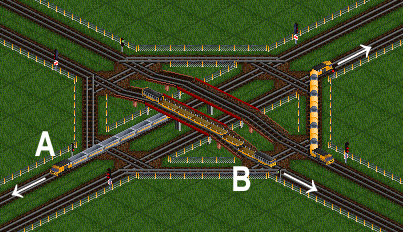
サンタクロースは子供たちにデュプロ鉄道をもたらしました。 レールセグメントは非常に簡単に相互接続されており、いくつかの小さな閉鎖経路を構築し、駅を設置して、列車が輪になって走っているのを見ることができます。 時々彼は停止し、子供はコラムからエンジンを「一杯にする」必要があります。その後、エンジンは再び作動します。
最も簡単な方法の例を次に示します。

この列車は3周目を過ぎてすぐに退屈してしまい、Thingiverseを掘り下げて10万回目に役立つ3Dプリンターの使用を試みました。 そして突然、Duploエンジン専用の矢印セグメントが見つかりました 。
矢印は次のように機能します。3つの入力と出力があります。最初、2番目、3番目に呼び出しましょう。 列車が最初または2番目のノードに入ると、矢印は常に3番目を通過します。 この場合、矢印は対応するノードに切り替わります(つまり、最初のノードから入った場合、最初のノード、2番目のノードから入った場合、2番目のノードに切り替わります)。 しかし、彼が3番目のノードに入ると、出口は矢印の状態に依存し、最初のノードと2番目のノードの両方を出ることができます。 すなわち:
'1'-> '3'(矢印は '1'に変換されます)
'2'-> '3'(矢印は '2'に変換されます)
「3」->矢印が「1」にある場合は「1」、それ以外の場合は「2」
そのような矢印をいくつか印刷し、「普通の」鉄道を集め始めました。 なんとなく悲しいことにすべてが判明しました-蒸気エンジンは途中までしか移動せず、いくつかのリングに張り付いていて、離れたくありませんでした。
問題1(単純):すべてのノードが相互接続されるように、ネットワークにはいくつの矢印セグメントが必要ですか? 道路は、行き止まりのない連続したものでなければなりません。
答え
射手は必要な偶数でなければなりません。 これは、相互に接続された3つの矢印の2つのノードを精神的に想像すると理解しやすくなります。 つまり、矢印は常に1つの空きノードにプラスされます。
しかし、一生懸命働いて、最も簡単なオプションとして、数日で問題を解決しました。 訪問するために来た友人は、緊張せずに5分でそれを決定しました:)
各矢印を文字で示します。ノードは上記の例と同じです。 つまり 私たちのネットワークにはノード['a1'、 'a2'、 'a3'、 'b1'、 'b2'、 'b3']があります。
解決策
2つの矢印の場合:
[( '' a1 '、' a2 ')、(' a3 '、' b3 ')、(' b1 '、' b2 ')]
したがって、この方法でのみ、列車は道路のすべてのセグメントを異なる方向に通過します。実際、2つの矢印には2つのソリューションしかありません。これは間違っています。 ブラッドは書いたが、誰も気づかなかった。 ラララ...
[( '' a1 '、' a2 ')、(' a3 '、' b3 ')、(' b1 '、' b2 ')]
したがって、この方法でのみ、列車は道路のすべてのセグメントを異なる方向に通過します。
しかし、さらに矢印をとるとどうなりますか? うーん、単純な解決策について考えすぎたら、もうそれをマスターすることはないでしょう。 しかし、コンピューターはマスターします! しかし、どうすればこのタスクに到達できますか? 私は数日間苦労しましたが、これに何らかの検索を追加しようとして、すべてがほぼすべてのものを捨てようとしましたが、突然アイデアが紙に解決策を書くようになりました。
トラック全体をステップに分割しました。
現在の状態→矢印の遷移→接続セグメントに沿った遷移→矢印の新しい状態を記憶する
つまり 上記のソリューションの場合、遷移は次のようになります(デフォルトの矢印状態:a3-> a1; b3-> b1):
a1-> a3-> b3(a3-> a1; b3-> b1)
b3-> b1-> b2(a3-> a1; b3-> b1)
b2-> b3-> a3(a3-> a1; b3-> b2)##矢印b3が切り替わっていることに注意してください
残りは簡単です:
- 指定された数の矢印に対して可能な道路構成をすべて生成します
- 各道路で:
- 電車を10回運転し、各ノードの移動回数をカウントします
- 通路が0または1のノードがある場合、これはモードに入るとシステムが無限ループに陥ったことを意味します
- そのようなノードがない場合、列車は道路全体に安全に急行します。これが必要なことです!
