
長い間、FLProgプロジェクトに関するHabrに関するニュースはありませんでした。 残念ながら、私の主な仕事と家事での仕事は、私に投稿を書く時間を残しませんでした。 しかし、プロジェクトは死にませんでしたが、発展を続けています。 最後の投稿から何が起こったのですか?
プログラムの3つの新しいバージョンがリリースされました。 バージョン1.8では、ユーザーブロックを作成できるようになりました。 ブロックは2つの言語のいずれかで作成し、FLProgプロジェクトで使用できます。 特定のコントローラーに関連付けられていません。 ユーザーブロックをライブラリに結合し、個別のブロックまたはブロックのライブラリ全体として、ファイルとしてディスクに保存できます。 ブロックを交換し、ライブラリに外部ブロックをロードすることが可能です。 ビデオチュートリアルでユーザーブロックの操作に関する詳細を確認できます。
FLProgでのカスタムブロックの使用
ビデオレッスン「カスタムブロックの操作とFBDでのブロックの作成」:
ビデオレッスン「カスタムブロックの操作とLADでのブロックの作成」:
ビデオレッスン「カスタムブロックの操作とLADでのブロックの作成」:
バージョン1.8以降。 プログラムのコアが大幅に変更されたため、操作の開始後初めて、かなり多くの重大なエラーが検出されました。 そのため、バージョン1.8.1のリリースと修正が必要でした。
昨日、バージョン1.9がリリースされました。その主な目的は、Bluetoothで作業を整理することでした。 この問題を解決するには、プログラムの機能を大幅に拡張する必要がありました。 文字列を操作するための6つの新しいブロックが追加され、以前はプロジェクトになかった2つの新しいデータ型(CharとByte)が追加されました。 また、アレイで動作し、SoftwareSerialが実装されています。 プログラムの新しいブロックとそれらの操作については、ビデオチュートリアルで見ることができます。
FLProgの新機能-1.9。 配列、文字列、com-port、bluetoothを使用します。
さらに、インターネット上で最も興味深いRemoteXYプロジェクトを見つけました。

プロジェクトの主なアイデアは、視覚的なオンラインエディターでArduinoボード用の独自の制御インターフェイスを作成できるようにすることです。 インターフェイスの説明はコントローラーファームウェアにあります。これにより、1つのAndroidプログラムがエディターで作成された任意のインターフェイスで動作できるようになります。

私はプロジェクトの作者に連絡を取り、協力することに同意しました。 FLProgプログラムのサポートがプロジェクトのWebサイトに追加され、RemoteXYプログラムを操作するための特別なユニットを作成しました。 このコラボレーションの結果はビデオで見ることができます。
FLProgプロジェクトでRemoteXYを使用する
まあ、プロジェクト内のユーザーによって最も期待される更新。 プロジェクトのバージョン1.9から、いつでもコントローラーを変更し、1つの言語で書かれた異なるプロジェクト間でコピーできます。 一見複雑ではないように見えるこの機能の実装は、非常に複雑であることが判明したため、新しいバージョンのリリースが遅れました。
そして最後に、いつものように、FLprog Webサイトでの新しいユーザープロジェクトの概要。 出版物の著者のテキストを保存しました。
投稿者:アマチュア
ソーラー充電コントローラー
こんにちは、同僚!
