改良された3次元知覚と触覚を備えた新世代のグリップとして、広範囲からオブジェクトを操作することを学びます

この記事の著者によって設立されたRobotic Materials Inc.によって作成されたキャプチャは、東京ワールドロボティクスサミットで産業用組立競技を操作するタスクを実行します。
ロボットは1961年以来朝食を調理することができましたが、実世界での汎用操作(MES)は自動運転よりも複雑な問題である可能性があります。 しかし、なぜそうなのかを正確に説明するのはかなり困難です。 1961年のビデオを注意深く見ると、2本指のパラレルキャプチャがかなり多数のタスクに適していることがわかります。ロボットに埋め込まれた感覚や常識の欠如によってのみ、ロボットは現実の世界で同様のタスクを実行できません。 サイエンス誌の最近の記事は、 家具の組み立てなどのタッチが豊富な作業であっても、既存の産業用ロボットの能力の範囲内であることを思い出させてくれました。 本当の問題は、可能な動きと操作の膨大な数であり、バターでサンドイッチを作るために必要な動きは、椅子を組み立てるのに必要な動きと必ずしも一致しない。
産業の観点から、MESは対処すべき問題ではないかもしれません。 エスプレッソを作る、皿を洗う、小麦を組み立てる、体操靴の大量生産など、何でもできる機械を作ることができます。 それが、現代の産業でロボット工学のほとんどが使われている方法です。 「コラボレーションマシン」として宣伝されているロボットでさえ、基本的に組立ラインのより複雑なマシンの一部になります(安全に作業するために警備員を必要としないだけです)。 科学的に興味深いMESを開発する試みは、そのようなユースケースに関連して測定されます。 このため、問題に対する一般化されたソリューションの利点はそれほど明白ではなくなり、投資家や業界がそれらに関心を失ったときに「非効率な路地」にとどまるリスクを冒します。 ただし、生産および配送プロセスには、膨大な数の異なる操作段階が含まれます。 各ステージの値がゼロになる傾向がある場合でも、それらの合計値は経済的に重要です。
操作の問題の解決策がこの値を明らかにするのに十分一般化されることをどのように知るのでしょうか? ロボット開発コミュニティは、さまざまな問題を解決するか、さまざまなオブジェクトを操作する必要があるいくつかの競争オプションを提案しています。 これらは、たとえば、 RoboCup @ Home 、 IROS 、 Amazon Picking Challengeなどのコンテストです。 これらのコンペティションは一般化されたソリューションを求めてキャンペーンを展開していますが、特殊なソリューションではうまく対応できないタスクを考え出すことは依然として困難です。 たとえば、韓国で優勝したIROSチームは、 バクスターロボットと自己粘着性の発泡ブロックシステムを使用して、皿やスプーンなどのアイテムを操作しました。 同様に、Amazon Picking Challengeのほとんどのタスクは、1台の真空ポンプで実行できます。 実際、これらすべてのタスクにうまく対処できる操作のための単一のソリューションが必要です。
東京で開催された世界ロボティクスサミットの産業コンペティションでは、物事のさまざまな見方が提供されました。そこでは、コンテナを積み込み、1日で切り替えることができるアイテムを組み立てるいくつかの産業タスクの一般的なソリューションを提供できるチームに賞金130,000ドルを提供しました。 チームはまず、バスケット(M3ナットから電動モーターや柔軟な駆動ベルトまで)から非常に異なるサイズのオブジェクトを取得し、それらをコンテナーに入れてから、それらから複雑な構造を組み立てる必要がありました。 このような競争には、オブジェクトをキャプチャして操作できるだけでなく、競争の日中に簡単に再プログラムできる操作ソリューションが必要です。 このようなロボットの作成が成功した場合、家具の組み立て、移動の支援、または人々が簡単に理解できる他の操作タスクのアシスタントとして使用できますが、現代のロボットはできません。
