OSCAR(オープンソースCAR)は、オープンソースのStarLine無人車両の研究プロジェクトであり、ロシアの最高のエンジニアリングマインドを組み合わせています。 OSCARプラットフォームを呼び出したのは、車に関するすべてのコード行をコミュニティに公開したいからです。

プラットフォームの解剖学
車両のユーザーとして、車の所有者は安全に、快適に、時間通りにポイントAからポイントBに移動したいと考えています。 ユーザーストーリーは多様で、旅行や仕事、買い物、友人や家族との付き合いで終わるまで、常に道路を監視する必要はありません。
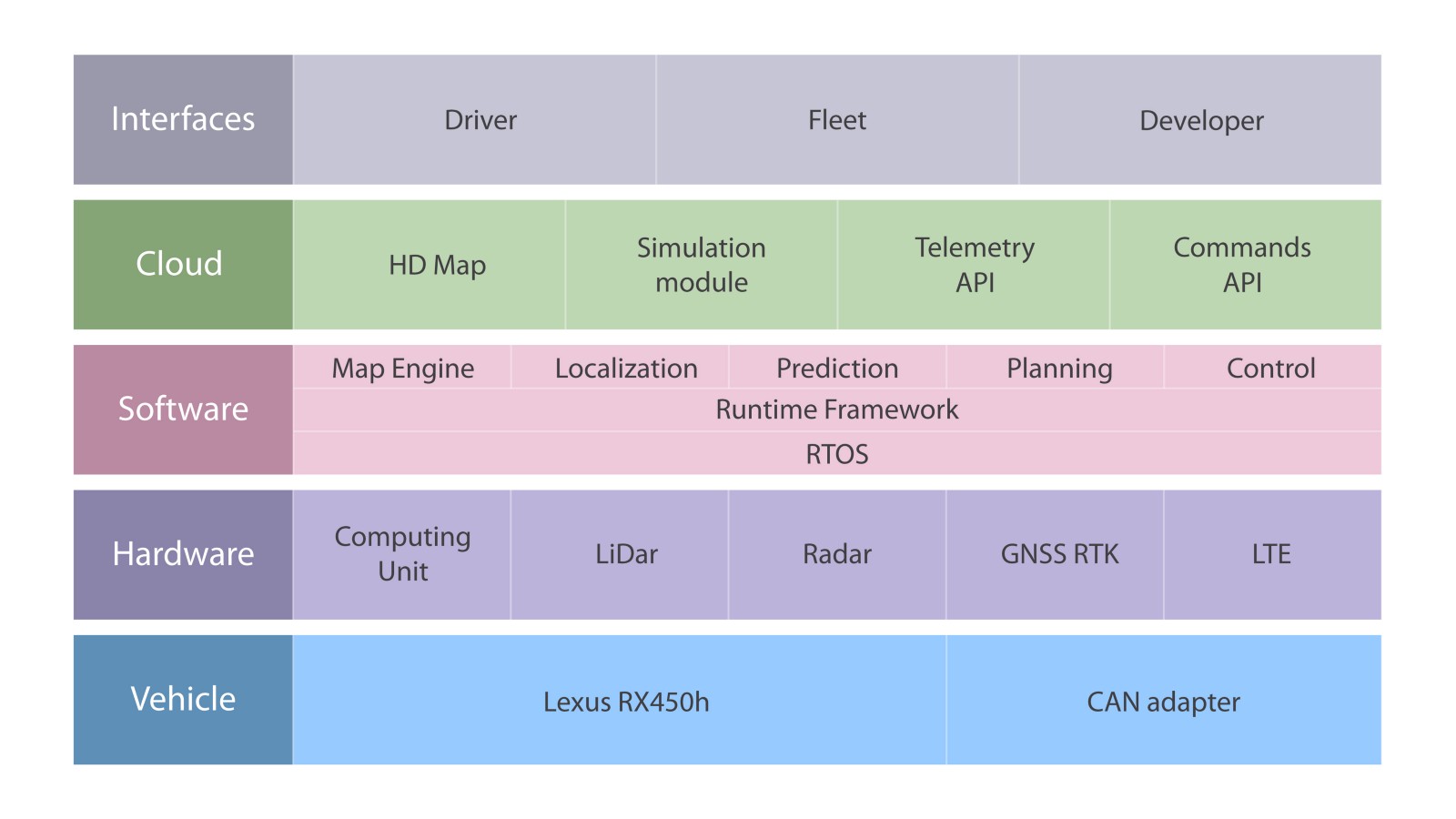
したがって、プラットフォームの最高レベルはユーザーアプリケーションと環境です。 個人ユーザー、商用ユーザー、プラットフォーム開発者の3つのユーザーグループを楽しみにしています。 現在、これらの各グループに対して、個別のインターフェイスを設計しています。 2番目のレベルはサーバー部分です。これには、高解像度カード、シミュレーションモジュール、および自動車に対応するAPIが含まれます。 ソフトウェアレベルは、車に組み込まれるプログラムの作成です。 また、プラットフォームの2つの下位レベルは車自体の作業であり、マシン自体のデジタルインターフェイスの検査と機器の設置が含まれます。
車
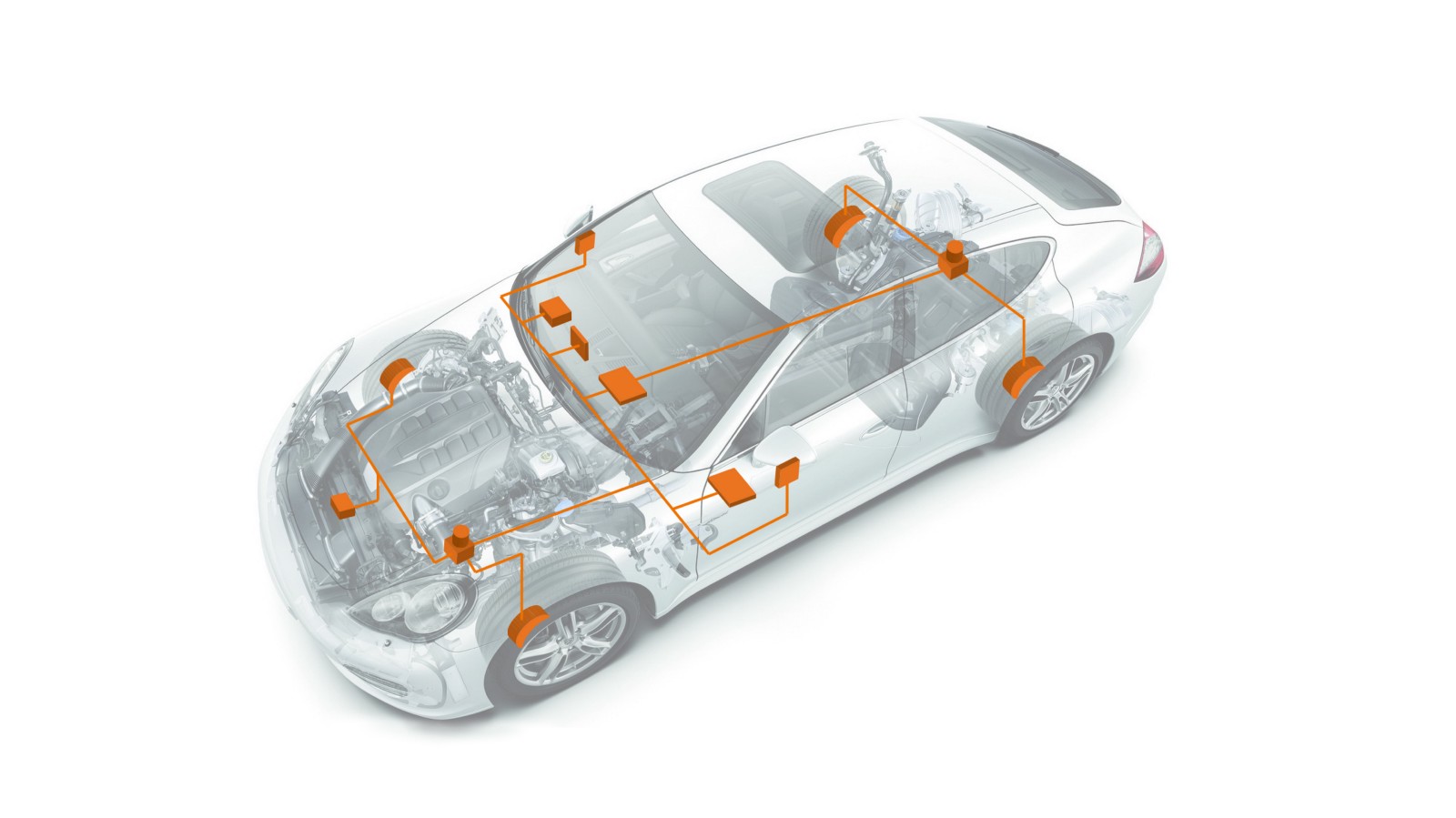
