開始する理由
Microsoft Developer Tour Technology Expeditionの一環として、MicrosoftとIntelがニジニノヴゴロドで実施したハッカソンについてお話したいと思います。 直接話してください。 メンバーとして。 一番面白いと思います。
IoT-モノのインターネット(モノのインターネット)、ニジニノヴゴロドで開催される予定だったハッカソンのテーマ。 正直なところ、私にとってこの用語は新しく、基本原則を理解するためにグーグルで検索する必要がありました。 それは非常に簡単であることが判明しました。いくつかのセンサーから情報を収集し、アクセスと処理のためにインターネットに送信するデバイスがあります。
ハッカソンがツアーの一環として開催されるという事実は、イベントから間もなく学びました。 ハッカソンでは、Intel Galileoボードを使用して何かを作成する必要があると書かれていました。
それは非常によく一致したので、約1か月前にIntel GalileoとIntel Edisonに関するIntelカンファレンスに参加しました。 Intel Galileo Gen 2ボードはどこで入手しましたか?ありがとう! しかし、彼女の手は彼女に全く届かず、彼女は単にテーブルに横になりました。 もちろん、有名な中国のサイトでセンサーとシールドを注文しましたが、まだ届きません。
Intel GalileoとIntel Edisonについて一言。 これらは、Arduino Uno R3とピン互換性のあるボードです。 標準のセンサーとシールドを挿入できます。 arduinoからスケッチを実行する開発ツールがあります。 そして、ここで、これらのボードがより高価で消費量が多い場合、なぜこれらのボードが必要なのかという疑問が生じるかもしれません。 告白しますが、最初からそう思っていました。 しかし、熟考すると、これらのボードの目的は完全に異なるという結論に達しました。 Arduinoと16 MHz、およびIntel Galileo Gen 2と400 MHzを比較してください。 2 KB RAMメモリと256 MGB DDR3。 Intelには、組み込みの100 Mbpsネットワークインターフェイスと動作するLinuxもあります。 それらを比較する必要はありません、それらは異なるタスクのためです。
詳細はこちら: habrahabr.ru/company/intel/blog/248279
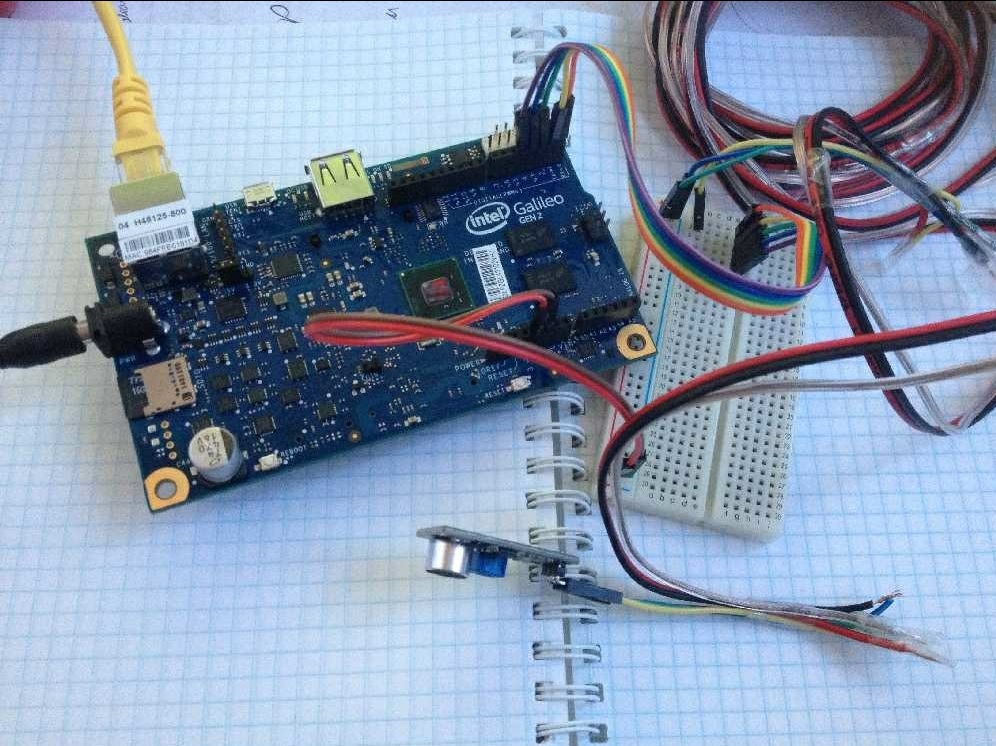
一般的に、Intel Galileo Gen 2ボードがあり、それは箱の中にありました。 Arduinoのように、このボードの経験はありませんでした。 そして、これはハッカソンです。
ハッカソンの数日前、この指示に従ってボードにLinuxをインストールすることにしました: habrahabr.ru/company/intel/blog/248893
ローカルネットワーク経由でSSHを介してボードに接続します。 普通のLinuxがあります。 すべてがうまくいき、すべてが機能します。 私はインターネットから簡単なC ++の例を作成しましたが、これは組み込みのLEDで点滅します。 すぐには動作しませんでした(コンパイルオプションで-lmraaを指定するのを忘れていました)。 やった! すべてが機能し、眠りにつくことができます。
ボードが機能したら、何かを接続してみることができます。 arduinoのために何かを買えるかどうかを確かめるためにラジオ市場に行きました。 ブレッドボード、ワイヤーを買いました。 詳細の一部、一部のセンサー。 しかし、私は何もテストしませんでした、再び私の手は届きませんでした。
アイデア
この数日で、このボードに実装できるブレーンストーミングセッションがありました。 LEDを点滅させたり、部屋の温度を測定したりするような単純なものは望まなかった。 これはすべて以前に既に行われており、Intel Galileoはそのようなタスクには強力すぎます。 大きな計算、データ処理、さらに処理または分析のためにサーバーに送信するものが必要でした。
