技術の現代のトレンドは、より高度な統合の道を歩んでいます。進歩により、電子デバイスの開発プロセスを設計者の組み立てにますます近づけることができます。 最も顕著な例の1つは、いわゆる「チップオンシステム」の膨大な数です-SoC、ほとんどあらゆる好みのマイクロコントローラーと周辺機器の束。 今日は、これらのシステムの1つであるNordic SemiconductorチップNRF51822に注目します。これは、Bluetooth 4.0標準に含まれるBLEテクノロジーと連携するように適合されたシステムのソリューションです。
また、電子デバイスはますます統合のレベルを高めているので、プログラミングでより高いレベルの抽象化にまで踏み込んで、リアルタイムオペレーティングシステムであるRTOSを実行するBluetoothアプリケーションを作成してみませんか。
この記事の目標は、RTOS Keil-RTXを実行するNRF51822の簡単な組み込みアプリケーションを作成し、1秒に1回ADCをクエリし、受信した値をBLE特性に書き込むことです。 このトピックに興味がある場合-catへようこそ。
RTOSとBLEについて簡単に
RTOSについて多くのことが言われているので、繰り返さないために、 こことここでそれについて読むことをお勧めします。 RTOSを使用することの重要な機能のうち、コードに混乱を加えることなくプログラムの機能を非常に簡単に向上できることだけに注意したいと思います。 これは、プログラムの個々のセクションが互いに干渉することなく条件付きで同時に動作し、分離されたブロックとして実行できるために可能です。 そして、多くが実行時に要求される多数の異なるタスクを実行することが保証されている「システムオンチップ」用のアプリケーションを作成する場合、RTOSを使用することで生活が大幅に簡素化されます。
BLEの概要とその仕組みについては、 一連のすばらしい記事があり、とりわけ、いくつかのことを理解するのに役立ちました。 まだ読んでいない場合は、必ずチェックしてください。 この記事のフレームワークでは、このテクノロジーを使用する実用的なニュアンスに興味を持っています。
一般的に言って、「私たちはBLEとRTOSの友達です」と書いたので、ある意味で、これら2つの概念は参加しなくても非常にうまくいくので、私は少しcになりました。 事実、コントローラーでBLE規格を使用するために使用するBluetoothスタックは、それ自体が一種のRTOSであり、タスク、これらのタスクのディスパッチャー、タイマーが刻々と過ぎ、イベントが発生するという事実です。 したがって、私の個人的な意見では、BLEアプリケーションでのRTOSの使用は、アプリケーション全体を抽象化の1つのレベルに導くので、良い形になるでしょう。
必要なツール
NRF51の起動に関する基本的な問題に触れないようにするために、Comrade Foxekの記事に依存するため、同じツールが必要になります。
•デバッグボードNRF51
•OC Androidを実行しているスマートフォン
•nRF Connect Androidアプリ
•MKD ARM Keil uVision
RTOSセットアップ
古典的な方法で開始します-Pack Installerを使用してble_app_templateテンプレートプロジェクトをロードし(この手順の詳細については、 nRF51822:クイックスタートの記事を参照)、Run-Time Environmentマネージャーを使用して必要な依存関係を追加します。
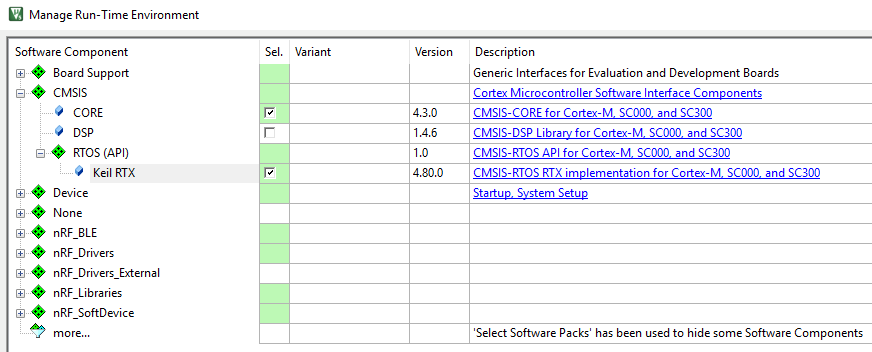
そこで、プロジェクトにRTOSを追加しました。 さて、鉄と相互作用できるように、チューニングを行う必要があります。 CMSIS-RTOSは、Cortex-Mコアに基づいたプロセッサでの動作によく適合しており、原則として、SysTickシステムタイマーを使用してOSの時間を量子化します。 ただし、NRF51コントローラーにはボード上にCortex-M0コアがあり、SysTickタイマーがないため、メーカーはRTOSクロッキングにRTC1リアルタイムクロックを使用することをお勧めします。 一方では、RTC1はコントローラーのスリープモードでオフにならないため、このソリューションはプラスです。つまり、RTOSで非常に低い消費でアプリケーションを構築できることを意味します。 一方、RTCブロックは32768 Hzの周波数でクロックされます。これは、システム時間のクォンタムのサイズを十分に小さくできないことを意味します。
