
専門化
ロボティクス研究所はITMO大学の最も古い部門に属し、「制御システムとコンピューターサイエンス」と呼ばれています。 彼女は1945年に登場しました。 研究所自体は1955年に設立され、その後、測定の自動化と水上艦のパラメーターの計算の問題に対処しました。 その後、方向の範囲が拡大されました。サイバネティックス、CAD、およびロボット工学が追加されました。
今日、研究所は産業用ロボットの改善に取り組んでいます。 従業員は、人間と機械の相互作用に関連する問題を解決します。ロボットの強度を制御する安全な制御アルゴリズムを開発し、人と並んでタスクを実行できる協調ロボットにも取り組みます。
また、ロボットグループのリモート制御のための代替方法を開発し、新しいタスクをオンラインで実行するように再構成できるソフトウェアアルゴリズムを作成します。
プロジェクト
多くの実験用ロボットシステムが大企業から取得されており、研究または産業用を目的としています。 機器の一部は、研究開発の一環として従業員によって作成されました。
後者のうち、2自由度のスチュアートロボットプラットフォームを区別できます。 アカデミックインスタレーションは、制御アルゴリズムをテストして、ボールをサイトの中心に保つように設計されています( このビデオでシステムの動作を見ることができます)。
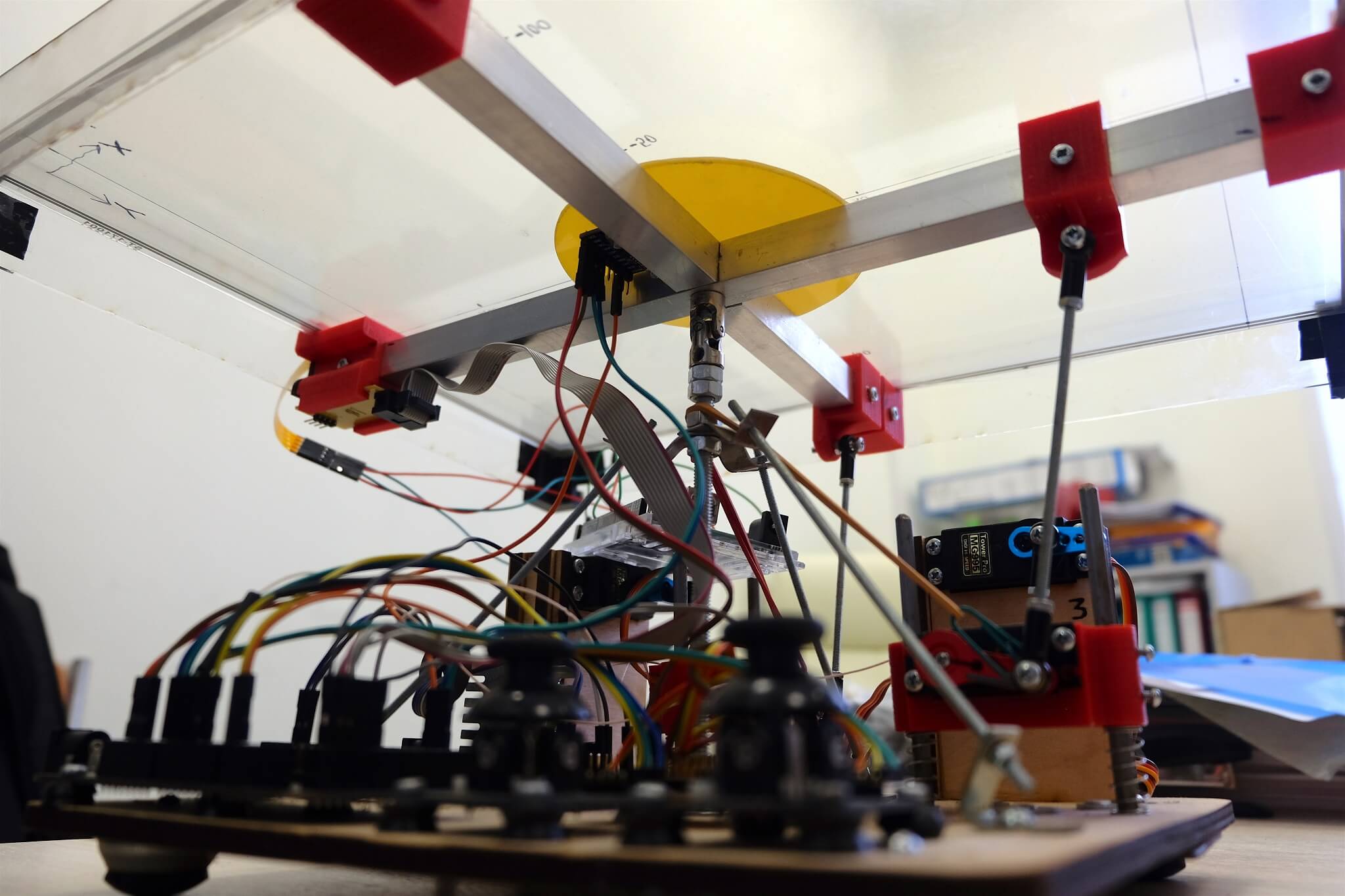
ロボット複合体は、ボールの座標を決定する抵抗センサー基板を備えた長方形のプラットフォームで構成されています。 ドライブシャフトは、スイベルジョイントを使用して取り付けられます。 これらのドライブは、USB経由でコンピューターから受信した制御信号に応じてプラットフォームの角度を変更し、ボールが転がらないようにします。
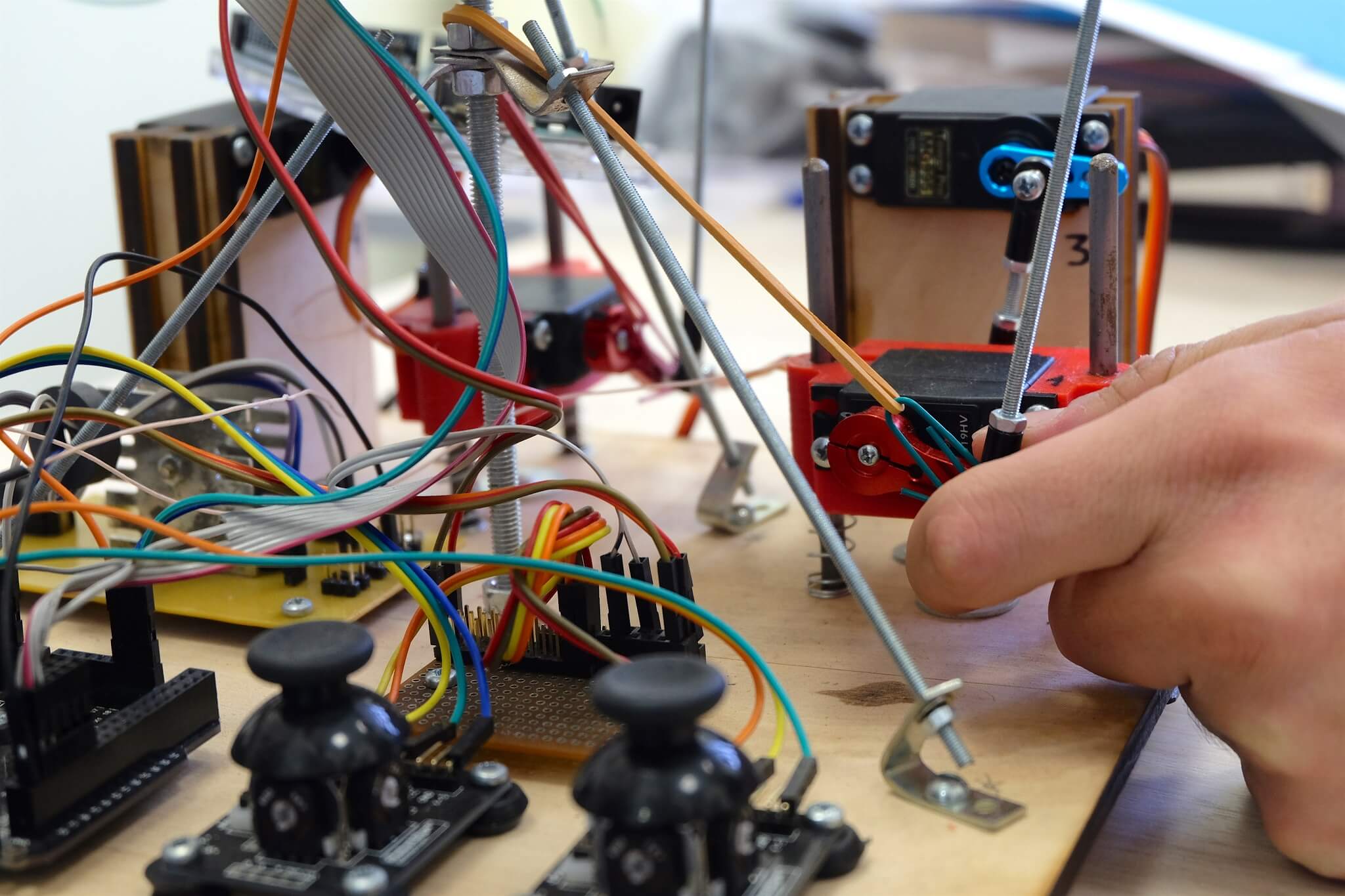
複合体には、外乱を補正する追加のサーボがあります。 これらのドライブの操作のために、実験室のスタッフは、振動や風などのさまざまな種類の干渉を「滑らかにする」特別なアルゴリズムを開発しました。
