「Space Rangers HD」 ( 1C出版社)の別のゲームボットは、人工知能(AI)の開発方法について興味深い考えを導きます。
いくつかの歌詞
謎のエピグラフを言い換えることができます:
円を描く
誰も気にしません
彼女から離陸
そして彼らは殺されています...
(ロジェリア)
理論のビット
機械は人間の仕事を促進するために作られています。 また、人自身ができない仕事をするために。 たとえば、普通の人は半トンの重さの荷物を持ち上げることはできませんが、ブロックシステムの助けを借りてできます。 コンピューティングマシン—コンピューターとそのソフトウェア—は、他のマシンと同じ目的を果たします。 たとえば、ある人に対して数万語をアルファベット順に並べ替える作業は退屈で、長い間それを行います。また、平均的なレベルの責任を持つ平均的なパフォーマーにとってはエラーの可能性が大きくなります。 現代のコンピュータは、このタスクをエラーなしで非常に短い時間(1秒未満)で実行します。 これはすべてよく知られており、ここではAIの定義を示すためだけに述べています。 この定義の独創性を主張することなく、AIには多くの定義があるため、AIについて話す前に、この用語を指定する必要があります。
そのため、次の定義を提供します。AIには、コンピューターが人間よりも著しく悪い問題を解決するタスクが含まれます。
今日のタスクのリストと50年前のタスクのリストを作成すると、これらのリストが異なることは明らかです。 ただし、その違いは、半世紀前の今日のコンピューターとコンピューターの一般的なコンピューティング機能の違いほど大きくはありません。 つまり、生産性とメモリ量が大幅に増加し、ほとんどすべての困難なタスクを解決するのが困難なままです。 意図的なあいまいさがあります。 計算の複雑さの理論の観点から、解決が難しい問題は、最悪の場合の問題の次元からの操作の数の指数関数的な理論的推定を伴う問題です。 この理論の主な問題は「P =? NP」は引き続きオープンです。 AIには、たとえばチェスのようなブルートフォースが時間内に可能であった場合、愚かなブルートフォースによって「単純に」解決されるタスクがあります。 ただし、他の多くのAIタスクは明らかに指数関数的な数の操作を必要とせず、同時に計算の複雑さのためではなく、ソリューションの信頼性の高い効率的なアルゴリズムを構築するのが難しいため、解決が困難に見えます。 明らかに、「解決するのが難しい」という用語のこのような2番目の意味は、最初のものとは質的に異なります。計算の複雑さの理論では、この用語は厳密に証明可能な指数推定を意味しますが、2番目の意味では、信頼性の高い効率的なアルゴリズムの構築の困難さの厳密な数学的証明は非常に難しいようです。 さらに、アルゴリズム的に不溶性の問題を考慮せず、人がタスクに対処する場合、それを解決するためのアルゴリズムがあると考えています。
AIの開発の現在の段階では、人間のスキルはあなたが努力する必要がある理想のように見えますが、人々はしばしば間違いを犯します。 これらのエラーのレベルは、特定の人の必要な知識の欠如、彼の不注意、疲労によって引き起こされる基本的なエラーから、幻想や認知の歪みなどのより複雑なエラーまでさまざまです。 これは重要な質問を意味します:AIタスクを人間よりもうまく解決できるか、つまり 「スーパーインテリジェンス」が可能かどうか、または多くのAIタスクが原則として常に正しく解決できないかどうか、つまり 誤った決定のゼロ以外の確率は常にありますか? 私の以前の投稿には、特にいくつかの例がありました:
[人間にとって]難しい認識のよく知られた例はcaptchaです。これはインターネットであらゆる段階で出くわします。 「言及された出版物で言及された別の重要な点は自治です:ラクダがロボットではないことを証明する前に、CAPTCHA変更ボタンを数回押す必要があるような落書きがあります。
絶対的な自律は有害な神話です。 少なくとも今後数十年間。 私自身および他の人々の経験から、著者[David Mindell、「マシンの台頭はキャンセルされました! ロボット化に関する神話 '']は、今日最も成功しているのは、人と機械との相互作用が完全に実現され、意思決定プロセスからの人の疎外ではないシステムであることを詳細に示しています。 私は個人的に、KR2HDゲームのゲームボットの謙虚な例でこの考えの正しさを確信しました。惑星の戦いのボットは、私たちの考えによれば、完全に自律的であり、このプロジェクトは停止しています。そのため、AIの多くの定義が提案されています。 これらの定義に従って、AIタスクにはさまざまな分類があります。 (定義の場合のように)独創性を主張することなく、次の分類を採用します。 これは目的別の分類です。
合理的なAIの目標は、次のような自律性のレベルを選択することです。
1)プログラムは有用です。
2)プログラムは、人と比較してあまり頻繁に間違われない。
3)プログラムは、記述、デバッグ、および保守のために過度に複雑になりません。
分類の別のクラスは、「革命的な」AIです。 その目的は、プログラムを可能な限り自律的にすることです。 そのようなプログラムは通常、科学的およびスポーツ的な関心を集めていますが、実際的な価値はゼロに近い場合があります。
上記の分類の観点から、以下に提案する問題の解決策は合理的です。 ここでは特に革新的なものは提案されていませんが、実際の可能性から実用化に向けたこのような穏やかなアプローチが科学にとって特に興味深いものになることを願っています。
定義では解決方法を指定していないことに注意してください。 提案された定義から、単純な実用的なイデオロギーが続きます。コンピューターが人よりも悪い問題を解決するという問題が見つかった場合、これはAIタスクです。 そして、あなたは好きなようにそれを解決することができます-ただ解決するために:あなたはニューラルネットワークとトレーニングを使用できますが、あなたはそれを使用することはできません。 提案された合理的なアプローチは、その結果、そのような問題を解決する際の経験を必然的に蓄積し、AIを前進させることが期待されています。 一般的に、これが起こることです。野心的なプロジェクトは失敗し、控えめなプロジェクトはゆっくりですが、AIを新しいフロンティアに押し上げます。