現代の自動車には、さまざまなサブシステム用に最大70の電子制御ユニットを搭載できます。 通常、最も強力なプロセッサはエンジンコントロールユニットですが、他のものはトランスミッション、エアバッグ、アンチロックブレーキシステム、オーディオシステム、ミラー調整を制御するために使用されます...それらのいくつかは独立したサブシステムを形成し、他のものはそれらの間で情報やコマンドを交換します。
車両デバイス間の通信を確保するために、CAN標準が開発されました。
CANバスは、産業用ネットワーク標準であり、デジタル通信システムおよび自動車の電気機器の制御です。 車のデバイスは、データを送受信するためにCANバスに並列に接続されています。 このデジタルインターフェイスにアクセスすると、たとえば、制御コマンドを使用して、エンジンをオンにし、ドアを開け、車のミラーを折り畳むことができます。
車の加速とステアリングを制御するには、CANバスにアクセスし、対応するパケットタイプを理解する必要がありました。 NPO StarLineは電子機器のメーカーであるため、独自のCANバスアダプターを開発しました。

現在、ラップトップを使用して操縦、ブレーキ、加速することができます。

装備品
作業の重要な領域は、車両にセンサーとセンサーを装備することです。 無人車両を装備するには、いくつかのアプローチがあります。 たとえば、一部の企業は高価なLIDARを使用していますが、他の企業はそれらを拒否し、他のデバイスの読み取り値に制限しています。