UPD。 ランタイム環境マネージャーのapp_timerモジュールの[nRF_Libraries]タブで、[Rtx]オプションを選択します。 そうしないと、割り込みハンドラRTC1の複数の定義と競合します。
OSで動作するタイマーを理解させるために、いくつかの関数を追加する必要があります。タイマーと、いくつかのイベントハンドラーとタイマー割り込みを初期化します。 これを行うには、CMSISタブからRTX_Conf_CM.cファイルを開き、
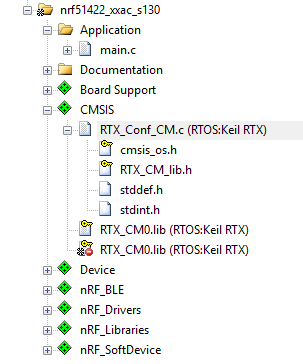
ヘッダーファイルnrf.hを追加し、グローバル関数セクションを見つけて、その中の関数の内容を次のものに置き換えます。
ソースコード
/*---------------------------------------------------------------------------- * Global Functions *---------------------------------------------------------------------------*/ /*--------------------------- os_idle_demon ---------------------------------*/ #define TIMER_MASK 0xFFFFFF volatile unsigned int rtos_suspend; /// \brief The idle demon is running when no other thread is ready to run void os_idle_demon (void) { unsigned int expected_time; unsigned int prev_time; NVIC_SetPriority(PendSV_IRQn, NVIC_GetPriority(RTC1_IRQn)); for (;; ) { rtos_suspend = 1; expected_time = os_suspend(); expected_time &= TIMER_MASK; if (expected_time > 2) { prev_time = NRF_RTC1->COUNTER; expected_time += prev_time; NRF_RTC1->CC[0] = (expected_time > TIMER_MASK) ? expected_time - TIMER_MASK : expected_time; NRF_RTC1->INTENCLR = RTC_INTENSET_TICK_Msk; NVIC_EnableIRQ(RTC1_IRQn); __disable_irq(); if (rtos_suspend) { NRF_RTC1->INTENSET = RTC_INTENSET_COMPARE0_Msk; __WFI(); NRF_RTC1->EVENTS_COMPARE[0] = 0; NRF_RTC1->INTENCLR = RTC_INTENSET_COMPARE0_Msk; } __enable_irq(); NRF_RTC1->INTENSET = RTC_INTENSET_TICK_Msk; expected_time = NRF_RTC1->COUNTER; expected_time = (expected_time >= prev_time) ? expected_time - prev_time : TIMER_MASK - prev_time + expected_time; } os_resume(expected_time); } } #if (OS_SYSTICK == 0) // Functions for alternative timer as RTX kernel timer /*--------------------------- os_tick_init ----------------------------------*/ /// \brief Initializes an alternative hardware timer as RTX kernel timer /// \return IRQ number of the alternative hardware timer int os_tick_init (void) { NRF_CLOCK->LFCLKSRC = (CLOCK_LFCLKSRC_SRC_Xtal << CLOCK_LFCLKSRC_SRC_Pos); NRF_CLOCK->EVENTS_LFCLKSTARTED = 0; NRF_CLOCK->TASKS_LFCLKSTART = 