AIの研究方法についても言及する価値があります。 もちろん、ロボット設計者の標準部品から組み立てられた単純なロボットでさえ、非常に壮観であり、AIアイデアの普及に貢献し、AIの洗練されていないスポンサーを引き付けます。 残念ながら、このようなロボットを使用した実験の再現には明らかな困難が伴い、科学的な方法には再現性が必要です。 したがって、科学的には、この実験室研究ゲーム用に特別に構成されたものではなく、かなり一般的なゲームボットがより興味深いようです。
そして最後に、理論から実践に移ると、おそらく、AIに密接に関連する哲学的問題が言及されていないAIの基本的な研究を見つけることはできないでしょう。 それらの重要性を過小評価せずに、上記で提案した定義により、この作業の枠組みでこれらの問題の多くを掘り下げることができないことに注意します。
挑戦する
ゲーム2HDの主な目標は、できるだけ多くのポイントを獲得することです。 ゲームは式に従ってポイントを計算します:
ポイント=経験値*難易度/ 100 /最大(7、ゲーム時間/ 365)^ 1.3 、
敵の破壊、特に海賊の破壊を含む、 経験が蓄積される場所。
難易度 -他の開始条件の中でも50%から200%までは、新しいゲームを開始する前にプレイヤーによって設定されます。
ゲームの時間はゲーム内の日数です。各ターンは1日です。
ゲームは3300年1月1日のゲーム日から始まり、いくつかのストーリーに沿って展開できます。 しかし、経験豊富なプレイヤーは、トルトゥガックの星系での海賊との最も長い戦い(より正確には、彼らの暴行)が最も多くのポイントをもたらすことを知っています。 これはゲームの集大成です。ゲームの前の部分は本質的にこの戦闘の準備であり、次の部分は非常に短く、将来的にはポイントが減少するため、数日でできるだけ早く終了する適切なベースでゲームを終了することになります。 プレイヤーによって破壊された海賊の数の急激な増加は、ポイントの急激な増加を伴い、ゲームのレコードのトップテーブルのグラフにはっきりと表示されます。 ロボブレイン -1位、 シェリフ-2番目:

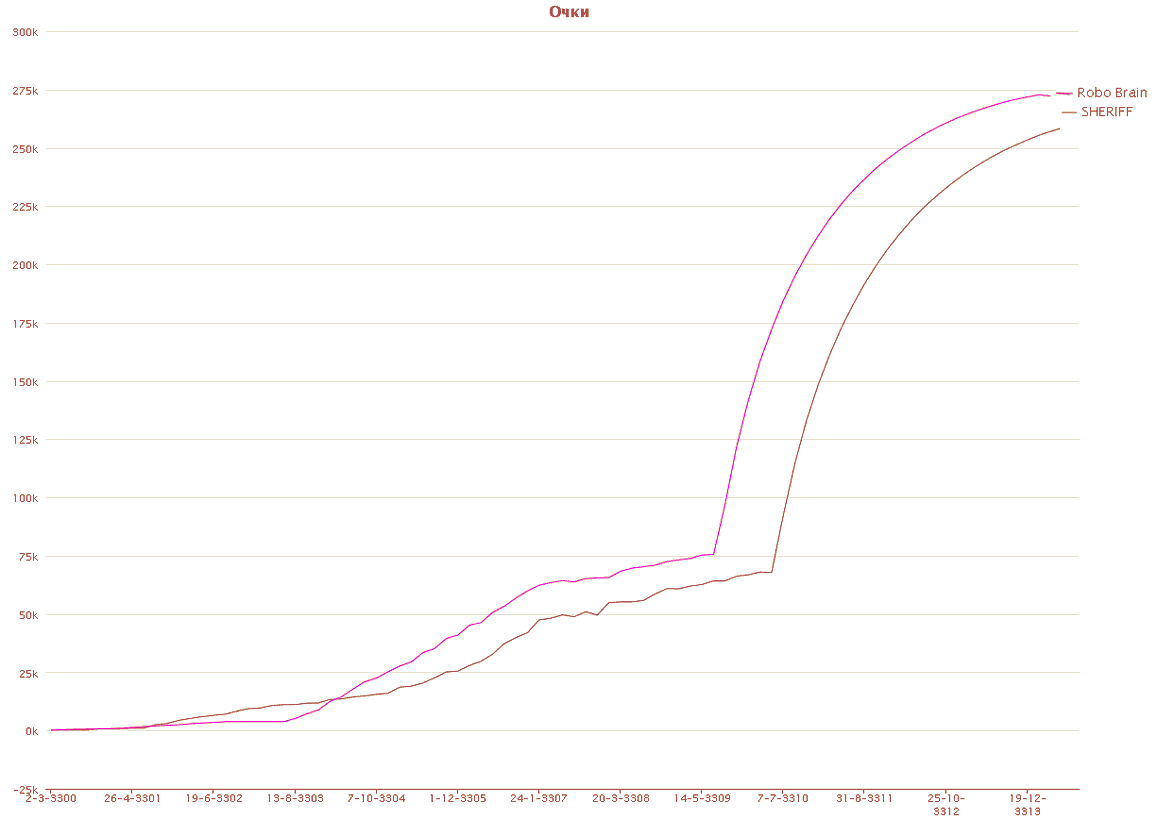
ご覧のとおり、この戦いは数ゲーム年続きますが、20年以上に及ぶこともあります。 最大ポイント数を達成するためにいくつかのオプションを列挙してレコードをプレイする場合(このゲーム手法については以下で説明します)、プレイヤーはトルトゥーガックでの戦いに数か月以上費やすことができます!
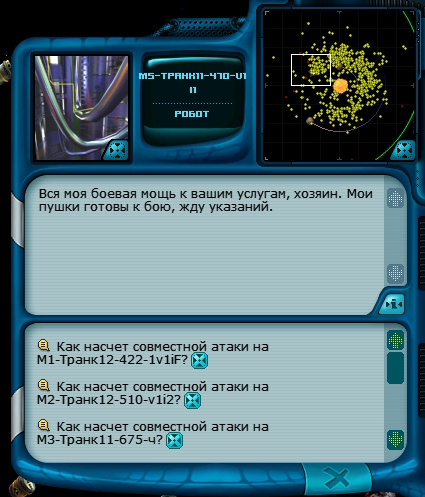
一連のタスクを完了すると、Tortugatsシステムがプレイヤーに利用可能になりますが、これについては詳しく説明しません。 このシステムは、2つの無人惑星と、ロジェリアと呼ばれる1つの海賊基地で構成されています。ロジェリアは、惑星と同様に、星の周りを円軌道で回転します。 軌道の直径が異なるため、衝突は不可能です。 いくつかのアクションを完了し、ロジェリアに着陸した後、プレーヤーは毎回約13人の海賊を破壊する機会を得ます。これは、ロジェリアの「蟻塚」から毎日離陸します。 ゲームにはさまざまな武器がありますが、この戦闘にはいわゆる大量破壊兵器(WMD)が最適です:VertixとIMHO-9000。
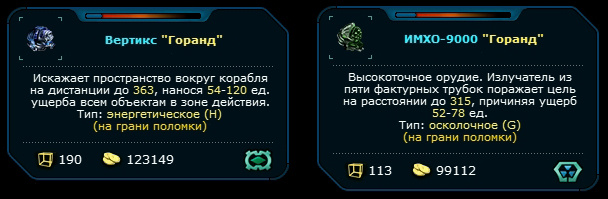
定型化された立方体の近くの左下隅の図は、アイテムの重量を示しています。 したがって、図に示されている頂点の重さは190ユニット、IMHO-9000の重さは113です。銃とは、マイクロモジュールと呼ばれるもので、銃に取り付けられると強度が増します。その結果、銃は各ショットと敵のショットで消耗しにくくなります。 取り付けられたマイクロモジュールをガンから取り外すことはできません。 減価償却は、上部の「温度計」によって示されます。 WMDの重要な特徴は、銃が狙っている敵船だけでなく、銃の動作範囲内にあるすべての敵船の敗北です。 同時に、次の銃のターゲットが前の銃のショットから破壊されるほど壊れやすい場合、次の銃は射撃する場所がなくなります。ボレーのコース内では、ボレーは同時に発生せず、銃は順番に発砲します そのため、プレイヤーは次の戦術的手法を使用します。半透明の半透明のロボット(またはトランク)を宇宙に発射し、それらを撃ちます。その後、ショットのエネルギーの大部分が海賊に送られます。

このような各ターゲットトランクには、プレーヤーが防護フィールドジェネレーター(GDF)とトランク本体を修理する修理ドロイドを事前に装備しています。 これにより、トランクは1人以上のプレイヤーの大量破壊兵器からの複数のショットに耐えることができます。 船舶で使用されるすべての機器は徐々に摩耗しますが、異なる速度で摩耗します。 ウォーミングギアは、多くのゲーム年の間に実際には摩耗しませんが、修理用ドロイドは比較的早く摩耗します。 大量破壊兵器を除くドロイドおよびその他の機器を修復するには、ナニトイドのアーティファクト(または単にnaniks、図を参照)を使用します。数回の移動で船の特別なスロットに取り付けると、使い古した機器が修復されます(上記に加えて、エンジン、燃料タンクも可能です) 、レーダー、キャプチャ、スキャナー)。 各船には、現在使用されていない機器、武器、トランクを保管できる船倉があります。 ホールドでは、これらすべてのものはほとんど摩耗しません。 したがって、ナニックスの早すぎる摩耗を避けるために、修理が完了したら、ホールドのスロットからすぐに取り外します。
すでに述べたように、WMDは修理されないため、完全に磨耗した後、WMDを宇宙に投げ入れ、グリップを備えたトランクを使用して拾い上げてロジェリアに輸送する必要があります。 ロジャーキャンペーンを成功させるには、プレイヤーの船の非常に優れた装備が必要です。この場合、数十人の海賊でさえ、アリの甲虫のように脅威を与えません。