そして、次のアイデアが徐々に思い浮かびました。 何年も前、Computerra誌に、ショットなどの大音量の音源の位置を特定するための実験技術に関するニュースがありました。 路上にはマイクがあります。 彼らは音を知覚し、音がすべてのマイクに同時に到達するわけではないという事実のために、遅れて、音源の位置を見つけることができます。 そのようなシステムを作成することにしました。
アイデアがあります、あなたはセンサーを買うためにラジオ市場に行くことができます。 グーグル、サウンドセンサーには2種類あることがわかりました。 最初はデジタル出力で、しきい値を超えることに応答し、それぞれ3つの接点(グランド、+ 5、信号しきい値)を持っています。 2番目のセンサーには、さらにアナログ出力があり、それに応じて4つの接点(グランド、+ 5、信号しきい値、アナログ信号)があります。 アナログ信号を生成する2番目のものが必要でした。 複数のセンサーから信号を受信すると、それらを重ね合わせて、一致を見つけて遅延を正確に決定することができます。 さて、トリガーしきい値を動的に検索します。 センサーにワイヤーが必要です。 各10メートル。 念のため。 市場でサウンドセンサーを見つけましたが、リードは3つしかありません。 他にはありませんでした。 売り手は、彼らの出力がアナログであることを保証しました。 まあ、信じてください、なぜチューニング抵抗があるのですか? 5つのセンサーを取りました。 今、ワイヤー。 50メートルの赤黒のサウンドワイヤ0.25 mmと30メートルの光(0.25 mm、ダブル)。 私は各センサーを頼りに、電源用に赤黒を開始し、信号用に光のペアの1つを開始しました。
OK、すべてがそこにあります。 それはすべて木曜日で、土曜日にはすでに会議がありました。
自宅でセンサーを接続しようとしました。 初めてボードに何かを貼り付けるのが怖いとき、それは突然燃え尽きます。 しかし、何も、立ち往生、煙がない、コンソールが動作しています。 センサーからアナログ値を取得しようとしています。 驚いたことに、センサーはバイナリであることがわかりました。 信号レベルの超過にのみ応答します。 そして、このレベルはボード上のチューニング抵抗によって設定されます。 ああ! 金曜日の翌日は、市場にとって意味がありません。 正しいセンサーがそこにあるかどうかはわかりません。 はい、かつて、あらゆる種類のもの、またラップトップを置いてグリッドを構成するVisual Studioもあります。 市場はさらに半日かかります。 そして、土曜日の午前9時からのカンファレンスでは、まだ眠る時間があります。
金曜日の夜、10時に家に着いたとき、私はすべてを準備し始めました。
ハッカソンの場合、必要なものをすべて用意するためだけに決めました。 多くの参加者がいるため、延長コード。十分なソケットがない可能性があります。 ルーター ボードはネットワークケーブルを介して接続する必要があります。 USBモデム経由でインターネットに接続するには、ルーターも必要です。 一般的に、完全な自律性。 数時間会うと思った。 Visual Studio 2013 Communityをインストール用にインストールしました。 VC 2015のインストールを拒否しました。 したがって、ハッカソンに持ち込む必要があるすべての腺の準備と収集は、計画された数時間ではなく、午前4時まで続きました。 はい、8時に起きます。
その結果、彼は彼と一緒に取りました:延長コード、粘着テープ、青い電気テープ(はい、同じもの)、長いワイヤー、ブレッドボードとセンサーの接続ワイヤー、はさみ、ルーター、5つの音響センサー、USBモデム、振動センサー、巻尺。 すべて、寝る時間です、私たちはそこで理解します。
魔法のミステリーツアー

会議では多くの報告がありました。 多様で興味深い。
