このトピックは非常に広範囲であり、多くの資料がありましたので、読みやすいように2つの部分に分けることにしました。 2番目の部分はここから入手できます 。
まえがき
ビルトインセンサー-これはスマートフォンを満たしてスマートにします。 各スマートフォンには、何らかのセンサーが装備されています。 さらに、スマートフォンのセンサーセットが大きいほど、その機能は広くなります。 当然、Sailfish OSオペレーティングシステムを実行しているスマートフォンも例外ではありません。
ほとんどのスマートフォンユーザーにとって、センサーは、デバイスが傾けられたときに画面を回したり、部屋の照明を減らしながら輝度を下げたりするなど、日常の使用に利便性をもたらします。 ただし、センサーを使用すると、拡張現実および仮想現実を作成するまで、より真剣なアイデアを実装できます。 もちろん、このような規模でのセンサーの使用は考慮しませんが、それらの機能のかなり完全な全体像を示すことができます。
Qt Sensors APIの概要
Sailfish OSでセンサーを操作するためのツールキットはQt Sensors APIの形式で提供され、ネイティブC ++ライブラリとQMLコードから直接操作するためのインターフェイスの両方を提供します。
Qt Sensors APIからQMLタイプを使用するには、 qt5-qtdeclarative-import-sensorsプラグインの依存関係をSailfish OSのアプリケーションプロジェクトに追加する必要があります。 これを行うには、 プロジェクトの YAMLファイルのRequiresセクションにプラグインの名前を追加します。
... # Runtime dependencies which are not automatically detected Requires: - sailfishsilica-qt5 >= 0.10.9 - qt5-qtdeclarative-import-sensors ...
プラグインを接続した後、 QtSensorsモジュールバージョン5以降をQMLコードにインポートする必要があります。 執筆時点では、Sailfish OSで利用可能な最新バージョンはバージョン5.2です。 例で使用されます。
import QtSensors 5.2
Sensor APIをC ++コードで直接使用する場合、プラグインへの依存関係を追加する必要はありません。 代わりに、 .proプロジェクトファイルのQtSensorsライブラリを使用してレイアウトをポイントする必要があります。 これは、それに行を追加することで行われます
QT += sensors
その後、すべてのAPIクラスがプロジェクトに含まれるようになり、ライブラリ全体を一度にインポートできるようになります。
#include <QtSensors>
または、必要なクラスのみ、たとえば加速度計:
#include <QtSensors/QAccelerometer>
使用可能なセンサーのセットは、主にデバイスの充填に依存します。 たとえば、INOI R7スマートフォンには、方位センサー、照明、回転、傾斜、近接、磁場強度、および加速度計があります。
Sailfish OSの場合、センサーを操作するとQt Sensors APIの構築に役立ちます。 このAPIでカバーされるセンサーのセットは、この記事で説明されているものよりもはるかに広範囲です。
Qtセンサーでは、各センサーは、C ++クラスと、対応するC ++クラスをラップするQMLタイプという2つのインターフェースで表されます。 どちらのインターフェイスもセンサー機能への完全なアクセスを提供するため、どちらを使用するかは開発者の要望と能力のみに依存します。
まず、デバイスで使用可能なすべてのセンサーのリストを取得します。 このためのSensorGlobal要素とその3つのメソッドがあります。
- 文字列defaultSensorForType(type) ;
- リスト<string> sensorTypes() ;
- list <string> sensorsForType(type) 。
sensorTypesは、デバイスに存在するすべてのタイプのセンサーのリストを返し、 sensorsForTypeは、指定されたタイプのセンサーの登録済み識別子を返します。 defaultSensorForTypeは、名前が示すとおり、指定されたタイプの標準センサーの識別子、つまり、識別子が明示的に指定されていない場合にQMLコンポーネントが使用するセンサーの識別子を返します。
上記の方法の類似物もC ++に存在します。 QSensorsクラスの静的関数は次のとおりです。
- static QByteArray defaultSensorForType(const QByteArray&type) ;
- 静的QList <QByteArray> sensorTypes() ;
- static QList <QByteArray> sensorForType(const QByteArray&type) 。
それらの目的は、対応する名前を持つQMLメソッドの目的と完全に一致しています。
すべてのデバイスセンサーのリストを表示する小さなアプリケーションを作成します。
Page { SilicaListView { header: PageHeader { title: "Available sensor types" } anchors.fill: parent delegate: ListItem { Label { text: modelData anchors.verticalCenter: parent.verticalCenter x: Theme.horizontalPageMargin } } // model: QmlSensors.sensorTypes() } }