現在、無人のStarLine車には、いくつかの単眼および双眼カメラ、レーダー、ライダー、衛星航法が装備されています。
GPS受信機のタスクは、空間内の位置と正確な時間を特定することです。 民間のGPS受信機は、無人車両の位置決めの精度が不十分であり、エラーは数メートルまで可能です。 これは、都市環境における建物の壁からの信号の再反射と、地球の電離層内の衛星からの信号の速度の変化など、予測が不十分な自然要因の両方により発生します。
無人車両の位置決めには、民間のGPS受信機の誤差が大きすぎるため、開発では超精密衛星航法を使用しています。 これを行うために、GNSS RTK受信機が車にインストールされました。これは、より高度な測位技術を使用し、衛星航法によってのみセンチメートルの測位精度を達成します。
しかし、運転中に、車はトンネルや橋の下に行き着く可能性があり、衛星からの信号が弱すぎるか、完全に欠けています。 このため、GNSS-RTKレシーバーの精度が低下するか、測位が完全に不可能になります。 これらの場合、車は走行距離計と加速度計の測定値を使用して位置を調整します。 いくつかの異なるソースからのデータを組み合わせて不確実性を減らすアルゴリズムは、センサー融合アルゴリズムと呼ばれます。
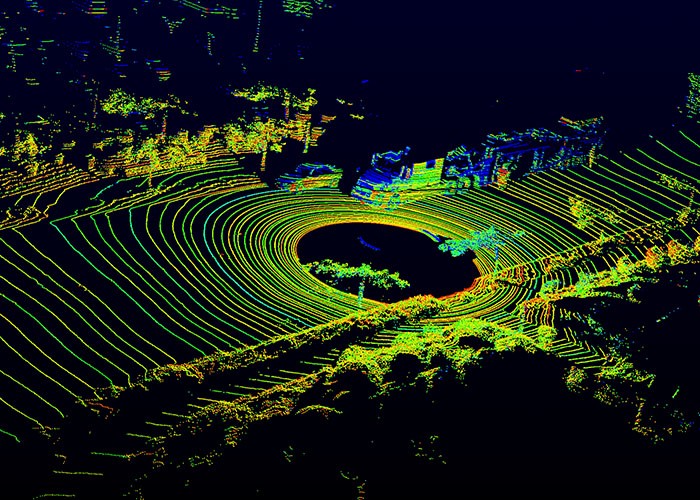
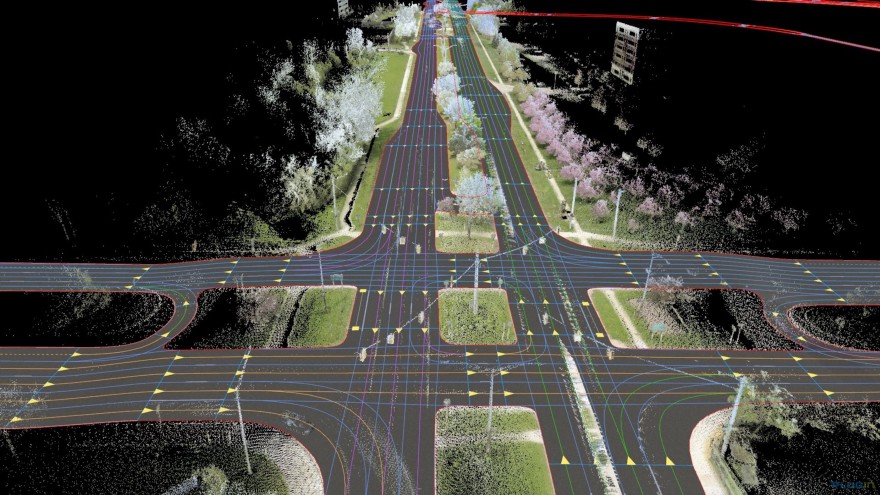