WebGLとBabylon JSライブラリについての講演がありました。これらを使用すると、ブラウザで3Dで簡単に描画できます。 アイデアは良いです。後でハッカソンでプロジェクトに固定してみてください。
会議は19:00に終了し、ハッカソンはポリテクニックの建物で20:00に始まりました。 歩くことができます。 途中、私はピザを買ってスナックを食べました。
ハッカソン
だから20:00、私はその場にいます。 ホールは広いです。 大学の最前列に座っていたので、中央の最初のテーブルを占有します。 私の鉄片には、テーブル全体が必要です。


hackathonページの写真events.techdays.ru/msdevtour/news#fe58625b-bcd9-498a-94e8-161ccc286f11
20:00から00:00まで、MicrosoftおよびIntelによるIoTおよびAzureについての講義。

インテルからガリレオとエジソンについての講義がありました。 1つは、Azureの使用に関するものです。 彼が知っていることとその使い方。 これが最も重要なことでした。なぜなら、この瞬間まで私はAzureで働いたことがないからです。
Dmitry Soshnikovは、MicrosoftがIoTをどのように見ているかを語った。 これは、センサーから一部のデータを収集してクラウドに転送し、受信して分析できる小さなデバイスです。 私のプロジェクトはこれらの要件をすべて満たしたばかりで、それを実装するために残りました。
講義は無駄に時間を無駄にしないように行っていましたが、信号源の位置を決定するために必要な式を導き出すことにしました。
私たちのタスクは、センサーから受信した遅延時間に最適な空間内のポイントを見つけることです。 つまり、未知数よりも多くの変数がある可能性がある最適化問題です。 たぶん、最小二乗法のようなものでしょう。
依存関係を書き込み、出力を開始しました。 彼は2ページを書き留めて、私は4度の方程式を解くのが面倒で、すべての時間を費やすことができ、間違いがあるかもしれないことに気付きました。 そして、それはなんとなく悲しくなりました。
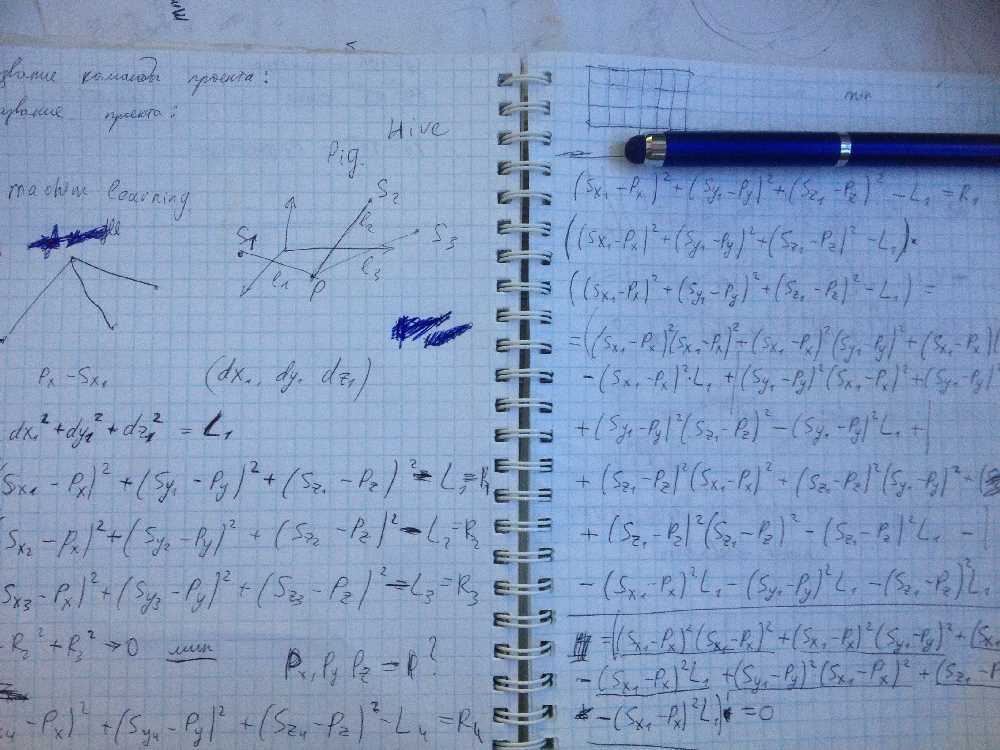
その結果、私は普遍的な方法、徹底的な検索の方法で行動することにしました。 観客の大きさは、10 x 10メートル、10 x 10 x 10立方体、10 cmの精度で、100万ポイントを獲得しました。 たくさんありますが、おそらくプロセッサがそれを処理できます。 その場合、精度が低下する可能性があります。
それで、講義は終わりました。誰もがプロジェクトを考え出し、チームを編成する必要があります。 ホールには60人がいました。
チームのプレゼンテーションが始まりました。 3番目に行きました。 私のプロジェクトが何であるかを簡単に説明し、すでに費用がかかっていると言ったので、プロジェクトを一人で行うつもりです。 サウンドセンサーは触手のようなものであるため、名前はAudio sprutです。
すべてが彼らのプロジェクトについて語った。 人々は歩いてプロジェクトに参加し始めました。
さあ、始めましょう。 最初のステップは、時間を正確に決定することでした。 最初のオプションは、サイクルが完了したステップの数をカウントすることです。 ただし、ここでは、サイクルの各ステップにかかる時間を決定する必要があり、これはあまり正確ではありません。 高精度のタイマーを見つける必要がありました。 C ++ 11には何かがあることを思い出しました。 インターネット検索が解決策を提供しました。
したがって、センサーを操作するためのアルゴリズムは次のとおりです。 いずれかのセンサーに信号が表示されるまで、すべてのセンサーに問い合わせます。 彼の時間をゼロにします。 次に、残りのセンサーに問い合わせて、いずれかのセンサーに信号が表示されるとすぐに、現在の時刻を記録します。 すべてのセンサーが信号を発するまで、この調査を実行します。 各センサーで取得した時間に基づいて、距離のデルタを求め、音の速度に時間を掛けます。