Jolla Cスマートフォンでは、 QmlSensors.sensorTypes()メソッドは次のセンサーのリストを返します。
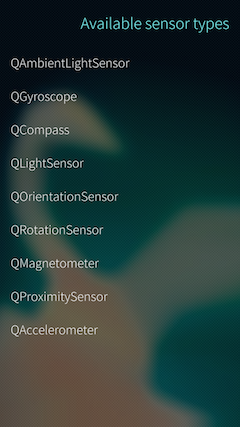
これは、光センサー、近接センサー、角度センサー、加速度計というセンサーのセットがデバイスで利用できることを示しています。
センサーで動作するすべてのクラスは、1つの共通のセンサー親クラスから継承されます。 このクラスは抽象センサーであり、そのプロパティとメソッドはそのすべての子クラスに適用できます。
- active-現在のセンサーアクティビティを決定するプロパティ。 trueに設定することは、 start()メソッドを呼び出すことと同じです-可能であれば、センサーからの値の読み取りを開始します。 それどころか、 falseを割り当てると読み取りが停止します。
- alwaysOn-画面がオフのときのセンサーのアクティビティを決定するプロパティ。
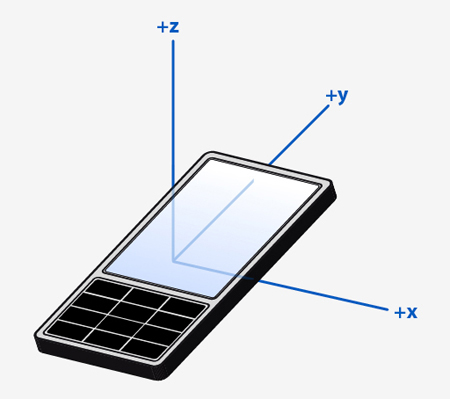
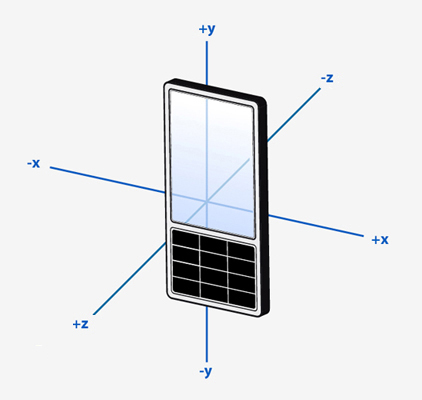
- axesOrientationMode-デバイスの位置が値の測定軸にどのように影響するかを定義します。 デフォルトでは、軸は画像に示すように配置されます。
次の3つのモードが利用可能です。
- FixedOrientation-軸は常にデバイスに対する相対的な位置を保持します。 この値は標準であり、デバイスが軸方向モードの変更をサポートしていない場合に使用されます。
- AutomaticOrientation-軸は空間内の位置を維持し、デバイスに対する位置を変更します。 つまり、デバイスの位置はセンサーの値に影響しません。
- UserOrientation-軸の位置はユーザーが設定します。
- busy-センサーのビジー状態を含むプロパティ。 彼が別のプロセスで忙しい場合、それを使用することは不可能です。
- dataRate-センサーとのデータ交換の頻度が含まれ、1秒あたりの操作数で表されます。
- エラー -発生した最後のエラーのコード。 プロパティ値はエラーが発生すると自動的に設定され、手動で変更することはできません。
- reading - SensorReadingを含むプロパティ -センサーから値を読み取るコンポーネント。 センサーから情報を受信するのはその使用です。 このプロパティの値は、設定された為替レートに従って更新され、手動で書き込むことはできません。
- type-センサーの文字列名。 オブジェクトの決定時に設定され、変更できません。
- description-センサーを説明する文字列が含まれます。 typeと同様に、オブジェクトの定義時に設定され、変更できません。
- start() -センサーからの値の読み取りを開始します。これは、 アクティブなプロパティにtrueを割り当てることと同じです。
- stop() -センサーからの値の読み取りを停止します。これは、 アクティブプロパティにfalseを割り当てることと同じです。
Sensorは単なる抽象型であるため、直接宣言することはできません。 代わりに、特定のタイプのセンサーに対応するコンポーネントを継承する必要があります。
読み取りプロパティに含まれるSensorReadingタイプのオブジェクトは、センサーから値を読み取るすべてのコンポーネントの基本タイプとして機能するため、特別な注意が必要です。 読み取りプロパティの値は、 dataRatesプロパティで指定されたリフレッシュレートに従って変更されますが、センサーがアクティブな状態にあるときのみ変更されます。 センサーがアクティブでない場合、 読み取り値には最新の測定値が含まれ、対応するセンサーのサポートがないデバイスではnullが含まれます 。
SensorReading自体には、センサーから最後に情報が受信された時刻を含むタイムスタンププロパティのみがありますが、そのサブクラスは、デバイスのセンサーから値を直接提供するプロパティを実装します。 SensorReadingは 、その子孫と同様に、直接宣言できません。 それらを取得する唯一の方法は、対応するセンサーを表すオブジェクトの読み取りプロパティにアクセスすることです。
加速度計
おそらく最も一般的なセンサーである加速度計を使用した例を使用して、Sailfish OSセンサーの検討を開始できます。 Gセンサーとも呼ばれる加速度計は、モバイルデバイスのほとんどすべての最新モデルに搭載されています。 加速度計の一般的なアプリケーションは、スマートフォンの位置が変化したときの加速度の変化の登録です。これは、スマートフォンの画面上の画像の向きを変更するために使用されます。
そのため、加速度計から測定値を受信するために最初に行うことは、目的のページで加速度計コンポーネントを宣言してアクティブ状態にすることです。その特徴は、 Sensorのtype プロパティにQAccelerometer値が存在することです。
Accelerometer { id: accelerometer active: true }
