 この記事は、私の著書 『Manning Publications』の第9章のセクション2および3を修正したものです。
この記事は、私の著書 『Manning Publications』の第9章のセクション2および3を修正したものです。
この記事は、ディープラーニングの経験が豊富な人(たとえば、この本の1〜8章をすでに読んだ人など)を対象としています。 大量の知識が想定されています。
深層学習の制限
深層学習:幾何学的ビュー
ディープラーニングで最も驚くべきことは、それがいかに単純かということです。 10年前、勾配降下で訓練された単純なパラメトリックモデルを使用して、機械の知覚の問題でどのような驚くべき結果が得られるか想像できませんでした。 ここで、 十分な数のサンプルでトレーニングされた十分に大きなパラメトリックモデルのみが必要であることがわかりました。 ファインマンが宇宙についてかつて言ったように、「 それは複雑ではなく、たくさんあります。」
深層学習では、すべてがベクトル、つまり幾何空間の ポイントです。 モデルの入力データ(テキスト、画像など)とその目標は、最初に「ベクトル化」されます。つまり、入力で初期ベクトル空間に、出力でターゲットベクトル空間に変換されます。 深層学習モデルの各層は、通過するデータの1つの単純な幾何学的変換を実行します。 モデルレイヤーチェーンは、非常に複雑な幾何学的変換を作成し、一連の単純なものに分解します。 この複雑な変換は、各ポイントについて、入力データ空間をターゲット空間に変換しようとします。 変換パラメーターは、レイヤーの重みによって決定されます。レイヤーの重みは、現在のモデルの動作状況に基づいて絶えず更新されます。 幾何学的変換の重要な特徴は、 微分可能でなければならないことです。つまり、勾配降下によってそのパラメーターを知ることができる必要があります。 直感的に、これは幾何学的なモーフィングが滑らかで連続的でなければならないことを意味します-これは重要な制限です。
この複雑な幾何学的変換を入力データに適用するプロセス全体を3Dで視覚化することができ、紙のボールを展開しようとしている人を描いています。紙のしわは、モデルが動作を開始するさまざまな入力データです。 紙のボールを持った人の各動きは、単一のレイヤーが実行する単純な幾何学的変換のようなものです。 展開するジェスチャの完全なシーケンスは、モデル全体の複雑な変換です。 ディープラーニングモデルは、複雑な多様な多次元データを展開するための数学的なマシンです。
これは深層学習の魔法です。値をベクトルに変換し、幾何学的な空間に変換してから、ある空間を別の空間に変換する複雑な幾何学的変換を徐々に学習します。 必要なのは、ソースデータで見つかった関係のスペクトル全体を伝えるのに十分な大きさの空間です。
深層学習の制限
この単純な戦略を使用して解決できる一連のタスクは、ほぼ無限です。 それでも、それらの多くは、手作業で注釈付けされた膨大な量のデータが存在するにもかかわらず、現在のディープラーニング技術の範囲を超えています。 たとえば、製品マネージャーが作成したソフトウェア機能の数十万から数百万もの英語データセットのデータセットと、これらの要件を満たすためにエンジニアのチームが開発した対応するソース年を収集できるとします。 このデータを使用しても、製品の説明を読んで適切なコードベースを生成するだけで、ディープラーニングモデルをトレーニングすることはできません。 これは多くの例の1つにすぎません。 一般に、議論や推論を必要とするものすべて-プログラミングや科学的手法の適用、長期計画、アルゴリズムスタイルでのデータの操作など-は、どれだけ多くのデータを投入しても、ディープラーニングモデルの機能を超えています。 ソーティングアルゴリズムでニューラルネットワークをトレーニングすることさえ、非常に困難な作業です。
