だから、スマートフォン、タブレットコンピューター、GPSトラッカー、カーナビゲーター、さらには車内のコンピューターさえも、無数のモバイルデバイスに囲まれていることを想像しても問題はないと思います。 通常
このようなデバイスは、グローバル衛星ナビゲーションシステム(GPS、GLONASS、Baidu)の統合受信機です。 これらの受信機は非常に予算がかかり、高価なプロ仕様の機器とは異なり、補正補正を受信してセンチメートルの精度でデバイスの位置を特定できる差動モードをサポートしていません。 残念ながら、座標を決定する精度には、多くの要望が残されています。
しかし、テクノロジーの核心に取りかかる前に、位置決めエラーの原因を思い出してみましょう。 実際の条件では、多くの要因がデバイスの座標を決定する精度に影響します。 ただし、計算エラーの発生源はすべて、発生源に応じて次のグループに分類できます。
- コントロールおよび測定コンプレックスによって導入されました。 これには、航法衛星のタイムスケールのわずかな不一致によるエラーと、すべての消費者への無線信号の放射時の実際の軌道に対する位置の不正確な計算によるエラーが含まれます。
- 航法衛星自体の設備によって導入されました 。
- 無線信号の伝播から生じる 。 ここでの主な原因は、地球の対流圏と電離層に存在する不均一性による電波信号の屈折です。これにより、信号伝搬に追加の遅延が生じます。
- コンシューマーレシーバーによって導入されます(デバイスの内部「ノイズ」)。
- 信号の伝播におけるマルチパス (地球および周囲の建物の表面からの反射)。
そして今、キーポイントに注意を払うようにお願いします。これは、以下に説明する方法の本質的な理論的正当化です- エラーソースの最初の3つのグループは、互いに比較的近い距離にあるデバイスに共通しています(つまり、相関しています)。 デバイスの内部ノイズとマルチパス信号の伝播に関連するエラーのみが個別のものです。 ちなみに、このアイデアは差動サブシステムの動作の根底にあります。 いわゆるエラーの時空間相関の領域では、任意のポイントで計算されたエラーパラメータを相関時間中に使用して、領域内の他のポイントでの測定値を修正できます。
単一の時空間ドメインとそうでないものをより明確にするために、例を挙げます。 モスクワのレニングラードスキープロスペクトとEntuziastov Highwayに同時に位置する消費者は、ナビゲーションフィールド、つまり空の衛星の構成と位置、および電離層と対流圏の状態がほぼ同じになるため、それらの距離はほぼ同じになります。衛星までの距離が短く、電離層の不均一性のサイズが小さい。 また、測位誤差は対流圏と電離層の異なるセクションに依存するため、モスクワとカザンの消費者は異なる時空間領域に位置します。 また、1か所にいて、1時間または2時間の間隔で測定を行う場合でも、測定は異なる領域に対応します。この時間中に電離層と対流圏だけでなく、ナビゲーションフィールド自体も変化するためです。 差動サブシステムのさまざまなバリアントでは、そのような領域の典型的な空間寸法は数単位から数百キロメートルに及ぶことに注意してください。