さらに、実験室のロボットパークには、 KUKA youBot研究施設があります。これは、全方向車輪を備えたモバイルプラットフォームに取り付けられた5リンクのロボットアームです。

KUKA youBotロボットは、移動するターゲットを追跡するための適応制御アルゴリズムをテストしました。 彼らは、デジタルカメラとビデオ処理手順に基づいたビジョンシステムを使用しています。 このプロジェクトの基礎は、実験室のスタッフが実施する非線形システムの適応制御の分野の研究です。
制御アルゴリズムは、ロボットのリンクに作用する外部の影響を補正するために使用されます。 その結果、機械は作業ツールを空間内の固定点に保持し、所定の経路に沿って安定して動かすことができます。
KUKA youBotロボットに基づいて実装されたプロジェクトの例は、センサーレスの力の瞬間の感覚です。 英国の企業TRA Roboticsと共同で、高価なトルクセンサーなしで作業ツールと環境の間の相互作用の力を評価できるアルゴリズムを開発しました。 これにより、ロボットは外部システムに頼ることなく、より複雑な操作を実行できました。

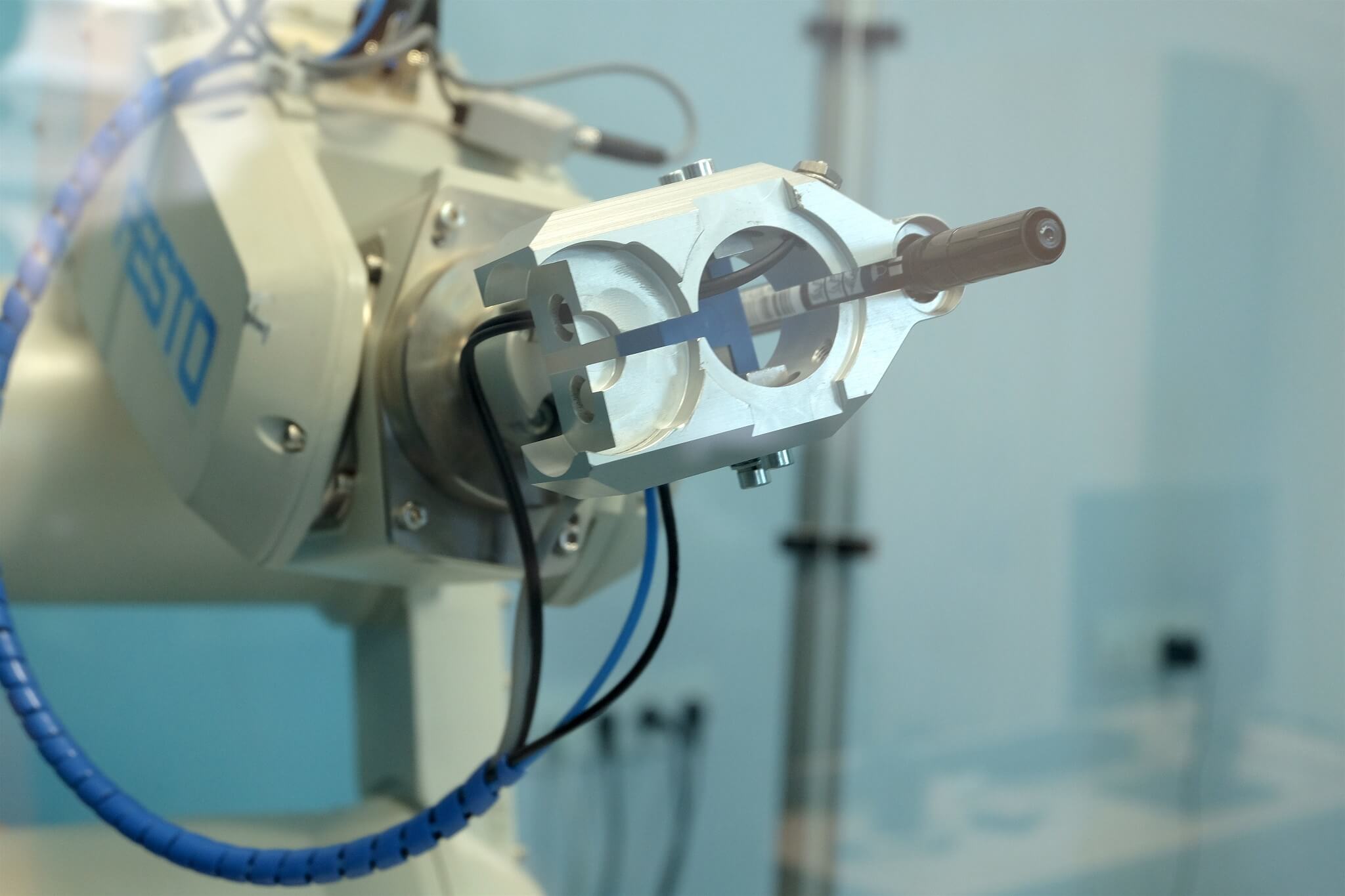
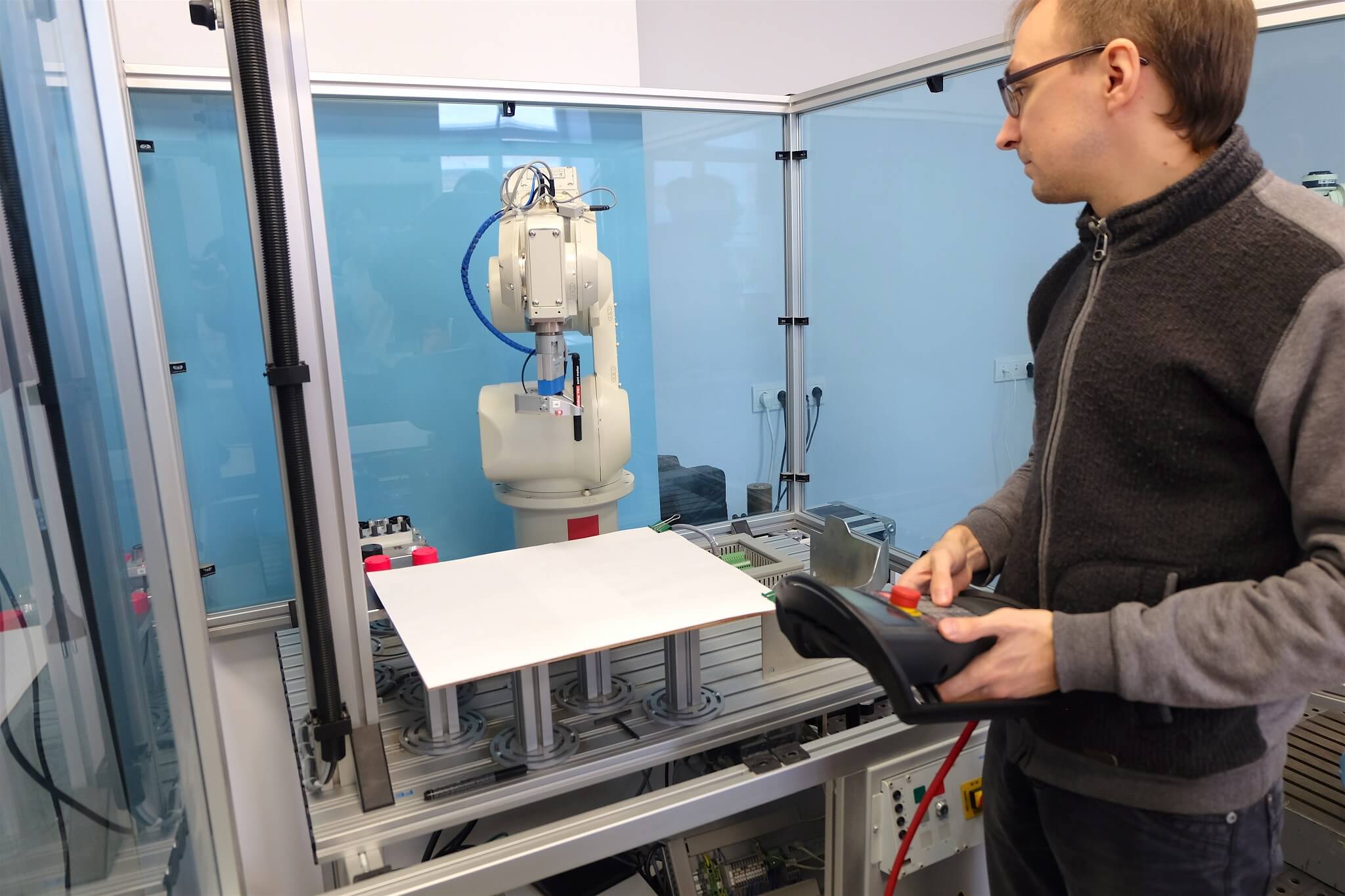
実験室にロボットを設置するもう1つの例は、 FESTO Robot Vision Cellです。 この複合体は、溶接などの生産における技術的操作をシミュレートするために使用されます。 このシナリオを実装するために、モーションプランニングのタスクが提示されます。シミュレーション溶接ツールは、金属部品の輪郭をバイパスします。
さらに、セルにはビジョンシステムが装備されており、色や形状で部品を並べ替えるタスクを解決できます。
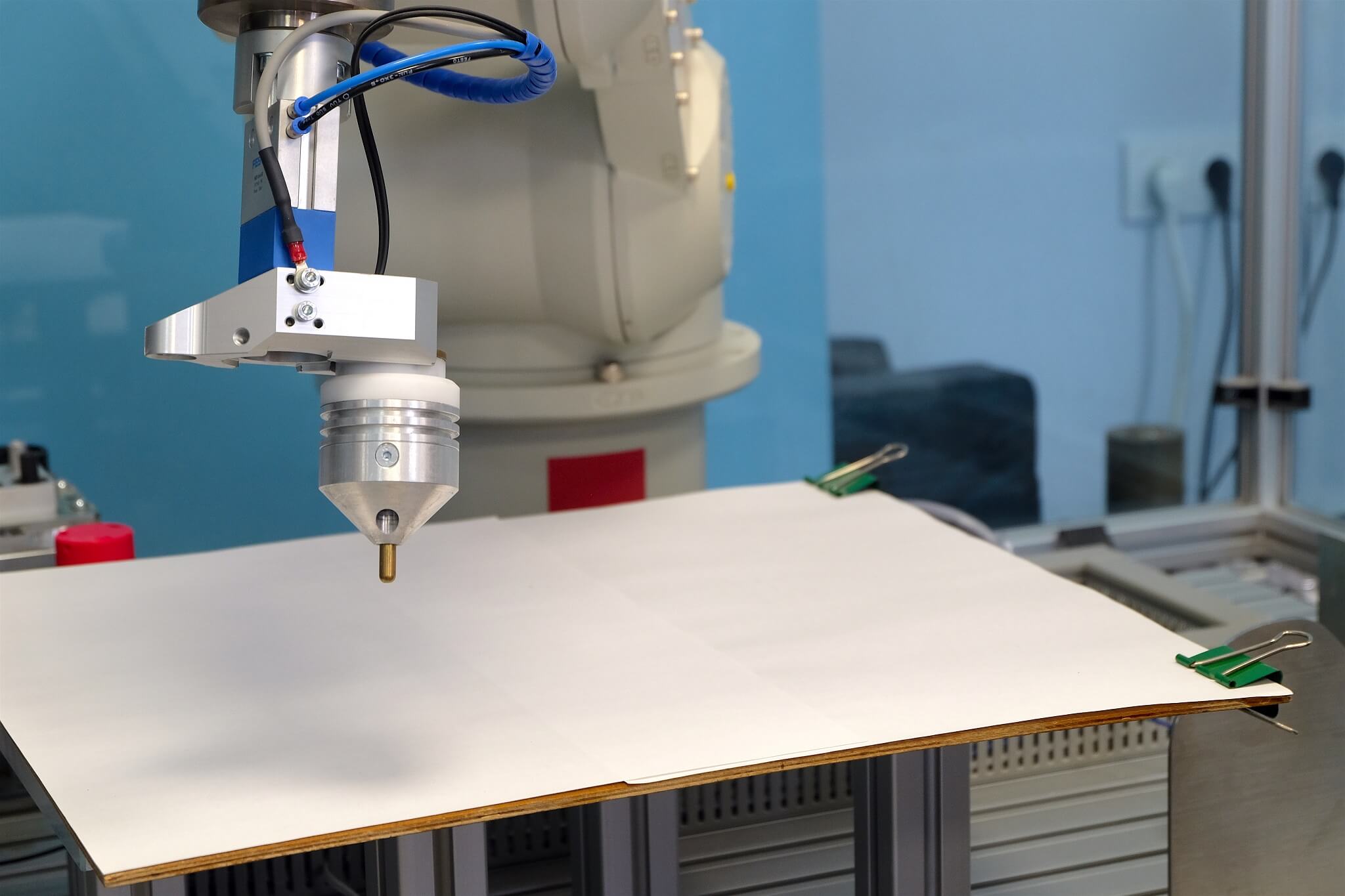
このプロジェクトは、三菱RV-3SDB産業用ロボットを備えたFESTO Robot Vision Cellロボットセルに基づいており、移動計画のタスクを解決します。
