
こんにちは、Habr! 今日、私たちは不整脈の原因がどのように発見され中和されるかを知るために、人体のまさに中心への刺激的な旅に行くことを申し上げます。
生理学
操作自体とその実装方法について説明する前に、生理学を理解する必要があります。 心臓には自動機能があります。 電気インパルスを独立して生成できます。 洞結節の細胞と心房と心室の伝導システムだけが自動化の機能を持っています。 心臓には伝導機能もあります。これは興奮を伝導する能力です。 電気インパルスの生成とその伝導により、心臓が収縮します。 通常、唯一のペースメーカーは洞結節であり、他の病原体の自動活動を抑制します。 このノードは、右心房の壁にあります。 下の図は、励起の正規分布を示しています。
操作を開始する
さまざまな理由で、一部の心臓細胞はリズムを強制できます。 この場合、心臓の周波数、興奮のシーケンス、および収縮の違反があります。 これは不整脈の一種です。 その結果、多くの深刻な合併症が発生する可能性があります。 ただし、侵入者の細胞は、いわゆるカテーテルアブレーションの助けを借りて中和することができます。 これは低侵襲的介入であり、その間に特別なカテーテルが心腔に挿入されます。
使用されるカテーテルは、最後にいくつかの電極(極)を備えた細い柔軟なチューブです。 極は、心臓の内外からの衝動を伝えることができます。 カテーテルの形状と極数は異なります。
カテーテルは、arm径部、腕、肩、または首に挿入できます。 場所は、心臓のどの部分を手術する予定かによって異なります。 手術には局所麻酔で十分です。 皮膚に小さな切開を施し、血管を針で刺します。 次に、1つ以上のカテーテルを切開部に挿入します。 カテーテルは、血管を通って希望の心腔に運ばれます。
心臓病専門医が手術前に問題のある部位の位置を特定できる場合、不整脈の種類があります。 しかし、これは常に可能とは限りません。 このような場合、操作は技術的に複雑で時間がかかります。 特別なサポートがなければ、ほとんどの場合、医師は「盲目的に」行動しなければなりません。 通常、医師はX線装置を使用してナビゲートします。 しかし、このアプローチでは、平らな画像しか見ることができず、カテーテルの空間的位置を理解することはできません。 さらに、患者とスタッフは放射線にさらされています。
現代のテクノロジーを使用して、タスクを単純化し、望ましくないソースを見つける方法を考えてみましょう。 例として、不整脈のタイプの1つ、心室期外収縮を取り上げましょう。
ポジショニング
ナビゲーションから始めましょう。 プログラムでカテーテルの位置を計算するオプションがあります。 ここで、電極間の電位差の測定に基づいた方法について説明します。 このアプローチの主な利点は、標準のカテーテルを使用できることです。
