入門:振り子角測定
そこで、 ブラシレスモーターのホールセンサーを扱ったので、なぜこれが必要であったかを示します。 最も単純な逆振り子でスタンドを作りました。これは、振り子の自由端のモーターで回転するフライホイールを使用して安定化されます。
私は制御理論を研究し、そのようなおもちゃをいくつか作りました。たとえば、トロリーでの逆スイングアームは次のとおりです。
このようなことを管理する分析は次の記事に任せます。今日の記事のトピックは振り子の角度の測定です。 最も簡単なオプションは、インクリメンタルエンコーダーをインストールすることです。これについては、既に詳細に検討しました 。
しかし、この記事では、それに取り付けられた加速度計を使用して振り子の位置を測定します。 最も安いadxl345を使用します。 それでは、ヒンジから距離rの振子に加速度計を取り付けた場合、角度をどのように決定するのでしょうか? Y軸が振り子に沿っており、X軸が振り子に直交するように加速度計を取り付けました。
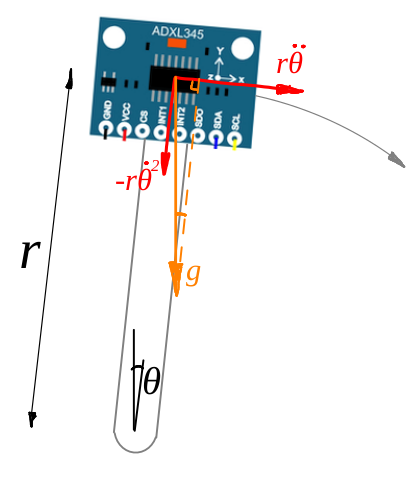
まず、振り子が動いていないと仮定しましょう。 その後、加速度計はその軸上に重力ベクトルの投影を生成します。 すべてが1つの平面で、理想的にはZ軸に沿って行われるため、加速度計の値はゼロになります。 つまり、加速度計の測定値は(x、y、z)=(g cosθ、-g sinθ、0)のようになります。 さて、角度はy / xのアークタンジェントを使用して取得できます。