その理由は、深層学習モデルは、 1つのベクトル空間を別のベクトル空間に変換する単純で連続的な幾何学的変換のチェーンのみであるためです。 彼女ができることは、学習可能なXからYへの連続的な変換が可能であり、 X:Y変換パターンの密なセットがトレーニングデータとして利用できる場合、Xデータのセットを別のセットYに変換することです。 したがって、ディープラーニングモデルは一種のプログラムと見なすことができますが、 ほとんどのプログラムはディープラーニングモデルとして表現することはできません -ほとんどのタスクでは、問題を解決する実際に適切なサイズのディープニューラルネットワークが存在しないか、存在する場合は訓練されていない 、つまり対応する幾何学変換が複雑すぎるか、トレーニングに適したデータがありません。
既存のディープラーニングテクニックをスケールアップする-レイヤーを追加し、学習にデータを使用する-は、これらの問題の一部を表面的に軽減するだけです。 ディープラーニングモデルは表現できるものが非常に限られており、ほとんどのプログラムはデータの多様性の連続的な幾何学的モーフィングとして表現できないという、より根本的な問題を解決することはできません。
機械学習モデルの擬人化のリスク
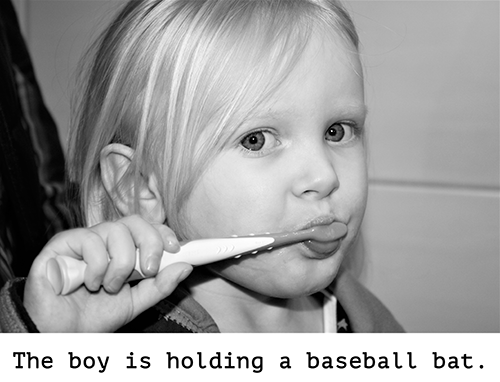
現代のAIの非常に現実的なリスクの1つは、ディープラーニングモデルの作業の誤解と、その能力の誇張です。 人間の心の基本的な特徴は、「人間の精神のモデル」であり、目標、信念、知識を周囲のものに投影する傾向です。 石に笑顔を描くと、突然「幸せ」になります-精神的に。 ディープラーニングに適用される場合、これは、たとえば、写真のテキスト記述を生成するためにモデルを多少成功させることができる場合、モデルは生成された記述だけでなく画像の内容を「理解」すると考える傾向があることを意味します。 その後、トレーニングデータに示された一連の画像からのわずかな逸脱により、モデルが完全に馬鹿げた記述を生成し始めると、非常に驚くことになります。
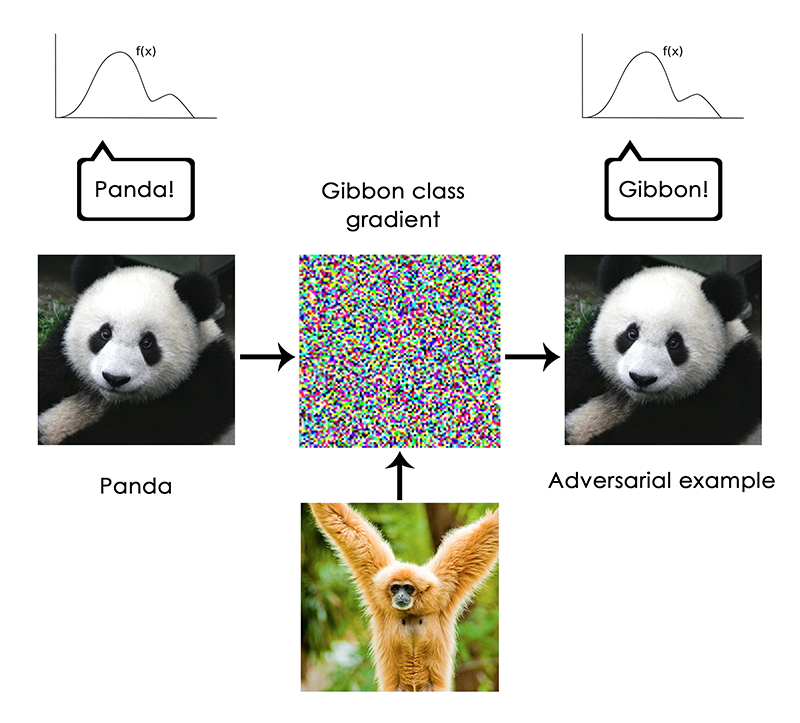
特に、これは「敵対的な例」、つまり、誤って分類されるように特別に選択された深層学習ネットワークの入力データのサンプルで最も明確に示されます。 一定の畳み込みニューラルネットワークフィルターなど、活性化を最大化するサンプルを生成するために、入力データ空間で勾配上昇を行うことができることは既に知っています-これは、第5章で説明した視覚化手法の基礎です(注:本「 Deep Learning with Python 」) 、および第8章のDeep Dreamアルゴリズムも同様です。同様の方法で、グラジエントクライミングにより、画像をわずかに変更して、特定のクラスのクラス予測を最大化できます。 パンダの写真を撮り、「ギボン」グラデーションを追加すると、このパンダをテナガザルとして分類するニューラルネットワークを作成できます。 これは、これらのモデルの脆弱性と、それによって導かれる入口から出口への変換と、私たち自身の人間の知覚との大きな違いの両方を示しています。
一般に、ディープラーニングモデルは、少なくとも人間の意味では、入力を理解していません。 画像、音、言語の私たち自身の理解は、人間としての感覚運動の経験に基づいています-物質的な地上の生き物として。 機械学習モデルはそのような経験にアクセスできないため、人間のような方法で入力データを「理解」することはできません。 モデルの多数のトレーニング例に注釈を付けることにより、この特定の例のセットの人間の概念にデータをもたらす幾何学的変換を学習するように強制しますが、この変換は、次のような経験に基づいて開発された、心の元のモデルの単純化されたアウトラインです身体のエージェント-それは鏡のかすかな反射のようなものです。

