自分の子供の身体的発達の問題は常に関連しています。 最年少の息子は3歳になりましたが、歩くことに加えて、彼はスポーツバイアスのあるクラスを見つけたいと考えていました。 彼はさまざまなタイプの輸送に興味があるため、当然、選択はランバイクにかかっていました。 そして、年長の子供たちがランバイクでスタントするように、焼cenビデオを見てから、私はこの問題をより詳細に研究することにしました。 10自由度のAmperkaのIMU、電源とPythonの40行のコードを備えたRaspberry Zero Wを装備して、ランニングスクールに行きました。 それの由来-カットの下を見てください)

ランバイクは、子供用の自転車やスクーターほど普及していませんが、他の交通手段と比べていくつかの利点があります。 子供は自転車のようにサドルに座って、2本の足で交互に押すことができます。 これにより、両脚と背中の負荷がより均一になります。 プッシュ脚が1つだけ機能するスクーターとは異なります。 追加のボーナスは、子供がバランスを取ることを学ぶことです。 つまり、二輪自転車へのさらなる移動は、合併症なしで起こると思われます。
基本的に、ランバイクの設計は非常にシンプルです。 これは、金属フレーム(アルミニウムまたはスチール)、ステアリングホイール、サドル、および2つのホイール(より高価なモデルや発泡ゴムで作られたモデル用にポンピング)です。 後輪サスペンションを備えたモデルがいくつかあります。

