船尾のマーヴィン・ミンスキーは、冷酷な心で感情、感情、痛み、愛、意識を分析します。
§5-7。 想像力
「私たちは物事をそのまま見ていません。 私たちは見ているものを見るのです。」
-アナイス・ニン
キャロルがブロックの1つを拾うと、この行動は彼女にとって信じられないほど簡単なようです。彼女は単にブロックに手を伸ばし、それを取り上げて拾います。 彼女はブロックを見て、演技を始めます。 ここには「思考」はないようです。
しかし、私たちを取り巻く世界の見かけの「単純さ」は、その複雑さを感じることができないことに起因する幻想です。 なぜなら、私たちが見るもののほとんどは、私たちの知識と想像力に由来しているからです。 したがって、コンピュータグラフィックスの先駆者である私の古くからの友人、レオンハーモンによって作られたアブラハムリンカーンの肖像を考えます。 (左は私がレオンで作った肖像画です)

表示されている写真で、鼻や目など、明暗の3点または4点だけの表現されていない特徴をどのように定義しますか? 明らかに、あなたは追加の知識のおかげでこれをします。 たとえば、友人の前のテーブルに座っているとき、あなたは彼らの足も背中も見えませんが、知識ベースの内部脳システムは、これらの見えない詳細の存在をデフォルトで仮定します。 したがって、私たちは知覚的才能を当然のことと見なし、「世界のビジョン」は、心の残りの部分が視覚イメージを知覚するために使用するプロセスに無知であるという理由だけで、私たちには簡単に思えます。
1965年、私たちの目標は、カップに液体を注ぐ、秩序のないビルディングブロックからアーチやタワーを作成するなど、ほとんどの子供ができることのいくつかを実行できるマシンを開発することでした。 [5]このために、さまざまな機械式アームと電子アイを作成し、これらすべてをコンピューターに接続しました。
ビルディングブロックで動作できる最初のロボットを作成したとき、彼は何百ものあらゆる種類のミスを犯しました。 [6]彼は、物理オブジェクトを操作するための十分な知識を持っていなかったため、ブロック自体の上にブロックを配置しようとしたか、同じ場所に2つのブロックを配置しようとしました。 今でも、人間の視覚システムと同じように動作する視覚システムを作成した人はいません。 しかし最終的に、私たちの学生の軍隊は、木製ブロックの配置を「見る」ことができるプログラムを開発し、コンピューターはその前に「他の2つのブロックの上にある水平ブロック」であると結論付けました。

ビルダーと呼ばれるロボットを作成するのに数年かかりました。これはさまざまな作業を行うことができます-たとえば、コンピューターに基づいてソリューションを見せた後、子供のキューブの山から取ったブロックからアーチと塔を構築します。 このロボットを作成するすべての段階で問題が発生しましたが、一連の異なる実行レベルにそれらを組み込むと、欠陥のあるプログラムが動作し始めることがありました。 (それらはモデル6に似ていませんが、具体から抽象まで構築されていることに注意してください。)
個々のポイントの画像から始めます
テクスチャやエッジなどを定義します
それらを領域と形状にグループ化します
それらを可能なオブジェクトに結合します。
身近なものにそれらを関連付けてみてください
空間的関係を説明する

ただし、これらの低レベルの段階では、使用される十分な数の特性を見つけることができません。 この拡大写真の断片を見てください。これは、アーチの正面上部を示しています。
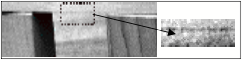
ブロックのエッジは、2つの隣接する領域のテクスチャがほぼ同じであるため、非常に見にくい[7] エッジを定義するために何百もの異なる方法を試しましたが、いずれの方法も適切に機能しませんでした。 その結果、これらの方法を組み合わせることができたときに最高の結果が得られました。 また、検討中の各レベルで同じことを行いました。使用するメソッドはどれも十分ではありませんが、メソッドのアセンブリはさまざまな状況を解決するのに役立ちました。 ただし、最終的には、ビルダーが多くのミスを犯したため、この段階的なモデルは失敗しました。 これは、システム内の情報が入力から出力に直接流れるという事実によるものであり、いずれかのシステムでエラーが発生した場合、それを修正する機会は一度もないという結論に達しました。 この問題を解決するために、多くの「ダウンストリーム」パスを追加して、情報を両方向に強制的に流しました。

