
「Device Lab by Google」コンテストの一環としてのDmitry Senashenkoによる記事 。
皆さんの多くはすでにこのプロジェクトについて聞いていて、それが何であるかをよく知っていると思います。 要するに、これはモバイルアプリケーション向けのコンピュータービジョンおよびローカリゼーションプラットフォームです。 Google Tangoプロジェクトデバイスは、2台のカメラ(広角および従来型)、深度センサー(本質的にミニチュアではKinect)、加速度計、ジャイロスコープ、気圧計のデータを使用して、周囲の3次元空間を認識し、その中の位置を追跡できます。 ATAPのエンジニアグループ(高度な技術とプロジェクト)の大きなメリットは、このすべての機器をモバイルデバイスに組み込むことができたというだけでなく、開発者にとって使い勝手の良い高レベルのSDKを開発して管理したことにもありますセンサーからのデータを処理し、必要な変換を実行することにより、開発者が便利な抽象化で作業できるようにします。 また、Googleの最高の伝統では、高品質のドキュメントを利用できるため、開発者はAndroid用アプリケーションの開発経験がなくても、デバイスにすばやく慣れることができます。
デバイスについて
動作原理

このデバイスには、基本的に2つの主要なローカライズモードがあります。エリアラーニングを使用する場合と使用しない場合です。 最初のモードでは、部屋を事前にスキャンしてマップを構築します(残念ながら、これはオフラインで行われます。つまり、最初に蓄積されたデータを処理し、その結果をADFファイル-エリア記述ファイルとして使用します)。その後、学習した部屋に非常に正確にローカライズできます。 、ドリフトを補正し、一時的な追跡の損失の問題に対処します。 (例えば、手や近すぎる物体でセンサーを閉じるとき)
2番目のモードでは、事前に準備することなく、空間に位置を特定し、デバイスの動きを追跡できます。 IMU(慣性計測ユニット)、広角カメラの特定の画像ポイントでの視覚走行距離計、深度センサーなど、すべてのセンサーからのデータを組み合わせて動作します。 しかし、以来 キャッチできるポイントはわかりません。このモードでは、デバイスの座標は常に蓄積されるエラーのためにドリフトします。 (図を参照)さらに、トラッキングが失われるリスクがあり、このモードでは一般に回復できません。
ローカリゼーションデータ(つまり、部屋に対するデバイスの座標と方向を本質的にある程度知っている)と深度センサーからの3次元ポイントクラウドを使用して、モバイルデバイスではこれまで不可能だった拡張現実アプリケーションを作成できます。 論理的な継続は、拡張現実眼鏡にTangoをインストールすることです(ホロレンズのようなGoogle Glassの次の反復?)が、今のところGoogle Cardboardの形でersatzの代替を使用できます。
精度について少し
もちろん、デバイスに対する最初の質問の1つはその精度です。 もちろん、ドキュメントはこの問題を扱っていますが、最適な条件での数センチメートルの精度に関する声明を確認したいという欲求を否定することはできませんでした。
なぜなら 時間は非常に限られていたので、既知の寸法の表を道具として使用して、上からその場しのぎの評価を行うことにしました。 (2 x 3メートル)テーブルから2メートルまでの偏差を伴う曲線パスに沿ってデバイスをテーブルの1つのコーナーから別のコーナーに移動し、各ポイントでグローバル座標(エリア学習の有無にかかわらず)を記録した後、これらのポイント間の距離を計算して比較しました何が起こったのか。 結果は次のとおりです。
- 平均偏差は2〜3 cmで、最悪の場合は最大5〜6 cm
- 15〜20メートルの軌跡でのエリア学習ありとエリア学習なしの精度は基本的には異なりません。これは、視覚走行距離計とIMUによるかなり高い品質のローカリゼーションを示しています
- デバイスの向きは、最大5 cmの誤差で座標に影響します(エリア学習の使用を含む)。 デバイスを元のポイントに戻したが回転した場合、その座標はわずかに異なります
明らかな理由により、精度は測定が行われる部屋に大きく依存します。 照明が良好で(直射日光を処理しないデバイス)、多数の特別なポイントがある部屋では、数センチメートルの精度を達成することができます。 しかし、劣悪な状況では、デバイスはすぐにトラッキングを失い、IMUは当面の間確実に役立ちますが、その機能は非常に限られています。 そのため、ロボットを備えた部屋は「通常の」部屋の悪い例であるため、タンゴを産業用ロボットアームに取り付けて、この方法で精度を測定するという考えを放棄しました。
次に、深度センサーの精度について説明します。 平面オブジェクト(床、壁、テーブル)の点群を削除し、点が平面にどの程度適合するかを分析することで、その精度を確認することにしました。 0.5〜4 mの最適な距離では、精度は通常約0.5 cmでしたが、一部の表面では、精度が2〜3倍低下しました。 テクスチャは、構造化されたIR放射に基づいた深度決定アルゴリズムでトリックを演じたように見えます。
SDKとAPIについて