後輪の減衰は、特に重要な詳細のように思えました。 ランバイクに乗っている子供は、必然的に縁石から飛び降りて、悪路に乗ります(ロシアに住んでいます)。 したがって、ダンパーの存在は、理論的には背中の負荷を軽減するはずです。 将来、若いライダーのプロ意識が高まるにつれて、ダンパーはジャンプや他の同様のトリックも可能にします。
インターネットで騒ぎ立てて、さまざまな障害物からジャンプするときに自転車のフレームにかかる負荷を誰も以前に定量化していないことがわかりました。 この問題への関心と少しの自由時間は、手元の材料から測定のための簡単なスタンドを集めたという事実につながりました。
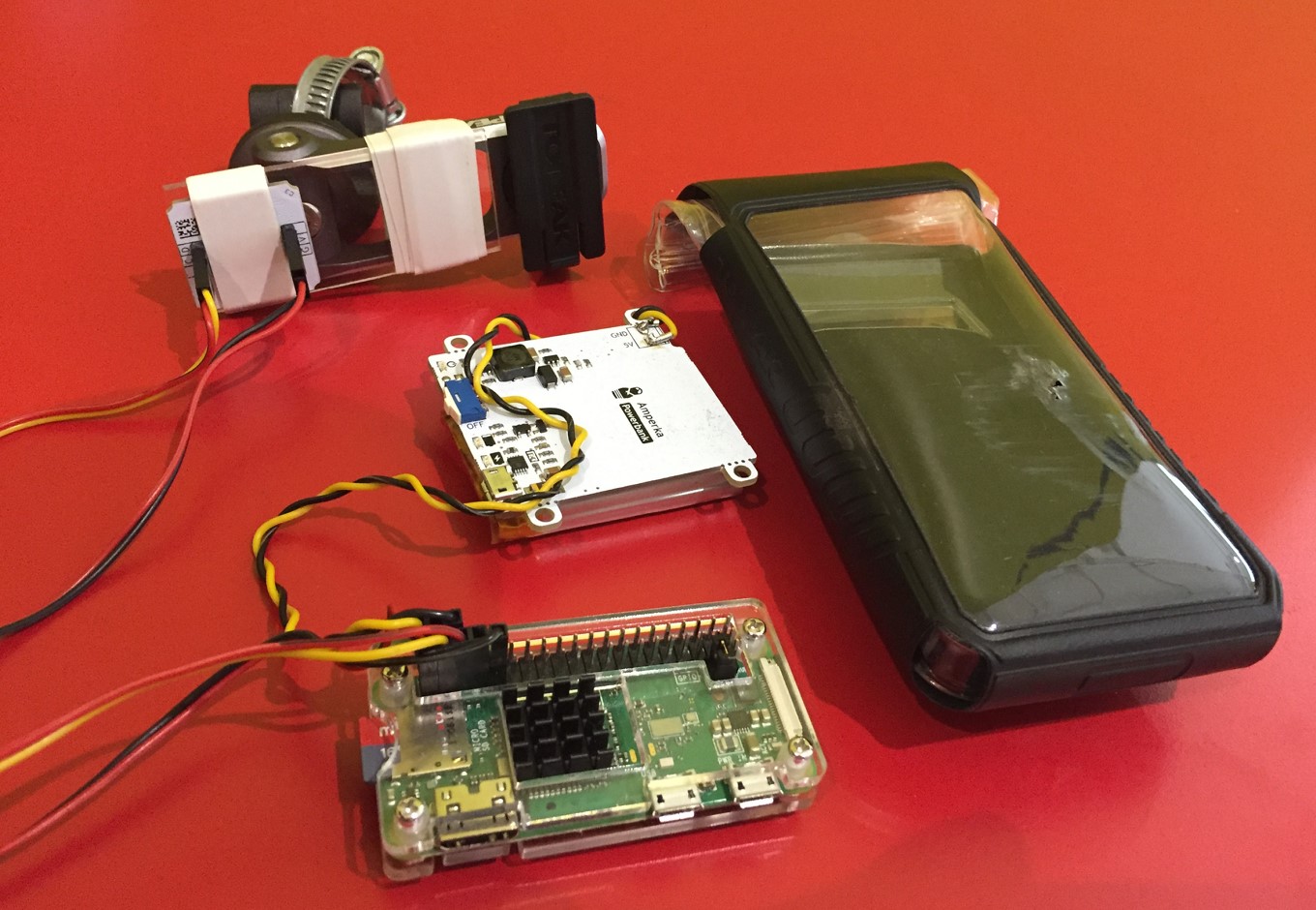
加速度は、Amperka製のIMUセンサーの 3軸加速度計で測定されます。 測定限界が低い(+ -2G)ため、携帯電話の加速度計を使用して加速度を測定することはできません。 Amperkaモジュールの各軸の測定範囲は+ -8Gです。これで十分だと思います。
IMUセンサーは、Topeakホルダー(自転車から一時的に取り外す必要がありました)、プレキシガラス片、電気テープのいくつかの層を使用してフレームに取り付けられました。 シングルボードのRaspberry Pi Zero Wを使用してセンサーをポーリングし、小さなPythonスクリプトで約10ミリ秒の周期で加速度計をポーリングしました。
imu.py
import time from pytroykaimu import TroykaIMU imu = TroykaIMU() imu.accelerometer.set_range('8G') file_name = '' print(' ( )') file_name = str(input ()) file_name = file_name + '.csv' print(' , Ctrl+C') t0 = time.time() imu_array = [] while True: try: ax, ay, az = imu.accelerometer.read_gxyz() gx, gy, gz = imu.gyroscope.read_radians_per_second_xyz() imu_array += [time.time(), ax, ay, az, gx, gy, gz] time.sleep(0.006) except KeyboardInterrupt: t1 = time.time() lines = int(len(imu_array)/7) print(" - -", lines, '- ', file_name) imu_file = open(file_name, 'w') imu_file.write('time,ax,ay,az,gx,gy,gz' + '\n') for i in range(lines): imu_file.write(str(imu_array[7*i]) + ',' + str(imu_array[7*i+1]) + ',' + str(imu_array[7*i+2]) + ',' + str(imu_array[7*i+3]) + ',' + str(imu_array[7*i+4]) + ',' + str(imu_array[7*i+5]) + ',' + str(imu_array[7*i+6]) + '\n') imu_file.close() print (' , -', t1 - t0, '') break
Power Raspberryは同じAmperkaのPower Bankから削除され、私は端末が彼にインストールされていないセルからリモートスタートしました。 私は携帯電話用のケースに電源付きのシングルボードを隠し、次のようにIMUセンサーを調査対象のランバイクのシートポストに取り付けました。

モスクワのBegovelMsk学校の Evgeny Ivanovと一緒に測定を行いました 。 テスト用のランバイクスクールは、親切に2台のランバイク( Puky LR RideとEarly Rider Trail Runner 14 )を提供しました。 これらの2つのモデルは、ランニングスクールでよく使用されます。1つ目は主にトリック用、2つ目は自転車のランニング用です。 両方のモデルのタイヤは、約3.5気圧まで膨張しました。
このテストは、ライダーのArtyomが、テストされたランバイクの小さな踏み台から飛び降りたという事実から成り立っていました。

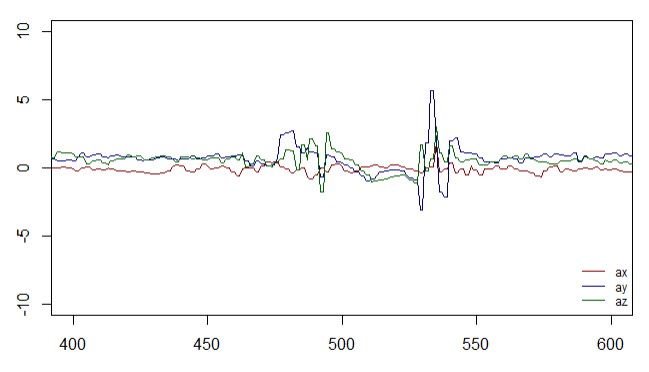
その結果、SDカード上のジャンプごとに、Raspberryは10ミリ秒ごとに加速度計の3つの軸すべてのポーリングでファイルを確定しました。 このようなグラフは各ファイルから導き出すことができ、Gの加速度は垂直軸に沿ってプロットされます。
同様のジャンプのグラフは非常に似ていることが判明しましたが、2つの研究対象のランバイクモデルの加速度曲線は非常に異なっています。 図を簡略化するために、加速度の垂直成分のみを次のグラフにプロットします(実験では、これはY軸を垂直からの偏差角の余弦で割ったものです)。 グラフには、スキージャンプの時間(レースのビデオで決定)とジャンプ後の床に触れる時間(これが振幅の最大信号です)も表示されます。
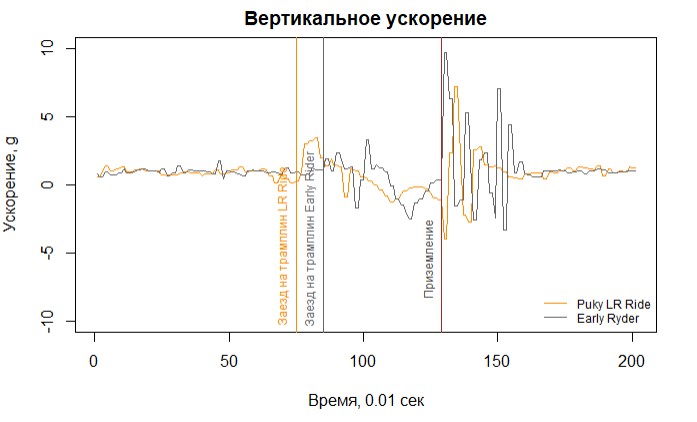
ご覧のように、スキージャンプからジャンプするとき、フレームは実行されています(そして、それと共に子供も)、最大10Gの短期衝撃負荷が発生します! 意外と。 負荷はずっと低いと思いました。 サドルの5番目のポイントから縁石から落ちるのは価値がないと結論付けることができます。 そうでなければ、打撃は子供の背骨と内臓に落ちます。 この負荷を脚に伝達することが最適です。 そのため、Puky LR Rideモデルでは、トリックを実行するときに子供が足になる特別なステップが利用できます。

これらの曲線から他にどのような結論を引き出すことができますか? ほぼ次のとおりです。
- LRライドのダンパーは、ランナーフレームの衝撃荷重を約30%低減します(加速度計が剛性のTrail Runner 14フレームで飽和するため、さらに大きくなる可能性があります)。 また、負荷の増加の性質が変化し、ダンパーのないモデルよりも滑らかになります。
- ダンパーはジャンプの距離を伸ばすのに役立ちます。子供がダイビングボードの前で一種のバネとして使用できるためです(ダイビングボードに入る前にオレンジのカーブに注意してください)。
- ダンパーはランナーフレームの残留振動を減衰させます。ジャンプ後、LRライドは時間と振幅の両方でTrail Runner 14よりもはるかに小さくなります。 これにより、ランバイクのハンドリングとライダーの快適さが向上します。
これらの予期せぬ奇妙な結果は、1つの簡単な実験から得られました。 最後に、ランニングスクール、ライダーのArtyom、コーチのEvgeny Ivanovに改めて感謝の意を表します。

最後まで読んでいただき、新しい会議をありがとうございました!