戦闘中、プレイヤーの船はロジェリアに着陸するべきではありません。座っているとすぐに戦闘が停止し、海賊はプレイヤーの銃の下で毎日飛行しなくなります。 したがって、プレーヤーは同数のWMDを持ちます。 この量は、プレイヤーの船の容量(船上のすべてのものの最大許容総重量)によって制限されます。 しかし、船が保有するよりも多くの大量破壊兵器を使用できる戦術的なテクニックもあります。 これを行うには、トランクのガンスロットにWMDを配置します。 プレイヤーの船と同様に、各トランクには5つの銃スロットがあります(Tortugacでの戦闘用にスロットが少ない船は無効になり、通常は使用しません)。 他の物と同様に、WMDをトランクのトランクにロードすることは無意味です。トランクがプレイヤーの船倉にロードされると、トランクは船倉のすべての内容を船倉に自動的にアンロードするからです。 ただし、トランクの銃のスロットに設置された銃、およびトランクの他のスロットに設置された機器(通常はエンジン、燃料タンク、修理ドロイド、ガス回収、場合によっては捕獲-機器の詳細についてはこちらをご覧ください )、トランクはアンロードされません。 そのような装備の重量は、プレイヤーの船に積み込む際には考慮されません。 たとえば、合計重量が500ユニットのWMDがスロットに取り付けられている場合でも、図のトランクの重量は常に49ユニットになります。 そのため、プレイヤーはターゲットトランクに加えて、スペアWMDキットを取り付けた可能な限り多くのトランクトランクに連れて行き、すべてのWMDが無力になるまで海賊と戦います。
次のゲームのスクリーンショットは、画面の一部で、右側にロジェリア、プレイヤーの船、ターゲットトランクが表示されています。 トランクのWMDピクトグラムは、どのプレーヤーのWMDがトランクに向けられているかを示しています。 写真には、破壊時に海賊船から落下する多数の燃料樽も含まれています。 樽に加えて、met石と船および基地との衝突中に形成された鉱物がまだあります。 プレイヤーの船からトランクまでの緑色の点線は、次のターンに続く船のコースを示します。 この場合、船はトランクに従います。

コースを設定するには、プレーヤーは画面上のポイントにマウスカーソルを移動し、マウスの左ボタンを押す(「ポイントをクリックする」)必要があります。 このポイントがトランクの近くにある場合、船は指示された画面上のポイントではなく、トランクが飛ぶ場所までトランクをたどります。 ポイントがロジェリアの近くにある場合、船はロジェリアに着陸し、戦闘は予定より早く終了します。 着陸が起こらないように、ポイントをダブルクリックする必要があります。 コース設計のこれらすべての機能は、ゲームボットが検討する必要があります。
ご覧のとおり、ディスプレイスメントの観点から見ると、ゲーム空間は2次元に見えますが、ゲーム世界のオブジェクト(船、ベース、樽、,石など)は異なる場所に配置されるため、画面の平面に垂直でプレイヤーに向かう3番目の座標軸を考慮する価値がありますこの軸に沿ってレイヤーし、互いにブロックすることができます。
背景は、プレーヤーから最も遠いゼロのレイヤーに帰属する必要があります。 ゲームの設定では、背景画像をオフにしたため、背景は均一に黒になりました。 次の層は惑星とロジェリアです。 次に-バレルとmet石。 したがって、図は、一部の樽がロジェリアの一部を覆い隠していることを示しています。 次のレイヤーには、トランクと海賊船、次にWMDピクトグラム、プレイヤーの船、射撃、そして最後にプレイヤーに最も近い情報レイヤーがあります。ゲームのメッセージとダイアログは他のすべてのレイヤーを閉じます。
キーボードのファンクションキーを使用して、ゲームを保存およびロードできます。 そのため、保存すると、システムの名前を示すダイアログが画面に表示されます。この場合、「Tortugats System」があります。 そのような保存がすでに行われている場合、次の番号が保存名に追加されます。 保存されたゲームは、同じ名前でファイルに書き込まれ、ゲームの内部暗号化形式で拡張子「.sav」が付けられます。 ダイアログをトリガーするには、キーボードのEnterキーを押します。

ボットにとって非常に重要な機能は、現時点でのゲームのダンプです。CtrlキーとShiftキーを押しながらキーボードで「MAKEDUMP」と入力すると、通常のゲームを保存するときと同じようにダイアログが表示されます。 ただし、Enterキーを押すと、拡張子が「.sav」のファイルだけでなく、拡張子が「.txt」のテキストファイルも同じ名前で取得されます。 ファイルにはツリー構造があり、ネストされたブラケットを使用して記録されます。これには、プレイヤーの船とそれによってアクティブにされたトランクに関する多くの必要な情報が含まれています。 残念ながら、そこにはいくつかの必要な情報がありません。 特に、胴体の摩耗はゲームの現実に対応していません。 各バレルの画面座標が表示されますが、ロジェリアの座標とアクティブなトランクはありません。 ボットは、コンピュータービジョンを使用してこの情報を取得する必要があります。 これについては以下で説明します。ダンプを終了するために、ファイルの命名に関する簡単なトリックに注目します。ゲームの保存フォルダーに「System Tortugatsdmp.sav」および/または「System Tortugatsdmp.txt」という名前のファイルがあるかどうかを確認します。その後、削除します。 必要なダンプの名前に、キーボードのキーストロークをシミュレートするボットは、ゲームのダイアログに「dmp」を追加します。 したがって、ボットはゲームが書き込みを行った後、どのファイルを読み取る必要があるかを認識しています。このため、ボットはファイルへのアクセスを待機しています。 約9 MBのテキストが人間の観点から非常に迅速にディスクに書き込まれますが、プログラムの観点から即座に書き込まれるわけではないことに注意してください。したがって、ボットの誤動作を回避するために、このような競合はすべて予測する必要があります。
