスの自律性が必要になり、(即興の手段から)「充電ステーション」を構築し、ロボットの前にバネ式接点を固定しました。 ロボットの主電源は、5V電源から充電できるように4.2Vに選択されています。 充電電流を増やすために、2つのTP4056モジュールが並列にはんだ付けされました。 電話を介して、ブラウザを介してインターネット経由でこの経済をすべて管理しました。


私が決めたモデルで十分に遊んだので、先に進む必要があります。 残念ながら、1つ、つまりメインコントローラーに基づいてデバイスを管理する方法は見つかりませんでした(すべてがまだ先だと思います)。
この機器は双方向の音声通信を許可していないため、DS-2CD2432F-IW CCTVカメラを使用するより良い方法を見つけることができませんでした。 当初は、カメラのエンジニアリングコネクタに接続してuartを読み取り、標準のカメラソフトウェアを使用してロボットカートの動きを制御するという(クレイジーな)アイデアがありました。 PTZカメラを使用して移動します。 回転式ではないカメラで左、右、下、上に押したときにどのチームがuartに横たわっているかを検討し、これらのコマンドをモーターを制御するはずのuart arduino nanoに駆動することを考えました。ソフトウェア。 アイデアは成功しませんでした。製造元はこれらのコマンドをブロックしました。ただし、uartでPTZボタンをクリックすると「ptzはサポートされていません」というメッセージが表示されました。
したがって、テレプレゼンスロボットではなく「車輪付きカメラ」が私の努力の結果でした。
携帯電話からデバイスを制御するには、Androidでいくつかのアプリケーション、いわゆる「フローティングウィンドウ」を開く機能を使用します(以降のバージョンでは、フローティングアプリなどのサードパーティアプリケーションなしで動作します)。 カメラインターフェイスにアクセスするためのtinyCam PROとカートコントロールにアクセスするためのブラウザーの2つのアプリケーションを開く必要があります。
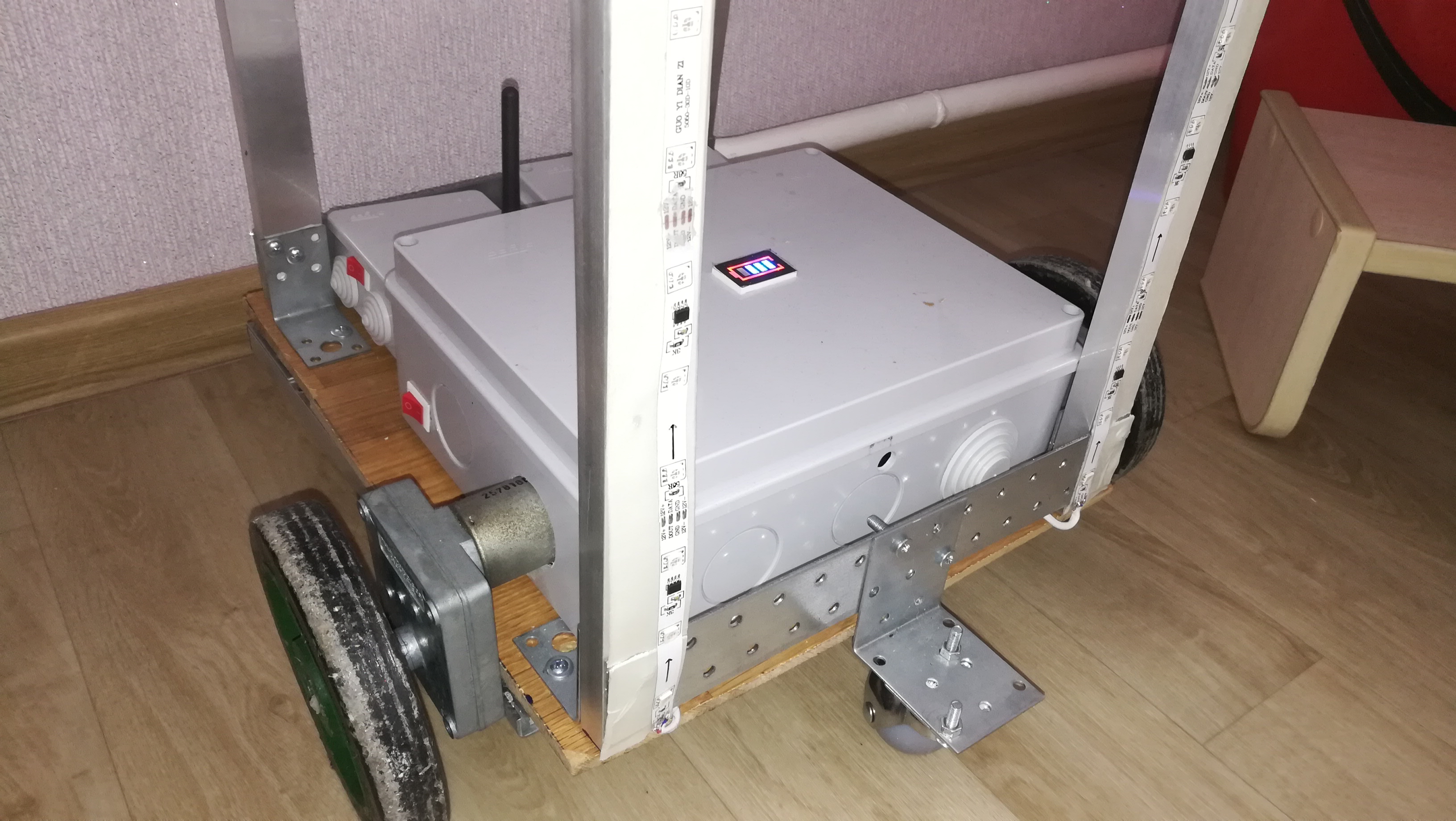
その結果、CyberWRTファームウェア、はんだ付けアンテナ、私の場合は+ 10dBのtpリンク3020機器をホストするためのボックスとしての電気接続箱、ルーターのWebインターフェースからuartコマンドを受信するarduino nano、強力なモーターギアボックスを制御するためのモンスターモーターシールド古いスロットマシン。

ロボットの高さは165cm、重量は約10kg、電力は12.6V(リチウムアセンブリ18650 +バランサー付き充電コントローラー)、カメラが隠されているヘッドの代わりにマヨネーズの缶、カメラのフルタイムスピーカーが5ワットスピーカーに置き換えられ、聞き取りやすくなりました。 目-ライトの下からリフレクターに挿入された2つのLED、目はサイバーボットインターフェイス、2つのアドレス指定可能なLEDストリップ、およびそれらを制御するためのarduinoアドオンミニコントローラーから制御されます(Alex Guyverのプロジェクト「火ランプ」が破れました)。
テープは、コマンドでリレーモジュールを介して、またサイバーボットインターフェイスを介して制御されます。
ぎこちない外観は、ロボットが3月8日に同僚をドレスアップして祝福したという事実によるものです。 (ロボットは人里離れた場所から私がコントロールするターミネーターから音楽に乗って、軽い音楽とLEDのスムーズな組み込みに混乱し、聴衆は大喜びしました)。


将来的には、マニピュレーターで作業をマスターし、すべての「不要な」ものを削除し、祖母でさえ「デザイン」を管理できるように、必要な機器(ルーターとArduinoをESP32に置き換えます)とソフトウェアを選択します:)長い投稿を遅らせないように、もしあなたがそのトピックを気に入ったら、あなたの批判とアドバイスを楽しみにしています。