測定により、デジタルセンサーは83 kHzの速度で尋問されることが示されました。 これにより、5つのセンサーで約2 cmの精度が得られます。 興味のために、アナログ読み取りの速度を測定しました。 約4 kHz。
私が買ったセンサーは、私が欲しかったものではないが、私の仕事を簡素化しているようだ。 第一に、アナログ信号間の対応を探す必要がなく、第二に、精度が高くなります。
しかし、Linuxはリアルタイムオペレーティングシステムではないことにも留意する必要があります。 したがって、システムがコードだけで占有され、他のシステムに切り替わることは保証されません。 ここでは、もちろん、2つのコアを持つIntel Edisonが役立ちます。 しかし、それはそうです。
テストでは、約15センチメートルという短い距離にある2つのセンサーを使用し、一方のセンサーの側面から男性をクリックし、もう一方のセンサーからクリックしました。 同時に、信号が遅れ、距離の計算されたデルタが現実と一致していることがはっきりと見えました。
自分のボードと構成済みのルーターがあるため、WiFiの動作に依存しませんでした。 しかし、大きな問題がありました。私のインターネットは時々ひどいものでした。 時々、速度は100 kBit / sに低下しました。
今日は曇りのはず
したがって、プログラムは音源の位置を決定し、この情報をクラウドに送信します。
最も簡単なオプションは、イベントを介してデータを送信することであると言われました。 サーバーに何かを送信するためのPythonスクリプトを見つけようとしています(以前にpythonを実行したことがありません)。 最初に、スクリプトはサーバーからの応答でエラーをスローします。 近隣のチームもデータを送信しようとしており、使用できません。 長い間探し回ったら、答えは201なので、エラーはなく、データが転送されました。 Azureにアクセスしますが、データは表示されません。 申し立てはありますが、データは表示されません。 私は長い間それを理解しようとします、私は主催者に尋ねます、そしてそれはイベントが私に合わないことがわかります。 削除されると考えられる場合、それらは使い捨てです。 サプライズ! そして、何を使うべきですか? テーブル。
素晴らしい、最初からすべて。 テーブルではそれほど単純ではありません。 Azureのインターフェイスはあまり直感的ではありません。 詳細はもう覚えていませんが、サーバーがそれを作成し、テーブルを作成しました。 次に、そこにデータを書き込みます。 そして、判明したように、これはそれほど些細な作業ではありません。 メッセージに似たコードは機能しません。 驚くべきことにチーム間で実行して全員を支援したタチアナ・スメタニナと話をした後、データベースが標準であり、何らかのMySQLと同様に作業できることが明らかになりました。 データベースに接続してINSERTを実行します。 少し残っています。 接続方法 C ++から、私は欲求がありません。 Python私はあまり知りません。 しかし、Gagileoにはperlがあります。 いいね! 小さなテストスクリプトを作成しようとしています。 ただし、DBIモジュールはインストールされていません。 cpanを開始します。 私のインターネットは減速していますが、何かが揺れ動いています。それはすでに素晴らしいことです。 しかし、約20分後のインストールの最後に、一部のライブラリまたはモジュールが欠落していることがわかりました。 同様に、このライブラリを配置しようとします。 他のものを入れようとしています。 時間がなくなり、何も機能しません。 それは残念です。 私が理解しているように、隣人は似ています。 すべてが何らかの形で複雑でしたが、プレゼンテーションは数行でシンプルでした。 そして、RESTプロトコルを介してデータベースにアクセスできることがわかりました。そのためには、Azureでモバイルクライアントを作成する必要があります。 頑張って 繰り返しになりますが、インターネット上の検索の束。 pythonで例を見つけました。 そして、見よ、彼は基地に書いた! Azure Webサイトには、Galileoが送信するデータが表示されます。 すばらしい、C ++からの呼び出しをシステム関数に追加します。この関数は、パラメーターを使用してpythonスクリプトを実行します。 それだけです この部分は忘れてください。 次に、JavaScriptを使用してデータベースからデータを読み取る方法を学習する必要があります。