1; while (NRF_CLOCK->EVENTS_LFCLKSTARTED == 0) { // Do nothing. } NRF_RTC1->PRESCALER = 32;//OS_TRV; NRF_RTC1->INTENSET = RTC_INTENSET_TICK_Msk; NRF_RTC1->TASKS_START = 1; return (RTC1_IRQn); /* Return IRQ number of timer (0..239) */ } /*--------------------------- os_tick_val -----------------------------------*/ /// \brief Get alternative hardware timer's current value (0 .. OS_TRV) /// \return Current value of the alternative hardware timer uint32_t os_tick_val (void) { return NRF_RTC1->COUNTER; } /*--------------------------- os_tick_ovf -----------------------------------*/ /// \brief Get alternative hardware timer's overflow flag /// \return Overflow flag\n /// - 1 : overflow /// - 0 : no overflow uint32_t os_tick_ovf (void) { return NRF_RTC1->EVENTS_OVRFLW; } /*--------------------------- os_tick_irqack --------------------------------*/ /// \brief Acknowledge alternative hardware timer interrupt void os_tick_irqack (void) { if ((NRF_RTC1->EVENTS_TICK != 0) && ((NRF_RTC1->INTENSET & RTC_INTENSET_TICK_Msk) != 0)) { NRF_RTC1->EVENTS_TICK = 0; } } #if defined (__CC_ARM) /* ARM Compiler */ __asm __declspec(noreturn) void RTC1_IRQHandler(void) { EXTERN OS_Tick_Handler BL OS_Tick_Handler } #else #error "Unknown compiler! Don't know how to create SVC function." #endif #endif // (OS_SYSTICK == 0)
os_idle_demon()関数は、省エネモードを使用するときのシステムの動作を正確に担当します。アプリケーションがタスクでビジーでない場合、システム自体がコントローラーをスリープ状態にします。
次に、システムにSysTickを使用しないことを伝えます。これには、すべての機能が既に備わっているため、同時に、クロックが動作する周波数とシステム時間を量子化する方法を指定するためです。 これを行うには、同じファイルRTX_Conf_CM.cで構成ユーティリティを開き、適切なシステムパラメーターを設定します。
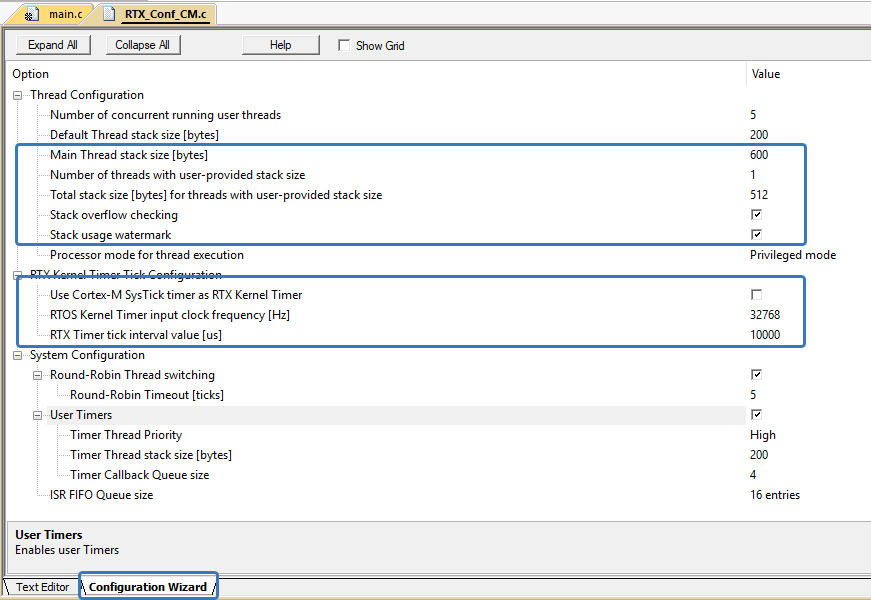
10 msのシステム読み取り間隔は偶然選択されませんでした:32768 Hzのクロック周波数で327スプリッターを使用すると、タイマー周波数は99.9 Hzになり、少なくともある程度の妥当な精度でシステムタイミングを提供します。 この間隔に低い値を使用する必要がある場合は、許容可能な精度を与える値を選択できます(たとえば、除数31および間隔長977μs)が、これらは非円形の数値になり、コードに混乱をもたらします。 また、非標準のスタックサイズでストリームを作成し、これらのストリームにメモリを割り当て、スタックの透かしを刻むこともできます。これにより、デバッグがより視覚的になります。
この段階で、プログラムを組み立ててコントローラーにダウンロードすることができます。 オペレーティングシステムが起動し、メイン関数を唯一のスレッドとして実行し始めます。 ただし、RTOSの意味は、さまざまなタスクがさまざまなスレッドでスピンすることなので、BLEスタック用に独自のスレッドを作成します。