複雑なパスをプログラミングする際に、オペレータがロボットコントローラと対話するプロセスを簡素化します。 この考え方は、ビットマップに示された輪郭を使用して、ロボットツールの動きを自動的にプログラムすることです。 ファイルをシステムにアップロードするだけで十分です。アルゴリズムは必要な参照ポイントを個別に配置し、プログラムコードをコンパイルします。
実際には、結果のソリューションを彫刻や描画に適用できます。
私たちの「ロボットアーティスト」がA. S.プーシキンの肖像を描いたチャンネルにビデオがあります。 また、この技術は複雑な形状の部品の溶接にも使用できます。 実際、それは実験室の条件における産業上の問題を解決するロボット複合体です。
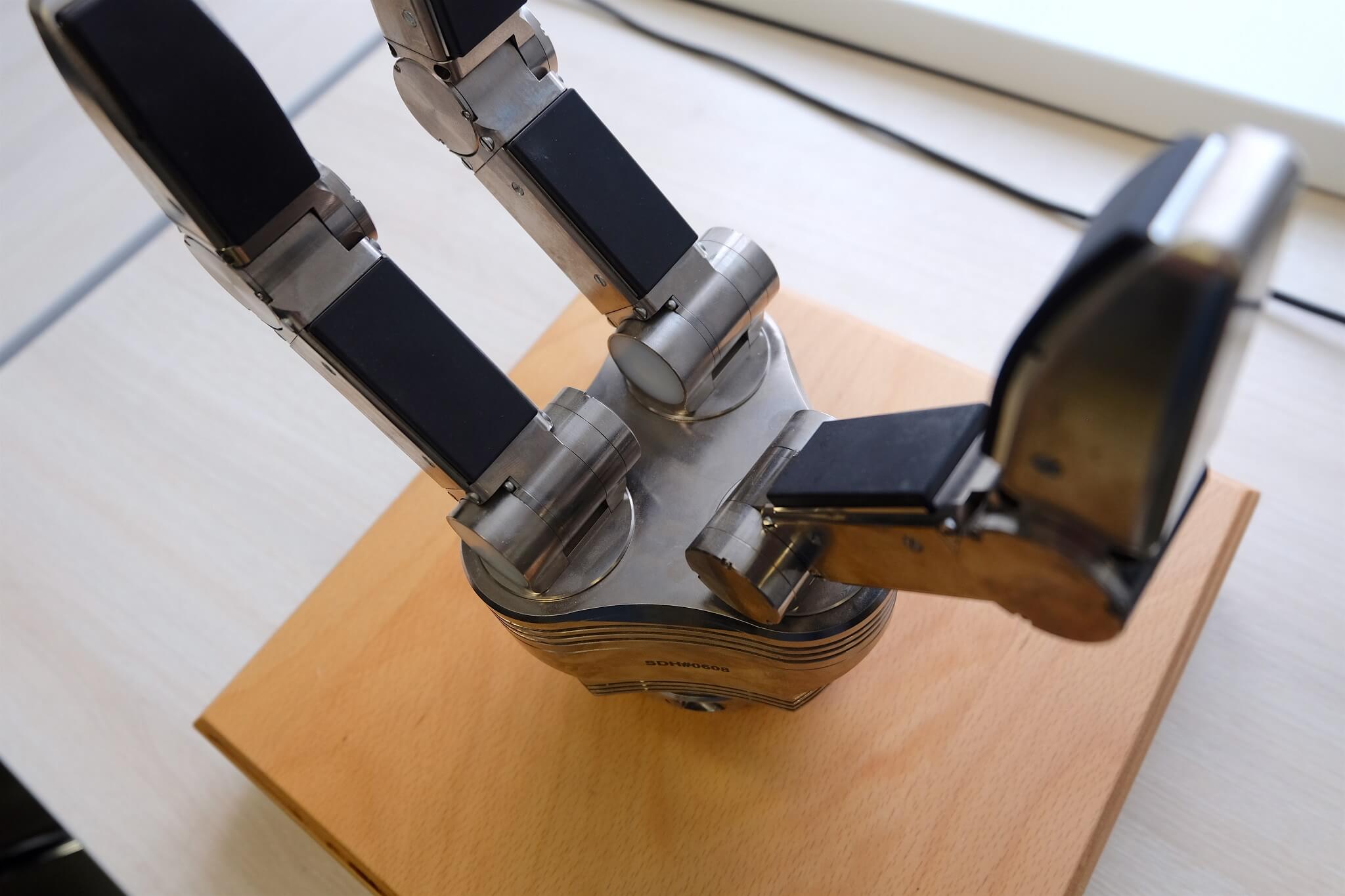
実験室には、指の内面に圧力センサーを備えた3本指のグリッパーもあります。