私たちが実行するアクションにも同じことが当てはまります。自分がいる状況を変えたいときは、さらなるアクションの計画が必要なので、これらのアクションはすべて「その」のルールに関連しています。 たとえば、「ブロックを見つけたら持ち上げる」というルールは、一連の複雑なアクションにつながります。ブロックを持ち上げる前に、肩、腕、手のひらの動きの計画を立てて、それに影響を与えずにこのアクションを実行する必要があります他のオブジェクト。 したがって、再び高レベルのプロセスを使用する必要があり、計画の作成はさまざまなレベルの情報処理に使用する必要があるため、図は次のようになります。

各アクションプランナーは、特定のエピソードに対応する一連のモーターアクションを作成し、それぞれが特定のモータースキル(「リーチ」、「テイク」、「レイズ」、「ムーブ」など)を実行します。 各モーターアクションは特定の筋肉と関節の動作を制御する専門家です。したがって、当初は応答マシンと思われたものが、各「If」と「That」に各段階で多数のステップとプロセスが関与する大規模で複雑なシステムになりましたダウンストリーム方向とアップストリーム方向の両方での信号伝送。
初期の頃、最も一般的な見方は、視覚システムが「上」方向に機能し、最初にオブジェクトの低レベルの特徴を区別し、次に個々の画像と形状を単一の全体にまとめて、オブジェクト全体を認識できるようにすることでした。 しかし、近年では、より高いレベルでの期待が、より低いレベルでの情報の処理方法に影響を与えることが明らかになりました。
V.S. ラマチャンドラン: [知覚の古いモデルのほとんど]は、「チームチーム」の信用されていないモデルに基づいています。これは一貫した階層モデルであり、私たちの美的感覚を知覚の最後のレベルのみに帰します。 私の意見では...最終的な「Aha」までの視覚的セグメンテーションの各段階には、多くの小さな段階があります。 確かに、知覚の行為自体、オブジェクトのグループは、パズルの解像度と相関する場合があります。 言い換えれば、芸術は、認識の最終的な集大成への視覚的な前奏曲です。」 [8]
実際、脳内の視覚システムは、目だけでなく脳の他の部分からも大量の信号を受け取っていることがわかりました。
リチャード・グレゴリー: 「知覚の分野に対する蓄積された知識のこのような重要な貢献は、脳内の多数の下行経路の発見と一致しています。 神経線維の約80%が外側頭蓋核に降りて皮質から下降し、神経線維の20%だけが網膜からこの核に行きます。
おそらく、これらの信号は、可視領域にあるオブジェクトで検出できるオブジェクトの特徴を示しています。 したがって、自分がキッチンにいると考え始めるとすぐに、さまざまな物体を受け皿やカップとして認識する可能性が高くなります。
これはすべて、より高いレベルの脳が周囲の世界を一連の年齢スポットとして認識しないことを示唆しています。 このような高レベルの説明を使用しないと、Ifルールが実用的となることはほとんどありません。
したがって、Builderが感覚信号を使用するには、このデータが何を意味するのかを知る必要があったため、Builderで使用されるオブジェクトのアイデアを示しました。 次に、何かが長方形のブロックで作られていると仮定すると、これらのプログラムの1つは、そのシルエットだけに基づいて、どのブロックがスコープ内に現れるかを「決定」できます。 ビルダーは、同様の判断のおかげでそのようなことをすることができます。

プログラムが図のエッジの一部を決定するとすぐに、これらのエッジが属するブロックのさらに多くの部分を表すようになり、この知識を使用して、プログラムはさらに必要な値の検索を開始し、上記のサイクルを繰り返しました。 この段階では、プログラムはすでにそれをプログラムした研究者よりもはるかに優れていた[10]。
また、Builderには、コーナーとエッジという言葉の最も一般的な「概念」についての追加知識も与えました。 たとえば、プログラムがエッジを見つけた場合、
 彼女は、この地域が特定の人物に属することを示唆できたかもしれません。 次に、プログラムはこの図を見つけて、残りのエッジを決定しようとしました[11]。
彼女は、この地域が特定の人物に属することを示唆できたかもしれません。 次に、プログラムはこの図を見つけて、残りのエッジを決定しようとしました[11]。
低レベルのシステムは多数のフラグメントを考慮しますが、「コンテキスト」を使用してこれらのフラグメントの意味を判断し、中間レベルのプロセスを使用して推測を確認します。 言い換えれば、物事を「記憶」し、提示されたフラグメントと相関させることができるおなじみのオブジェクトと相関させることにより、物事を「認識」(再認識)します。 しかし、高レベルの期待が低レベルのシステムが私たちの周りの世界を認識する方法にどのように影響するかについては、まだ十分に知りません。 たとえば、下の中央の図が隣の図と同じ形をしているのを見てみませんか?

