タスク:普通の中国製ブラシレスコレクターがあります。CopleyControls 503コントローラーに接続する必要があります。安価なヘリコプターコントローラーとは異なり、503rdはエンジンにないホールセンサーからの信号を必要とします。 センサーの目的と配置方法を理解しましょう。
Likbez:ブラシレスモーターの動作原理
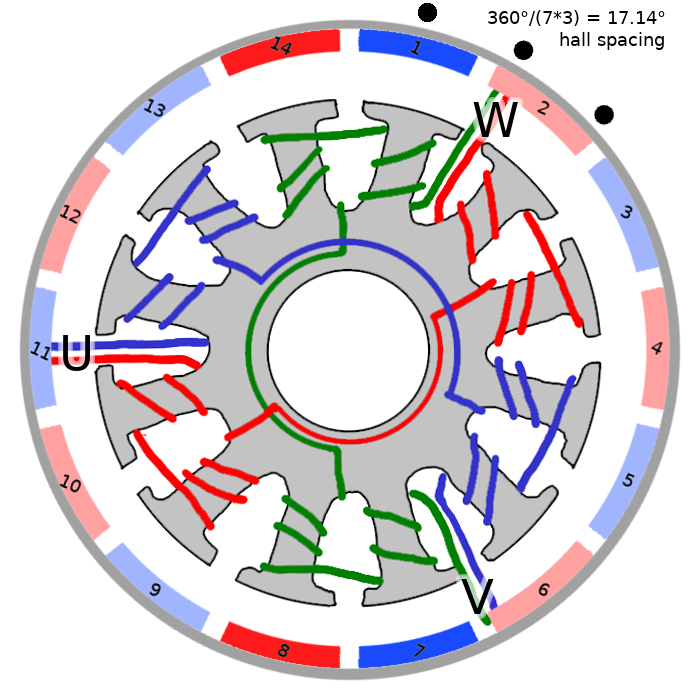
例として、固定子に12個のコイルがあり、回転子に14個の磁石がある非常に一般的なモーターを取り上げます。 巻線とコイル/磁石の数には多くのオプションがありますが、本質は常に同じです。 両側からコピーした写真を次に示します。ローターのコイルと磁石は完全に見えます。

さらに明確にするために、彼の図を描きました。回転子の磁石の極は色で示され、北は赤、南は青です。
これまでホールセンサーに注意を払わないでください、まだそこにありません:)
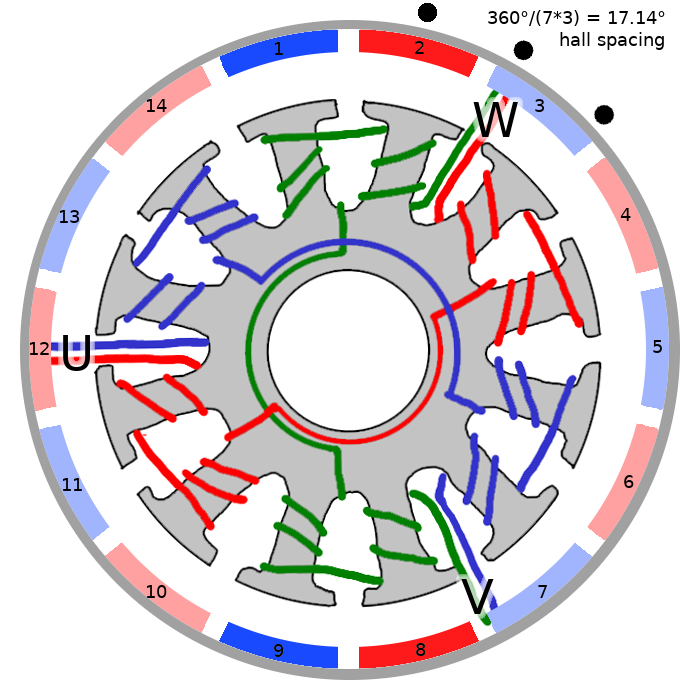
ピンVにプラス、ピンWにマイナスを与えるとどうなりますか(ピンUは何にも接続されていません)。 明らかに、電流は緑のワイヤで巻かれたコイルに流れます。 コイルは異なる方向に巻かれているため、上の2つのコイルは磁石1と2に引き寄せられ、下の2つのコイルは磁石8と9に引き付けられます。残りのコイルと磁石は、この構成では実際には役割を果たさないため、磁石1、2、8および9.