機械学習の実践者として、これを常に忘れずに、ニューラルネットワークが実行しているタスクを理解していると信じ込まないようにしてください。少なくとも私たちにとって意味のある方法では理解していません。 彼らは、私たちが彼らに教えたいものとは異なる、より狭いタスクで訓練されました:入力訓練サンプルから目標訓練サンプルへの単純な変換、ポイントツーポイント。 トレーニングデータとは異なるものを見せれば、最もばかげた方法で破壊されます。
局所汎化と限界汎化
入り口から出口への直接的な幾何学的なモーフィング、深層学習モデルが行うこと、および人々の思考と学習の方法には根本的な違いがあるようです。 ポイントは、人々が自分の体の経験から自分自身を学ぶだけでなく、一連のトレーニングサンプルを処理することではないということです。 学習プロセスの違いに加えて、基礎となる概念の性質にも根本的な違いがあります。
人々は、ニューラルネットワークや昆虫など、即時の刺激を即時の応答に変換する以上の能力を備えています。 人々は、現在の状況、自分自身、他の人々の複雑で抽象的なモデルを心に留めており、これらのモデルを使用して将来のさまざまな選択肢を予測し、長期計画を実行できます。 よく知られている概念を組み合わせて、たとえばジーンズで馬を描く、宝くじに当たったらどうするかのイメージなど、今まで知らなかったものを提示することができます。 仮説的に考える能力、精神空間のモデルを私たちが直接経験したことをはるかに超えて拡大する能力、つまり抽象化と推論を行う能力は、おそらく人間の認知の決定的な特徴です。 私はこれを「究極の一般化」と呼びます。これは、これまで経験したことのない新しい状況に適応する能力で、データをほとんど使用しないか、まったく使用しません。
これは、「ローカル一般化」と呼ばれるディープラーニングネットワークとは非常に異なります。新しい入力がトレーニング中に遭遇したものと少なくともわずかに異なる場合、入力を出力にすばやく変換することは意味をなしません。 。 たとえば、月に着陸するはずのロケットの適切な発射パラメーターを学習する問題を考えてみましょう。 このタスクにニューラルネットワークを使用し、教師または強化部で教える場合、数千または数百万の飛行経路を与える必要があります。つまり、入力値の空間から空間に確実に変換する方法を学ぶために、入力値の空間で例の密集したセットを提供する必要があります発信値。 対照的に、人々は抽象化の力を使用して物理モデル(ロケット科学)を作成し、数回の試行で月にロケットを届ける正確なソリューションを推測できます。 同様に、人体を制御するニューラルネットワークを設計し、車に衝突せずに街を安全に歩き回る方法を学習させたい場合、ネットワークはさまざまな状況で何千回も死ぬと、車が危険で動作しないと結論付けられます。それらを回避するための適切な動作。 新しい都市に移動した場合、ネットワークは彼女が知っていたことのほとんどを再学習する必要があります。 一方、人々は一度も死なずに安全な行動を学ぶことができます。これも、仮説的な状況の抽象的なモデリングの力のおかげです。

そのため、機械認識の進歩にもかかわらず、人間レベルのAIにはまだほど遠い状態です:モデルは、 局所的な一般化のみを実行でき、過去のデータに非常に近いはずの新しい状況に適応しますが、人間の心は究極の一般化 、完全に新しい状況への迅速な適応、または将来の計画。