要するに、Googleがトップです。 Tangoデバイスが発売されるとすぐに、デバイスの独自の機能だけでなく、そのためのアプリケーションのプログラミングが簡単になるため、開発者に終わりはなくなると思います。 導入部のフレーズは、Androidのプログラミングの経験のない開発者であってもデバイスに慣れることができるという実験的に確認された事実です。 デモロボット制御のTangoのメイン開発者であるMarco Simik(私たちの研究室の外国人マスター)は、Android開発の経験がほとんどありませんでしたが、それでも数日間、簡単なアプリケーションを書くのに十分な量のツールとAPIを学ぶことができました。
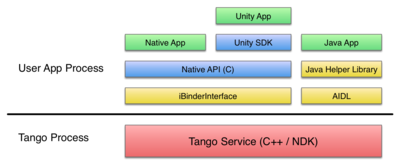
しかし、十分な賞賛。 タンゴサービスは独立したプロセスサービスです。 ソフトウェアスタックの一般的な構造を図に示します。
SDKは、C ++、Java、およびUnityで動作する機能を提供します。 順序は、おおよそ「高レベル」に対応しています。 もちろん、ゲーム開発者はUnityを使用できることを高く評価する可能性が高く、主にこのオプションを選択します。 AIDL(Android Interface Definition Language)または他のJavaアプリケーションを直接使用する場合は、 Java APIが最適です。 Android NDKを使用してアプリケーションを開発し、より完全に制御したい開発者は、 C APIを選択します 。
3つのバリアントすべてにおいて、APIはほぼ同一であり、デバイスからデータを取得し、管理し、さまざまな座標系から必要な変換を実行するためのツールを提供します。 (うち6個がすでにあります )
ドキュメントを改めて説明することはほとんど意味がないと思います。ドキュメントに慣れる方が良いでしょう。
軟膏で飛ぶ
しかし、開発キットでの状況は完璧とはほど遠いものでした。 時々、Tangoサービスがクラッシュし、動作を拒否するか、出力でノイズが発生しました。 このような場合、再起動のみが役立ちました。 一般に、デバイスの湿気がいくらか感じられました。これが女の子用キットの特性であり、市販のデバイスではこれらの子供の痛みが修正されることを期待しましょう。
さらに、特に3D gafikを使用するアプリケーションでは、デバイスが非常に顕著に加熱されることに注意してください。 ここでは、残念ながら、状況を根本的に変える可能性は低いです。 とにかく重い計算を行う必要があります。 そのため、Tangoデバイスを長期間使用し、積極的に使用する必要はありません。 評価のために、携帯電話やタブレットを使って3Dゲームを実行できます。デバイスのおおよその寿命はプラスまたはマイナスに一致すると思います。
さらに、マップの構築に奇跡が起こることを期待しないでください。 およその品質は、たとえばこのビデオで見ることができます。
さらに、このデバイスは魔法の杖ではなく、消費者の方法で使用する際に抑止力として機能する可能性が高い独自の制限があるため、平均的なユーザーは使用されるローカリゼーションアルゴリズムの機能を疑わないため、非常に不快な遅れ、ジャンプ、その他の不完全な作業の現れ。 たとえば、デバイスに付属しているゲームは、通常のユーザーの準備が整っていると言っても過言ではありません。ほとんどの場合、現在のゲームは単に「バギーで理解できない」と表現されます。 しかし、それは単にデバイスの湿気の単なる症状です。
デモ:ロボットを制御します
Google Tangoを毎週知り合った結果のビデオ:
UnityスクリプトのソースコードはGithubで公開されています。
アイデア
仮想現実が増加する傾向であることは秘密ではありません。 しかし、通常は、バーチャルをリアルに追加することを考慮していますが、いわば、リアルをバーチャルに追加することを望んでいました。 私たちの意見では、真のバーチャルリアリティを実現するには、バーチャルオーバーレイを追加するだけでは不十分で、バーチャルからリアルへのフィードバックが必要です。 ほぼ同じ方法で、物理オブジェクト用の仮想インターフェイスの追加に関するMITの研究が続きました。
私たちの場合、非常にリアルな移動ロボット用の仮想インターフェースを作成することにしました。 なぜなら 時間は非常に限られていたため、ロボットが実空間を移動するポイントを設定して、ロボットの制御のみに制限することにしました。 もちろん、このアイデアはさまざまな方向に継続できます:ロボットのインターフェイスを追加し(たとえば、ロボットの上にいる人の「ホログラム」、ロボット間のデータ交換を視覚化します)、フィードバックを作成します(たとえば、ロボットの計画されたパスを表示します)、現実と仮想を組み合わせたゲームを作成します(たとえば、実際のマシンで仮想オブジェクトを収集します)など。
しかし、目標点を設定することによるロボット制御の単純な実行でさえ、特にロボットがますます増えている業界では、非常に便利な機能となります 。
Google Tangoを使用して物理オブジェクトを制御するためのアイデアを開発する可能性は言うまでもありません。
実行