// ble_stack_thread osPoolDef(ble_evt_pool, 8, ble_evt_t); // osPoolId ble_evt_pool; // osMessageQDef(ble_stack_msg_box, 8, ble_evt_t); // osMessageQId ble_stack_msg_box; // osThreadId ble_stack_thread_id; // void ble_stack_thread(void const * arg); // osThreadDef (ble_stack_thread, osPriorityAboveNormal, 1, 400);
ここで、スタックが使用するメモリプール、スタックがシステムからメッセージを受信するメールボックス、およびストリーム自体を決定し、その番号と実行される関数を宣言しました。 スレッドが何をするかを決定するだけでなく、システムおよびスタックイベントハンドラーでその作成関数を宣言します。
ソースコード
// BLE void ble_stack_thread(void const * arg) { uint32_t err_code; osEvent evt; ble_evt_t * p_ble_evt; UNUSED_PARAMETER(arg); while (1) { evt = osMessageGet(ble_stack_msg_box, osWaitForever); // wait for message if (evt.status == osEventMessage) { p_ble_evt = evt.value.p; switch (p_ble_evt->header.evt_id) { case BLE_GAP_EVT_CONNECTED: err_code = bsp_indication_set(BSP_INDICATE_CONNECTED); APP_ERROR_CHECK(err_code); m_conn_handle = p_ble_evt->evt.gap_evt.conn_handle; break; case BLE_GAP_EVT_DISCONNECTED: m_conn_handle = BLE_CONN_HANDLE_INVALID; break; default: // No implementation needed. break; } (void)osPoolFree(ble_evt_pool, p_ble_evt); } } } // BLE void ble_create_thread (void) { ble_evt_pool = osPoolCreate(osPool(ble_evt_pool)); ble_stack_msg_box = osMessageCreate(osMessageQ(ble_stack_msg_box), NULL); ble_stack_thread_id = osThreadCreate(osThread(ble_stack_thread), NULL); }
ご覧のとおり、on_ble_evtイベントハンドラーの標準関数は、ストリームへの単純なメッセージ転送に置き換えられています。この内部では、ハンドラーが実行に使用するロジックが既に構成されています。
システムにストリームを登録するには、メモリプールとメールボックスを作成する関数を作成します。その後、ストリームを作成し、少し前に宣言した識別子で登録します。 これをすべてmainに追加して実行するだけです。
ソースコード
int main(void) { uint32_t err_code; bool erase_bonds; static osStatus status; // status = osKernelInitialize(); // timers_init(); ble_stack_init(); device_manager_init(erase_bonds); gap_params_init(); advertising_init(); services_init(); conn_params_init(); // err_code = ble_advertising_start(BLE_ADV_MODE_FAST); APP_ERROR_CHECK(err_code); ble_create_thread(); // status = osKernelStart(); }