加速度計が動き始めると、すべてが少し複雑になります:重力の加速に加えて、振り子の角加速度と対応する求心加速度も測定します。それらは図の赤い矢印で示されています。
加速度計を振り子に掛け、同時に制御のためにインクリメンタルエンコーダーを起動しました。これにより、加速度計の測定値を比較するための実際の角度が得られます。
したがって、加速度計の測定に最も単純なアークタンジェントを使用すると、次のようになります。
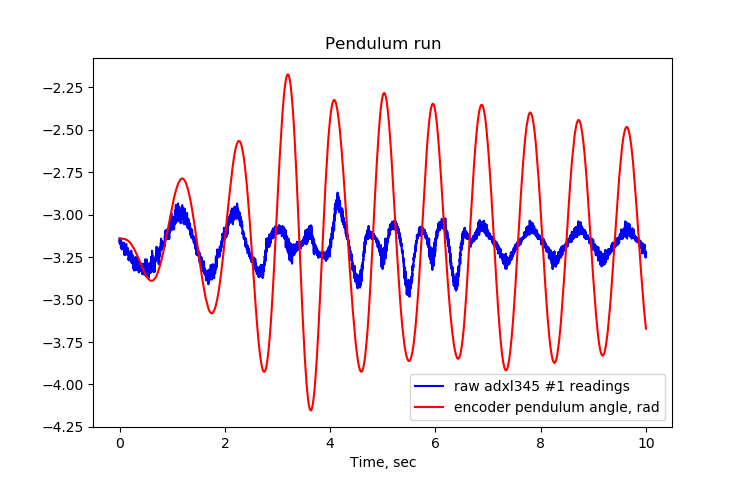
この図では、振り子が揺れています。現在の角度の変化は赤い曲線であり、青い曲線はy / xのアークタンジェントであり、加速度計の測定値でもあります。 曲線があまり一致しないことがはっきりとわかります。
次に、中心からr / 2の距離に2番目の加速度計を追加します。 2つの加速度計は、測定値(xa、ya)および(xb、yb)を提供します。これらは(理想的なケースでは)角度θおよび角速度/加速度に依存します。

原則として、すべてがかなり散文的ですが、なぜ私はそれをしたのですか? そして今、魔法、あなたの手を見てください! (xa、ya)-2 *(xb、yb)が何になるかを計算してみましょう:

振り子自体のダイナミクスはすべて失われ、重力加速度ベクトルの投影のみが残ります! つまり、2つの加速度計を使用して、振り子のダイナミクスを振り返ることなく振り子の角度を推定できます。