また、ゲームが提供することに注意する価値があります:各動きが「TurnSave.sav」ファイルに保存される設定と、クイック保存のためのホットキー、クリックすると、ゲームファイル「QuickSave.sav」がダイアログなしで記録され、それに応じて、クイック保存ロードキー。yes/ noダイアログに対する肯定的な回答をロードする必要があります。 ボットの他の便利な機能の数は、その説明で以下に注意してください。 そして、ここでは、ゲームのファイルシステムに関する会話を終了するために、ゲームのファイルシステムでのアクションにボットの顕著な待機時間がかかることに注意します。 ダウンロード後、ファイルは無料になる場合がありますが、ゲームをアクティブにするには、情報を処理するのにさらに時間がかかります。 基本的なファイル操作の場合、ゲーム画面は進行状況インジケーター付きのスプラッシュ画面(「温度計」)に置き換えられます。 ファイル書き込みエラーなどの例外が発生する可能性があります。 ゲームのバグに起因する他のクラッシュの可能性があります。 これはすべて、ボットに客観的な複雑さと不確実性を追加します。 明らかに、ゲームがプログラム間相互作用の手段、たとえばCOMを使用した場合、これらの困難はありませんでした。 したがって、ゲームにはボト構造用のデバイスがなく、ゲームの側面からのボットは基本的にチューリングリバーステストに合格する必要があります。 ゲームのために人間のプレーヤーと見分けがつかないようにする。
一見、説明したゲームはあまり面白くないかもしれませんが、上記のレコードテーブル(200以上のレコードを含む)から判断すると、ゲームが一定の成功を収めていることを認めなければなりません。 説明は、ゲームが単純ではなく、プレイヤーが忍耐強く、正確で、注意深いことを要求していることを示しています。 明らかに、そのようなタスクは、誰もプレイせず、AIの研究専用に作成された人工実験用ゲームよりも、ボットを作成するのにはるかに興味深いものです。 この記事の目的はゲームについて議論することではないことに注意してください-そのような議論は以前に行われました。 ここでは、ゲームのフェーズの1つでボットの動作に影響する特定の機能のみが示されています。 したがって、上記の簡単な説明は、ゲームの指示のふりをすることはできません。
問題と解決策
上記では、すでに多くの問題を指摘しています。 ゲーム自体はターンベースの戦略であり(ここでは惑星やアーケードの戦いについては説明しません)、Windowsはリアルタイムシステムではないにもかかわらず、本質的には、ボットはリアルタイムプログラムの手法を使用する必要があると結論付けることができます。 さらに、ボットはコンピュータービジョンを通じてのみ必要な情報を取得し、ゲームのスクリーンショットから情報を認識できます。 (たとえば、ArtMoneyや同様のツールを使用して、ゲームのRAMにアクセスしたり、ファイルを保存したりするための代替のハッカー方法は考えません。スポーツだけでなく、面白くないからです。より)。
ロジェリアが円軌道で星の周りを回転することは既に述べたので、飛行中の海賊が船の大量破壊兵器の破壊ゾーンにいるように、プレイヤーの船はそれに従う必要があります。 ホイールランディングと呼ばれるあまり知られていない戦術があります。 ベースには車輪を連想させるパーツがあります-なぜ彼らはとても巨大な宇宙装置であるのか、推測することしかできません。 「ホイール」を「クリック」して移動すると、Rozhderiyaへの着陸は発生せず、船は「ホイール」に固定され、次の各ターンは基地をたどります。

前の図とは異なり、ここでのゲーム設定では、スペースの背景は削除されません。
車輪に着陸する前述の方法は、ゲームの時間を大幅に節約しますが、ロジェリアから離陸する一部の海賊は、プレイヤーのWMD敗北ゾーンを離れることができます。 船が各ターンをロジェリアの幾何学的中心より上にある場合(「上」-ゲームワールドの第3次元のレイヤーで行われた発言を考慮して)、より多くの経験とポイントを得ることができます。
船体の強度とロジェリアから離陸する海賊の装備は毎日ランダムに変化します。 ゲームのチャンピオンは、あなたがトランクと「話す」と、空飛ぶ海賊の変化が起こることを発見しました。 「T」キー(会話)を押して、マウスカーソルをトランク上に移動し、マウスの左ボタンを押します。このトランクのタスクを選択できるモーダルダイアログが開きます(「フォローミー」、「戻る」、「物事の収集を続行する」など)。コマンドを選択せずにEscキーを押すと、ダイアログが閉じますが、高騰する海賊の構成は異なります。別のそのような空の話は再び高騰する海賊の構成を変更します。したがって、最大スコアを得るには、1、2、3などを費やすようにしてください。トランクとの会話、毎回前の動きに戻り、ゲームのダンプから決定される最大の経験を得ることが可能であった場合を選択します。
既に述べたように、ダンプにはベース座標とトランクはありませんが、ロジェリアの中心より上にあり、トランクを引き起こすには、それらを知る必要があります。ボットでこれらの座標を見つけるには、OpenCVコンピュータービジョンライブラリの関数が使用されます。
ボットは、ゲームのホットキーを押すことを模倣して、画像を中央に配置します。その結果、プレイヤーの船は画面の中央に配置されます。以前の動きでは、船はロジェリアからそれほど遠く離れていなかったと想定しています。ただし、エラーを回避するために、ボットは引き続きフルスクリーン画像で動作します。次に、ボットはクイック保存を行い、画面からWMDマークを削除します。ロジェリアは、まったく回転せずに星の周りを飛び回り、スプライトは十分に大きいため、下のテンプレートで十分に認識されています。バレルとミネラルは、それらの(一見任意の)軸の周りで回転します。このゴミは、トランクのサイズに比例し、トランクの認識を妨げます。したがって、ボットはゲームを使用して、4秒間隔で2つのスクリーンショットを取得し、それらをダウンロードして、テンプレートに従って最初にロジェリアで見つけ、ピクセルごとに追加します。