関数osKernelInitialize()およびosKernelStart()に注意してください-mainはすでにストリームであるため、入力されるまでにRTOSはすでに実行されています。 ただし、スレッドを作成し、停止したOSで周辺全体を構成する方がよいため、最初の機能を一時停止し、2番目の機能を再開して動作させます。
さらに、bsp_bleに関連するものはすべて、プロジェクトから削除しました。このライブラリはRTOSをバイパスするスタックに干渉しようとしているためです。 メインはストリームであるため、メインループ自体もメインから削除しました。すべての初期化の後、メモリを予約したままにする必要はありません。 したがって、主な目的、およびシステムが動作し続ける、これらは奇跡です。
これで、プログラムをビルドし、コントローラーにダウンロードして、nRF Connectプログラムを使用してデバイスに接続できます。
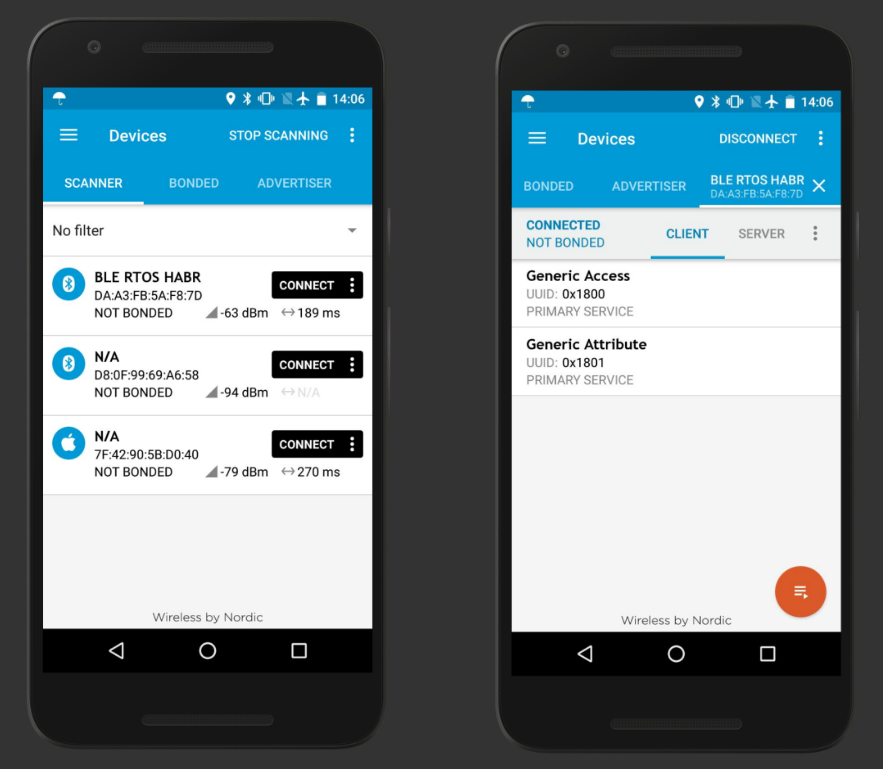
ご覧のとおり、まだ単一のサービスはありませんので、修正する時が来ました。 ご存知のように、ADCからデータを読み取り、サービスの特性に書き込みます。 繰り返して自分の自転車を構築しないように、ここからサービスと機能を作成するためのテンプレートを使用します 。
ソースコード
// void services_init(void) { ble_uuid_t ble_uuid; /* 128 - UUID */ ble_uuid128_t base_uuid = ADC_BASE_UUID; uint8_t uuid_type; ble_uuid.type = BLE_UUID_TYPE_VENDOR_BEGIN; ble_uuid.uuid = ADC_SERVICE_UUID; sd_ble_uuid_vs_add(&base_uuid, &ble_uuid.type); sd_ble_gatts_service_add(BLE_GATTS_SRVC_TYPE_PRIMARY, &ble_uuid, &adc_handles); } /* * UUID - * handles - ( ) * n_bytes - * iswrite, isnotf, isread - , , */ uint32_t char_add(uint16_t UUID, ble_gatts_char_handles_t * handles, uint8_t n_bytes, bool iswrite, bool isnotf, bool isread) { ble_gatts_char_md_t char_md; ble_gatts_attr_md_t cccd_md; ble_gatts_attr_t attr_char_value; ble_uuid_t char_uuid; ble_gatts_attr_md_t attr_md; memset(&cccd_md, 0, sizeof(cccd_md)); BLE_GAP_CONN_SEC_MODE_SET_OPEN(&cccd_md.read_perm); BLE_GAP_CONN_SEC_MODE_SET_OPEN(&cccd_md.write_perm); cccd_md.vloc = BLE_GATTS_VLOC_STACK; memset(&char_md, 0, sizeof(char_md)); char_md.char_props.notify = isnotf; // ; char_md.char_props.write = iswrite; // ; char_md.char_props.read = isread; // ; char_md.p_char_user_desc = NULL; char_md.p_char_pf = NULL; char_md.p_user_desc_md = NULL; char_md.p_cccd_md = &cccd_md; char_md.p_sccd_md = NULL; /* UUID - 128 - */ char_uuid.type = BLE_UUID_TYPE_VENDOR_BEGIN; char_uuid.uuid = UUID; memset(&attr_md, 0, sizeof(attr_md)); BLE_GAP_CONN_SEC_MODE_SET_OPEN(&attr_md.read_perm); BLE_GAP_CONN_SEC_MODE_SET_OPEN(&attr_md.write_perm); attr_md.vloc = BLE_GATTS_VLOC_STACK; attr_md.rd_auth = 0; attr_md.wr_auth = 0; attr_md.vlen = 0; attr_char_value.p_uuid = &char_uuid; attr_char_value.p_attr_md = &attr_md; attr_char_value.init_len = n_bytes; attr_char_value.init_offs = 0; attr_char_value.max_len = n_bytes; // ; attr_char_value.p_value = NULL; // ; /* */ sd_ble_gatts_characteristic_add(adc_handles, &char_md, &attr_char_value, handles); return 0; }
ここで、ADC_BASE_UUIDとADC_SERVICE_UUIDは、次の形式で定義された複合サービス識別子です。
/* UUID ( UUID ) */ #define ADC_BASE_UUID {0x66, 0x9A, 0x0C, 0x20, 0x00, 0x08, 0x1A, 0x8F, 0xE7, 0x11, 0x61, 0xBE, 0x00, 0x00, 0x00, 0x00} /* UUID ( UUID ) */ #define ADC_SERVICE_UUID 0x1533 #define ADC_CHAR_UUID 0x1534
これで、1バイトのデータを含む1つの特性を持つサービスができました。 このバイトを有用な情報で埋めるだけであるため、 記事を参照してADCを初期化します。ADCは1秒間に1回変換を実行し、特性の内容を更新する関数を追加します。
ソースコード
// void ADC_init (void) { // 2 8 NRF_ADC->CONFIG = 0x00; NRF_ADC->CONFIG |= (ADC_CONFIG_RES_8bit << ADC_CONFIG_RES_Pos)| (ADC_CONFIG_INPSEL_AnalogInputOneThirdPrescaling << ADC_CONFIG_INPSEL_Pos)| (ADC_CONFIG_PSEL_AnalogInput2 << ADC_CONFIG_PSEL_Pos); NRF_ADC->INTENSET |= ADC_INTENSET_END_Enabled << ADC_INTENSET_END_Pos; NRF_ADC->ENABLE |= ADC_ENABLE_ENABLE_Enabled << ADC_ENABLE_ENABLE_Pos; // NVIC_SetPriority(ADC_IRQn, 1); NVIC_EnableIRQ(ADC_IRQn); // NRF_TIMER1->POWER = 1; NRF_TIMER1->MODE = TIMER_MODE_MODE_Timer << TIMER_MODE_MODE_Pos; NRF_TIMER1->PRESCALER = 10; // 16 MHz / 2^10 = 15625 Hz NRF_TIMER1->CC[0] = 15625; // 15625 Hz / 15625 = 1 Hz NRF_TIMER1->INTENSET = (TIMER_INTENSET_COMPARE1_Enabled << TIMER_INTENSET_COMPARE1_Pos); NRF_TIMER1->SHORTS |= (TIMER_SHORTS_COMPARE0_CLEAR_Enabled << TIMER_SHORTS_COMPARE0_CLEAR_Pos); // PPI NRF_PPI->CH[0].EEP = (uint32_t) &NRF_TIMER1->EVENTS_COMPARE[0]; NRF_PPI->CH[0].TEP = (uint32_t) &NRF_ADC->TASKS_START; NRF_PPI->CHEN |= PPI_CHEN_CH0_Enabled; NRF_PPI->CHENSET |= PPI_CHENSET_CH0_Enabled; NRF_PPI->TASKS_CHG[0].EN = 1; NRF_TIMER1->TASKS_START = 1; } // void ADC_IRQHandler(void) { rtos_suspend = 0; NRF_ADC->EVENTS_END = 0; if (NRF_ADC->CONFIG >> ADC_CONFIG_PSEL_Pos == ADC_CONFIG_PSEL_AnalogInput2) { NRF_TIMER1->EVENTS_COMPARE[0] = 0; adc_val = NRF_ADC->RESULT; osSignalSet(char_update_thread_id, 1<<CharUpdateSignal); } }