結論
覚えておく必要があるのは、これまでのディープラーニングの唯一の本当の成功は、人が注釈を付けた大量のデータが存在する場合に、連続的な幾何学的変換を使用して、スペースXをスペースYに変換する能力です。 このタスクの優れた成果は、業界全体にとって革命的な成果を表していますが、それでも人間のAIとはかけ離れています。
これらの制限の一部を取り除き、人間の脳との競争を開始するには、入口から出口への直接変換から離れて、 推論と抽象化に進む必要があります。 おそらく、さまざまな状況や概念の抽象モデリングの適切な基盤は、コンピュータープログラムです。 先ほど(注:「 Pythonでの深層学習 」という本で)機械学習モデルは「学習プログラム」として定義できると述べました。 現時点では、可能なすべてのプログラムの狭い特定のサブセットのみをトレーニングできます。 しかし、各プログラムをモジュール式で繰り返しトレーニングできるとしたらどうでしょうか? どうやってこれに到達できるか見てみましょう。
ディープラーニングの未来
ディープラーニングネットワークの作業、その限界、および現在の研究状況について知っていることを考えると、中期的に何が起こるかを予測できますか? これについての私の個人的な考えのいくつかを以下に示します。 予測のための水晶玉がないため、期待することの多くが実現しない可能性があることに注意してください。 これらは絶対的な推測です。 これらの予測は、将来完全に実現されると予想されるため、共有しませんが、現在は興味深いものであり、適用可能であるためです。
高いレベルで、これらは私が有望と考える主な分野です:
- モデルは、現在の微分可能な層よりもはるかに豊富なプリミティブの上に構築された汎用コンピュータープログラムに近づきます。これにより、現在のモデルの根本的な弱点である推論と抽象化が得られます。
- これを可能にする新しい形式のトレーニングが登場し、モデルを微分可能な変換から簡単に遠ざけることができます。
- モデルは開発者の関与をあまり必要としません-ノブを絶えずねじることはあなたの仕事ではありません。
- 学習した機能とアーキテクチャの大規模で体系的な再利用が表示されます。 再利用可能なモジュール式ルーチンに基づいたメタ学習システム。
さらに、これらの考慮事項は特に機械学習の基礎である教師トレーニングには特に適用されないことに注意してください-非教師学習、教師あり学習、強化学習を含むあらゆる形態の機械学習にも適用されます。 基本的に、タグがどこから来たのか、トレーニングサイクルがどのように見えるのかは関係ありません。 機械学習のこれらの異なるブランチは、同じデザインの異なる側面にすぎません。
どうぞ
プログラムとしてのモデル
前述したように、機械学習の分野で期待される必要な変換開発は、純粋なパターン認識を実行し、 局所的な一般化のみが可能なモデルから、 究極の一般化を達成できる抽象化と推論が可能なモデルに移行することです。 基本レベルの推論を備えた現在のAIプログラムはすべて、人間のプログラマーによってハードコーディングされています。たとえば、検索アルゴリズム、グラフ操作、形式的ロジックに依存するプログラムなどです。 そのため、DeepMind AlphaGoプログラムでは、画面上の「インテリジェンス」のほとんどは、専門のプログラマーによって設計およびハードコーディングされています(たとえば、モンテカルロ法を使用してツリーを検索する)。 新しいデータのトレーニングは、特別なサブモジュール(バリューネットワークとポリシーネットワーク)でのみ行われます。 しかし、将来的には、そのようなAIシステムは人間の関与なしに完全にトレーニングされる可能性があります。