ベース、データを提供してください!
ブラウザの文字列にテーブルのアドレスを入力すると、ブラウザはデータ付きのJSONを表示します。 すべてが素晴らしいです。 データを解析するために残ります。 JavaScriptで小さなローカルhtml-kuを作成しています。これにより、プレートが読み込まれ、ページに表示されます。 動作しません。 利用可能なデータはありません。 何かが来るが、それは明確ではない。 私は理解し始めています。 ブラウザのデバッガーは、いくつかの権利について何かを書きます。 それと何の関係がありますか? 通常のアドレスでは、すべてが表示されます。 突っついて、探して、突っついて、探して。 なぜ機能しないのかは明確ではありません。 どのような試みかわからなかったので、モバイルインターフェイスを操作するために、Azureページに記載されていることをステップごとに実行することにしました。 ローカルWebサーバーを起動することをお勧めします。 数行でDelovですが、どういうわけか私はローカルでサーバーが好きではありません。 さて、他のすべてが失敗した場合、指示をお読みください。 書かれているとおりにすべてを行い、すべてが機能します。 スクリプトを含むローカルページがデータを受信し、画面に表示します。 やった! もちろん、インターネット上のAzureにあるWebサーバーが必要でしたが、すでに十分です。
バビロン、しかし5ではなくJS
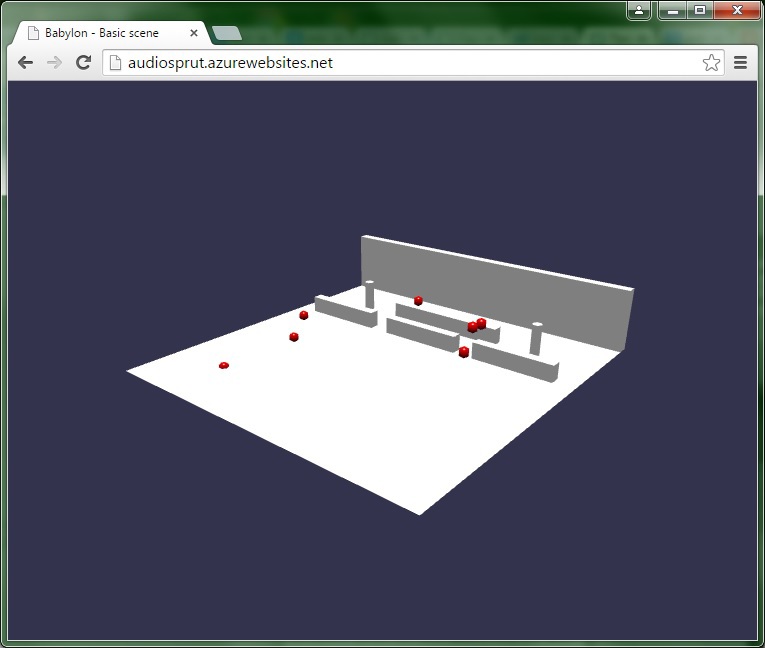
データがあります。BabylonJSに基づいて3D視覚化を固定する必要があります。
座っているテーブルのサイズを測定して、部屋の正しい3Dモデルを作成します。 長さ106センチの1セクション。 つまり、テーブル全体は2メートルです。 素晴らしい。 テーブルと通路を備えた3つのブロック、それは10メートルになります。 わかった 前壁、最初の列のテーブル、オーガナイザーのテーブルをステージに追加します。 部門。 ブラウザではすべてが正常に見えます。 センサーをどこに置くかを考えます。 見積もりをしている間、何かが収束しないことがわかりました。 テーブルは、1メートルの2つのセクションではなく、4つのセクションで構成されています。 また、テーブルの3つのブロックは10メートルに収まりません。 外の観客のサイズを測定して、廊下に巻尺を取ります。 16メートル。 すべてを再描画する必要があります。
昼食 いいえ、昼食なしで我慢できます。 少なくとも30分ですが、役立ちます。
すべてが機能します。 ポイントの位置を含むデータが読み取られますが、ローカルページからではなく、サイトからデータを取得することに苦労する可能性があります。 探している、探している、長い間探している。 次に、セキュリティ設定のどこかで、サイトへのアクセスがローカルホストでのみ許可されていることに気付きます。 はい、確かに、MySQLには似たようなものがあることを思い出します。 許可されたホストにサイトアドレスを追加すると、すべてすぐに機能しました。 やったー すべてを管理しました。 まだ1時間以上あります。
(データの追加と受信の実験中、アクセスはすべてのユーザーに対して完全になるように構成されていたことに注意する必要があります。したがって、データ追加スクリプトでアクセスキーが指定されていません。
最終準備、一括での時間