(サイズ:100 x 93)
回転する破片が汚れている。さらに、Rogeriaの参照画像(破片なし)と各色成分が20ユニット(実験的に選択された値)を超えて異なるRGBモデルのすべてのピクセルが黒くなります。したがって、結果の画像からロジェリアが削除されますが、部分的にそれを覆う可能性のあるより近いレイヤーのオブジェクトが残ります。さらに、ボットは画面の中央に中心を持つ700 x 700ピクセルの正方形をカットし、さらにパラメーターCV_GAUSSIAN、9、9(実験的に選択)でOpenCV cvSmooth関数を使用してこの画像をぼかし、トランクの認識に進みます。
Rogeriaとは異なり、トランクは45度の倍数の角度で回転させることができ、cvMatchTemplateテンプレートで使用されるOpenCV認識機能は回転に対して不変ではありません。そのため、8つの可能なパターンに従ってトランクを順番に探します。

残念ながら、この段階では、ゴミはトランクと混同される可能性があるため、見つかったオブジェクトごとに類似性の尺度が追加で決定されます。同様のピクセルとは、RGBモデルの各色成分について、テンプレートの対応するピクセルと45ユニットを超えて違いがなく、18ユニットを超える輝度を持つピクセルです。これにより、認識されたトランクが重なる可能性のある灰色の破片がなくなります。類似度は、テンプレート内のすべてのピクセル数に対する類似ピクセル数の比率として計算され、100%が乗算され、最も近い整数に丸められます。
次の図は、説明した方法で認識された画像を示しています。認識領域は大きな赤い正方形で囲まれ、10%を超える類似性基準を持つトランクとして認識されたオブジェクトは赤い長方形で囲まれます(中心は小さな正方形で示されます)類似性の尺度の基準-青い長方形。数字は類似性の尺度です。
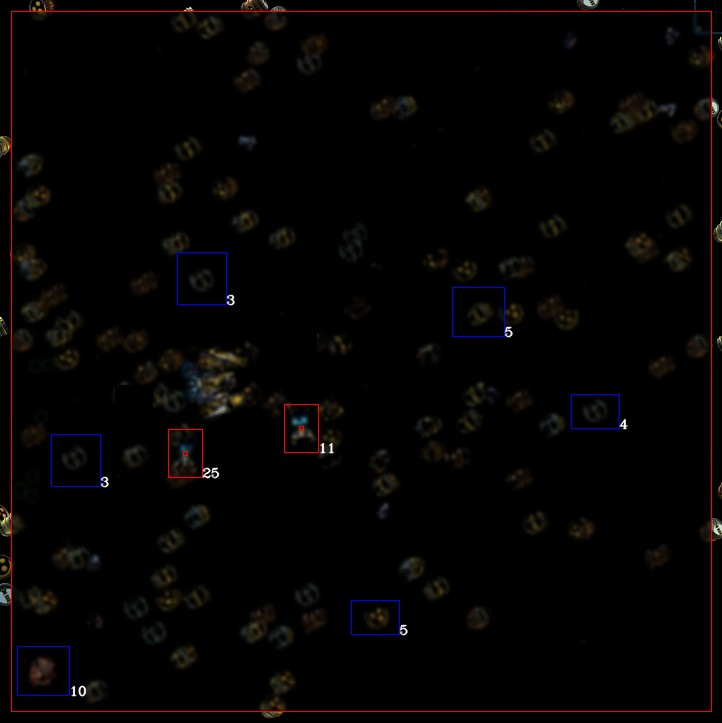
残念ながら、テストでは、このような多段階の認識を行い、その後に改良を加えても、エラーが発生することがあります。したがって、見つかったオブジェクトのリスト(おそらくトランク)は、ゲームによって最終的にチェックされます。各トランクは会話のために呼び出されます。これが実際にトランクである場合、次のモーダルダイアログがゲーム画面の右上隅に
表示されます:このダイアログは、テンプレートによって自信を持って認識されます:

説明された方法で、しきい値80%での類似度の計算。オブジェクトがトランクではない場合(および海賊ではない場合、以下を参照)、ダイアログは表示されず、碑文は画面上部の「トークは不可能です」に表示されます。碑文はすぐに消え、それを認識するために何もする必要はないようです。
大量のガベージでは、指定されたオブジェクトのいずれもトランクとして応答しない状況が発生します。この場合、見つかったオブジェクトはすべて黒で塗りつぶされ、トランクの検索が新たに試行されます。この実験は、場合によってはこれが役立つことを示しています。それが役に立たないときは、もう一度2つのスクリーンショットを撮り、認識手順全体を繰り返すことができます。これが役に立たなかった場合、ボットはその無力さを認め、プレイヤーに助けを求めなければなりません。テストでは、このような状況はまれにしか発生せず、ゲーム内の船やトランクの修理作業が必要なためにボットが停止することが非常に多いことが示されています。
燃料バレルはトランクの認識を妨げるだけでなく、ゲームの望ましいコースに直接的な脅威をもたらします。たくさんの樽が溜まると、そのうちの1つがショットから爆発し、隣接する樽の爆発を引き起こします-雪崩のような成長で連鎖反応が起こります。その結果、バレルの数は急激に減少しますが、爆発によりトランクが破壊され、保護が不十分な場合、プレイヤーの船が損傷する可能性があります。これが発生するコースを正確に予測することは不可能であるため、トランクが失われた場合、プレイヤーは爆発とリプレイの数日前にゲームを保存するために戻る必要があります。さらに、ボットがプレイしているとき、樽がプレイヤーの船にキャプチャされることがあります。したがって、ボットが停止したら、プレイヤーは樽を宇宙に投げ入れるためにホールドを検査する必要があります。
ゲーム中に、プレイヤーを脅かす海賊が現れることがあります。この場合、トランク付きのダイアログに似ていますが、テキストが異なるモーダルダイアログが開きます。テキストが異なるという事実にもかかわらず、トランクを備えた認識ダイアログテンプレートは、この場合に適しています。類似度の設定値は大きすぎません。各ターンのボットは、そのようなダイアログについてゲームのスクリーンショットをチェックし、検出された場合、Escキーを押してダイアログを閉じることをシミュレートします。そうしないと、ボットのさらなる操作が不可能になります。また、一部の海賊船は、ボットに認識されると、トランクのように見える場合があります。この場合、オプションを検索するときに、ボットは海賊にトランクのように話しかけることができます。
場合によっては、Escキーを押すシミュレーションが不要で、画面の中央にゲームのメインメニュー(モーダルダイアログ)が表示されることがわかりました。ボットは、スクリーンショットの次のパターンを認識して、Escキーを押す各シミュレーションの後にそのような状況をチェックし

ます。メインメニューを閉じるには、ボットはEscキーを押すシミュレーションを繰り返す必要があります。
テスト移動を行った後、ボットはロジェリアを表す長方形の中心の座標を決定し、移動を返し、このポイントでコースをプロットしようとします。ただし、トランクまたは海賊はこのポイントに近い場合があり、プレイヤーの船は指定されたポイントではなくトランク(または海賊)の後ろを飛行するため、ボットは別のオプションを試みます-船が同じ場所に留まる移動を行います。その後、ボットはこれらのオプションを比較し、船の中心からロジェリアの中心までの距離が短い方を選択します。