このようなモーターへの電力供給では、明らかに回転せず、全周にわたって均等に分布する7つの安定したローター位置を持ちます(左上の緑色のステーターコイルは磁石1、3、5、7、9、11、13を引き付けます)。
ここでそのようなプレートにアクションを記述しましょう。
| ローター角 | うん | V | W |
| 0° | nc | + | - |
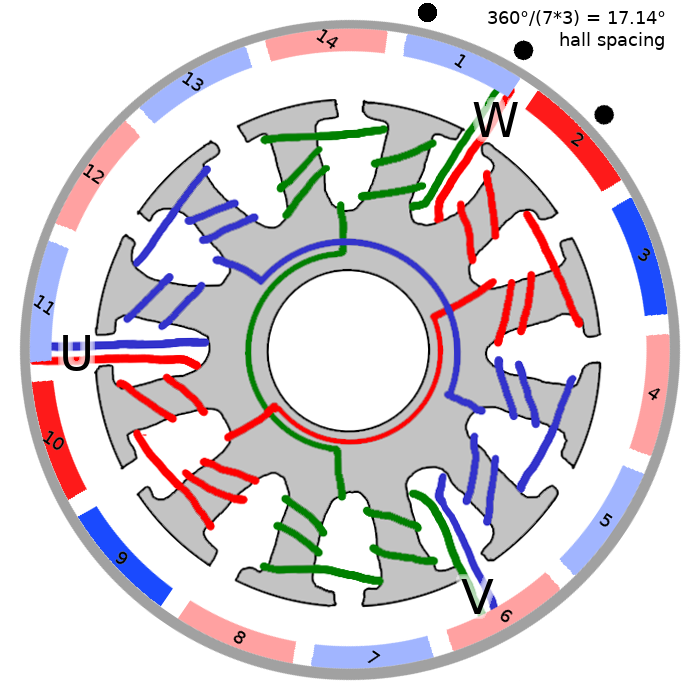
しかし、Uにプラスを、Wにマイナスを適用するとどうなりますか? 赤いコイルは磁石3,4,10および11を引き付け、ローターをわずかに回転させます(ローターが引く磁石を強調表示します)。
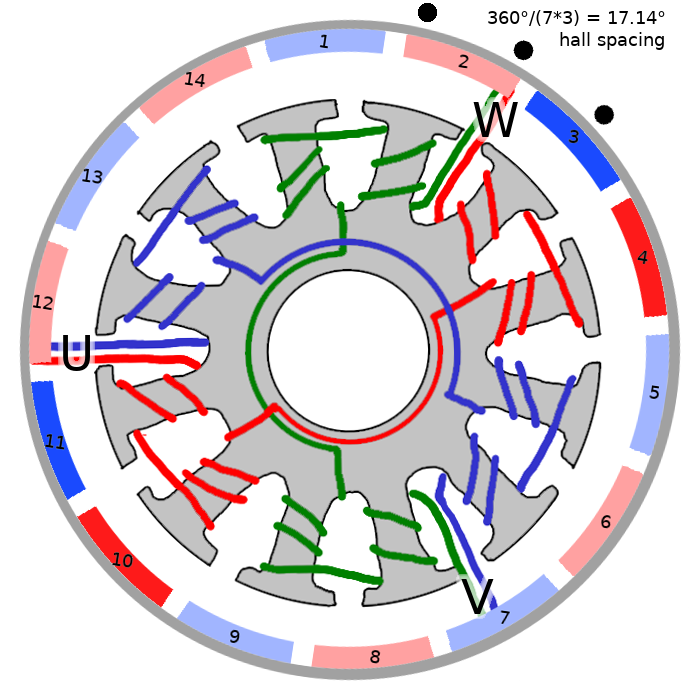
ローターがどれだけ回転するかを計算してみましょう:磁石1-2と3-4のスロット間は51.43°(= 360°* 2/7)で、ステーターの対応するスロット間は60°(= 360°/ 12 * 2)です。 したがって、ローターは8.57°で回転します。 ネームプレートを更新します。
| ローター角 | うん | V | W |
| 8.57° | + | nc | - |
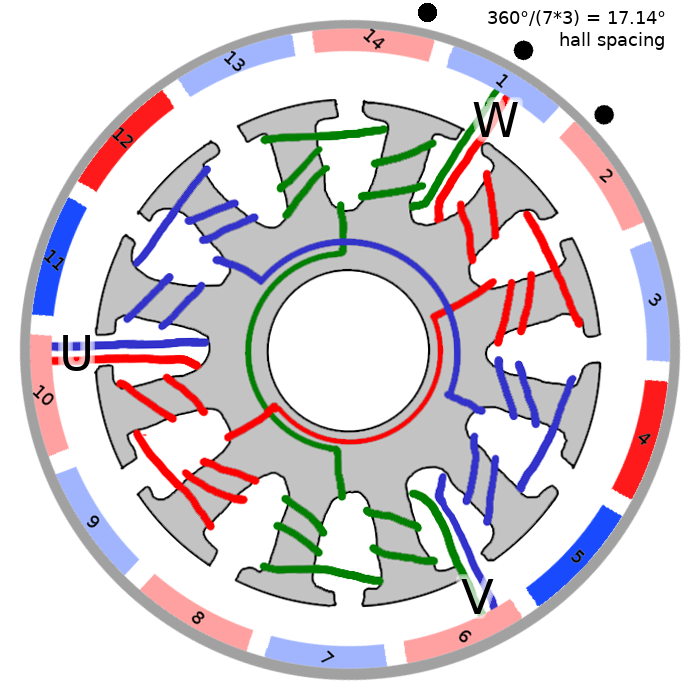
今、神自身がUに+とVに提出するよう命じました!