すべてが機能し、センサーがデータを受信し、ボードが位置を計算し、クラウドに送信し、サイトが視覚化を行います。 長いワイヤーをセンサーに取り付けて、観客の中で互いから遠く離れて配置し、設定ファイルで空間内の絶対位置を設定することだけが残っていました。 デスクの端に2つのセンサーを配置し、レポート用に部門に2つのセンサーを配置し、1つをメインテーブルの中央に配置する予定でした。 これには1時間かかりました。 大量の時間、私は考え、そして二重線を引き裂き始めました。 最初の2つのセンサーへの配線は3メートルでなければなりませんでした。
ワイヤーが破れた。 ペアワイヤを3本にするために、ペアワイヤを1本で折り畳む必要があります。 私はそれらを一緒にねじり始め、半メートルごとにテープで固定します。 これにはすべて10分かかりました。 私はそのようなペースで間に合わないことは明らかです。 ワイヤの準備はできていますが、ギャップの新しいワイヤを含めて、センサからワイヤを伸ばす必要があります。 テープをきれいに、ねじって、巻き上げます。 ボードに接続すると、センサーが動作します。 OK、次の手順に進みます。 すべてに十分な時間がないことは間違いないので、センサーを3つだけ残すことにします。 ワイヤーで3メートル、3メートル、8メートル。 最後の8メートルはもうテープで固定されておらず、少しねじれています。 私は急いでいる、これは非常に悪いです。 ワイヤーをきれいにすると、自然に壊れます。 修正しました。 やった センサーを接続します。 LEDは点灯していますが、点灯してはいけません。 ワイヤーを見て、センサー出力に+5を、すぐにLEDに適用しました。 まあ、私はそれが燃えたかもしれないと思う。 ワイヤーを正しく変更しても、センサーはまだ赤く光ります。 正確に焼かれた! 私はもう一つ取ります。 予備があります。 接続します。 また、赤く光ります。 チューニング抵抗は役に立ちません。 元気? わかった。 ボードに正しく接続されていないことがわかります。 まあ、ボード上のポートを焼いたかもしれません。 これで終わりです。デモでは終わりません。 もう一度すべてを確認し、すべてを正しく接続します。 そして見よ、すべてが機能します。 そして、レポートの始まりである16:00に。 二番目。
報告書
Azure Webサイトでプロジェクトを管理できたのは良いことです。プレゼンテーションのためにラップトップを接続する必要はありません。 また、ルーターを介してボードに接続されているため、無効にすることは困難です。 私はプロジェクトについて話します。 ボール、信号ソースの以前のデバッグ位置を使用して、観客の3Dモデルを示します。 私は手をたたきます。 コンソールからのログで、データがなくなったことを確認できます。ブラウザを再起動します。 新しいポイントが表示されるはずでしたが、正直なところ、どのポイントがどのポイントで、どれがそうではなかったかを覚えていません。 それだけです
最初の1人であることは非常に素晴らしいことです。その後、座って他のレポートを静かに聞くことができます。 レポートは異なっていました。
それだけです。 そうそう、私はハッカソンの勝者の一人になり、賞を受賞しました。
一般的な印象
気に入った。 興味のあるこのような大勢の人々。 そのうちのいくつかと話をしました。
ハッカソンのおかげで、そうでない場合、Intel Galileoをいつ開始するかはわかりません。 そして、Azureに到達するには、これは一般に不可能です。 多くのことを学びました。
全体として、MicrosoftとIntelに感謝します。
そして結論として、ハッカソンで持っていたコードを変更せずに持ち込みます。
ファイル:
dist1.cpp