合理的なボットを作成するという目標を設定したら、次のように独立性を制限します。ボットは動き、機器の消耗と監視中のトランクの安全性を監視します。 0、1、2などのオプションを個別に試行します。トランクとの会話と最大の経験を持つオプションを選択します。 WMDの摩耗を監視します。ただし、プレイヤーにWMDの交換と機器の修理を提供します-WMDの変更、スロットへのnanikのインストール、またはホールド内のnanikの取り外しのためにプレイヤーの介入が必要な場合、ボットは停止します。また、観察中のトランクが死亡した場合、ボットは停止します。そのため、プレーヤーは帰国日を選択し、トランクをさらに保護するための対策を講じます(たとえば、トランクに追加の保護アーティファクトをインストールするか、このトランクを数日間ターゲットとして使用しなくなります)。純粋に技術的には、これらの操作は自動化することもできますが、決定があいまいな状況が多くあります。私の意見では、プレイヤーが自分でこれらの決定をする喜びを奪うべきではありません-さもなければ、ゲームはプレイヤーの興味を完全に失います。ボットがゲームの中で最も疲れる日常的な部分を実行するようにし、プレイヤーが最も面白くて負担の少ない部分であるようにします。これらの決定を自分で行う喜びをプレーヤーから奪わないでください。そうしないと、ゲームはプレーヤーの興味を完全に失い、その理由はボットになります。ボットがゲームの中で最も疲れる日常的な部分を実行するようにし、プレイヤーが最も面白くて負担の少ない部分であるようにします。これらの決定を自分で行う喜びをプレーヤーから奪わないでください。そうしないと、ゲームはプレーヤーの興味を完全に失い、その理由はボットになります。ボットがゲームの中で最も疲れる日常的な部分を実行するようにし、プレイヤーが最も面白くて負担の少ない部分であるようにします。
修理のために機器を追跡するタスクはボットのプログラミングにとっては簡単に思えますが、問題はここにあります。ゲームダンプでは、船のスロットに取り付けられ、船倉にある機器とアーティファクトは区別できません。したがって、ボットは、摩耗が特定の制限値に達すると、監視中の機器の摩耗についてプレーヤーに警告し、この機器を記憶し、保管された機器の摩耗が機器が修理できなくなるポイントまで低下した場合にプレーヤーに通知します。前者の場合、プレイヤーは船倉のトランクまたはトランクのスロットにがらくたを入れなければなりません。後者の場合、反対の操作を行います。
GUI
ボットウィンドウのメインタブを次の図に示します。

ボットは2つのモードでプレイできます。フル機能モードと、機能が制限された高速モードです。モードの選択は、トランクとの会話の数、つまり「会話」フィールドによって決まります。この数値がゼロより大きい場合、ボットは最初のテスト移動を行い、前日に戻り、会話のためにアクティブなトランクの1つを呼び出し、ダイアログを閉じて移動し、再び前日に戻り、再びトランクと話します。そして何度も、「会話」フィールドに表示される会話の数。行われたすべての試みのうち、最大の経験をもたらしたものが選択されます。
加速モードでプレイするには、前述のように、ホイールに着陸して船をロジェリアに「固定」する必要があります。このモードでは、ボットはベースとトランクを認識する必要がないため、各ターンでスクリーンショットが作成されるため、通過速度が大幅に向上し、エラーの数が大幅に削減されます。監視対象のすべての低レベルの摩耗でさらに速く通過するために、ボットは毎日ゲームをダンプすることはできません。「分析頻度」フィールドでダンプの頻度を設定できます。摩耗がクリティカルに近づくと、ボットは毎日のダンプ分析に切り替わります。
既に述べたように、ボットがゲームで適切に機能するには、適切な設定を行う必要があります。そのため、最初の起動時に、ボットはダイアログでゲーム構成ファイルに必要な変更を加えることを提案します。プレーヤーが同意すると、ボットはCFG.TXTゲーム構成ファイルをCFG.BAKファイルにコピーし、CFG.TXTファイルに必要な変更を加えます。前の設定に戻るには、プレーヤーはボットを起動し、「CFGファイルを返す」ボタンをクリックする必要があります。ボットはCFG.TXTファイルを削除し、CFG.BAKファイルの名前をCFG.TXTに変更します。ボットが次に起動するときに、CFG.BAKファイルが見つからず、ゲームの構成ファイルに必要な変更を加えることを提案します。
学習、自己学習、自己知識
AIは、学習、特に自己学習に大きな期待を寄せています。 この点で、よく知られている事実を思い出してみる価値があります。自然知能の向上に伴う状況は何ですか-まず第一に、子供の教育に。 それは穴居人の時代から普遍的であり、キプリング・モーグリのヒーローでさえジャングルの本を読むように教えられています。 さまざまな分野の多くの修士と優秀な専門家が生涯を研究していますが、それでも多くの大人にとって、教育は子供にとって必須であると考えられているため、必須ではありません。 この点で、独学の役割を過小評価せずに、伝統的にすべての人々が教育と、「やる」などの厳格なモーダル教育に焦点を合わせていることを認めなければなりません。 だから基本的に、両親、教育者、学校の先生は、「食べる前に手を洗ってください」、「爪を噛まないで」、「拳でスプーンを持ってはいけない」、「鉛筆のようにはんだごてを持ってはいけない」、「明日は延ばさないで」あなたは今日それを行うことができます、「」旋盤でネクタイで作業することはできません-それを巻き上げ、絞め殺すことができます、「」あなたは彼らがあなたとやりたくないように他人を扱わないでください」など この場合、根拠はオプションです。 確かに、食べる前に手を洗う必要がある理由を子供に説明することはできますが、握りこぶしを握る方が便利なため、握りこぶしにスプーンを入れられない理由を説明するのははるかに困難です。 各生徒は、機械の可動部分がネクタイを巻くことができることを理解しますが、ネクタイは短くすることができ、ピンで長くすることができるなどと言う討論者がいます。 教師とインストラクターの標準的な行動方針は、こうした論争を避けることです。「これらは安全上の要件であり、議論されていません。」