真空ポンプ、グリップ、ソフトロボット
MESを達成するためのオプションはありますか? 産業オートメーションでは、ポンプ、メカニカルグリップ、アーム、さらに最近ではソフトロボットの3つの競合するパラダイムが支配的です。 位置が正確にわからない場合でも、カップの吸引カップが変形して物体の形をとるため、ポンプは手前にあります。 その後、空気を吸い出すと、ボウルが固くなり、オブジェクトの動きに環状の制限が生じます。 これは魅力的なオプションです。1つのカップの吸引カップで多数の異なるオブジェクトをキャプチャできるためです。 ただし、吸引カップはすべての問題を解決するわけではありません。たとえば、オブジェクトが重すぎたり、多孔質だったり、さらに操作するにはオブジェクトを正確に移動したり、特定のエフェクトを適用したりする必要があります。
吸引カップだけでは穴のある物体をつかむのが難しい
機械式グリッパーを使用する場合、力の正確な適用を使用できます。機械式グリッパーは、ほとんどの場合、平行グリップまたは2つの4リンク機構の形で実装されます。 3本指のソリューションはあまり頻繁に使用されず、必要に応じて、上から円筒形の物体をキャプチャします。 タイトグリップの問題は、不必要なインパルスの送信を避けるために、グリップ速度をオブジェクトに接触させてゼロにする必要があることです。 弾性接触の場合、衝撃が維持され、その結果、小さな物体が高速でキャプチャから跳ね返ります。 弾力性を高めるには、変形可能なグリップを適用して接触可塑性を高め、知覚の精度を高めてグリップを時間通りに閉じるか、オブジェクトの動きを制限します。
極端な場合、これらの手段は、完全に柔らかいグリップの使用につながり、その変形性は物体の跳ね返りを防ぎ、柔らかさは知覚の必要な精度を低下させます。 キャプチャの成功は、摩擦を最大化し、オブジェクトの回転自由度を減らすために、大きな接触面積にあります。 2本指のグリップを使用して四角い棒をキャプチャする場合、指が棒の2つの平面に平行になるように配置する必要があります。 ソフトグリップは、単にオブジェクトを囲むため、ロッドの向きを決定してグリップを計画する必要はありません。 しかし、グリップの変形性により、知覚と計画の要件が緩和されるため、労力の制御された適用が複雑になります。 柔らかい手の中のオブジェクトの位置は不明であり、その変形性により、制御された方法で力を加えることはできません。 オブジェクトをキャプチャしてからドロップする場合、これは問題ではないかもしれませんが、オブジェクトを持ち上げて正しく配置する必要がある操作を大幅に複雑にします。
簡単な位置制御を組み合わせて、モーターの最大トルクを制限することにより、実用的な結果を得ることができます。 変形可能なソフトロボットアームと同様に、抵抗制御を備えたグリップは物体に合わせて調整でき、知覚の不正確さを補います。
したがって、理想的なグリップは必要に応じて硬くまたは柔らかくなり、最小限の知覚と計画でオブジェクトをキャプチャし、オブジェクトの場所の不確実性を排除し、厳密な操作が可能になります。 同時に、キャプチャ表面はオブジェクトとの継続的な接触を維持する必要があります。 これは、上記の手法を組み合わせることで実現できます。 たとえば、ソフトグリップは粒状の詰まりで硬くなるか、吸引機構にグリップを追加して制限を追加することができます。 メカニカルグリップには、吸着カップまたは静電パッドを追加して、壊れやすい接着を実現できます。 人間の手はこれらの特性を組み合わせて驚くべき仕事をします。硬骨と軟組織の組み合わせにより、硬さを変えることができ、オブジェクトを覆うことができ、正確に制御する能力を維持します。 これらの機会は、柔らかい指のパッド、肌の摩擦、および付着する能力によって実現されます-紙の小片が指に付着するように。
トルク制御グリップ