とてもシンプルなので、2日間テーブルに頭を突っ込んで、最終的にスタックオーバーフローに関するアドバイスを求めました。そこで、数分で銀の大皿にいくつかの解決策が与えられました。
トラックジェネレーター(タスクを宣言してネタバレに入れることはしません-私のような人にとっては、これは非常に残酷な冗談かもしれませんが、興味のために自分で解決しようとします):
def getTrack(l): # recursion anchor, basic case: # when we have 2 nodes only one pair is possible if len(l) == 2: yield [tuple(l)] else: # Pair the first node with all the others for i in range(1, len(l)): # Current pair pair1 = [(l[0], l[i])] # Combine it with all pairs among the remaining nodes remaining = l[1:i] + l[i+1:] for otherPairs in getTrack2(remaining, 1): yield pair1 + otherPairs
トラックラティス:
def solveTrack(track): # nodeCount = {} for n in nodes: nodeCount[n] = 0 railTr = None jointTr = 'a1' while True: pos = jointTr # nodeCount[pos] += 1 # railTr = getTransition(track, pos) # ( ) nodeCount[railTr] += 1 # jointTr = tj[railTr] # ( , ) if railTr[1] in ['1','2']: ## tj[railTr[0]+'3'] = railTr if max(nodeCount.values()) > nodesTrace and min(nodeCount.values()) < 3: # nodesTrace , . - - . #print "Infinite cycle detected" break #sol = "{}\t{}\t{}\t{}\t{}".format(pos, railTr, jointTr, tj['a3'], tj['b3']) #print sol if max(nodeCount.values()) > nodesTrace * 1.5: print "-------------------------------------------------------\n" print "Simulation complete!" print '\nNodes: ', nodeCount, "\n" print "Solution: ", track break return
入力データのノードのリスト、矢印のノード間の遷移を設定し、ソリューションの検索を開始するだけです! やった!
tj = {} # nodes = [] # ##create joints transition table for jt in range(nJoints): tj[idxs[jt]+'1'] = idxs[jt]+'3' tj[idxs[jt]+'2'] = idxs[jt]+'3' tj[idxs[jt]+'3'] = idxs[jt]+'1' nodes.extend((idxs[jt]+'1', idxs[jt]+'2', idxs[jt]+'3'))
うーん、しかし、4本矢印の道に解決策はありません。 そして、6(私は数時間待っていました)-どちらでもありません。 以上です。 夢の終わり。
でも。 しかし、矢印の一部のみを切り替え可能にし、残りを凍結するとどうなりますか? たとえば、次のように:
if railTr[0] in idxs[:nSwitchableJoints]: ## nSwitchableJoints - if railTr[1] in ['1','2']: ## tj[railTr[0]+'3'] = railTr
そして出来上がり-多くの解決策があります! 私はもっときれいなものを選択しようとしました:)
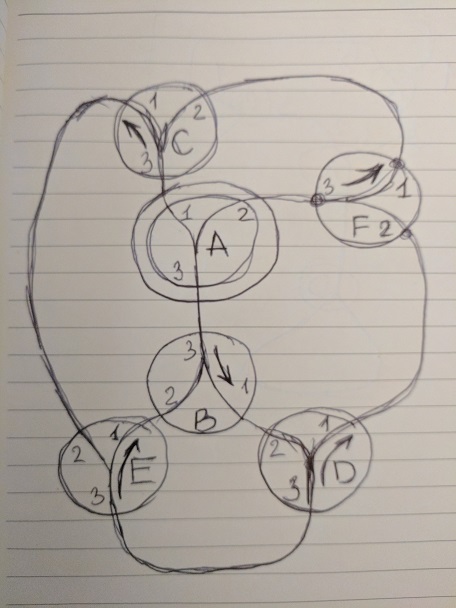
ここでは、矢印「a」のみが切り替え可能で、残りの3つは常に1つに切り替えられます。
このトラックはソリューションに対応しています。
[('a1', 'c3'), ('a2', 'f3'), ('a3', 'b3'), ('b1', 'd2'), ('b2', 'e1'), ('c1', 'e2'), ('c2', 'f1'), ('d1', 'f2'), ('d3', 'e3')] nSwitchableJoints = 1
今のところすべてです!