このアイデアを実装するために、Unity APIを使用することを決定しました。UnityAPIは、その高レベルを考慮して、デモアプリケーションを構築する最も簡単で簡単な方法です。 座標決定の信頼性を高めるために、エリア学習を使用したローカリゼーションを使用しました。 (実際には、ロボットはよく知られた部屋で使用される可能性が高いため、測定は難しくありません)。 もちろん、これなしでも実行できますが、これにより精度と信頼性が大幅に低下します。
もちろん、アプリケーションが動作し、ロボットが宇宙に独自のナビゲーションツールを持っていることが望ましいでしょう。そうでなければ、ロボットをデバイスの視野に常に入れておく必要があり、あまり便利ではありません。 私たちの移動ロボットは、2次元レーザースキャナーHokuyo-04LXとSLAM(同時ローカリゼーションとマッピング)を実装するソフトウェアを使用し、その出力で、周囲の占有グリッドを受け取りました。これを使用して、すでにロボットの軌道を計画できます。 (ロボットのソフトウェアはほとんどが自作でしたが、ROSで既製のモジュールを使用して同じことができます)。
これで、デバイスとロボットのグローバル座標を比較するだけで、最初の座標は加速度計を使用してすでに水平に調整されているため、デバイスのグローバル2次元空間でロボットとその向きを本質的にローカライズする必要があります。その後、システムからターゲットポイントの座標の変換を実行できますタブレットをロボットシステムに挿入します。
このアイデアを実装するために、アプリケーションには、モーショントラッキング、エリアラーニング、深度マップの取得という3つの機能を含める必要がありました。 (つまり、3次元の点群)アプリケーションを使用するには、次のパスに従います。
- 書き込み領域記述ファイル(ADF)、つまり プログラムが使用される施設のエリア学習を実施する
- 結果のADFをダウンロードし、デバイスを少し動かして、デバイスが特異点を認識し、独自のローカライズを行うようにします
- ロボットの位置をマークする
- ターゲットポイントをマークして、コマンド実行ボタンを押します
さらに、ロボットの位置に注意して、その座標のみを学習し、方向は学習しないことに注意する価値があります。ここでは、厳密に後ろに立って常にロボットを選択するというルールを作成することにより、トリックに取り組み、タスクを簡素化しました。 もちろん、一般的な場合、ロボットは特別なタグ(たとえば、画面に表示したり、身体に貼り付けたり)によって、またはTensorFlowに基づいたニューラルネットワークを使用して検出できます。 しかし、キノコは制限時間の影響を受けました。
コード
リポジトリ内のソース(上記のリンク)には、ADFファイルの選択、ADFの選択後のスプラッシュスクリーンの初期化(再ローカリゼーション)、メインコントロールスクリプト、UIの3つのスクリプトのみが含まれています。 これらのスクリプトを使用するには、AreaLearningサンプルに追加するだけです。
Unityスクリプトは特定の方法で実行され、デモで使用する3つの主要なコールバックがあります。
- 開始()は、アプリケーションの開始時に開始します
- 更新()は、フレームが更新されるたびに起動されます。
- OnGUI()はフレームごとに数回実行されます
その結果、次の構造になります。
- 開始()は、関連するイベントにコールバックを割り当てます
- 更新()プロセスは画面へのタッチを行い、必要に応じてコルーチンを起動して画面のテープ座標に対応するグローバル座標を見つけ、さらに成功したポイント選択に赤いマーカーを描画します
- OnTangoDepthAvailable、OnTangoPoseAvailableコールバックは、Tangoからのイベントを待機し、起動時に適切なフラグを設定します
- _WaitForTouchコルーチンは、ボタンの1つを押した後、画面上のタパスを待機します。その後、コルーチンを呼び出して、タパの位置に対応するグローバル座標を計算します
- _WaitForDepthは深度マップ(ポイントの3次元クラウド)を想定し、画面上の特定の座標についてグローバル参照システム内のポイントの座標を検索します
- _WaitForRequestは、ロボットへのコマンドの送信を処理します。この例では、単純なGETリクエストでした
ロボットの制御コードは、この記事の範囲を超えているため、現時点では公開されていません。
おわりに
私たちの知り合いの結果に基づいて、私は自信を持って言うことができます。GoogleTangoは、今後数年間でモバイルデバイスと考えるものに革命をもたらすことができる非常に有望なデバイスです。 一般に、このプロジェクトがGlassとWaveとして終了することはほとんどありません。 もちろん、現時点では、デバイスには子供の病気がないわけではなく、他のテクノロジーと同様に制限と機能がありますが、最初のデバイスは修正され、2番目のユーザーと開発者は徐々に慣れてきます。
したがって、私たちは、長年の仮想現実のブームがまもなく完全に機能するように見えると信じており、Google Tangoは、プログラミングの容易さ、開発者への親しみやすさ、既存のAndroidエコシステム、およびGoogleの積極的なプロモーションを通じて、明らかにそれをリードするつもりです。