最大限の精度を確保するには、少なくとも2つのカテーテルが必要です。 最初のカテーテルで、すべての計算が実行されるサポートポールが選択されます。 そのような極を冠状静脈洞(右心房に流れる血管)に配置する方が便利であることがわかった。 第一に、このポイントは、心臓の仕事中の移動性が最も低く、ナビゲーションエラーを最小限に抑えます。 第二に、この時点から、心臓のあらゆる部分からの衝動をキャッチできます。これは、マップを作成するときに重要になります。 操作中、支柱の位置は変わらないはずです。 2番目のカテーテルはマッピングと呼ばれます。 心臓の空洞内を移動し、リズム障害を見つけるために使用されるのはこのカテーテルです。 患者の体の表面の基準に対する位置を決定するために、3組の電極が取り付けられています。 1つのペアの電極は体の異なる側にあり、ペアは相互に直交しています(胸部-背中、左-右側、首-太もも)。 一対の電極間に、交流電流が導入されます。 周波数の重複を避けるために、ペアごとに個別の周波数が設定されます。

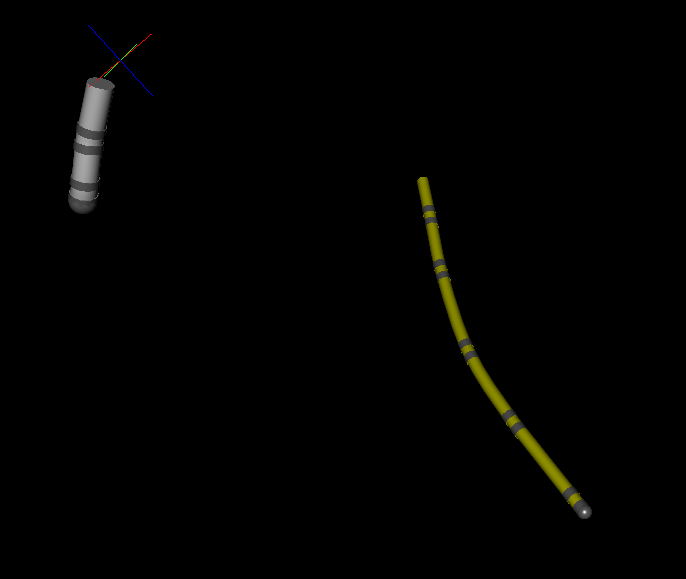
手術中、マッピングカテーテルの極と基準との間の電位差が計算されます。 さらに、3つの直交軸に沿って電位差を取得します。 心臓では、電位の変化は電流源からカテーテルまでの距離に直線的に依存します。 これにより、ボルトに特定の係数を掛けて、ミリメートル単位の座標を決定できます。 したがって、魔法なしで、従来の電極の相対位置を決定することが可能です。 画像では、灰色はマッピングカテーテル、黄色は参照カテーテルです。
心臓モデルの構築
一方、外科医の基準点に対するカテーテルの動きは重要な情報を伝えません。 しかし、これにより、心臓の3Dモデルを構築することが可能になりました。 表面メッシュを構築する前に、プログラムは再構築領域を定義します。 これは、操作された心臓が位置する領域です。 これを行うには、マッピングカテーテルを心臓の中心に配置します。 再構成領域のサイズを示すことも必要です。 通常、マッピングには半径10 cmで十分です。 次に、結果のキューブは、指定されたサイズのボクセルに分割されます。 ボクセルは、3次元画像の要素であり、ピクセルの一種の3次元類似体です。 各ボクセルには特定の値が含まれる場合があります。 この場合、値として0と1が使用され、値0はボクセルが心臓の外側にあることを示します。 1-値が設定され、ボクセルはモデル内にあります。 最初は、すべてのボクセルがインストールされていません。
初期データが示されたら、心臓のモデルの構築を開始できます。 カテーテルを動かすと、その座標がボクセルの座標と比較されます。 ボクセルの座標がカテーテルの座標と一致する場合、このボクセルは1に設定されます。モデルの構築中、医師はカテーテルを徐々に心臓の壁に運びます。 したがって、手術部門の空洞全体のボクセルモデルが徐々に構築されます。

