現在の教育の問題の1つは、学生のモチベーションが低いことです。 有名な(そしてそれだけではない)大学の卒業生のほとんどが専門分野に従っていないことを知っています。 著者によると、主な理由は、トレーニング中に学生が研究の主題に十分に興味を持っていなかったという事実にあります。 その結果、教育機関の壁を離れた後の彼の内的動機のレベルは、習得した知識が役立つ仕事を得るのに十分ではありません。
生徒に自分の発達レベルを高めるように促す力として、動機付けを考慮してください。 生徒が習得すべき特定の量と期間の一連の情報があるとします。 生徒が現在のある程度の知識レベルにあり、教師の仕事が生徒の知識レベルを「高さ」まで上げることだと想像してください 一定時間 (図1)。

図1:学生に対するさまざまな力の影響
従来は、傾斜面に沿った物体の持ち上げと問題を比較できます(表面の摩擦はゼロと見なします)。 この時点で、2つの力が生徒に働きかけます。
- モチベーションの力 生徒がより高いレベルの知識を達成するためのタスク。
- 劣化の力 、現在の発達レベルに戻りたいという学生の欲求を決定します。 劣化の力は一定であり、学生の知識のレベルに依存しないと仮定します
傾斜面には角度があります 、リフティングに必要な動機力が変化するかどうかに応じて。 必要なモチベーションの強さを表現する:
したがって、必要な動機力は、傾斜角の増加とともに増加します。 絶対に垂直な平面では、動機付けの力は劣化の力に等しくなります。
一方、学生は学習パスを通過する必要があります。学習パスは傾斜角の値に反比例します。
このパスは、マスタリングに必要なプログラム全体です。 プログラムは特定の時間(たとえば、学期)に完了する必要があるため、必要な資料の速度を表現します。
どこで -材料の基本速度、 。
速度の変化の限界とモチベーションの強さを考慮してください:
速度と力の積は力であることが知られています。 この場合、
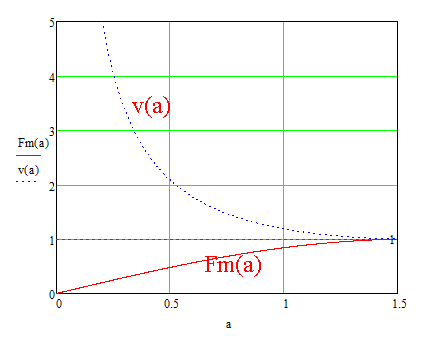
図2:材料の学習速度と動機付けの傾斜角依存性のグラフ
これは被験者を研究するために必要な力です:
(5)から、プログラムの一定の複雑さとそれを学習する一定の時間で、それを学習するのに必要な力はその基本部分を習得するどんな複雑さでも同じであると結論づけることができます。
学生の学習機会を考慮してください。 これを行うために、次の概念を紹介します。
-学習の慣性。 それは、学生が新しい情報に対してどれだけ不活性であるかを決定します。
-飽和係数。新しい情報を認識する学生の能力を示します。 学習期間全体を通して学生が情報を習得するために均一な努力をする単純化されたケースを考えてみましょう。 次に、1次の微分方程式を使用して、次のように記述できます。
この微分方程式の定性的解は、1次非周期的リンクの関数です[1]。

図3:下の学習遷移
どこで -学生によって適用された力を持つ定常状態の知識のレベル 、 -トレーニング時定数。 で知られている プロセスが到達します 定常状態の値から。 のために 現在の値が確立された値の95%に達したため、プロセスは確立されたと見なされます。 したがって、マスタープログラムのレベルが学生によるプログラムの開発の最大可能レベルよりも低い場合、いわゆる飽和レベル、つまり消費されたエネルギーに関係なく新しい情報が認識されなくなる場合、対象の完全な開発が可能です。 飽和レベルに近づくと、新しい知識の同化率は徐々に低下します。 プログラムを時間の経過とともに習得できるように、プログラムレベルを最大の63%に設定することをお勧めします 。 曲線のこのセクション(図3)は、ほぼ全期間にわたってほぼ線形であるため、プログラムを均等な部分で習得します。つまり、学生はトレーニング期間の開始時と終了時の両方でレッスンのすべての教材を学習します。 被験者の開発の一定の速度を提供します。
学生が加速したペースでプログラムを繰り返しまたは暗記するときの試験準備の場合を考えてください。 これを行うために、特徴を紹介します -再トレーニング率。 この係数は、知識をテストする前に、短時間で大量の情報を記憶する学生の能力を決定します。 次の形式の2次微分方程式を解くことにより、 なります:

図4:過渡的な学習ベースの再トレーニングプロセス
得られた特性は、セッション中の生徒の実際の行動と相関します。試験の集中準備中に教材を学習すると、生徒の能力に応じて、教育レベルが飽和レベルを超え、オーバーシュートのプロセスが発生します。その値は再トレーニングの係数によって決まります。 しばらくすると、一時的な減少が始まります-一部の資料は忘れられます。 その後、資料は徐々にuになり、知識のレベルは通常に戻ります。
自動制御システムの観点から、学生を訓練を受けた人と考えてください[2]。

図5:教師と学習者
訓練を受けた人の潜在意識は、適応規制のメカニズムと外部の邪魔な影響を使用して、教師、メディア、パーティー、ネットワーク、他の人などからの変化に適応します。 (図5)。 彼らの助けを借りて、情報社会のメンバーの大多数の心と潜在意識を変えることができます。 このモデルをソフトフィードバック付きの単一ループ制御システムの形式に拡大します(図6)。