到達しやすい機能のいくつかにより、ソフトロボットと従来のロボットの利点を組み合わせて、商業的に魅力的なMONソリューションを作成できます。 それらの1つは、従来の2本指グリップに適用される抵抗制御です。 抵抗を制御することにより、環境によって課される外部の動きに対する抵抗を制御します。 単純な位置制御とモーターの最大トルクの制限を組み合わせることにより、実用的な結果を得ることができます。 トルクを制限することにより、剛性グリップを任意に変形可能にすることができます(トルクセンサーの精度内)。 完全に変形可能な同等品のように、抵抗制御を備えたグリップはオブジェクトに適応でき、不正確な知覚を補います。 同時に、そのようなスキームは、正確な操作にとって困難になる可能性があります。 指の位置の知覚とともに抵抗制御は、触覚の一種です。 キャプチャは、環境内のオブジェクトの存在を判断し、位置とトルクを追跡できます。 動きは柔らかく、知覚の不正確さを補います。

上:抵抗制御を使用してイチゴをつかむ。 最大許容トルクを下げると、障害物と接触したときに指が止まり、ベリーをつぶすことができなくなります。
下:抵抗制御で固体オブジェクトをキャプチャします。 トルク制御により、接触するまで指を動かすことができます。 各指の位置を知っていると、腕全体のレベルで位置の制御に入ることができます。
トルク制御グリップは、最近の研究をソフトアームに変換するためのプラットフォームとして機能します。指先と手のひらを吸引カップで補完し、正確な位置制御と労力の利点を吸引カップの信頼性と組み合わせます。 指の関節にあるトルクセンサーは、グリップに戦略的に配置された圧力を測定する触覚センサーで補うことができます。 手のひらと先端の触覚センサーは、外部の障害物が指の動きを妨げるのか、手が目的の物体に触れるのかを区別するのに役立ちます。 また、触覚センサーは視覚センサーを直接追加し、接触の瞬間を判断し、オブジェクトの方向と手でつかんだ場所の評価を改善します。
三次元知覚の現代の成果により、MESの目標はかつてないほど近くなりました。 Intel RealSenseなどの3次元センサーは、カメラから11 cmの位置にある物体の存在を正確に検知できるため、M3ナットなどの小さな物体でもキャプチャできます。たとえば、私の研究室の研究に基づいたRobotic Materials Inc.彼女の手のベータ版をリリースしました 。 正確な3次元知覚、環境との穏やかな相互作用のための抵抗制御、およびキャプチャの成功を評価できるさまざまな触覚方法の共同作業により、不正確な環境でのオブジェクトの信頼できる操作を実装できます。
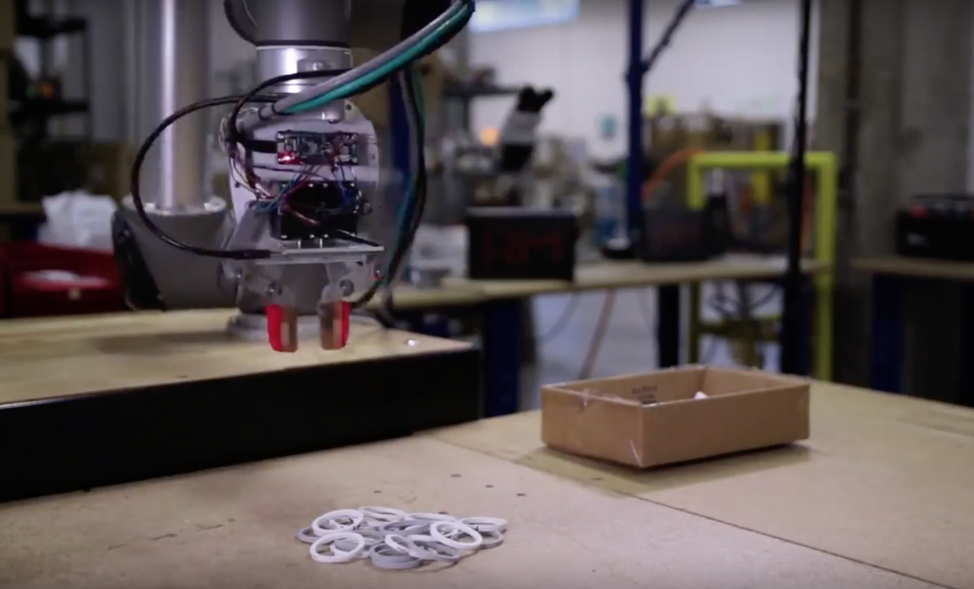
たとえば、私たちは最近、ロボットが3つの異なる種類(M3ナット、メカニズムの一部、ゴム製ストラップ)のオブジェクトをバスケットから取得する必要があるコンテナのモバイル充填を実証しました。テーブル上の場所はおおよそしかわかりません。 倉庫のさまざまな境界点に沿って移動する自律輸送によって導入された10 cmの誤差にもかかわらず、ロボットは、手に組み込まれた3次元の知覚を使用して個々のバスケットとオブジェクトを検出できました。 トルク制限は、バスケットの内容物と正確に相互作用し、起こりうる衝突の影響を最小限に抑えるために使用されます。 トルク測定を使用した触覚は、グリップの成功を測定するために使用されます。
MESの場合の3次元知覚、抵抗制御、および触覚の印象的な成功にもかかわらず、これらの技術は、マニピュレーター用の特殊なソリューションの一般的な産業パラダイムと矛盾しています。 あらゆる形態の知覚には時間がかかり、予期しない影響のエネルギーを制限するために必要なキャプチャ速度に制限を課します。 そのため、MESの最前線には、大規模な品揃えと少数の製品で動作する中小企業と、製品を差別化し、生産サイクルを短縮し、カスタマイズの可能性を高めたい大企業が存在します。 同時に、移動ロボットは倉庫、ホテル、病院でますます発見されています。 このような状況では、ロード、アンロード、メンテナンスなどの特定の操作により、このようなロボットの価値が大幅に向上し、汎用操作タスクを解決するために必要な経済的前提条件が生じます。