私たちは主に内面に興味を持っています。 これを行うには、ボクセルモデルに基づいて、 マーチングキューブアルゴリズムを使用してグリッドを構築します 。 このアルゴリズムの本質は、ボクセルごとに、隣接するボクセルに基づいて、表面の特定の部分が指定されることです。 結果は、ボクセルモデルを「覆う」閉じた表面になります。
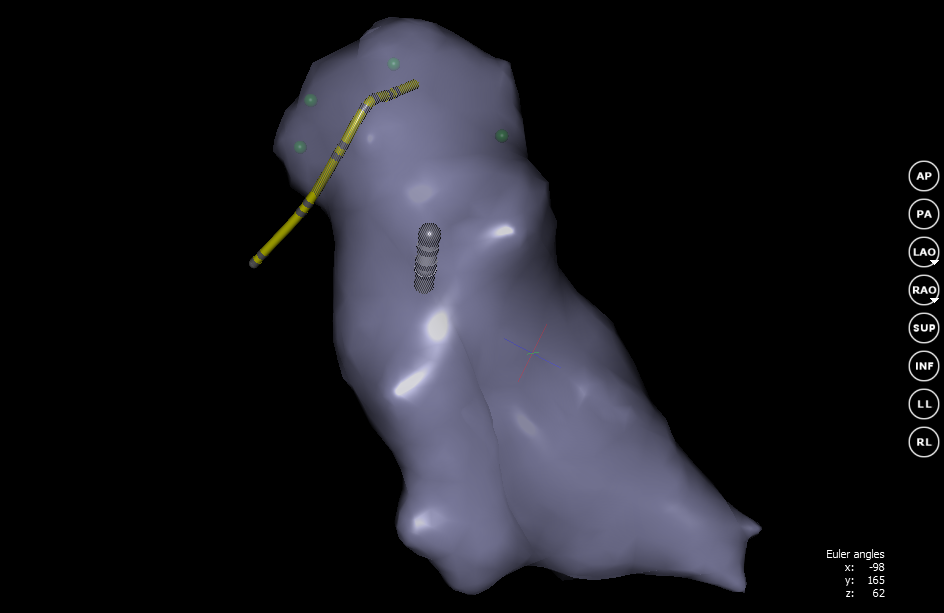
メッシュの再構築は、ボクセルモデルを変更するプロセスで常に発生します。 画面には、ボクセルモデルのないサーフェスがすぐに表示されます。 グリッドの準備が完了すると、3Dモデル作成モードがオフになります。 カテーテルの位置をさらに変更しても、メッシュの形状には影響しません。
私たちの場合、実際の画像によりよく一致させるために、グリッドの一部を切り取り、それによって右心房の弁を指定することができます。
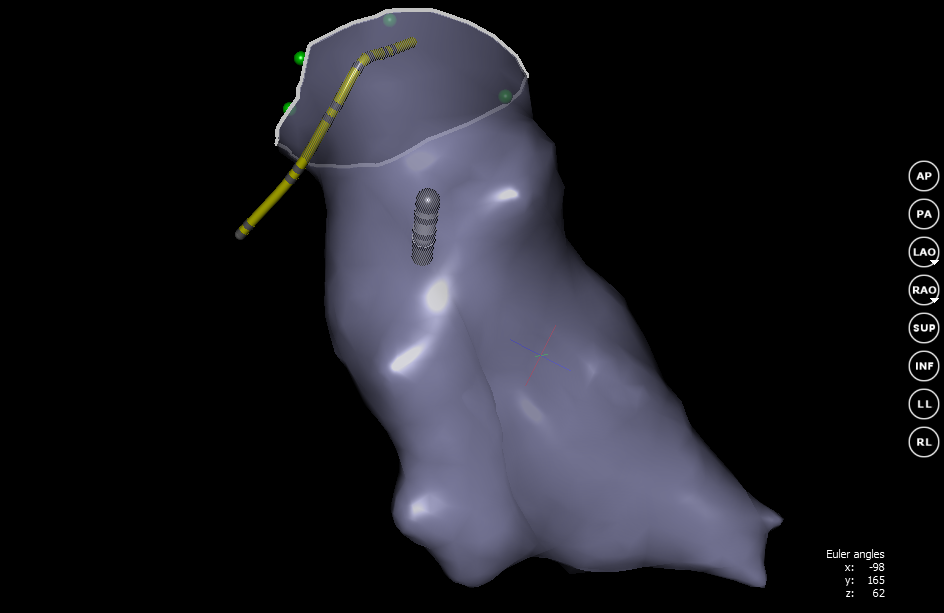
結果は、目的の部門の内面です。 今、医師は心臓の壁に対するカテーテルの動きを確認します。 これにより、カテーテルの制御がはるかに容易になり、リズム違反者の検索を開始できます。
地図作成
次の段階は、心筋を介した興奮の広がりの研究です。 接続されたカテーテルと標準リードからの手術全体の間、ECGが同じタイムラインで記録されることは注目に値します。
研究は次のとおりです。 医師はマッピングカテーテルを心臓の壁に運び、データを取得します。 主な指標の1つは、この時点でのアクティブ化(励起)時間です。 励起の瞬間は、マッピングカテーテルの極からの心電図から決定できます。 活性化中、ECGには歯があります。 スケジュール上のアクティベーションの瞬間は、医師が手動で設定するか、自動的に決定することができます。
次に、遅延時間が計算されます。 これは、テストポイントでのアクティベーションとリードの1つで記録されたアクティベーションの時間差です。 これらのリードは、支持カテーテルの極または胸部リードのいずれかです。 ここでは、標準のリードIIIを使用します。 したがって、特定のポイントでの興奮の瞬間を、心臓全体の興奮の平均値と比較します。 以下の例では、赤い点はリードIIIからの活性化の瞬間を示し、緑はマッピングカテーテルからの活性化の瞬間を示します。

心臓専門医は、自分の裁量で、どのデータを考慮すべきか、どのデータを考慮すべきでないかを決定する場合があります。 これが重要な理由を見てみましょう。 検討中の不整脈のタイプについては、不必要な興奮の原因が特定の間隔で現れることがあります(多くの場合不安定です)。 心臓の異常な収縮の間隔では、励起パルスが通常の方法で伝播し、標準リードからのECGは通常の外観を持ちます。 正常な覚醒の広がりは十分に研究されており、手術中には興味がありません。 医師は、リズム違反者の興奮の広がりに興味を持っています。 標準リードからのECGにより、不要なインパルス(期外収縮)の発生を判断することが可能です。 この時点での心電図は、標準形からの逸脱を持っています。 これは、心臓の表面から測定値を取得する時間です。