メソッドの理論的な正当性を簡単に確認した後、単一の時空領域に配置された「単純な」デバイスの数が各デバイスの位置決めの精度の向上に役立つという仮説の説明に戻りましょう。
衛星ナビゲーションシステムの受信機が取り付けられた2つの路面電車(条件付きで43および56の路線がある)を見てみましょう。 所定の瞬間にトラム43が南から北に移動し、トラム56が西から東に移動するようにします。 同時に、またはわずかな時間差で、路面電車の現在の位置に関する座標のマークが到着します。 しかし、差動サブシステムはデバイスで使用されていないため、決定の精度は正確な位置決めには不十分です。どちらの場合も、マークは路面電車のレールの外側に配置される可能性があります。
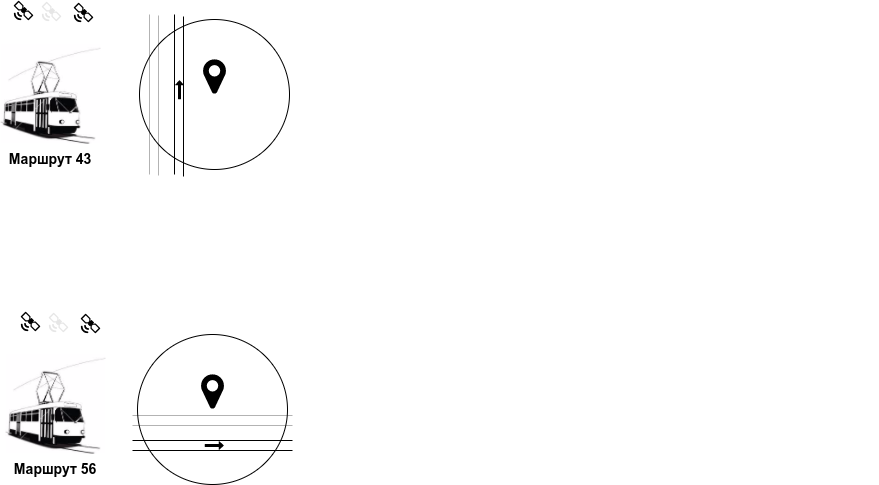
しかし、その後、受信機は、物理的位置が空間内の実際の位置に課される路面電車に乗っていることがわかります。 実際、路面電車の位置の変動性はレールの位置によって決まります。ルート43の路面電車の実際の位置は観測マークの西にあり、路面電車56は南にあります。 そして、両方の場合の位置を計算する手順で同じ航法衛星(いわゆる作動星座)が使用された幸運な状況を想像してみましょう。 そして簡単にするために、決定の精度は同じであると仮定します-描かれた円の半径は一致します。 これらの円を1つに精神的に組み合わせて、2つのパスの交差点で仮想ポイントを見つけましょう。 求められている役割の潜在的な候補となるのはこの点です。この場合、観測点から路面電車の実際の位置までの補正ベクトルは同じになります。

この補正ベクトルをマークに適用すると、最初の路面と比較してより正確に両方の路面電車の位置を簡単に計算できます。 もちろん、無線信号の反射や受信機のエラーに関連する測定エラーは残ります。
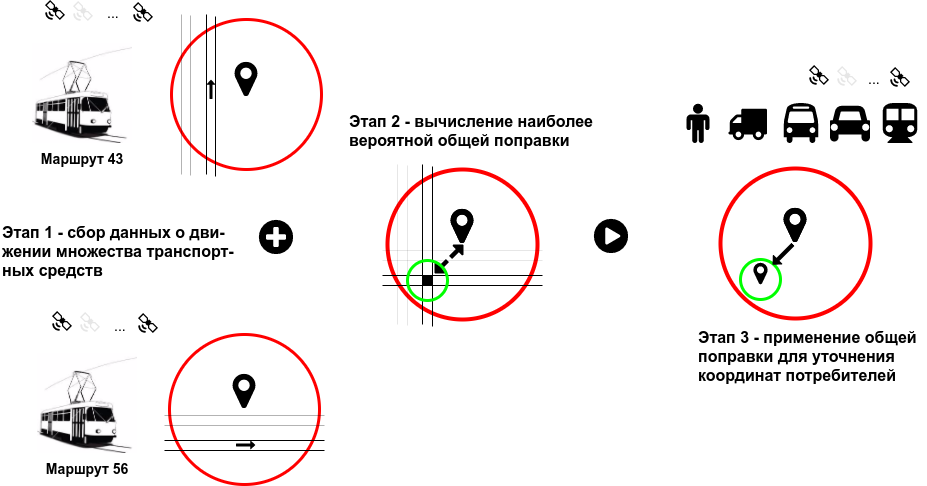
それでは、2つの路面電車ではなく、数十、数十万、さらには数百万の路面電車に乗りましょう。 路面電車だけでなく、ナビゲーターやERA-GLONASSデバイスを搭載した道路を走行するあらゆる種類の車両。 そして、これが私が伝えたいと思う次の考えです。これは、道路上の車は95%のトラムです。 集合体のすべての車が道路に沿ってランダムに移動しないという意味で。 まっすぐな道路の車の流れを注意深く見ると、ほとんどの場合、車は見えないレールに縛られているかのように車線を走っています。 再構築、追い越し、その他の操作に費やす時間はごくわずかです。 さらに、歩行者とは異なり、車両の実際の位置は比較的狭いスペースに制限されています。車道は、大都市の総面積が総領土の1〜5%を超えません。 時速20〜30キロメートルを超える速度で動いている車は、車道の外側(歩道、芝生、または野原など)で突然自分自身を見つけ出すことはできず、同じ速度またはそれ以上の速度で動き続けます。 また、分割フェンスがある道路では、対向車線を離れる可能性は無視できます。