無人車両の位置を特定するタスクに加えて、地図上にない動的な障害物、たとえば近くを移動する車や道路を横断する人などのアイデアも必要です。 これらの目的のために、無人車両はレーダーとライダーのデータを使用します。 レーダーは電波を使用して障害物を検出します。また、ドップラー効果により、障害物の半径速度を計算できます。 Lidarは、周囲の空間を常にスキャンし、3次元マップ、いわゆるポイントクラウドを形成するアクティブな光学式距離計です。
無人車両で使用される各デバイス(カメラからRTK GNSSユニットまで)は、インストールする前に構成する必要があります。
ソフトウェア
最大規模のドローンソフトウェアは、認識、計画、ローカリゼーション、制御などのいくつかのモジュールで構成されています。
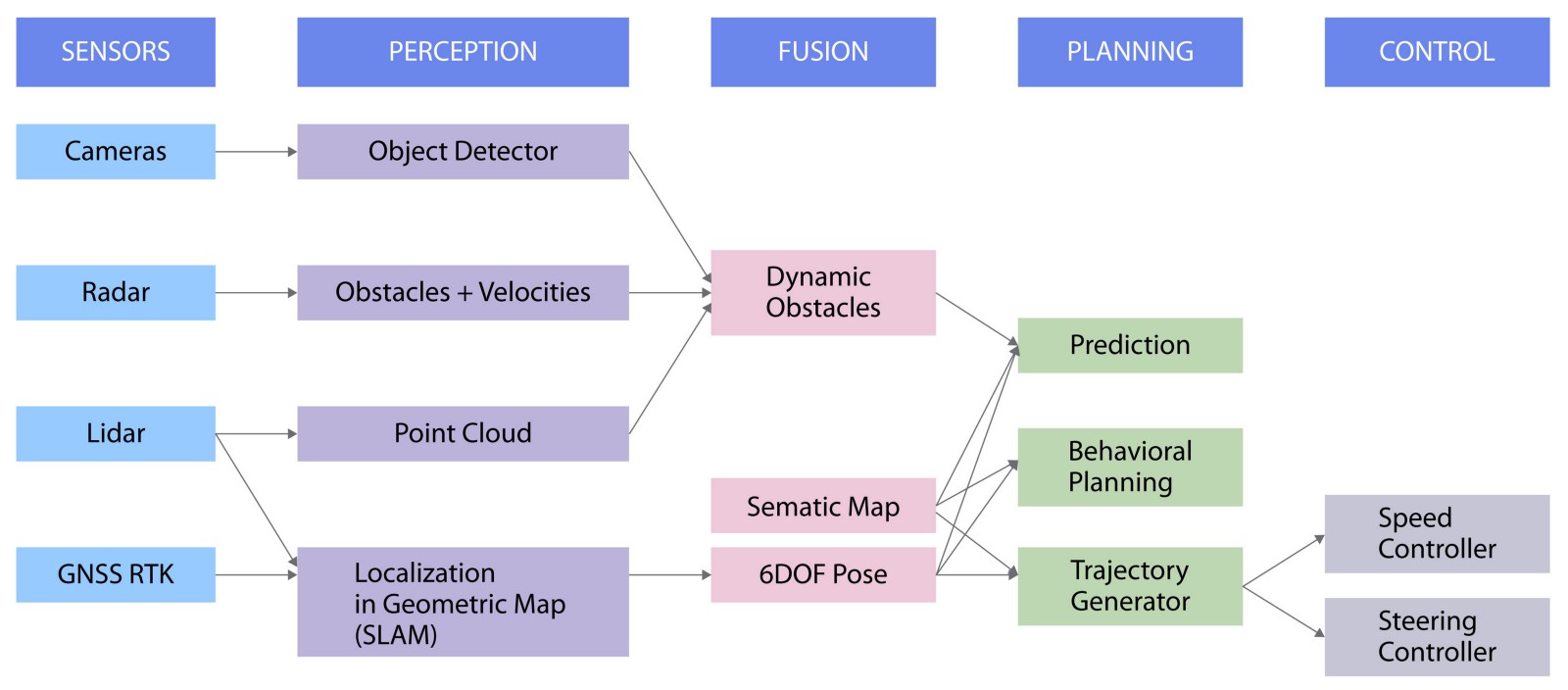
カメラからのデータはオブジェクトの認識と検出に使用され、レーダーは周囲のオブジェクトの座標と速度を受信し、LIDARはアルゴリズムに点群を提供し、GNSS RTKモジュールは衛星データを使用して車の位置を特定します。
次に、最初の3つのソースからのデータを組み合わせて、車の近くの障害物に関する情報を取得します。
同時に、衛星とLIDARの両方の測定値を使用してSLAM問題を解決します。これは、地形の位置特定とマッピングを同時に行うことを意味します。 これは、未知の環境のマップを作成し、その中のオブジェクトの位置を追跡するためのアプローチです。 この情報は、3つの空間座標と3次元速度を含む自動車の6つの座標を計算するために使用されます。