図6:学習者のモチベーションを管理するための統合システム
初期状態では、制御システムの入力に制御信号が供給されます -一定レベルの自発性。 潜在意識の助けを借りて、伝達関数を持つレギュレーターとして機能する 信号は伝達関数でパワー要素(意識)に入ります 、上に示したように、2次非周期的リンクに近い。 パワー要素の出力では、アクションの動機の信号が直接表示されます。 フィードバックリンクを介して、信号 加算器に到着します。 レギュレーターのタスクは、エラーを最小限に抑えることです。 ドライバーとフィードバック信号の間。 システムは静的モードに入ります。 外部妨害に対する2つの可能なオプションを検討します(図7)。

図7:学習者の外部動機付けの可能なオプション
- 動機付け信号は、自己動機付け信号に追加されます。 以下に、このオプションが正しいことを示します。
- 2番目の場合、動機付け信号は制御システムの外部に供給され、最初の近似ではその状態に影響しません。 実際には、そのような影響は動機付け活動の結果のパラメーターの変化につながり、それがあなた自身の動機付けのレベルに影響を与える可能性があります。 簡単に言えば、競争は2つの人格の間で始まります。
最初のケースをより詳細に検討しましょう。 内部と同じ入力に外部モチベーションを適用することは技術的に不可能です。 別の観点からこのプロセスを考慮する必要があります(図8)。
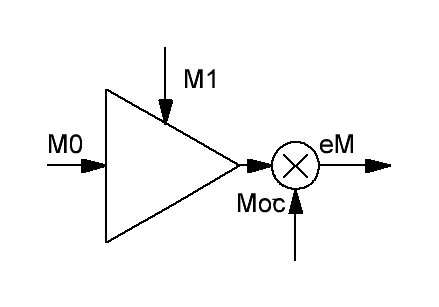
図8:自己動機付けに対する外部動機付けの影響
システムの入力に適用される外部の動機付けは、個人の動機付けのレギュレーターを制御します。 したがって、教師のタスクの1つは、自己意欲を高めるためのパラメーターと方法の選択です。 訓練を受けた人をプログラミングする最も効果的な方法の1つは、自己意欲に対する効果です。
例を考えてみましょう:
訓練を受けた人は仕事に就きます。 一方で、雇用主は可能な限り集中的に働く従業員に興味があり、仕事の結果を犠牲にして刺激する方法を見つけることを試みています(従業員の意見では、ボーナス賃金システムに関してはお金です)。 一方、従業員のお金は仕事の最終目標ではありません。 従業員の主な目標は、彼自身のアパートの外観であり、個人的な独立性、自給自足の感覚を得ることです。 次に、スキームで 従業員の動機付けの問題では、金銭は動機付けの影響スキームの追加ポイントであり、スキームは 。 残念ながら、原則として、従業員自身は明らかに自分の本当の目標を知らない場合があります。 この状況は、セキュリティシステムの違反です。これにより、影響力を通じて人の目標を変更できます。 これらの脆弱性は、ソーシャルエンジニアリングで広く使用されています。 正しいプログラミング方法は、多くの場合スタッフの心理学者の助けを借りて、修正することなく個人の真の目標を共同で検索することです。 訓練された人格が自身の目標を決定した後、制御システムは自己リプログラミングのプロセスを開始し、訓練された人格からの精神分析の原型は自給自足の人格に変換されます[3]。
学生のモチベーションといえば、スキームを続けます:
中間リンクが卒業証書、仕事、お金である場合。 より一般的な場合:
まず第一に、学生が追求する目標を見つけることが必要です:おそらく彼は科学者、エンジニア、または有名人になりたいです。 これは、テーマテスト(オリンピアード、カンガルーテスト、大学入学前のキャリアカウンセリングテスト)の助けを借りて、または心理学者と一緒に働く学生の助けを借りて行うことができます。 一方、特定の場合に役立つ可能性のあるいくつかの種類の知識があります。 生徒は、自分の目標と一連の知識との関係を伝える必要があります。
得られたデータに基づいて、個々のトレーニングプログラムを編成することは可能ですが、そのようなプログラムには欠点があります。 まず第一に-高度な複雑さ-各研修生に特定の動機付け効果を適用する必要があるためです[4]。 簡単な解決策の1つは、学生の大規模なグループを小さなグループに分割することです。この場合、何らかの形でグループメンバーの目標を1つのメタ目標の下で要約できます。 1つのグループでは、「分析学生」が訓練され、ヒューリスティック分析に強く、もう1つのグループでは、「学生作成者」などです。このような知識の多様化は、学生が一般プログラムを勉強しているが、同時にいくつかの狭い専門家でもあるという点で有用です関心のある分野。 将来的には、狭い分野の専門知識が学生の目標達成に役立ちます。
- Bessekersky V.A.、Popov E.P. 自動制御システムの理論/ V.A. Bessekersky、E.P. ポポフ。 エド。 4、回転 そして追加します。 -サンクトペテルブルク、職業、2007 .-- 752s。 -(シリーズ:スペシャリスト)
- ツィガノフV.V. 適応メカニズムと高度な人道的技術者。 人道システムの理論。 -M。:アカデミックプロジェクト。 Alma Mater、2012年-346ページ
- Brushlinsky A.V. 思考と問題のある学習の心理学。 M.、1983
- Verbitsky、AA 高等学校での能動学習:文脈的アプローチ/ A.A. Verbitsky-M .: Higher School、1991 .-- 205 p。
この記事の歴史
遠い2015年、大学院で勉強しているときに、教育学のテストを受けるための1つ(唯一)の要件は、クラスメートへの短いレポートの準備でした。 この記事は、私がやや頑固な報告書の質の高い研究であり、統合不可能なものを統合しようとして作成されました。 教師は、VAKリストのジャーナルの1つに「哲学と心理学の新しい言葉」を発表することさえ提案しました。 もちろん、私はこれをしませんでした。
4月1日からすべて!
4月1日からすべて!