そして、これがリアルタイムの見積もりです:
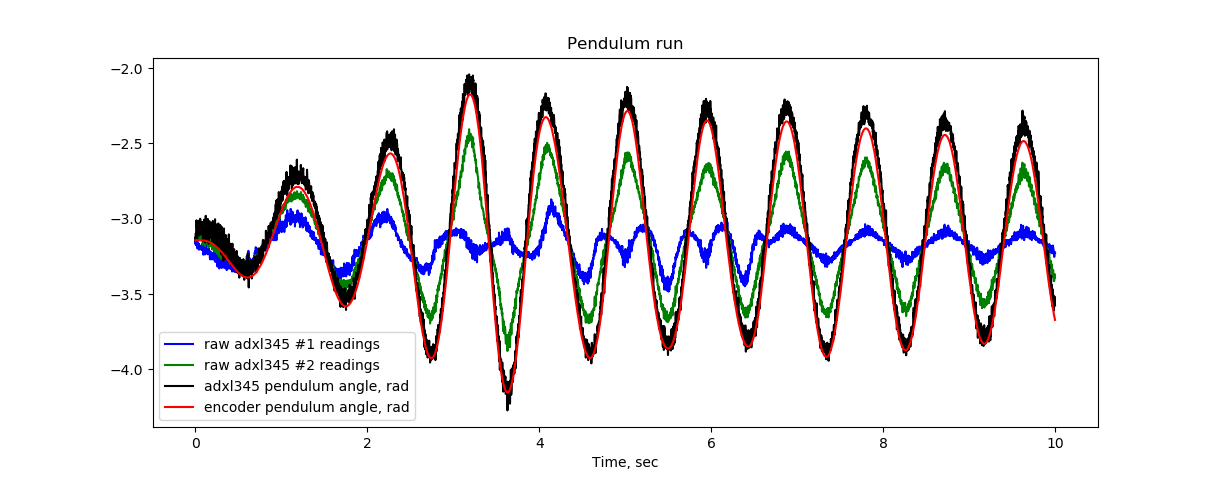
ここで、青と緑の曲線は加速度計からの生データであり、黒の曲線は計算された角度です。 これは、エンコーダから取得した基準曲線と非常によく一致します。 私はセンサーを調整しませんでした。すべてが「目で」ねじ込まれています。そこから、加速度計とエンコーダーからのデータにわずかな違いがあります。
これで話を終わらせることができましたが、私は料理用のスポンジ(そして4個のナッツ!)を約束しました。 今、彼らはなります。 このスケジュールは、最初のアプローチからはまったく得られませんでした。 最初から始めましょう。
加速度計の取り付け方法
最初は、加速度計を振り子にねじ込むだけで、データとして送られてくるゴミに不愉快な驚きを覚えました。 最初に受けた災害の規模を示しましょう。

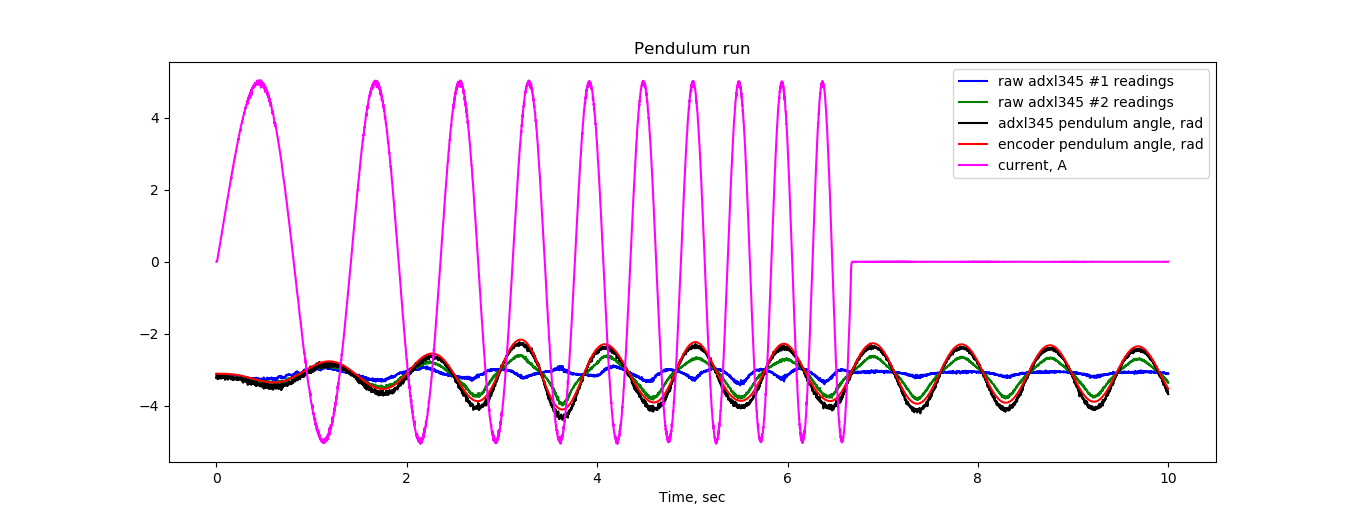
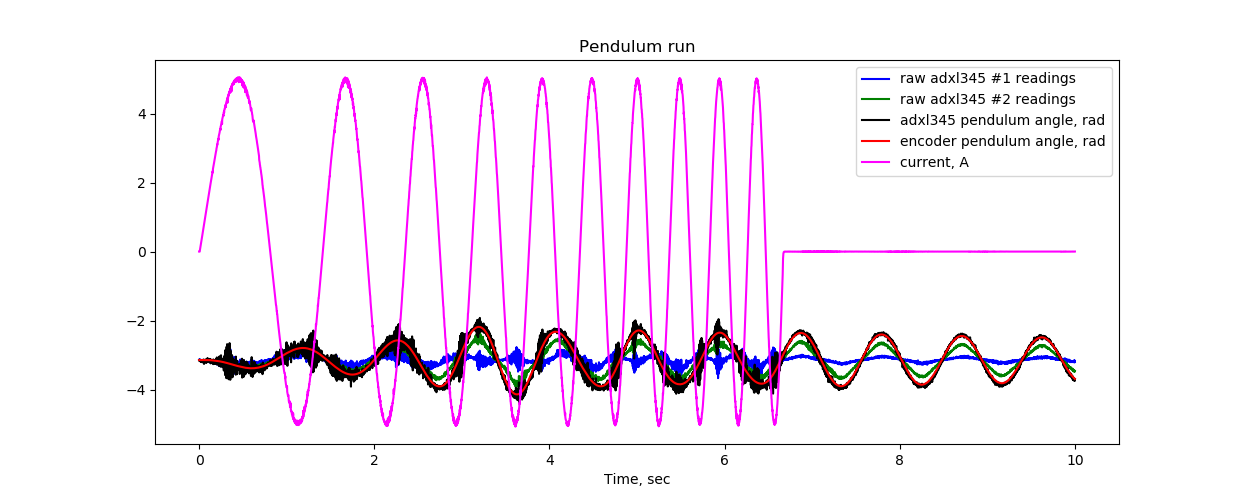
これは前のグラフと同じグラフですが、モーターの電流を示す別のピンクの曲線が追加され、フライホイールがポンプされます。 モーターが動作しているとき、加速度計は完全なナンセンスを出します。 しかし、モーターがオフになるとすぐに、すべてが魔法のように通常に戻ります...なぜですか?