割り込みハンドラには次のような構造があることに注意してください
rtos_suspend = 0;
rtos_suspend変数自体はRTOS構成ファイルで定義され、main.sにエクスポートされます。 オペレーティングシステムは割り込みを制御しないため、この変数は、システムが現時点でアイドル状態ではなく割り込みハンドラーにあることをプログラムが理解するために必要です。つまり、省エネ機能を今すぐアクティブにしないでください。 それ以外の場合、システムの動作は予測できないままなので、各割り込みハンドラーがこの変数をゼロにすることを強くお勧めします。
割り込みハンドラーからスタックでアクションを実行することは不可能なので(この場合、特性を更新します)、これを行うスレッドを作成できます。 割り込みからのフローと対話するために、信号などのツールがあります。 本質的に、シグナル(これらは設定およびリセットできるフラグ変数の単なるビットです)は、割り込みに非常に似ています。 特性とそのアラート信号を記録するためのストリームを作成し、メインに追加します。
糸
// void char_update_thread (void const* arg); // osThreadId char_update_thread_id; // osThreadDef(char_update_thread, osPriorityNormal, 1, 0); // int32_t CharUpdateSignal = 0x01; // void char_update_thread (void const* arg) { while(1) { osSignalWait(1<<CharUpdateSignal,osWaitForever); ble_char_update(&adc_val,1,adc_char_handles.value_handle); } }
メイン
int main(void) { uint32_t err_code; bool erase_bonds; static osStatus status; // status = osKernelInitialize(); // timers_init(); ble_stack_init(); device_manager_init(erase_bonds); gap_params_init(); advertising_init(); services_init(); char_add(ADC_CHAR_UUID,&adc_char_handles, 1, false, false, true); conn_params_init(); // err_code = ble_advertising_start(BLE_ADV_MODE_FAST); APP_ERROR_CHECK(err_code); // ADC_init(); // ble_create_thread(); char_update_thread_id = osThreadCreate(osThread(char_update_thread),NULL); // status = osKernelStart(); }
これで準備完了です。 プログラムをコントローラーにロードして、取得したものを確認できます。
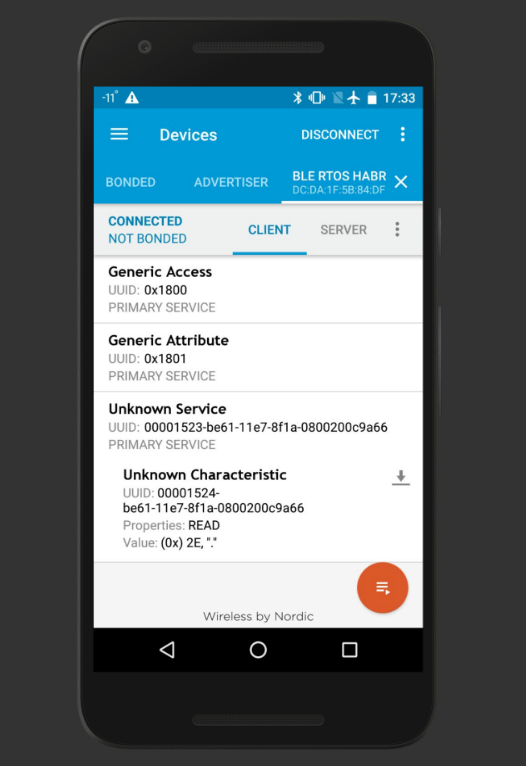
ご覧のとおり、1バイトの値を格納する1つの特性を持つサービスがあります。 これを読み取って、ADCの入力での電圧変化に応じて値が変化することを確認できます。 この特性を通知することも可能で、デバイスの特性のデータが変更された場合、スマートフォンで自動的に更新されます。
おわりに
結論として、一見RTOSはプロジェクトに不必要な複雑さをもたらしているように見えますが、これは完全に真実ではありません。 実際、作成したアプリケーションは、すべてのタスク用のメモリがなくなるまで簡単にスケーリングできます。 新しいモジュールごとに、何らかの数学的な操作であろうと周辺機器と連携する場合であろうと、独自のスレッドを作成するだけで十分です。プログラマーが考える必要があるのは、タスクの優先順位付け方法です。セマフォとラッチを使用して同期を構築するための同じリソース。
参照資料
RTOS BLEプロジェクト
Keil-RTX Webページ
nRF51822の概要:クイックスタート
nRF51822の概要:省エネルギーと一部の周辺機器
NRF51822製品ページ