手術中に期外収縮がまれにしか現れないこともあります。 そのような場合、外科医はカテーテルから送信される電気的インパルスを使用して不整脈を人工的に引き起こすことができます。 手術室の専門家の管理下で、このような刺激は非常に安全です。
関心のあるデータが得られた場合、医師は結果を記録し、保存します。 心臓の3Dモデルでは、カテーテルが配置された場所にポイントが設定されます。 これで、新しいポイントの学習を開始できます。 そのため、カテーテルをある点から別の点に交互に移動すると、マッピングされたセクションの内面から測定値が取得されます。 一般に、複雑な場合には数十から数百ポイントかかります。 補間を使用した遅延時間に基づいて、心筋活性化の等時性マップが構築されます。
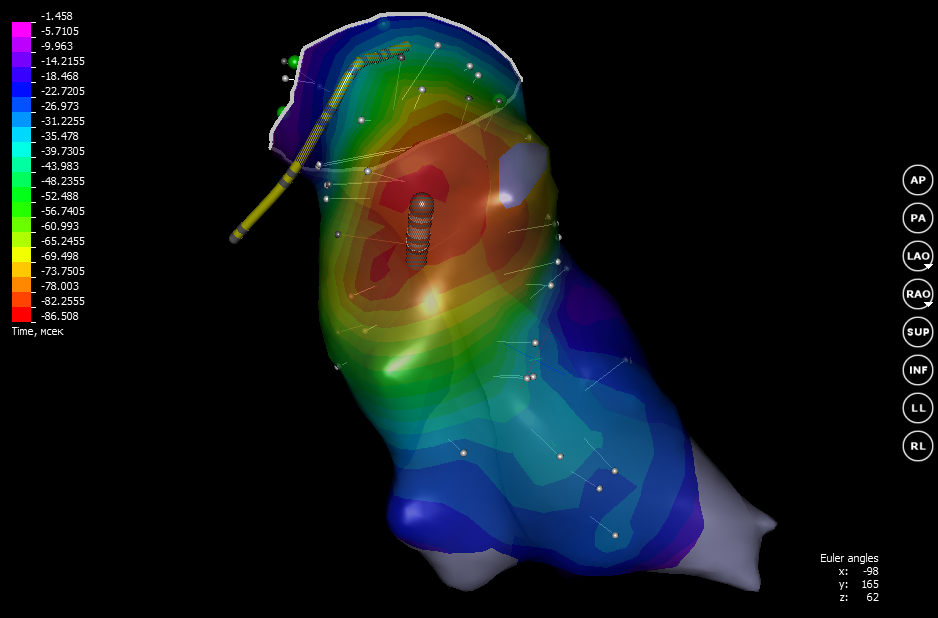
そのようなカードでは、色はアクティベーション時間を示します。 興奮は赤から紫に広がります。 等時性マップはわずかに異なる形式で表示できます。画像全体ではなく、特定の時点でのみ励起の分布を表示します。 このようなカードはアクティベーションカードと呼ばれます。
不要なソースを排除
このように構築されたマップでは、心筋に沿った興奮の伝播、そして最も重要なことに、興奮の原因がはっきりと見えます。 その結果、医師は不整脈を解消するために行動する必要がある場所を正確に知っています。 不整脈誘発ゾーンの中和プロセスは次のとおりです。
- 医師は、構築されたマップに依存して、カテーテルの極を心臓のポイントに押し付け、不要なインパルスを生成します
- カテーテルを通して高周波電流が供給されます。 電気エネルギーは熱に変換されます。 極の導電性が高いため、加熱されるのは極自体ではなく、この電極を囲む組織です。 加熱は摂氏45度に調整されます。 その結果、病理学的経路が通る心臓組織の小さな部分が破壊されます。 重要:手術を行うカテーテルには温度センサーが必要です。 これは、高温では心臓細胞に重大な損傷を引き起こす可能性があるため、常に熱を監視する必要があるという事実によるものです。
- 不要な病変がすべて除去された後、手術の有効性を評価するために、パルス伝播測定が再度実行されます。
結論の代わりに
長所と短所でナビゲーションをプログラムする方法は他にもあります。 そのため、たとえば、磁場に基づいた位置決めの精度は高くなりますが、そのようなシステムには特別な高価なカテーテルが必要です。
この記事では、操作の基本例を簡単な形式で示しました。 1つの記事のフレームワークでは、すべての詳細と操作の種類を説明することは不可能です。
ご清聴ありがとうございました!