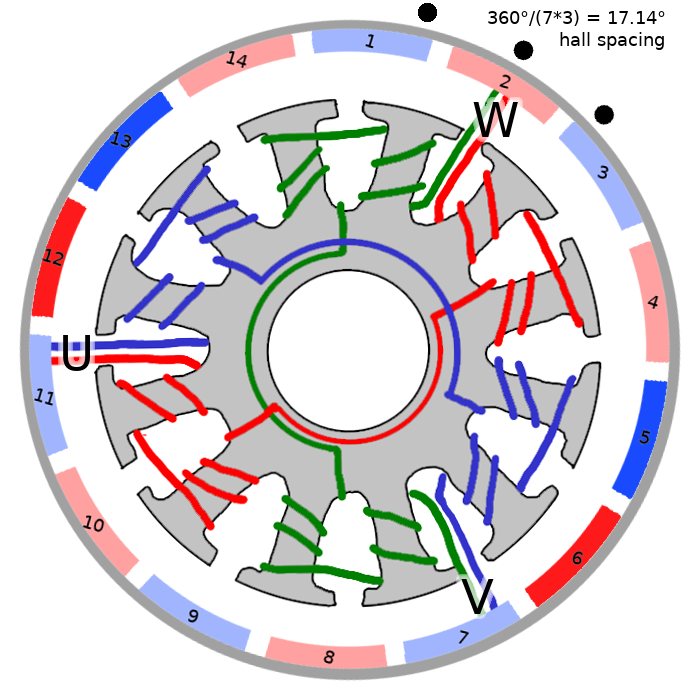
| ローター角 | うん | V | W |
| 17.14° | + | - | nc |
磁石を緑のコイルに揃える時間になりましたので、電圧を印加しますが、赤と青の磁石の位置が入れ替わったので、逆電圧を印加する必要があります。
| ローター角 | うん | V | W |
| 25.71° | nc | - | + |
残りの2つの構成では、すべてがまったく同じです。
| ローター角 | うん | V | W |
| 34.29° | - | nc | + |
| ローター角 | うん | V | W |
| 42.85° | - | + | nc |
最初のステップをもう一度繰り返すと、ローターはちょうど7回転します。 したがって、合計で、モーターには3つの出力があり、6つの異なる方法6 = 2 * C 2 3でそれらの2つに電圧を印加できます。 電圧がランダムではなく、厳密な順序で印加されると、ローターの位置に応じて、エンジンが回転します。
エンジンのシーケンス全体をもう一度書きましょう。
| ローター角 | うん | V | W |
| 0° | nc | + | - |
| 8.57° | + | nc | - |
| 17.14° | + | - | nc |
| 25.71° | nc | - | + |
| 34.29° | - | nc | + |