幼年期の教育における独学は、通常二次的な役割を与えられます。 もちろん、才能のある子供もいますし、興味のある生徒が学校のカリキュラムに含まれていないことを本から独立して学ぶ場合も多くあります。 ただし、このような場合は、一般的な規則から、非常に多数ではありますが、通常は例外と見なされます。 通常、このような自己訓練の結果として学生が得た知識は表面的で体系的ではなく、理解できない場合や理解できない場合は誤っていることがあります。 明らかに、十分な教育を受けた成人の場合、独学は通常はるかに実り多いものになります。
そうは言っても、完全に自己学習するAIプログラムのアイデアは疑わしいようです。 現在、私たちは初等教育の原則の一つのシステム、つまり子供の教育を非常によく知っています。 したがって、これらの原則をAIに適用する以外に選択肢はありません。 そして、特に、オプションの学習を伴う教師によるモーダル教育の有名な原則。 実際、モーダル学習は「この方法で行う」ことは、対象分野の行動規則をプログラミングすることと変わりません。 ここで説明するボットの場合、ゲーム中に発生する問題を解決するための上記の規則は、プログラムコードの形で縫い付けられています。 このコードのテスト中に、例えば類似性の尺度のしきい値などのパラメーターが調整されます。
問題のリストを続けて、射撃の問題について説明します。スペースバーを押した後、ゲームが動き、海賊船の別のバッチがロジェリアから離陸し、プレイヤーの船の銃が射撃し、すべての煙が下にあります。 ボットがスペースバーを押した後(ゲームコマンド「make a move」)。

このような画像は認識に適していません-煙が拡散するのを待つ必要があり、オブジェクトが動きを停止します。 この一時停止を最小限に抑えるには、Rogeriaボットタブを使用します。
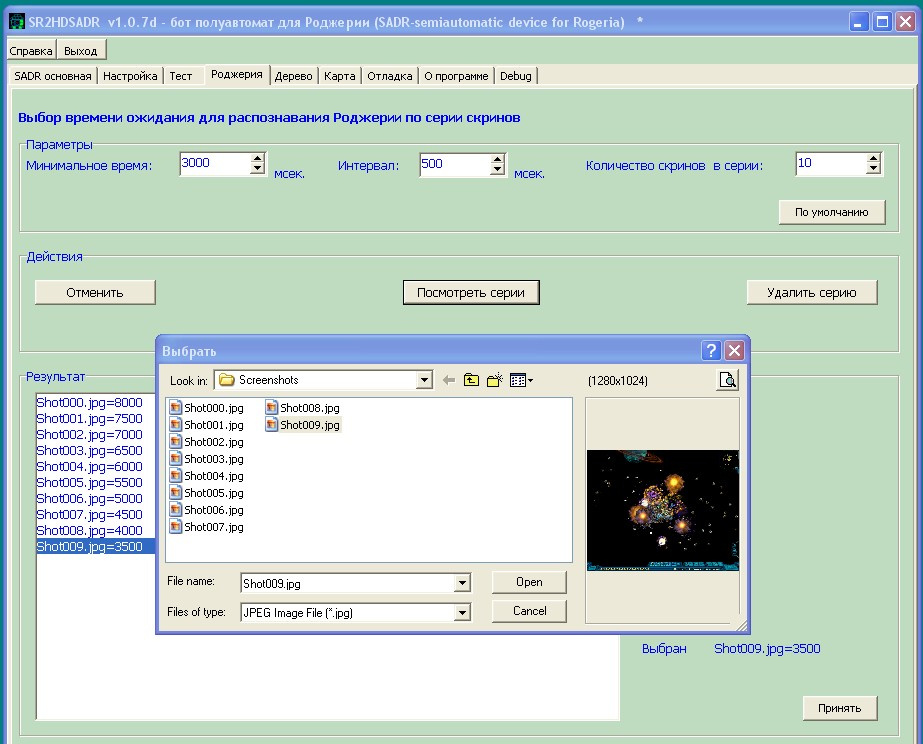
[シリーズの作成]ボタン(ボタンのラベルが[キャンセル]に変わります)をクリックすると、ゲーム画面に移動してF10キーを押すように促すメッセージが表示されます。 ボットは、プレーヤーが指定したパラメーターに対応する遅延で、一連のスクリーン写真(「スクリーンショット」)を撮ります。 次に、プレーヤーはこのシリーズを表示し、許容可能な一時停止を選択します。 (図では、ファイル名の後ろの「結果」フィールドに、ミリ秒単位の一時停止値がセパレーター「=」を介して書き込まれます。)
これに関連して、興味深い理論上の疑問が生じます。記述されたプロセスを学習と呼ぶことができますか? そうでない場合、「食前の私の手」という子供に対する教育者のモーダル順序は、「移動後、4秒間停止する」というプレイヤーのボットの順序とは本質的に異なります。 そしてスクリーンショットを撮った後にだけ?」
一時停止の選択は、たとえば次の自己学習シナリオによって完全に自動化できます。最初に、ボットは明らかに過大評価された一時停止を設定し、認識結果が急激に低下するまでそれを減らします。 おそらく、この解決策は誰かにとってより美しいように見えるかもしれませんが、私の意見では、これは役に立たない装飾になるでしょう。 一時停止を設定したのは1回だけですが、ビデオカードなどの環境を変更する場合、このパラメーターを変更する必要があると想定できます。
合理的なボットの要件にはユーティリティが含まれると上で述べました。 ゲームの実行が遅すぎる場合、ボットが実際に役立つとは考えにくいため、すべての一時停止は可能な限り最小限に抑えられました。
また、自己認識(内省)についていくつかの言葉を言う価値があります。 その克服できない難しさは、自然知能の限界の最も明確な例の1つです。 直観主義A. Bergsonの哲学の有名な創始者は、人は手をあげることができるが、それをどのように行うかを説明できないと指摘した。 後に、定理を自動的に証明するシステムに取り組んでいる間に、研究者は逆説的な事実に出くわしました。数学者は、これらのシステムの実装に必要なだけ定理を証明する方法を説明できません。 人々が意識的な年齢で数学を勉強し、一歩一歩学習できるという事実は、彼らが数学をどのように勉強したかを教えてくれます。 音声と視覚画像の認識の状況はさらに複雑に思えます-彼がこれをどのように学んだかは誰にもわかりません。 したがって、自然な知能の限界は、AI音声認識、視覚画像、定理の証明などを教えることの難しさに現れています。
まれで例外的な状況の処理
比較的まれにしか発生しない状況が上記で指摘されました。たとえば、トランクが見つからなかった、メインメニューへの移行などです。 このような状況は、例外的な状況と区別する必要があります。 ウィキペディアによると、例外はかなり厳格な概念であり、
プログラムの実行中に発生し、プログラムによる基本アルゴリズムのさらなる開発が不可能(無意味)になる可能性のあるランタイムエラーおよびその他の考えられる問題[...]例外処理メカニズムは、コンピューティング環境に組み込まれています。 また、例外の頻度が指定されていないことにも注意してください。原則として、例外は非常にまれです。
まれな状況はそれほど厳密ではなく、ヒューリスティックな概念であり、対象領域とモデリング環境(この場合はゲーム)に完全に依存しています。 上記の例からわかるように、すべてのまれな状況が、プログラムによる基本アルゴリズムのさらなる開発の不可能または無意味につながるわけではありません。 たとえば、バレルの船の捕獲は、ボットの即時応答を必要としません。 提案されたソリューションでは、プレイヤーは偶発的に捕獲された樽から免除され、原則として、都合の良い時間に解放することができます。 修理、大量破壊兵器の交換などのための次のボット停留所で プレイヤーがすべてのバレルをキャプチャ用にマークした場合、次のターンで彼の船が過負荷になる可能性がありますが、ボットの実際のゲームでは、そのような状況はありそうにないようです。