これを達成する方法は? よく知られているタイプのネットワーク、RNNを使用します。 重要なのは、RNNの制限が直接分散ニューラルネットワークよりもわずかに少ないことです。 これは、RNNが単純な幾何学的変換以上のものである
for
です。これらは、
for
ループで連続的に実行される幾何学的変換です。
for
ループは開発者が設定します。これは組み込みのネットワークの前提です。 当然、RNNはまだ表現できるものが限られています。これは、主に各ステップが微分可能な幾何学的変換であり、連続した幾何空間内のポイントをステップバイステップで情報を送信する方法のためです(状態ベクトル)。 ここで、ループと同じ方法でプログラミングプリミティブを使用して「構築」されるニューラルネットワークを想像してください。ただし、ジオメトリックメモリがスティッチさ
for
た単一のハードコーディング
for
ループだけでなく、モデルが自由に処理できるプログラミングプリミティブの大規模なセットを使用して、そのような分岐のような処理能力、
if
オペレータ、
while
このようなリスト、グラフ、ハッシュテーブルとして、作成変数、長期記憶のためのディスク・ストレージ、ソート演算子、高度なデータ構造 IC、およびより。 そのようなネットワークが表すことができるプログラムの範囲は、既存の深層学習ネットワークが表現できるよりもはるかに広くなり、これらのプログラムのいくつかは優れた一般化力を達成できます。
つまり、一方では「ハードコーディングされたアルゴリズムインテリジェンス」(手書きソフトウェア)、もう一方では「トレーニングされた幾何学的インテリジェンス」(深層学習)という事実から逃れます。 代わりに、 推論と抽象化を提供する正式なアルゴリズムモジュールと、 非公式の直観とパターン認識機能を提供する幾何学的モジュールの混合物を取得します 。 システム全体は、人間の関与をほとんどまたはまったく伴わずにトレーニングされます。
私の意見では、すぐに進歩できるAIの関連分野は、 ソフトウェア合成 、特にニューラルソフトウェア合成です。 プログラム合成は、検索アルゴリズム(遺伝的プログラミングの場合のように遺伝的検索など)を使用して単純なプログラムを自動生成し、可能性のあるプログラムの大きなスペースを調査することから成ります。 多くの場合、入力/出力ペアのセットとして提供される、必要な仕様を満たすプログラムが見つかると、検索は停止します。 ご覧のとおり、これは機械学習に非常に似ています。「学習データ」は入出力ペアとして提供されます。入力から出力データへの変換に対応し、新しい入力データの一般化が可能な「プログラム」を見つけます。 違いは、ハードコーディングされたプログラム(ニューラルネットワーク)のトレーニングパラメーターの値の代わりに、個別の検索プロセスを通じてソースコードを生成することです。
私は間違いなく、今後数年間でこの分野に多くの関心を寄せることを期待しています。 特に、一般的な言語でプログラムを生成するだけでなく、ニューラルネットワーク(幾何学的データを処理するフロー)を生成し、
for
ループなどのアルゴリズムプリミティブの豊富なセットで補完する、ディープラーニングとソフトウェア合成の関連分野の相互浸透を期待し
for
ます-その他多数。 これは、直接ソースコードを生成するよりもはるかに便利で便利であり、機械学習の助けを借りて解決できる問題の境界を大幅に拡大する必要があります。これは、トレーニング用の関連データを受信して自動的に生成できるプログラムのスペースです。 シンボリックAIと幾何学的AIの混合。 現代のRNNは、このようなハイブリッドアルゴリズムと幾何学的モデルの歴史的な祖先と考えることができます。