このプロジェクトを作成する目的は、尊敬されるセルゲイ・グルシェンコのプログラムが積極的に使用されており、非常に深刻なプロジェクトを収集できるという事実の例です。 ほぼ最初の段階で、FLProgに簡単なタイマーを作成し、ここに公開しました。この時点では、プログラムに現在あるものの半分もありませんでした。 次に、私はもっと何かを作成し、それに応じて有用で適用可能にしたかった)。 しかし、かなり長い間、私は何か面白いものに対する十分な想像力を持っていませんでした。
しかし、インスピレーションが私の上に来た日が来ました! 犯人は私の仕事の同僚であり、親友でした。 彼は太陽電池と電池のペアを取得しましたが、自分でこれを行うことが可能であると考えたため、工場の充電コントローラーを拒否しました。 そこで、独自のコントローラーを共同で組み立てることにしました。
スマートバッテリ充電の原理に関するインターネット上の多くの記事を読んだ後、プログラムのアルゴリズムを大まかに提示しました。 腺にこれを適用するだけです。
私はプログラミングを始めましたが、友人がこれをすべて自分でひねってはんだ付けしました。 プログラムは約1日で作成されましたが、多数のテスト、新しいバンの追加後、エラーは修正されました。 現時点では、すべてが完全に充電されており、すべての保護が機能しています。