一般的な場合、自明ではないタスクの最も徹底的な分析でさえ、まれな状況の特定を保証するものではないことを認めなければなりません。 これらの考慮事項は、上記の完全な自律性に疑問を追加します。 合理的なアプローチでは、まれな状況は人間によって処理されます。 最近、スーパーマーケットの噴水でrobot死したロボット警官に関するメッセージが大きな反響を引き起こしました。 この「自殺」の理由は、原因不明のまれな状況だったと思います。
実装、経験的アプローチ
1976年、ニューリング(A.ニューウェル)とサイモン(HAサイモン)は、チューリング賞のプレゼンテーションで、「コンピューターサイエンス-実験科学」のテーマについて講演しました。 それらに続いて、J。F.ルーガーは述べた:
各AIプログラムは実験と見なされる必要があります。それは自然の前の問題であり、その答えはプログラムの結果です。 置かれた設計とプログラムの原則に対する自然の反応は、形式主義、パターン、思考の本質の理解を形成しますパラメーターの決定に対する実験的アプローチだけでなく、方法の選択も上記で繰り返し指摘されました。たとえば、実験では類似性の尺度を使用する必要があることが示されました。 実際、主なバグのプログラミングとキャッチには非常に短い時間(合計時間の約10%)しかかかりませんでした。これは、主にボットがKR2HDで船体を生成するために以前に作成したボットの再設計プログラムに基づいているためです。 ほとんどの時間は、実際のゲームに合格し、この通過中にボットを調整することに費やされました。 オペレーターの継続的な関与を必要としない長期タスクのように、リアルタイムコストをかけた場合、それらは小さくなります-ボットが1台のコンピューターでゲームをプレイしている間、近くの別のコンピューターで他のことを行うことができます。 停止すると、ボットからビープ音が鳴ります。 プレーヤーの利便性のために、ボットを使用する場合、ボットが停止したときに実行を開始するプログラムをボット設定で指定できます。 たとえば、プレーヤーが別の部屋にいる場合のプレーヤーの電話プログラムです。 さらに、コンピューターをオフにするオプションがあります。停止すると、ボットはゲームを保存し、コンピューターをオフにします。
(J. F.ルガー、人工知能:複雑な問題を解決するための戦略と方法。第4版。M:ウィリアムズ、2003年、S。780) 。
ゲームと以前のボットはDelphi-7で記述されており、コードを再利用するために、このボットにも同じ環境が選択されました。 前述のOpenCVに加えて、 Delphi-OpenCVライブラリ(Laentir Valetov、Mikhail Grigorev)、 TntWare Delphi Unicode Controls (Troy Wolbrink)、およびInno Setupインストーラー(Jordan Russell)が使用されました。 ボットは、Windows XP SP3、Windows 8.1、およびWindows 10でテストされました。ゲームのバージョン2HD2.1.2155および2.1.2170。 実際のゲームでのテストには約12ゲーム年かかり、前述のレコードのロジェリアの戦いの期間を超えていますが、もちろん、レコードの表では、この戦いが長く続いたゲームを見つけることができます。 これらのテストの印象によると、ボットは成功しました。 合理的なAI(上記を参照)の目標を達成することが可能でした-「自律レベルを選択する」:
1) 「プログラムは役に立つ」 -数か月間、海賊を暴行するよりもずっと面白いことをするのではなく、ゲームに一定の存在感を感じ、定期的にボットを信用していない興味深いゲームの決定をすることで、利益を感じました。
2) 「プログラムは人間と比べて頻繁にミスを犯しません」 -実際、エラー率は許容できるレベルまで低下しました。私の意見では、1時間に1回、時にはそれ以上です。 同時に、より長くより徹底的なデバッグを行うことで、プログラムのエラーのない操作の期間を延長できることを認めます。
3) 「プログラムの作成、デバッグ、および保守が過度に複雑になることはありません」 -特別な問題は発生しませんでした。 いずれにしても、上記の惑星戦のボット(PB-bot)と比較しないでください。 彼はいくつかの成功を見せましたが、私を含め誰も彼を昇進させることができませんでした。
おわりに
ゲームプログラミングは、伝統的にAI開発の最も重要な分野の1つと考えられています。 この方向では、ゲーム用のプログラミングボットのサブ方向を区別できます。ボットバグをゲームの蟻塚に入れて、何が起こるかを確認します。 「なぜこれが必要なのか」という質問に答えるには、モデルアプローチの観点から現代の自然科学と人道分野(たとえば、長編映画や文学)を検討する価値があります。 科学理論、映画、ゲーム-モデルの本質であり、いくつかの一般原則を探ることができます。 特に、例えば、自律性の程度の合理的な選択の原則は、ここで提案されたボットモデルから続きます。これは、私の意見では、例えば、前述のロボット警官のようなおもちゃではないアイテムの噴水での自殺を防ぐのに役立つかもしれません。
より複雑なモデル、たとえば、より複雑なゲームやこのゲームのより難しいタスクは、より興味深い結果をもたらすと思われるかもしれません。 ただし、そのような研究では「より複雑-より良い」という原則は常に正当化されません-多数のパラメーターを持つ多数のルールに基づく過度に複雑なモデルは、多くの場合、森林が木の後ろに見えない状況につながります。 したがって、前述のPBボットは、より複雑なタスクを指向しており、このような興味深い観察を行うことはできませんでした。
結論として、ゲームの戦術、ボットのアイデア、およびボットの初期バージョンの予備テストについて話し合ったSvyatoslavに感謝するとともに、ゲームの戦術について話し合ったRobo Brainに感謝することは、私にとって嬉しい義務だと思います。 TPチャートを処理してくれたvconstに感謝します。