次のステップは、車両の局所的な軌道を計画することです。 最後のステップは制御モジュールです。これは、軌道建設中に構築された軌道を実際に実行するために使用されます。
現在、私たちは機器のセットアップと設置に従事しており、車の制御モジュールにも取り組んでいます。
クラウド
サーバー部分は4つのブロックで構成されています。
- HDカード
- テレメトリAPI
- コマンドAPI
- シミュレーションモジュール
まず、車を正確に特定するためのマップ用のストレージと、データ分析用のテレメトリサービスが必要です。 これは初期のサーバーアーキテクチャ図で、2つのブロックが含まれています。 後でコマンドAPIを使用して拡張し、サーバーから車に制御コマンドを送信できるようにします。 シミュレーションモジュールも追加します。
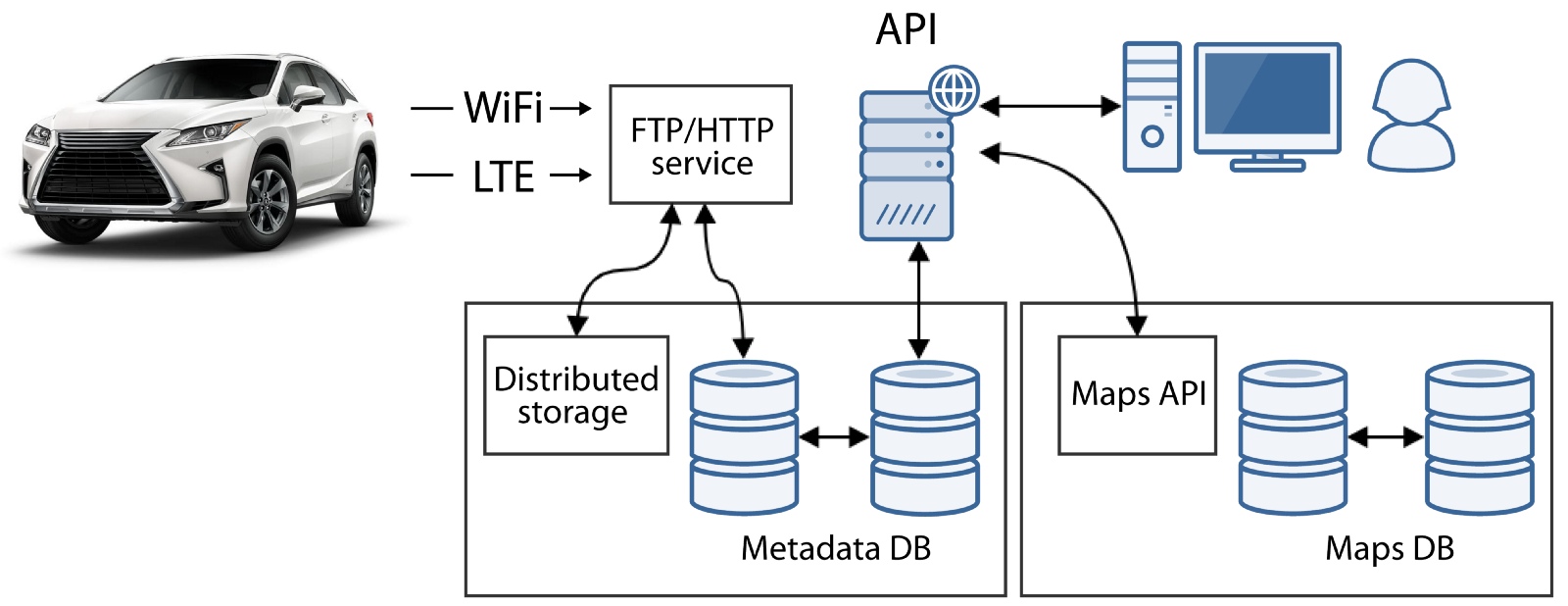
HDマップは、車線、標識、信号機に関する情報など、道路インフラストラクチャに関連するすべてのものを含め、センチメートルまで正確な現実世界の完全な画像を提供するマップです。 また、マップにはLIDARデータが含まれており、ドローンの位置を特定できます。
シミュレーターは、デバッグおよびテストのためにトラフィック状況を生成するために必要です。 交通状況をシミュレートすることで、任意のマイル数のカスタマイズ可能なシナリオとまれな条件で、実際の道路でのテストに必要な時間とコストの一部でユニットテストを実行することにより、アルゴリズムの堅牢性を高めることができます。