図: トレーニングされたプログラムは、幾何学的プリミティブ(パターン認識、直感)とアルゴリズムプリミティブ(引数、検索、メモリ)に同時に依存しています。
バックプロパゲーションと微分可能層を超えて
機械学習モデルがプログラムのようになれば、それらはもはや微分不可能になります-間違いなく、これらのプログラムは微分可能なままになるルーチンとして連続した幾何学的レイヤーを使用しますが、モデル全体はそのようにはなりません。 その結果、固定されたハードコーディングされたネットワークで重み値を調整するためのバックプロパゲーションの使用は、将来モデルをトレーニングするための好ましい方法ではない可能性があります-少なくとも、これは制限できません。 非微分可能システムを最適にトレーニングする方法を理解する必要があります。 現在のアプローチには、遺伝的アルゴリズム、「進化戦略」、特定の強化学習方法、およびADMM(ラグランジュ乗数の可変方向の方法)が含まれます。 当然、勾配降下は他のどこにも行きません。勾配に関する情報は、微分可能なパラメトリック関数を最適化するのに常に役立ちます。 しかし、私たちのモデルは、単に微分可能なパラメトリック関数よりもますます野心的になります。そのため、自動化された開発(「機械学習」の「学習」)は逆伝播以上のものを必要とします。
さらに、バックプロパゲーションにはエンドツーエンドのフレームワークがあります。これは、適切なインターロック変換を学習するのに適していますが、ネットワークの深度モジュール性を十分に活用していないため、計算的には非効率的です。 あらゆるものの効率を高めるために、1つの普遍的なレシピがあります。モジュール性と階層を導入することです。 そのため、階層的な順序で編成された特定の同期メカニズムを備えた解放された学習モジュールを導入することにより、逆伝播自体をより効率的にすることができます。 この戦略は、DeepMindの最近の「合成勾配」に関する研究に部分的に反映されています。 近い将来、この方向でさらに多くの作業が期待されます。
勾配を適用しない効率的な検索プロセスを使用して、グローバルに微分不可能なモデル(ただし、微分可能な部分を含む)を訓練し、成長させる一方で、いくつかのより効率的な勾配を使用して微分可能な部分をさらに速く訓練する未来を想像できますバック配布バージョン
自動機械学習
将来、アーキテクチャモデルはトレーニングによって作成され、エンジニアによって手動で作成されることはありません。 学習モデルは、より豊富なプリミティブおよびプログラムのような機械学習モデルと自動的に連携します。
ほとんどの場合、ディープラーニングシステムの開発者はPythonスクリプトを使用してデータを際限なく変更しています。そのため、ディープラーニングネットワークのアーキテクチャとハイパーパラメーターを構成して、動作するモデルを取得するか、開発者が非常に意欲的な場合でも優れたモデルを取得するのに時間がかかります。 言うまでもなく、これは物事の最高の状態ではありません。 しかし、ここでもAIが役立ちます。 残念ながら、データ処理と準備の部分は、フィールドの知識と、開発者が何を達成したいのかを高いレベルで明確に理解する必要があることが多いため、自動化が困難です。 ただし、ハイパーパラメーターの設定は簡単な検索手順であり、この場合、開発者が何を達成したいのかはすでにわかっています。これは、構成する必要があるニューラルネットワーク損失関数によって決まります。 現在では、ほとんどのモデル設定ツイストを引き継ぐ基本的なAutoMLシステムをインストールすることが一般的になっています。 私自身は、Kaggleコンペティションで優勝するためにインストールしました。