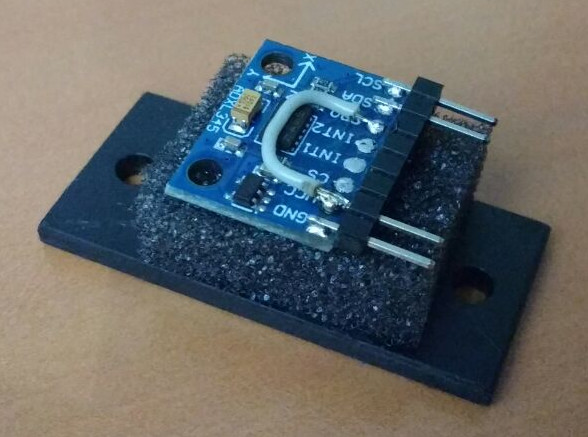
最初は電気導線に罪を犯しましたが、犯人はブラシレスモーターの動作中の高周波振動であることが判明しました。 それから、防振をすることにしました。 私はそのようなことをしたことは一度もありませんでした。 これが私の最初の防振の様子です。
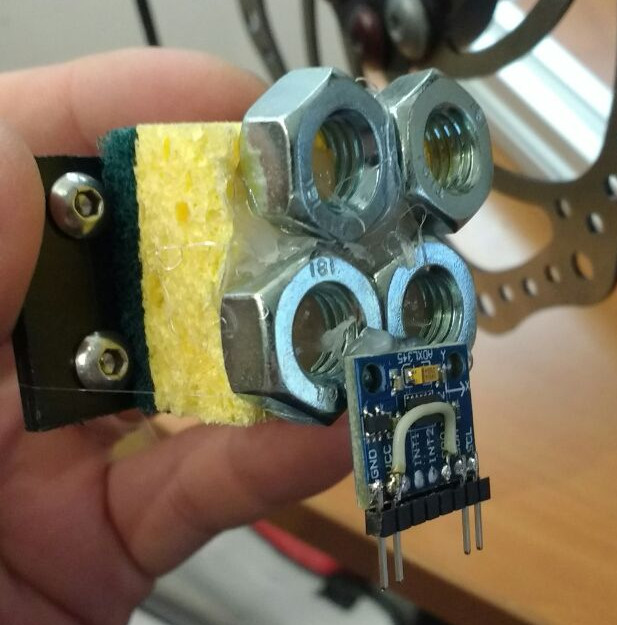
ナットは慣性振動ダンパーとして機能します。 最初のテスト、および状況は劇的に改善されました! ナットをスチールプレートに置き換えた2番目のバージョンを喜んでスコルホジルしました。

これはグラフがどのように見えるかです:
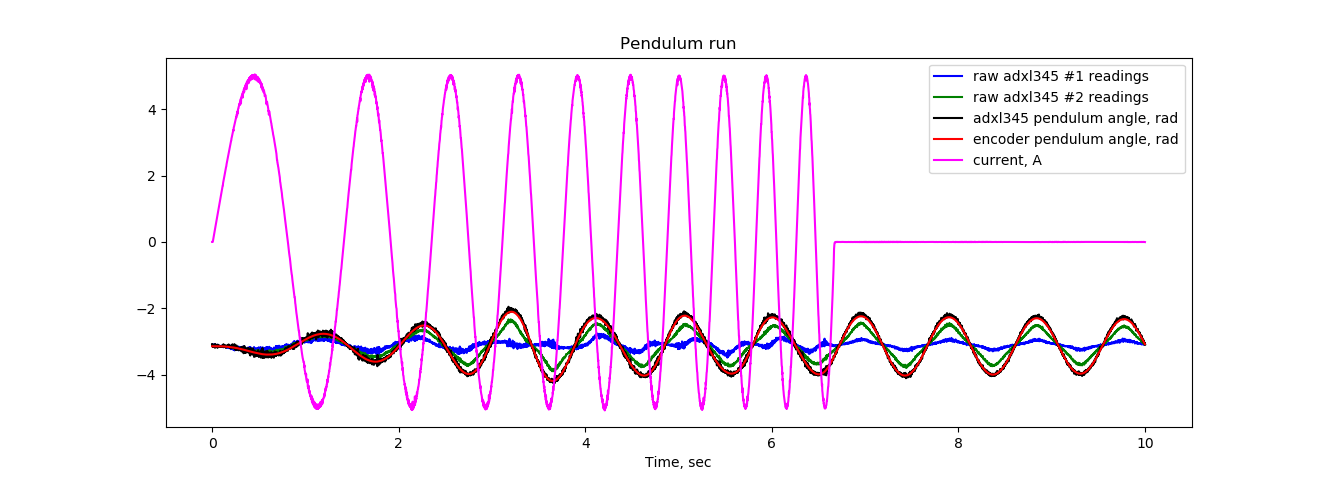
原則として、これは落ち着いていたかもしれませんが、スポンジの大きな厚さをつぶして、振り子の急速な動きにかなりの遅れをもたらしました。 だから私は別のキッチンスポンジで試しました:

ここに彼女のグラフがあります。違いは、青色のグラフの8分の1秒から10分の1の領域に見られます。
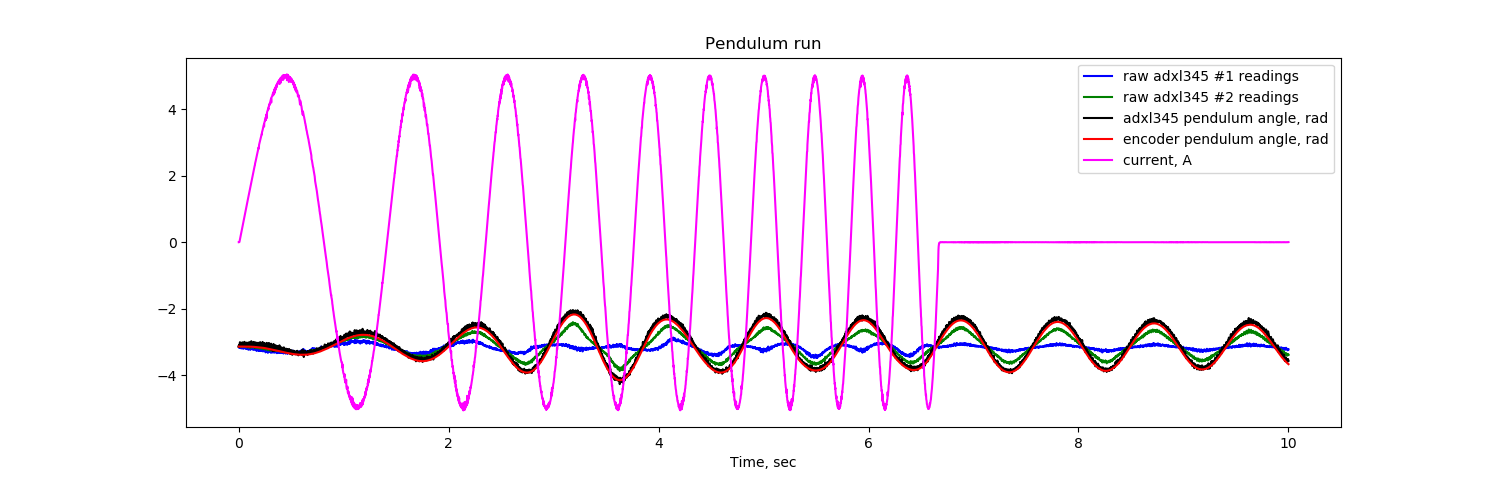
私はこれを落ち着かせましたが、新しいスポンジを取り、それが数日で乾いてしまい、十分に弾力性がなくなったことがわかりました。 グリセリンを滴下することもできますが、これは私たちの方法ではありません! したがって、キッチンスポンジを帯電防止フォームに置き換えました。

関連するグラフは次のとおりです。
そして、私はその考えに立ち会いました。なぜ私は質量を心配しているのですか、アクセルのスカーフを直接フォームに貼り付けることは可能ですか? 私は次の設定を試しました:
答え:いいえ、できません!
一般に、ローパスフィルターについて知りたいと思っていたが、尋ねるのは怖かった。 結論:振動絶縁は優れていますが、カットオフ周波数を正しく選択する必要があります。 誰かが材料、その厚さ、および対応する荷重を選択するより実験的な方法を提供できるなら、私は非常に感謝します!