| 42.86° | - | + | nc |
注意点が1つあります。従来のコレクターモーターでは、ブラシが巻線の切り替えを担当します。ここで、ローターの位置を自分で決定する必要があります。
ホールセンサー
次に、図に示されている黒い点に3つのホールセンサーを配置します。 センサーが赤い磁石の反対側にあるときに論理ユニットを生成することに同意しましょう。 合計で6つの(サプライズ!)3つのセンサーの可能な状態:2 3-2合計で8つの可能な状態がありますが、センサー間の距離のために、3つすべてが論理ゼロまたは論理ユニットにあることはできません:

周期の3分の1だけ互いにシフトされた3つの信号を生成することに注意してください。 ちなみに、電気技師は私のような初心者を完全に混乱させるよりも、度という言葉を使用して、120°について話しています。 独自のモーターコントローラーを作成する場合は、センサーから信号を読み取り、それに応じて巻線の電圧を切り替えます。
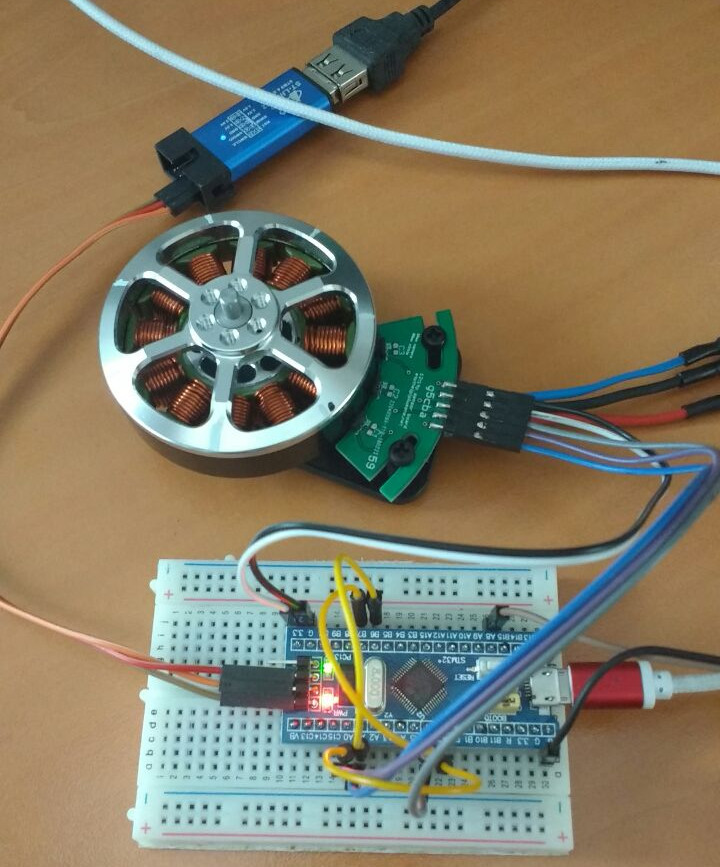
センサーを配置するために、私はちょうどそのようなスカーフを使用しました 。 イーグルプロジェクトはリンク上にあるので、私は中国人にたくさんの同様のスカーフを注文しました。
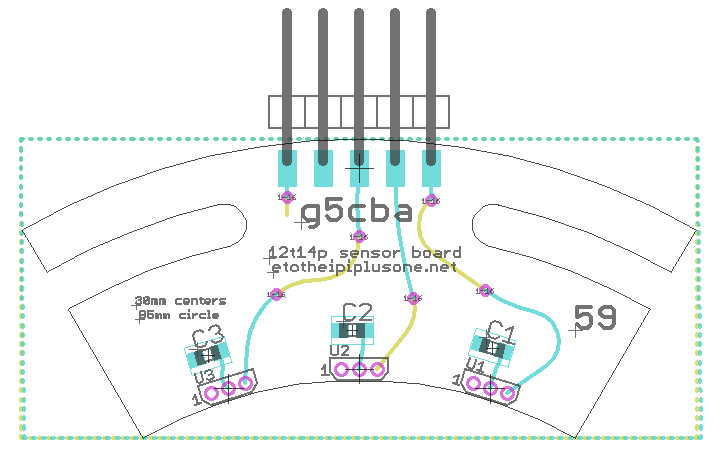
