おそらくすべてのドライバーは、時々彼の運転スキルを評価しようとします。 たとえば、子供に車の運転方法を教えるとき、前の車が左に曲がるか右に曲がるかをどのように、そしてなぜ知っているかを考えます。 道路に沿って歩く犬に自動的に注意が向けられるのに、道路にぶら下がっている木の枝には反応しないのはなぜですか。 そのような質問はたくさんありますが、すべてに対する答えはありません。
運転する方法を学ぶためには、多くの原則を理解し、ルールを知る必要があります-これは人間と人工知能の両方に当てはまります。 後者は、何千もの要因を評価することに注意を払う必要があります-どこで、いつ減速するか、どこでオフにするか、どこで加速するか。
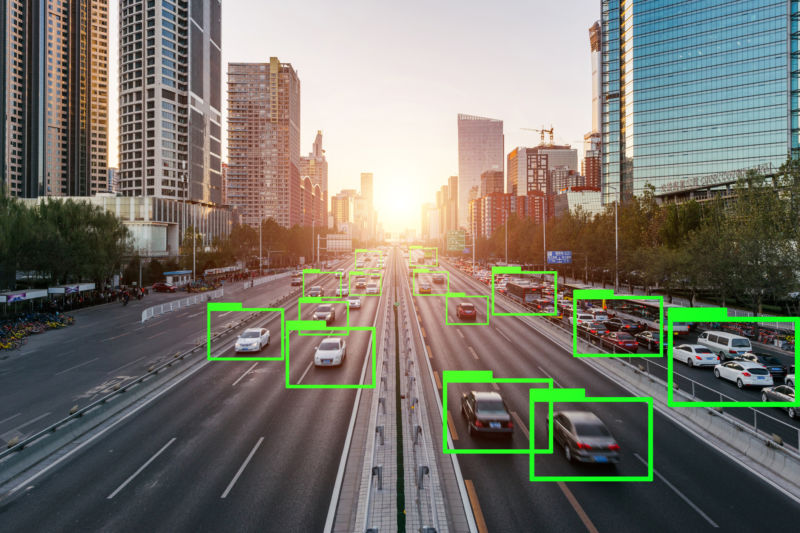
最高レベルの自律性を備えた車は、マーキング、信号、その他すべてを認識するだけでなく、道路上の多くの異常な状況に迅速に対応できる必要があります。 開発が長年にわたって行われているロボモービルでさえ、そのような状況に常に適切に対応するとは限りません。
例としては、Uberロボット車があります。そのソフトウェアは、道路上の暗黙のオブジェクトを無視することを決定し、暗い服を着た女性であることが判明しました。
現在、機械の6つのレベルの自律性を識別するのが慣例です-ゼロ(すべての操作は人によって実行され、自律性はありません)から5番目(すべての操作は人間の介入なしでオンボードコンピューターによって実行されます)。 ほとんどの場合、ロボモービルは、高度な自動操縦機能を備えた悪名高いテスラを含む、第2レベルの自律性に達しました。
ダイムラーは順調に進歩していますが、ロボカーはドイツでテストされており、道路標示とそれら自体はほぼ完璧であり、ドライバーは伝統的に道路の規則に従います。
Waymoも順調に進んでいます-先日、完全に自律的なrobotaxサービスの開始を発表しました。 確かに、運転手はまだキャビンにいます。会社が「セキュリティオペレーター」と呼んでいます。 何か問題が発生した場合、オペレーターが制御します。 おそらく、より高いレベルの自律性を備えたロボモービルは、20代まで道路に登場しませんが、多分そうです。 そして後で。
おそらく、完全な自律性は、ロボモバイル自体よりもはるかにスマートである必要がある特殊なインフラストラクチャの出現後にのみ達成できます。 後者は、周囲で何が起こっているかを独立して学習し、理解する必要があります-オペレーターの参加なしに決定を下します。
一例は、乗客が雨の夜にロボモービルで移動する状況です。 突然、猫が前方の道路を横断します。 ロボモービルは何をすべきですか? 明らかに、彼のシステムは前方の障害物を確実に認識し、マシンが必要な操作を実行する必要があります。 しかし、アスファルトの滑りやすさを想像し、その時点で車がどこにいるかを理解するために、速度のローカルルールを知る必要があります。 一部の情報はサードパーティのソース(同じ天気予報、温度、湿度、風の条件)から取得できます。これには、広く信頼性の高いインターネットチャネル(おそらく5G)が必要です。
猫に加えて、衝突を回避しようとするロボモービルなど、他の障害物が存在する場合があります。 つまり、任意の時点で互いの行動をうまく表現するために、ロボモービルは「通信」できなければなりません。 そして、リアルタイムで通信する必要があります。 そうでなければ、衝突は避けられず、機械の所有者の健康と生命への脅威に満ちています。
さらに、ロボモービルは最終的な移動地点への最適な経路を舗装できる必要もあります。 そのため、車には地図データ、マークアップ情報、標識などの情報が必要です。 ロボモバイルの機能の範囲を拡大するには、環境に関する情報を交換するために、常に互いに連絡を取り合う必要があります。 しかし、人々が制御するマシンの問題はまだあり、ロボモービルを備えた通信システムも装備する必要があることがわかります。そうでなければ、後者は前者が何をするのか理解できません。
問題が一時的なものであっても、最も広い通信チャネルで何かが起こる可能性があることを想像すると、状況はさらに複雑になります。 また、「トロリーの問題」のような通常の問題や、その他の多くの問題については言及していません。
最も可能性が高いのは、AIが4〜5レベルの自律性を今後数年間は期待できないことです。すぐに登場するでしょう。