最も基本的なレベルでは、このようなシステムは、スタック上のレイヤーの数、その順序、および各レイヤーの要素またはフィルターの数を単純に調整します。 これは通常、第7章で説明したHyperoptなどのライブラリを使用して行われます(注: Pythonの書籍での深層学習 )。 しかし、さらに多くのことを行い、最小限の制限でトレーニングを行い、適切なアーキテクチャをゼロから取得することができます。 これは、たとえば強化学習や遺伝的アルゴリズムを通じて可能です。
AutoMLのもう1つの重要な開発分野は、モデルの重みと同時にモデルアーキテクチャのトレーニングを受けることです。 モデルをゼロからトレーニングするたびに、非常に非効率的なわずかに異なるアーキテクチャを試行するため、非常に強力なAutoMLシステムがアーキテクチャの開発を制御し、モデルのプロパティはトレーニングデータへの再配布を通じて構成され、計算の冗長性をすべて排除します。 これらの行を書くとき、同様のアプローチがすでに適用され始めています。
これがすべて始まると、機械学習システムの開発者は仕事なしに放置されることはありません-彼らはバリューチェーンのより高いレベルに移動します。 彼らは、ビジネス目標を真に反映する複雑な損失関数の作成により多くの努力を注ぎ始め、そのモデルが事業を行うデジタルエコシステムにどのように影響するかを深く理解します(たとえば、モデル予測を使用して生成するクライアント彼女のトレーニングのためのデータ)-最大の企業だけが今考えることができる問題。
モジュラールーチンの生涯学習と再利用
モデルがより複雑になり、より豊富なアルゴリズムプリミティブに基づいて構築される場合、この複雑さの増加により、新しいタスクまたは新しいデータセットがあるたびにモデルを最初からトレーニングするのではなく、タスク間でより集中的な再利用が必要になります。 最終的に、多くのデータセットには、新しい複雑なモデルをゼロから開発するのに十分な情報が含まれておらず、以前のデータセットの情報を使用するだけで必要になります。 新しい本を開くたびに再び英語を勉強することはありません。それは不可能でしょう。 さらに、新しいタスクごとに最初からモデルをトレーニングすることは、現在のタスクと以前に遭遇したタスクとが大幅に一致するため、非常に非効率的です。
さらに、近年、いくつかの疎結合タスクを行うように同じモデルを教えることにより、 これらの各タスクの結果が改善されるという注目すべき観測が繰り返し行われています。 たとえば、同じニューラルネットワークを英語からドイツ語に、フランス語からイタリア語に翻訳することを学習すると、これらの言語ペアのそれぞれで優れたモデルが作成されます。 単一の畳み込みベースを使用して、画像セグメンテーションモデルと同時に画像分類モデルをトレーニングすると、両方のタスクで優れたモデルが得られます。 などなど。 これは非常に直感的です:これら2つの一見異なるタスク間で部分的に一致する情報が常にあるため、一般的なモデルは、この特定のタスクでのみトレーニングされたモデルよりも個々のタスクに関するより多くの情報にアクセスできます。
さまざまなタスクにモデルを再適用するときに実際に行うことは、視覚属性の抽出などの一般的な機能を実行するモデルに事前トレーニング済みの重みを使用することです。 これは実際に第5章で見ました。将来、この手法のより一般的なバージョンがどこでも使用されることを期待しています。以前に取得した属性(サブモデルの重み)だけでなく、モデルアーキテクチャとトレーニング手順も適用し始めます。 モデルがプログラムにより類似するようになると、通常のプログラミング言語でサブプログラムを関数およびクラスとして再利用し始めます。