これらのスカーフには、3つのホールセンサーしか搭載されていません。 さて、コンデンサーを入れることができる味に、私は気にしませんでした。 固定子に対するセンサーの位置を調整するための非常に便利な長いスロットを作成しました。
待ってください。しかし、これは従来のインクリメンタルエンコーダからの直交信号に非常に似ています!
できたらいいのに 唯一の違いは、インクリメンタルエンコーダが互いに90°オフセットした2つの信号を提供し、120°オフセットした3つの信号があることです。 同じ青いタブレットなど、通常の直交デコーダで2つを取得するとどうなりますか? 1回転あたり4カウント、つまり1回転あたり28カウントの精度でシャフトの位置を決定できます。 意味がわからない場合は、 最初の記事の直交デコーダーの動作原理をお読みください。
私は長い間、3つの信号すべてをどのように使用できるのかと考えました。1回転あたり6つのイベントがあるため、1回転あたり42カウントを取得できるはずです。 最後に、ブルータブレットにはハードウェア直交デコーダーがたくさんあるので、ブルートフォースにすることにしました。そのため、3つのカウンターを入れることにしました。
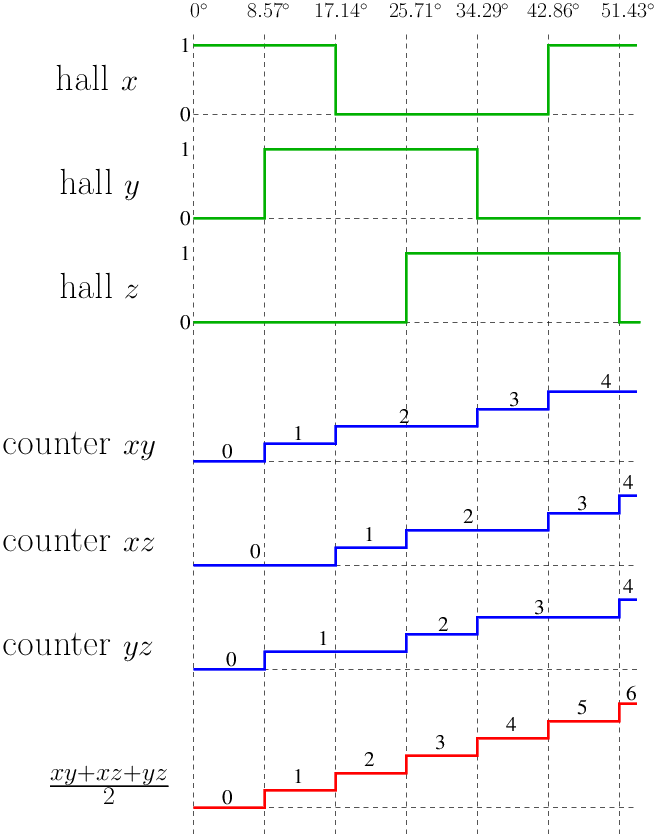
各イベントで2つが増加するため、3つのカウンターを加算して2で割ると、1回転あたり6 * 7 = 42カウントの精度で、均一にカチカチ音をたてるシャフト位置決定子が得られます!