この問題の優れたレビューで、Zenon Pilishinはそのような現象を説明できるいくつかの理論を説明していますが、彼はまだ学ぶべきことがたくさんあると結論付けています[12]。
翻訳をありがとう、スタニスラフ・スハニツキー。 誰が翻訳を手伝いたいのか-個人のメールまたはメールに記入してくださいmagisterludi2016@yandex.ru
エモーションマシンの目次
著者について
マービンリーミンスキー(マービンリーミンスキー生まれ、1927年8月9日-2016年1月24日)は、人工知能の分野でアメリカの科学者であり、マサチューセッツ工科大学の人工知能研究所の共同設立者です。 [ ウィキペディア ]
興味深い事実:
- ミンスキーは、イェール大学の批評家ハロルド・ブルームと友達で、彼は彼を「ミンスキーの邪悪なマービン」にすぎないと言っていた。
- アイザック・アシモフは、ミンスキーを自分よりも賢い二人の一人と説明しました。 彼の意見では、2番目はカール・セーガンでした。
- マーヴィンは、銀河のヒッチハイカーのダグラスアダムスサイクルからの人工知能と、銀河への映画ヒッチハイクガイド(フィルム)を備えたロボットです。
- ミンスキーは、将来「復活する」ために、死後に脳を凍結する契約を結んでいます。
- ミンスキーに敬意を表して、犬は映画「トロン:レガシー」の主人公に指名されました。 [ ウィキペディア ]
#philtechについて 
#philtech(テクノロジー+慈善活動)は、相互作用とデータおよび知識へのアクセスのための透明なプラットフォームを作成することにより、できるだけ多くの人々の生活水準を調整するオープンで公開されたテクノロジーです。 そして、フィルテックの原則を満たす:
1.オープンで複製され、競争力のある所有権ではありません。
2.自己組織化と水平相互作用の原則に基づいて構築されています。
3.地元の利益を追求するのではなく、持続可能で展望に基づいたもの。
4.伝統や信念ではなく、[オープン]データに基づいて構築
5.非暴力的かつ非操作的。
6.包括的であり、あるグループの人々のために他のグループを犠牲にして働いていない。
ソーシャルテクノロジースタートアップのPhilTech Acceleratorは、情報、リソース、機会へのアクセスを平等にすることを目的とした初期段階のプロジェクトを集中的に開発するためのプログラムです。 2番目のストリーム:2018年3月– 6月。
電報でチャット
フィルテックプロジェクトを開発している、または単に社会部門のテクノロジーのトピックに興味がある人々のコミュニティ。
#philtechニュース
#philtechのイデオロギーのプロジェクトに関するニュースと有用な資料へのリンクを含む電報チャンネル。
週刊ニュースレターを購読する
#philtech(テクノロジー+慈善活動)は、相互作用とデータおよび知識へのアクセスのための透明なプラットフォームを作成することにより、できるだけ多くの人々の生活水準を調整するオープンで公開されたテクノロジーです。 そして、フィルテックの原則を満たす:
1.オープンで複製され、競争力のある所有権ではありません。
2.自己組織化と水平相互作用の原則に基づいて構築されています。
3.地元の利益を追求するのではなく、持続可能で展望に基づいたもの。
4.伝統や信念ではなく、[オープン]データに基づいて構築
5.非暴力的かつ非操作的。
6.包括的であり、あるグループの人々のために他のグループを犠牲にして働いていない。
ソーシャルテクノロジースタートアップのPhilTech Acceleratorは、情報、リソース、機会へのアクセスを平等にすることを目的とした初期段階のプロジェクトを集中的に開発するためのプログラムです。 2番目のストリーム:2018年3月– 6月。
電報でチャット
フィルテックプロジェクトを開発している、または単に社会部門のテクノロジーのトピックに興味がある人々のコミュニティ。
#philtechニュース
#philtechのイデオロギーのプロジェクトに関するニュースと有用な資料へのリンクを含む電報チャンネル。
週刊ニュースレターを購読する