したがって、「許可された」エリアの外側の衛星ナビゲーションシステムを使用して記録された車両の座標、つまり道路インフラストラクチャの既存の要素と矛盾するものは、オブジェクトの実際の位置の方向でこれらの測定値を補正する補正を計算するときに、良い情報信号であると想定できます。 ただし、すべての観測が役立つわけではありません。 たとえば、モスクワ環状道路沿いの中央車線を移動する車のマークには、半径5〜6メートル内のすべての潜在的なポイントが非常に許容されるため、ほとんど情報が含まれていません(車は実際に隣接する車線に行くか、車線を変更することができます)。 一方、単一車線の林道の車マークは、より多くの情報を提供します。
通常の大規模な紙カードと透明な紙を使用して、この方法の本質をより明確に理解できます。 地図に透明度を暗記し、観測に対応するように車両にマークを付けます。 マークが多いほど良い。 次に、異なるオフセット値で透明度を左右および上下に移動して、ポイントの最大数が道路の「自分の」セクションに収まるようにする必要があります(対向車線、縁石などにありませんでした)。 この方法で最適化の問題を解くと、これらの車の最も可能性の高い実際の位置を見つけると同時に、そのような骨の折れる作業の後のマークが「禁止」エリアに落ちた人の中から潜在的な違反者を特定します。
これが私たちの方法の本質です-コンピューター計算を使用して、追加の高価な機器を使用せずに、1つの時空領域から多数の観測値を分析し、各観測値から必要な情報を抽出し、マークを「マップ」と比較して、一般的な補正補正を計算しますこの領域のすべてのデバイスに使用できます。
一般的な修正修正を計算するには、道路網のできるだけ多くのセクションの最も詳細なデジタルマーキングを使用する必要があります。これにより、消費者の実際の状況をより正確にローカライズできます。 そして、車両自体のドライバーだけでなく、潜在的なタクシーの顧客を含む「馬のない」歩行者ももちろんです。 もちろん、歩行者用デバイスは、矯正補正の分析と計算から除外する必要がありますが、計算された補正は、運転者と同じ足場でそれらに適用できます。
しかし、デジタルマークアップとは何ですか? 私たちは、さまざまな種類のナビゲーションの問題を解決するために必要かつ十分な精度で、空間内の道路インフラストラクチャのいくつかの要素の実際の位置を記述する数学モデルとして定義しています。 そのような道路インフラストラクチャの要素には、縁石、分割車線、道路標示、路面電車などが含まれます。 簡単に言うと、デジタルマーキングは、座標(緯度と経度)に応じて、このポイントが何に対応するか、道路の他の要素からどれだけ離れているかを示す必要があります。 たとえば、縁石にどのくらい近いか、近づいてくる車線や歩行者の歩道に属しているかなどです。
デジタルマークアップをより正確に作成できるほど、予測をより正確に行うことができるようです。 残念ながら、正確なデジタルマークアップを作成することは非常に困難で費用のかかる作業です。 ただし、その存在は無人車両の開発にとって重要であるため、遅かれ早かれその外観が避けられなくなることを願っています。 上記のテクノロジーの作成の一環として、共同観測の同じ原理に基づいて、この問題を解決することを目的としたアプローチを研究および調査しますが、これは少し異なる話です...