すべて、コンポーネントが作成され、すでにデバイスの加速度計からの読み取り値を読み取っています。 しかし、開発者はどのようにしてこれらのまさにその次元を手に入れることができるでしょうか? ここで、上記の読み取りプロパティを思い出す必要があります。 今回は、QMLタイプのAccelerometerReading - SensorReadingの子孫が含まれています。これは、とりわけ、新しいプロパティx 、 yおよびzを取得しています。 これらには、それぞれ軸X、Y、Zに沿ったデバイスの線形加速度が含まれます。 axesOrientationModeの値を変更しなかったため、軸の位置は標準のまま、つまり下の画像に示す位置のままです。
X軸とY軸に沿った加速度値を、画面上の画像の水平位置と垂直位置に接続します。 これを行うには、X軸に沿って加速度値で水平に、Y軸に沿って加速度値で垂直に画像を変換する変換を画像に適用します。画面の境界を超えないように画像の許容位置に制限を追加します。
Image { id: fruct source: "http://social.fruct.org/content/img/fruct.png" transform: Translate { property double horizontalPosition: x - accelerometer.reading.x property double verticalPosititon: y + accelerometer.reading.y x: if (horizontalPosition < 0) { 0 } else if (horizontalPosition > page.width - fruct.width) { page.width - fruct.width } else { horizontalPosition } y: if (verticalPosititon < 0) { 0 } else if (verticalPosititon > page.height - fruct.height) { page.height - fruct.height } else { verticalPosititon } } }
その結果、スマートフォンを傾けると、FRUCTロゴが画面上を動き回ります。

Sensorと区別するAccelerometerコンポーネントのもう1つの機能は、 accelerationModeプロパティの存在です。これは、加速度センサーによる値の計算方法を制御します。 加速度を計算するための3つのモードがあります。
- 加速度計。結合 -重力とユーザーによるデバイスの動きの両方によって引き起こされる加速度の値を共同で考慮します。
- Accelerometer.Gravity-重力による加速度の値のみが考慮されます。 ユーザーによるデバイスの移動は、センサーから返される値には影響しませんが、デバイスの傾斜角度は考慮されます。
- Acceleration.User-ユーザーによるデバイスの動きによって引き起こされる加速度のみが考慮され、重力によって引き起こされる加速度の値は考慮されません。 このモードでは、デバイスが静止している場合、センサー値は0に近くなります。
すべてのデバイスとセンサーが計算モードを変更する機能をサポートしているわけではないことに注意してください。 この機能を持たないデバイスの場合、複合モードが使用され、 accelerationModeプロパティの値を変更しても測定に影響はありません。
近接センサー
近接センサーは、物理的に接触することなく、近接したオブジェクトに応答します。 たとえば、携帯電話に取り付けられた近接センサーを使用すると、通話中に電話がユーザーの耳に近づくとタッチスクリーンセンサーをオフにしたり、ポケットに移動したときにデバイスをスリープモードにしたりできます。 このことから、センサーの主なタスクはデバイスの画面をブロックすることであり、それによってユーザーが誤ってボタンを押したり、計画外のアクションを実行したりすることを防ぎます。 通常、このようなセンサーは上部のデバイスのフロントパネルにあります。 フロントカメラ用の穴のように見えます。
QMLの近接センサーは、 ProximitySensorコンポーネントで表されます。 親コンポーネントとの唯一の違いは、対応するProximityReading QMLタイプのnearプロパティが存在するためです。 このプロパティは、オブジェクトがセンサーに十分近い場所にある場合に当てはまります 。
必要なコンポーネントを定義したら、nearプロパティの値を変更するためのシグナルハンドラーを追加し、そのコンポーネントで必要なアクションを既に実行できます。 たとえば、オブジェクトがセンサーに近づくと、アプリケーションを最小限に抑えたり、本当に便利なことをしたりすることができます。これはすでに開発者の想像力に依存しています。
ProximitySensor { id: proximitySensor active: true } Connections { target: proximitySensor.reading onNearChanged: proximitySensor.reading.near ? appWindow.deactivate() : appWindow.activate() }
光センサー
光センサーは、モバイルデバイスの世界で最も古いセンサーの1つです。 そのタスクは、スマートフォンが使用される環境の照明レベルを測定することです。 これらの測定値は、画面の明るさを調整するためにスマートフォンソフトウェアによって使用されます:暗い場所では明るさが低下し、それによってユーザーの目にかかる負荷が軽減され、バッテリー電力が節約されます区別するために。
