
みなさんこんにちは。 マイクロコントローラを使用して、つまり射撃場のターゲットの巻き上げメカニズムを復活させる興味深いプロジェクトをたまたま実装したため、作成した結果を共有することにしました。
毎日そのようなプロジェクトがあるわけではありません。 一番下の行は次のとおりです。 ターゲットを射撃するための4つのリフティングギアがあり、射撃の練習に応じて、オペレーターは各ターゲットのリフティングを遠くから制御する必要があります。 オペレーターが準備モードでターゲットを設定した後、射手はショットを発射できます。 リフト機構には、衝撃を記録する衝撃センサーが装備されています。 センサーがヒットを検出するとすぐに、影響を受けるターゲットを下げます。 このタスクを実装するのに特に困難はありません。 しかし!..
ほとんどの場合と同様に、これらのメカニズムに関するドキュメントはありませんでした。 吊り上げ機構自体は解体され、オペレーターへのマルチコアシールドケーブルはありませんでした。
ターゲットを最大300メートルの距離で設置できることを考えると、この長さのマルチコアシールドケーブルを購入すると、価格が非常に高くなります。 嘆かわしい状況を評価して、彼らはそれから抜け出す方法を探し始めました。
お客様と話をした後、次のことに気付きました。 オペレータに向かうワイヤを使用せずにターゲットを制御するために、リフティングターゲットのリモート無線制御を実装することが決定されました。
無線モジュールを使用して自分でリモコンを作成するか、タスクに適した安価な既製の無線拡張機能を購入したかったのです。 しかし、無線エクステンダーは、相談することなく、顧客が自分でそれを購入しました。

このリモートコントロールを使用すると、最大3,000メートルの距離で見通し内のリモートコントロールが可能になります。 そしてこれは、315 MHzの周波数で、10ミリワットの送信機の電力を使用します。 私は受信機自体の感度に関するデータを見つけられず、それを測定するという欲求も必要もありませんでした。 予想通り、このデバイスを見通し線でテストしたとき、自信を持って操作できるのは150メートルでした。 しかし、300が必要です! このデバイスを少し活用し、アンテナの設計を(アンテナを調整および調整したX1-50キャラクタグラフの助けを借りて)1/4波長ダイポールに変更して、無線モジュールの範囲を大幅に拡大することができました。 したがって、このリモートコントロールと左。
無線リモートコントロールが要件を満たした後、顧客は各ターゲットにこのリモートコントロールを装備して、各ターゲットを独立して制御できるようにしたいと考えました。 4つのリモートを使用するかどうかの議論が始まりました。 一方では、各ターゲットを独立して制御することには多くの利点がありましたが、4台のリモコンを購入すると、使用するのに不便であるだけでなく、さらにお金が無駄になります。 どの射撃エクササイズを使用するかを議論しましたが、実は3つしかありませんでしたが、彼らはリモートコントロールが必要であるという結論に達しました。 他のすべての操作は、マイクロコントローラーに割り当てられました。
射撃演習:
最初の演習:
10秒の時間間隔で3つのターゲットが同時に発生します。 割り当てられた時間内にシューティングゲームがターゲットをヒットする必要があります。 シューティングゲームがヒットすると、ターゲットがドロップします;割り当てられた時間の終わりに、残りの影響を受けていないターゲットもドロップします。 演習は終了しました。
2番目の演習:
3つのターゲットが無制限の時間間隔で同時に上昇します(キャンセル演習を押すまで)。 3つすべてのターゲットでヒットが発生するとすぐに、4番目のターゲットが上昇し、ヒットするまで保持されます。
3番目の演習:
この射撃演習は、マイクロコントローラー用のプログラムを作成するという点で最も困難です。 射撃演習には3つのターゲットが関係しています。 運動は3つの目標が完了したときに完了したと見なされ、すべての目標が参加する必要はなく、1つの目標を3回完了できます。 このターゲットは6秒の間隔で3回連続して上昇し、残りの2つはまったく参加しません。 または、2つのターゲットが6秒の時間間隔で同時に上昇し、その後低下する可能性があります。 その後、3つのターゲットのうちの1つは、シューティングゲームなどでヒットしない限り上昇できます。ターゲットは、シューティングゲームでヒットした場合にのみ上昇します。 一般に、ターゲットはこの演習の新しい開始ごとにランダムに動作する必要があり、可能であれば連続して繰り返さないでください。 まださまざまな条件がありますが、全体のプロセスについては説明しません。このため、設計の瞬間と動作中のリフティングメカニズムの動作の両方を確認できるビデオを撮影しました。 マイクロコントローラ用のプログラムを書くのをいじらなければならなかったことが一つあります。
ユニットの人員が不足していることを考えると、マイクロコントローラーのリフト機構の制御を組み立てることにしました。 1つのユニットがリーダーとして機能し、USARTの他のユニットと通信して、各ホイストの動作を制御しました。 残りのリフト機構は駆動され、シールドケーブルを介してマスターに接続されました。
特別なデータレートは必要ありませんでしたので、9,600 bpsの標準データレートを選択しました。 また、トグルスイッチの助けを借りてリードユニットで、射撃演習が選択されました。

連続励磁コレクターモーターの制御で問題が発生しました。 構造的に、リフト機構は、ターゲットを特定のポイントで停止する必要があるように設計されています。 そうしないと、自重でターゲットが前後に傾く可能性があり、これはもはや良くありません。 コレクターモーターをオフにするだけでは不十分でした。 ギアボックスの慣性により、動きは継続しました。 このため、コレクターモーターのダイナミックブレーキを実装しました。 エンジンは固く即座に停止しました。
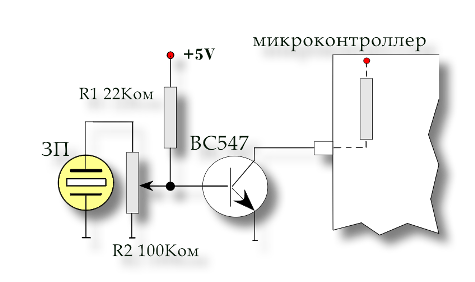
ターゲット用の衝撃センサーがないため、その製造について疑問が生じました。 衝撃センサーの製造には、圧電センサーが使用されました。 スキームに従って、マイクロコントローラーに接続すると、センサーは非常によく現れました。 可変抵抗器を調整することで、衝撃に対するセンサーの感度を調整できます。
衝撃センサーの構築における次のステップは、持ち上げ機構のターゲットが交換されるため、ターゲットにそれらを取り付ける方法の問題でした。 これは、ショックセンサーをそれぞれターゲットから簡単に取り外してマウントする必要があることを意味します。 マウントはクランプ原理に従って作成され、センサーはターゲットの底部に固定されました。 リフティングメカニズムが地表より下にある場合、センサーは弾丸の影響を受けません。

このビデオでは、デバイスの建設的な瞬間と作品自体をより明確に示しています。