プログラムアルゴリズムについて何が言えますか? 充電は「スムーズ」、つまりPWMです。 ブーストモード(集中充電)もあります。 バッテリーの放電と過充電からの温度による保護。 ディスプレイおよびもちろんCOMポートでの指示の結論。 ディスプレイをオンにし、手動および自動モードで負荷出力をオン/オフします。
おそらく誰もがプログラムを書くスタイルが異なると推測するので、あまりキックしないでください))コメントや良いアドバイスがあれば、喜んで耳を傾けて、将来的にメモします。
ご清聴ありがとうございました。
実際にはプログラムyadi.sk/d/oPgcPit8eSHyX
投稿者:seval
アクアストロージ
私はAquastorozhを作る必要がありました、それは家の1階全体のように浸水しました。 FLProgの著者のおかげで、私はアクアウォッチマン向けのプログラムを簡単に作成しました。 それは一年以上働いています。 すでに働いていた。
このプロジェクトを実装するために、12 Vモーターとリミットスイッチを内蔵した2線式制御を備えたボールバルブを購入しました。 Arduino Pro miniも購入しました。 残りは在庫がありました。
描画図。
アルゴリズム:リークが検出されると、アラームビットがトリガーされます。 4秒(実験的に表示)の電圧がバルブに印加されます。
そして、アラームダイオードが点滅します。 リークを修正して[リセット]を押すと、アラームビットがリセットされ、[開く]ボタンでバルブを開くことができます。
週に1回程度、[閉じる]ボタンでバルブを閉じて、防止のために開きます。
スキームとプログラムを投稿します。
私がマスターしなかった唯一のことは、アラームビットがトリガーされると、電圧が絶えずバルブに印加されることです。 事故をまだリセットしないでください。 しかし、これは私にとって重要ではありません。
画像形式のスキームを追加しました。

図とプログラムの入力と出力が異なる場合があることを明確にします。 私は長い間図を描きましたが、プログラムは常に変化しています。
投稿者:バルザマレックス
暗い廊下
私のアパートに大きな廊下があるということが起こりました。 そして、廊下の終わりにはバスルームがあります。 そして夜は暗いです。 しかし、時々私はしたい...私は記憶からどこに行くべきか覚えていないということではなく、それをより美しくすることにしました。
したがって、暗い廊下のハイライト:
Arduino ATmega328を使用しました。 制御のキーとして、L298Nモジュールが使用されます。