QMLタイプのLightSensorは、スイートの照明レベルを取得するためのAPIを提供します。これを使用して、画面の明るさなどのアプリケーション設定を調整できます。 また、Sailfish OSには画面のバックライトレベルを自動的に調整するためのソフトウェアが既に組み込まれていますが、これは開発者がアプリケーションに合わせて調整することを妨げるものではありません。
センサー読み取り値を取得するためのコンポーネントは、 読み取りプロパティから取得することもできます。 今回は、 照度プロパティを持つLightReadingオブジェクトが含まれます- 照度の値が含まれます。 nemo-qml-plugin-systemsettingsプラグインと組み合わせて光センサーを使用すると、アプリケーションに特に適した自動調整可能な輝度レベルを実現できます。 LightSensorの読み取り値をDisplaySettingsコンポーネントの輝度プロパティに関連付け、受け入れられる値の制限を設定するだけで、輝度レベルが目的の制限に適合します。 また、 autoBrightnessEnabledプロパティをfalseに設定して、オペレーティングシステムによる輝度レベルの自動調整を無効にする必要があります。
import org.nemomobile.systemsettings 1.0 Page { LightSensor { id: lightSensor active: true } DisplaySettings { id: display autoBrightnessEnabled: false brightness: if (lightSensor.reading.illuminance < 50 ) { 50 } else if (lightSensor.reading.illuminance > 100) { 100 } else { lightSensor.reading.illuminance } } }
さらに、 LightSensorはセンサーの視野角に関する情報を提供します。 fieldOfViewプロパティにアクセスして取得できます。 ただし、この機能はすべてのデバイスで使用できるわけではなく、 fieldOfViewに0が含まれている場合、悲しいかな、使用されるセンサーはそのような機能をサポートしていません。
Sailfish OSでは、照度のレベルを測定するための別のコンポーネント-AmbientLightSensorも利用できます 。 その機能は以前のセンサーとほぼ完全に似ていますが、スイートの照明値の代わりに、次のリストから以前に指定された定数を返します。
- AmbientLightReading.Undefined-ライトレベルを認識できません。
- AmbientLightReading.Dark-ダーク
- AmbientLightReading.Twilight-適度に暗い、
- AmbientLightReading.Light-明るい部屋で、
- AmbientLightReading.Bright-晴天の日陰で、
- AmbientLightReading.Sunny-直射日光の下。
したがって、照明レベルの正確な値が冗長であり、おおよその値で十分な場合に、このコンポーネントを使用することをお勧めします。 たとえば、暗闇で「夜間」モードに入るリーダーを作成できます。
まず、通常どおり、センサーコンポーネントが決定されます。
AmbientLightSensor { id: ambientLightSensor active: true }
元の色設定で背景とテキストを作成します。
Rectangle { id: background anchors.fill: parent color: "white" Label { id: text text: " , " anchors { fill: parent leftMargin: Theme.horizontalPageMargin rightMargin: Theme.horizontalPageMargin } wrapMode: Text.WordWrap color: "black" } }
最後に、画面上のオブジェクトに適用される状態と遷移のセットが設定されます。 状態の変化の条件は、正確には光センサーの低い値です。
states: State { name: "dark" PropertyChanges { target: text color: "white" } PropertyChanges { target: background color: "black" } when: ambientLightSensor.reading.lightLevel === AmbientLightReading.Dark } transitions: Transition { to: "dark" reversible: true ColorAnimation { duration: 200 } }
暗い場所では、左側の画面は右側の「夜」バージョンにスムーズに移行します。

| 
|
おわりに
この記事は最初の部分にすぎません。2番目の部分では、Sailfish OSオペレーティングシステムで使用可能なメインセンサーについて引き続き検討します。
技術的な問題は、ロシア語を話すコミュニティのSailfish OSのTelegramまたはVKontakteグループのチャネルでも議論できます。
著者:マキシムコステリン