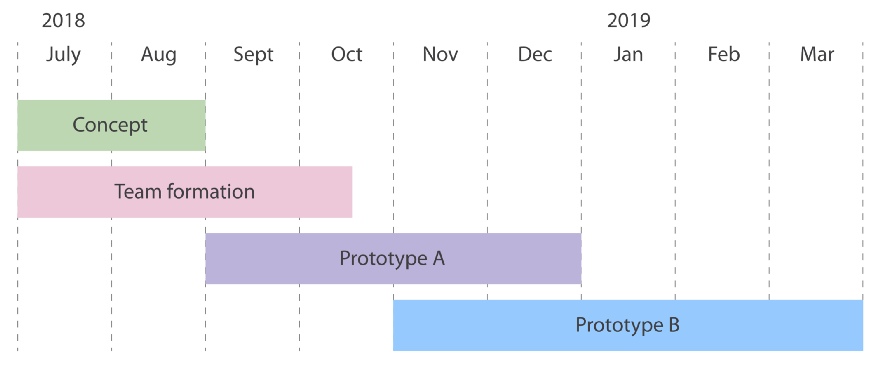
ロードマップ
7月に、コンセプトの開発、チームの作成、プロトタイプAへの道のりを開始しました。プロトタイプAは、ウェイポイントに沿って移動できますが、障害物を回避するにはオペレーターの介入が必要です。 2019年春までに開発を完了する予定のプロトタイプBは、ドライバーの制御なしで障害物を回避できる車です。
それで、ドローンの心臓には何がありますか?
車の中心にあるのは、高度なアルゴリズム、データストリーム、高性能インターフェイス、洗練された機器です。 さらに、車にはハードウェアとソフトウェアだけでなく、サーバーとクライアントのアプリケーションも必要です。 この技術的心はオープンであり、StarLineチームのイニシアチブだけでなく、オープンソースコミュニティの支援にも依存しています。
スターライン無人機の主な目的は、人々の生活をより快適で安全なものにすることです。 技術は私たちにとって重要ですが、技術的および科学的知識は人々に役立つために存在すると信じており、これが私たちの努力の真の心です。 私たちは、交通安全が機器によって提供される日に近づいており、人々は自分にとって重要なことにもっと時間を割く機会を得るでしょう。 そして、あなたが私たちの視点を共有するなら、私たちはあなたに明日のテクノロジーを創造するために私たちと一緒に参加することを歓迎します。
Gitlabプロジェクト