バックライト自体は、アルミプロファイルに接着されたSMD 5630 LEDストリップで作られています。 それぞれ約1.8メートルの3本のLEDラインができました。
簡単に言えば、作業のアルゴリズム:
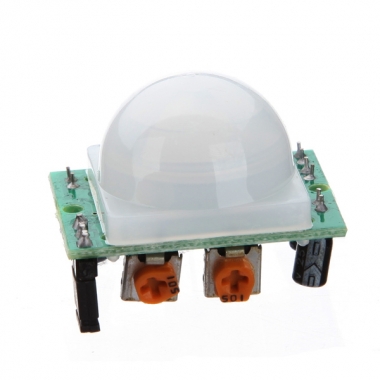
2つのデジタルセンサーがあります:Ts1およびTs2
3つのアナログ出力があります:B1、B2、B3
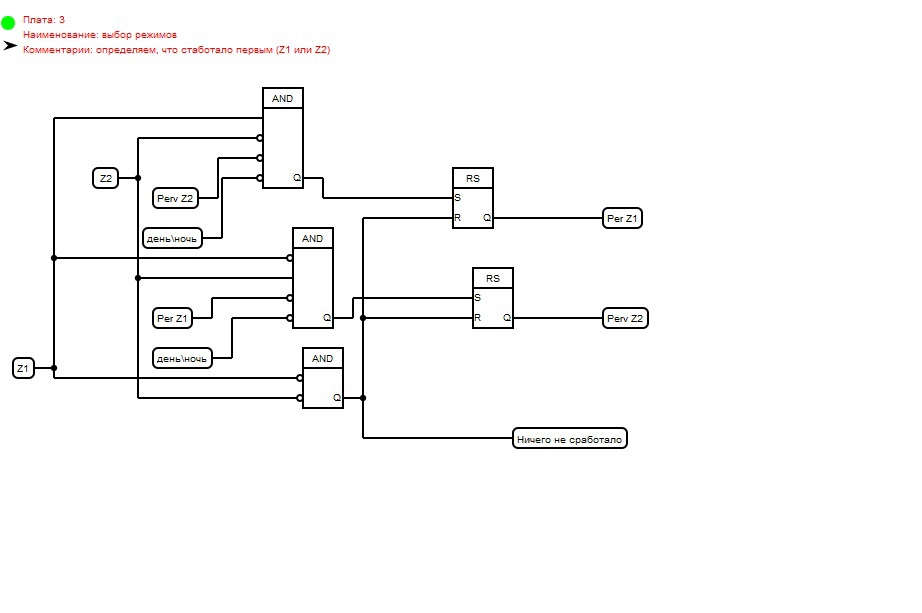
必要なのは、FIRST、c1がトリガーされ、b1にオンになり、c1とc2の両方が機能する場合です。b1とb2にオンになり、2秒後にb2とb3にオンになります。
最初のc2がトリガーされると、b3がオンになり、c2とc1がb3とb2をオンにすると、2秒後にb2とb1が機能します。
両方のセンサーが動作を停止すると、すべての出力がオフになります。
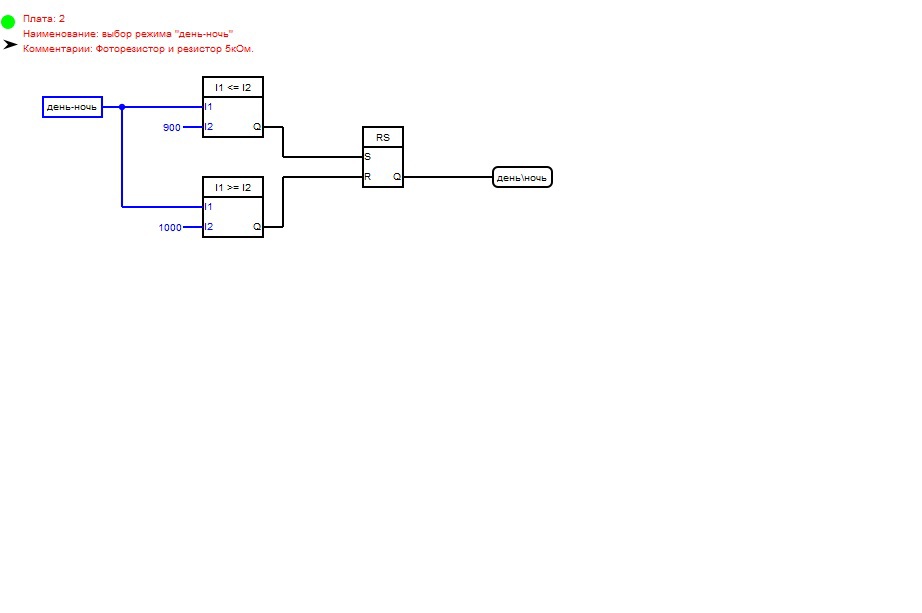
ダイオードランプの消灯は、スムーズに整理されています。 (原則として、組み込みもスムーズですが、必要ありませんでした。また、組み込みの遅延は最小限です)
センサーとしてHC-SR501センサー(2個)を使用しました。