以下は、ホールセンサーを青いタブレットに接続するためのレイアウトです。
そして、なぜすぐにエンジンにセンサーがないのですか?
一部のアプリケーション(ヘリコプターなど)では、これらの問題はすべて不要です。 コントローラーは、コイルのローター電流で何が起こっているかを推測しようとしています。 一方で、これはそれほど問題ではありませんが、一方で、エンジンの起動時に問題が発生することがあります。そのため、たとえば、ほぼゼロの速度が必要なロボット工学などではあまり適用されません。 通常の中国のヘリコプターESC(電子スピードコントローラー)からエンジンに電力を供給してみましょう。
私のコントローラーは、入力にPPM信号が必要です。これは、周波数が50Hzのパルスで、パルス長は速度を設定します:1ms-停止、2ms-最大可能速度(KVモーター*電圧と見なされます)。
ここでは、青いタブレットのソースコードとキューバのファイルをレイアウトしました。 タイマー1はESC用のPWMを生成し、タイマー2,3,4は対応する直交信号をカウントします。 前回の記事で、どこで何をクリックするかを詳細に描いたので、ここではソースコードへのリンクのみを示します。
ESCの入り口で、ノコギリの速度基準を示します。どのように機能するかを見てみましょう。 青いタブレットの出力はここにあり、グラフを描くコードはここにあります 。
私のエンジンの定格は400KVであり、10Vに電力を供給しているため、最高速度は約4000 rpm = 419 rad / sになります。 さて、スケジュールは間に合いました:
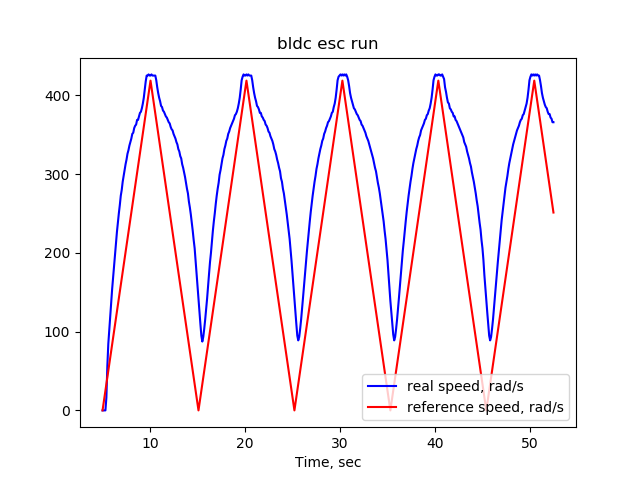
実際の回転数は、ヘリコプターに耐えることができますが、他の多くの状況では完全に適用できませんが、実際には、ホールセンサーからの信号を必要とするより高度なコントローラーを使用したいというタスクに非常に対応していることがわかります。 まあ、ボーナスとして、ローターの回転角を取得します。これは非常に便利です。
まとめると
私は幼少期をこの本に抱きしめながら過ごしましたが、今ではブラシレスコレクターの作品の原理を吸うことができました。
このようなステッピングモーターとヘリコプターモーターは(概念的に)同じものであることがわかります。 違いは相の数だけです:shagoviki(通常は例外があります)は90°シフトした2つの相によって制御され、ブラシレス(通常)は120°シフトした3つの相によって制御されます。
もちろん、他の純粋に実用的な違いがあります。ステップワームは、保持モーメントとステップの再現性を高めるように設計されていますが、ヘリコプタエンジンは、巻線、ベアリングなどの数に影響を与える速度と回転の滑らかさを実現します しかし、最終的には、従来のブラシレスコレクターをステップモードで使用することができ、一定の回転でのステップステップでは、同じ制御が行われます。
更新: Arastasの美しいアニメーション: