進化は旅です。 一方で、これは単純なメカニズムのようです-環境によりよく適応した個体はより多くの子供を産み、適応度の低い個体はあまり繁殖せず、その遺伝子は除外されます。 その一方で、彼女は驚くべき多様な生物を生み出すことができました。 羽をつけた翼で飛ぶ動物もいれば、指の間に膜を張った動物もいます。 2本の足で走る人もいれば、4本で走る人もいます。 そして、すべて彼ら自身の方法で彼らの環境に適応しました。
進化は強力であり、ロボット工学の専門家は、今日のインスピレーションを得るためにこの力に頼っています。 オーストラリアの科学者による新しい概念研究では、特定の表面上を歩くように適応したロボットの脚を進化アルゴリズムがどのように生成できるかを調査しています。 結果は、論理的で直感に反し、奇妙なものでした。また、歩行機械を作る新しい方法を示唆しました。
研究者は、特定のサイズに制限された20種類のランダムなデジタルレッグから始めました(悪夢から3メートルのレッグは必要ありません)。 各回路は、 ベジェ曲線と呼ばれる要素に基づいています。 「ベジエ曲線は、Microsoft Paintで見ることができます。ここでは、複数のコントロールポイントの曲線を定義します。3次元でのみ使用します」と、オーストラリア科学産業研究機関のDavid Howard氏は言います。 システムは、これらの曲線を3次元ピクセルのグリッド( ボクセル)に投影します。 「曲線がボクセルと交差するポイントに、マテリアルを配置します」とハワードは付け加えます。 「他のすべては空のままです。」 その結果、各回路は一意になります。
シミュレーションでは、固い土、砂利、水という3つの異なる表面を歩く際の、結果として生じる脚の適合性を調べます。 単純に、自然選択時に発生するような視力やカモフラージュなどのプロパティを選択する代わりに、システムは、特定の表面を歩いているときに特定の長さの脚を回転させるためにモーターが開発する必要があるトルクスキームを選択します。 言い換えれば、良い脚はエネルギー効率の良い脚です。 ボーナスは、より少ない材料を必要とする足にも与えられました。
「足が進む砂利の表面について、各小石に作用する力を計算します」とハワードは言います。 「環境内で足が何をするのかを非常に正確に把握できます。」 同じことが水と固体の土壌でも起こります。
その後、研究者は20本のオリジナルの脚を取り、最高のパフォーマンスを発揮する脚と組み合わせました。 彼らは、娘の脚を作成するために、親の脚に少し似た、最も適応した脚を選択しました。 「何度も繰り返します」とハワードは言います。 千世代にわたって。 その結果、環境要因の影響下で動物が自然に姿を消したため、最悪の結果を示した人口の半分が姿を消しました。 「そして、環境に自動適応を適用します。」

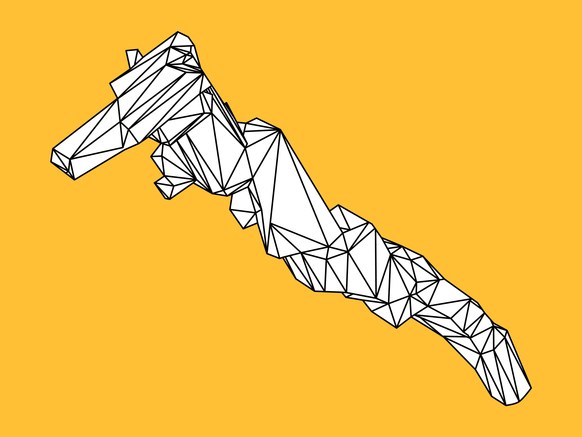
上の画像では、最初の行に脚があります。これは、アルゴリズムが硬い地面を歩くのに最も効果的であると見なしたものです。 中央の列は砂利、水は底に適しています。
刃のような足は、硬い地面を歩くのに最適です。 硬いので、細い足が落ちません。 「だから砂利の足は太く、より広い足跡が必要だ」とハワードは言った。 彼らは足が砂利の上を歩くのを助け、スノーシューのように抜け落ちません。
水に適した太い脚? これはまだ謎です。 「水で奇妙なことが起こりました。硬い表面を歩くような、刃のようなものを期待していました」とハワードは言いました。 これにより、彼らは水を切ることができます。 また、すべての初期タスクを考えると、システムからより細い手足を期待することもできます。 「しかし、細い脚は機能しませんでした。 理由はまだわかりません。」
また、特に土を対象とした脚の突起がかなり奇妙でした。 「彼らには独自の目標があるという理論が気に入っています」とハワードは言います。 しかし、実際には、ボクセルラティスでベジェ曲線をマークすると、その部分は役に立たないように見えますが、実際には脚の内側に構造を提供するはるかに大きな曲線の一部です。 突出部は残忍に見えますが、実際には、助けにはならないだけでなく、足に干渉しないアーティファクトです。 ハワードと同僚は、システムを調整して、システムを認識して自動的に削除するようにしました。
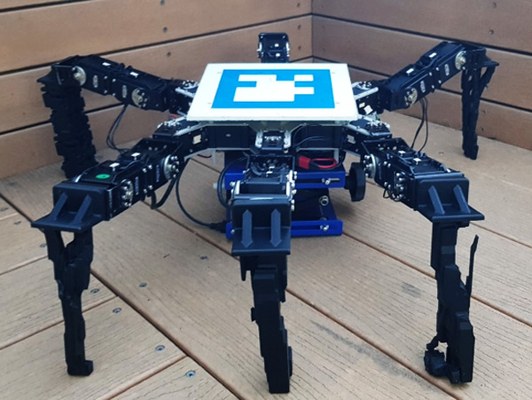
研究者はこれらの脚を3Dプリンターで印刷し、6本足のロボットに接続しました。 現在、彼らは人間によって設計された脚と比較して、実際の表面でその効果をテストすることを計画しています。 チームはすでにそのような脚の例をシミュレーターにロードしており、「進化」の結果として得られた脚は悪くなく、時にはより良い人工の脚であることが判明しました。
なぜロボットの進化をシミュレートするのに努力する必要があるのですか? たとえば、ロボットに特定の表面上を移動するための狭い専門分野を与えることができ、広範囲に使用される脚に基づくことはできません。 理論的には、これにより、たとえば砂丘を克服する場合など、特定の状況でロボットがよりうまく対処できるようになります。
「ロボットを別の環境で使用する場合は、アルゴリズムを単純に再起動できます」と、オスロ大学でロボットの進化の影響下で形状変化を研究し、この作業に参加しなかったトネス・ニガードは言います。 「特定の目的のために特別に設計されたシステムを開発した場合、設計の後の段階で、これはすでに不可能かもしれません。」
伸縮自在の脚を備えた4本足のロボットであるNigaardシステムは、外出先でも進化しています。 試行錯誤(つまり、しばしば転倒)によって、彼は、例えば、氷の表面を歩いて、足を短くして重心を下げることを学びます。 屋内では、彼はそれらを長くして歩幅を伸ばし、運動効率を上げることができます。 これらの2つのテクノロジーを組み合わせることができる場合があります。シミュレーションを使用して適切な足のデザインを開発し、それを変更可能な実際のマシンに組み込みます。
そして、進化がうまくいくことに成功した場合、それは驚くべきことです。 「進化は、はるかに幅広い選択肢で答えを探しています」とハワードは言います。 「彼女は結果物がどう見えるか気にしません。」 彼女は完全に直感に反するように見えるかもしれませんが、人間のエンジニアが考えたようなものではありません。 しかし、それが機能する場合、それ以外は重要ではありません。」