バックライトは、内蔵キャビネット、その他の部品、センサーなどに沿って、下部に取り付けられます。 2階(高さ約3メートル)。
スリッパー同志は、私にサーキットのアイデアを提案しました。
そして、回路自体: 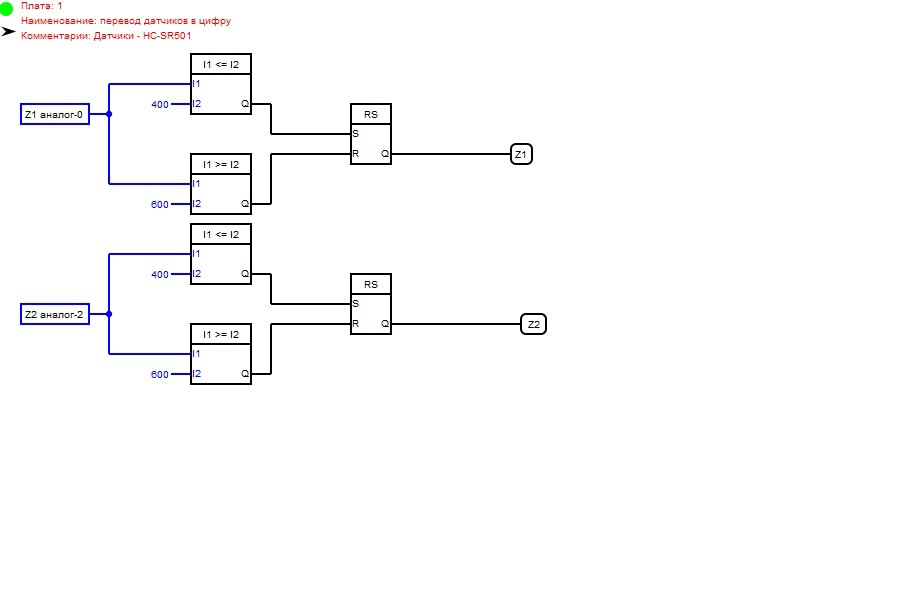
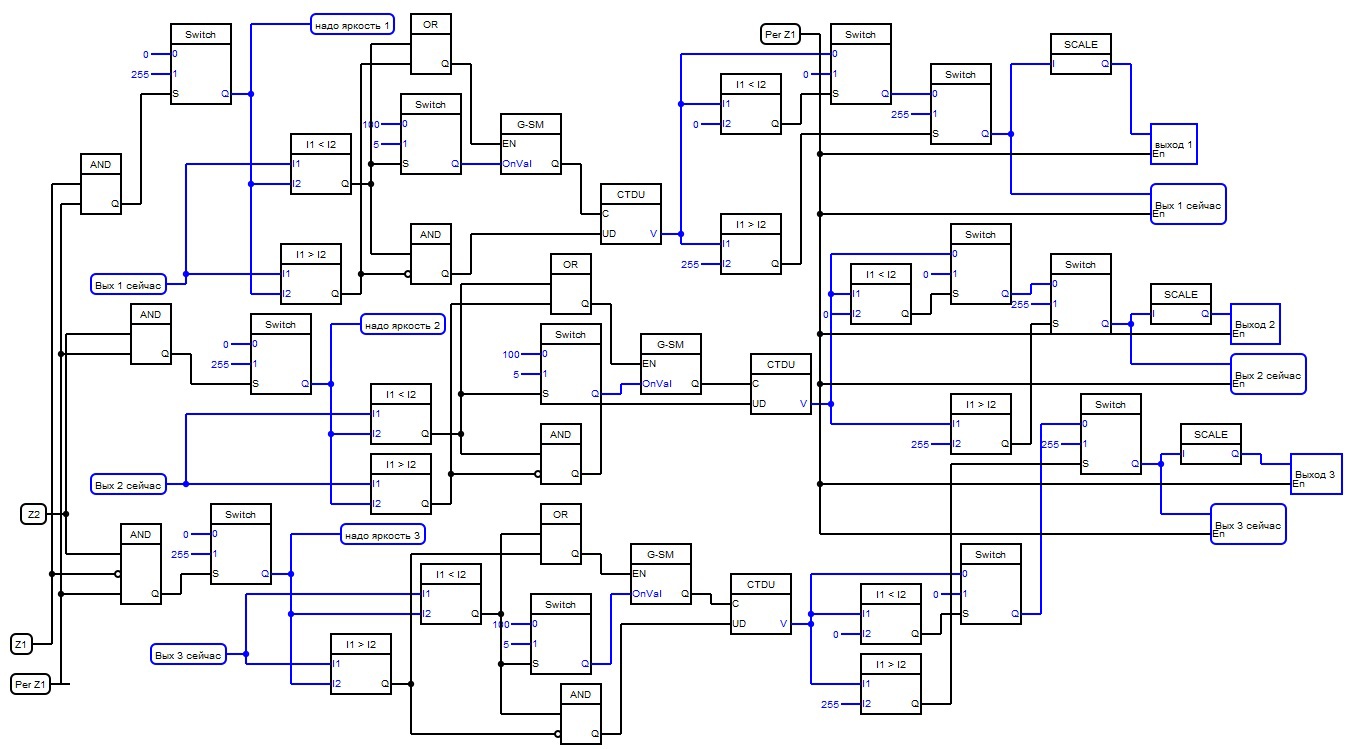
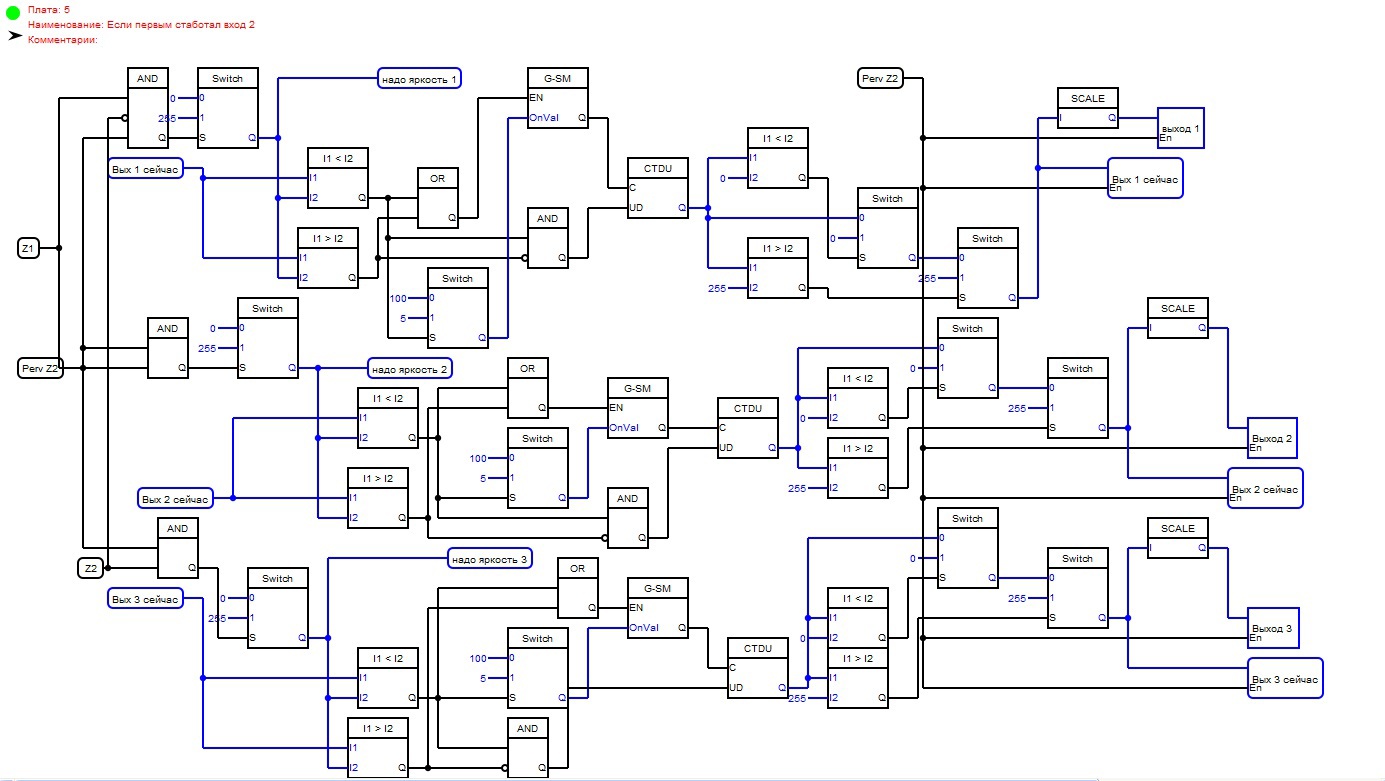
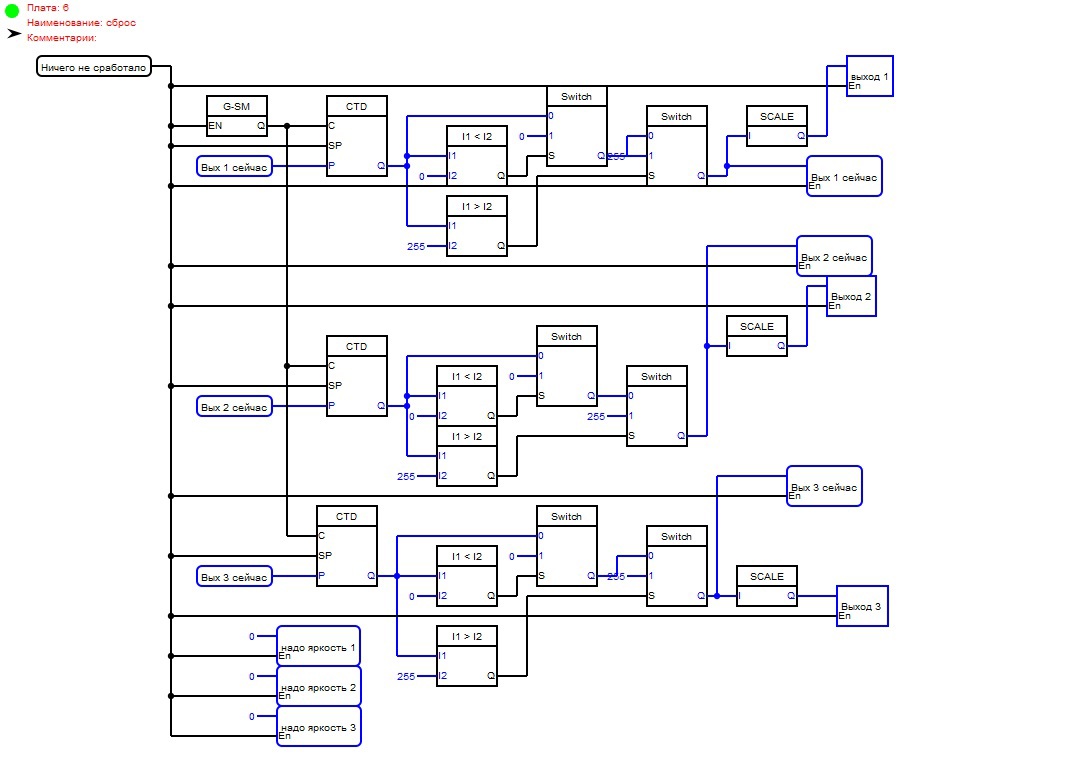
回線はすでにインストールされ、動作可能です。 質問がある場合、私は答えようとします。 コードをscらないでください、私はプログラマーではありません。
PSプロジェクト自体: flprog.ru/images/hostingFiles/118191721.flp
作成者:Vyacheslav Mikhailov
プログラム可能なミニパドル
中国のサーボモーターのおもちゃのマニピュレーター。 ゴミ箱とArdiunoコントローラーから文字通り「膝の上に」組み立てられました。 コントローラープログラムは最大10ステップを記憶します。 必要な回転角度に応じて、サーボ速度の動的制御ユニットがプログラムに挿入されています。
プログラム 。