今日のソフトウェア開発プロセスの様子を考えてみてください。エンジニアが特定の問題(PythonのHTTPリクエストなど)を解決するとすぐに、再利用のために抽象ライブラリとしてパックします。 将来同様の問題に直面するエンジニアは、既存のライブラリを検索し、ダウンロードして自分のプロジェクトで使用するだけです。 同様に、将来、メタトレーニングシステムは、高レベルの再利用可能なブロックのグローバルライブラリをふるいにかけることで、新しいプログラムを構築できるようになります。 システムがいくつかの異なるタスクに対して同様のルーチンの開発を開始すると、ルーチンの「抽象」再利用可能バージョンがリリースされ、グローバルライブラリに保存されます。 このようなプロセスは、「究極の一般化」を達成するために必要なコンポーネントである抽象化の可能性を開きます。多くのタスクと領域に役立つサブルーチンは、意思決定の特定の側面を「抽象化」すると言えます。 この「抽象化」の定義は、ソフトウェア開発における抽象化の概念ではないようです。 これらのルーチンは、幾何学的(事前学習済みの表現を使用した深層学習モジュール)、またはアルゴリズム(現代のプログラマが使用するライブラリに近い)のいずれかです。
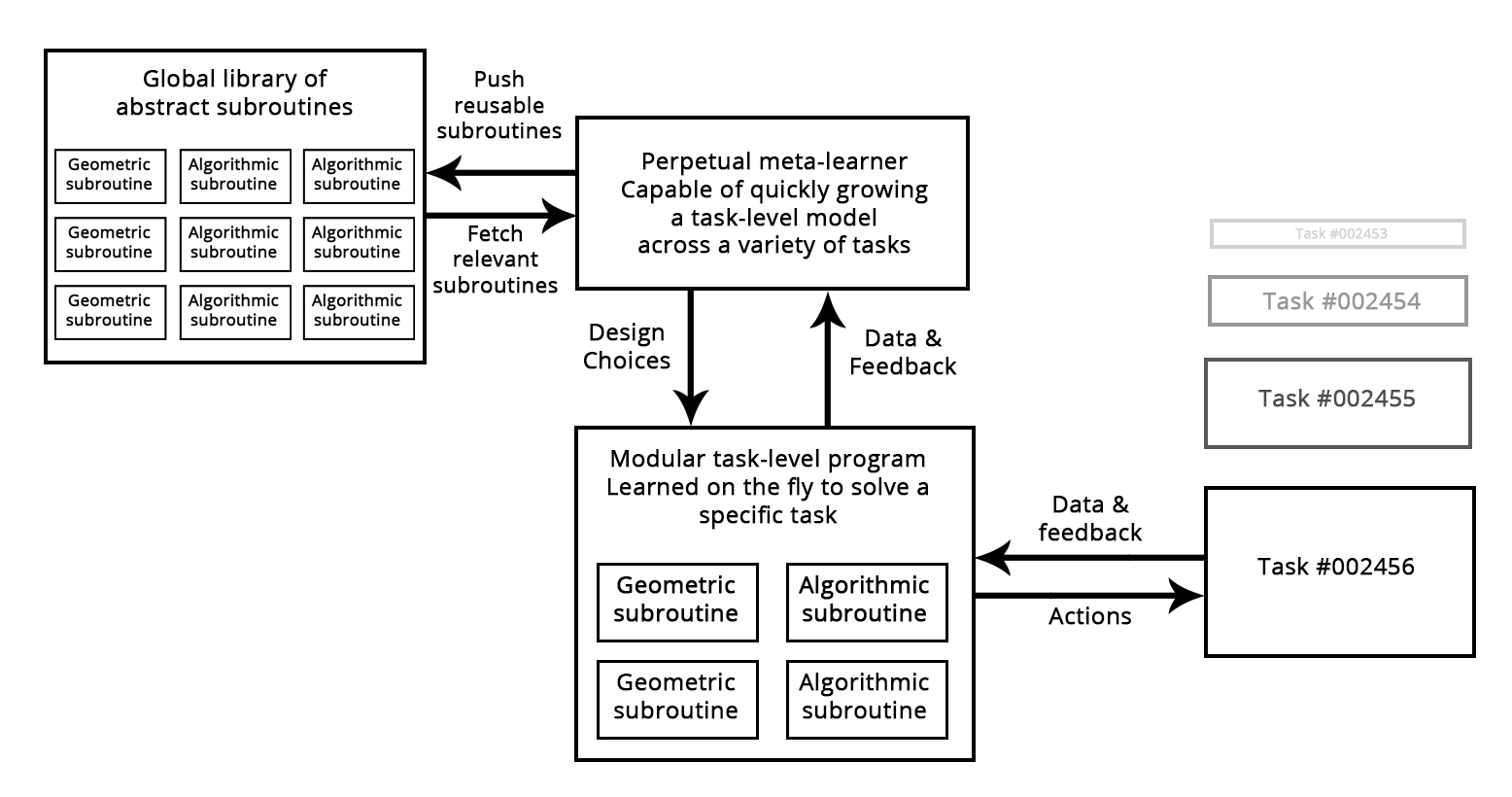
図: 再利用可能なプリミティブ(アルゴリズムおよび幾何)を使用してタスク固有のモデルを迅速に開発し、それによって「究極の一般化」を実現できるメタ学習システム。
結論:長期ビジョン
要するに、機械学習に関する私の長期的なビジョンは次のとおりです。
- モデルはプログラムのようになり、現在作業しているソースデータの連続的な幾何学的変換をはるかに超える機能を獲得します。 おそらく、これらのプログラムは、人々が環境や自分自身についてサポートしている抽象的なメンタルモデルにはるかに近く、アルゴリズムの性質により、より強力に一般化できるでしょう。
- 具体的には、モデルはアルゴリズムモジュールと形式的推論、検索、抽象化能力、および幾何学的モジュールと非公式の直観およびパターン認識を組み合わせます 。 AlphaGo(集中的な手動プログラミングとアーキテクチャ開発を必要とするシステム)は、象徴的なAIと幾何学的なAIの融合がどのように見えるかを示す初期の例です。
- 再利用可能なルーチンのグローバルライブラリのモジュラーパーツを使用して、(人間のプログラマーが手動で作成するのではなく)自動的に成長します。 メタ学習システムが共通の問題解決パターンを特定すると、それらは最新のプログラミングの関数やクラスによく似た再利用可能なルーチンに変換され、グローバルライブラリに追加されます。 これが抽象化の方法です。
- グローバルライブラリと対応するモデル成長システムは、何らかの人間のような「制限の一般化」を実現できます。新しいタスク、新しい状況に直面すると、システムは非常に少量のデータを使用してこのタスクの新しい作業モデルを組み立てることができます。1)豊富なプログラムのようなプリミティブ、 2)同様の問題を解決する豊富な経験。 同様に、他の多くのゲームで以前の経験があり、刺激を単にアクションに変換するのではなく、以前の経験に基づいたモデルが抽象的でプログラムのようなものであるため、人々は新しい複雑なビデオゲームをすばやく学習できます。
- 基本的に、この継続的に学習するモデル成長システムは、強力な人工知能として解釈できます。 しかし、ある種のロボ黙示録の始まりを期待しないでください。それは純粋な幻想であり、知性と技術を理解する上での深い誤解から生まれたものです。 ただし、この批判はここには属しません。