そのような装置は、損傷を避けるためにグリップ力を正確に制御することが重要である場合、壊れやすい物体の取り扱いを可能にします。
実験室には、動的位置決めシステムをテストするために設計された水上船舶のロボットモデルがあります。
このモデルには、いくつかのエグゼクティブドライブと、制御信号を送信するための無線通信ハードウェアが搭載されています。

実験室にはプールがあり、そこでは、縦方向および横方向の変位を補正して水面船の小さなモデルの位置を維持するための制御アルゴリズムの操作性がチェックされます。
現在、複雑なシナリオを伴う大規模なテストのために、大きなプールを編成することが計画されています。

パートナーや計画と連携する
パートナーの1つは、英国の企業TRA Roboticsです。 私たちは協力して、デジタル製造企業向けの産業用ロボット制御アルゴリズムの改善に取り組んでいます。 このような企業では、工業製品の開発から製造までの生産サイクル全体がロボットとAIシステムによって実行されます。
他のパートナーにはElektropriborの懸念があり、それとともにメカトロニクスおよびロボットシステムを開発しています。 私たちの学生は、計装、ソフトウェア開発、生産タスクの分野で従業員を支援します。
また、ゼネラルモーターズと協力し、InfoWatchと一緒にロボット工学を開発しています。 また、実験室のスタッフは、 Navis JSCという会社と緊密にやり取りします。NavisJSCは 、水上艦の動的測位システムを開発するプロジェクトを実施しています。
ユースロボット工学研究所は 、学生が世界クラスの競技に備えるITMO大学に基づいて運営されています。 たとえば、2017年に、私たちのチームはコスタリカのワールドロボットオリンピアードで優勝し、 2018年の夏に、学生は全ロシアのオリンピックで小学生向けに 2つの賞を受賞しました。
より多くの業界パートナーを引き付け、ロシアの若い科学者を教育する予定です。 おそらく彼らは、人間の世界を有機的に補完するようなロボットを開発し、企業でより日常的で危険なタスクを実行するでしょう。