#include "mraa.h" #include <ctime> #include <ratio> #include <chrono> #include <vector> #include <iostream> #include <stdlib.h> #include "funcs.h" int main() { init(); int waitId = 0; const int numMics = NUM; // std::cout<<"Num sensors="<<numMics<<std::endl; // return 0; mraa_gpio_context gpio[numMics]; bool on[numMics]; int dist[numMics]; // std::chrono::high_resolution_clock::time_point times[numMics]; std::chrono::duration<double> times[numMics]; for( int k = 0; k < numMics; k++ ) { gpio[k] = mraa_gpio_init(k); mraa_gpio_dir(gpio[k],MRAA_GPIO_IN); } do { std::cout<<"Wait..."<<waitId<<std::endl; waitId++; for( int k = 0; k < numMics; k++ ) { on[k] = false; dist[k] = 0; } auto numOn = 0; int currStep = 0; std::chrono::high_resolution_clock::time_point startTime; do { for( int k = 0; k < numMics; k++ ) { if( ! on[k] ) { int v = mraa_gpio_read(gpio[k]); if( v == 0 ) { std::chrono::high_resolution_clock::time_point now = std::chrono::high_resolution_clock::now(); if( numOn == 0 ) { currStep = 0; startTime = now; } on[k] = true; dist[k] = currStep; times[k] = std::chrono::duration_cast<std::chrono::duration<double> >(now-startTime); numOn++; } } } currStep++; } while (numOn < numMics && (currStep < 8000 || numOn < 1) ); if( currStep >= 8000 ) continue; for( int k = 0; k < numMics; k++ ) { printf("%d ",dist[k]); } printf(" === time(s): "); for( int k = 0; k < numMics; k++ ) { printf("%f ",times[k].count()); } printf(" === dist(m): "); std::vector<float> L; for( int k = 0; k < numMics; k++ ) { float d = 300*times[k].count(); L.push_back(d); printf("%f ",d); } Point3 event = getPosition(L); std::cout<<"Event=("<<event.x<<","<<event.y<<","<<event.z<<")"<<std::endl; char str[300]; sprintf(str,"./test_rest_add.py %f %f %f",event.x,event.y,event.z); std::cout<<"send data"<<std::endl; system(str); std::cout<<"send ok"<<std::endl; // create dists sleep(1); } while (true); for( int k = 0; k < numMics; k++ ) { mraa_gpio_close(gpio[k]); } return 0; }
funcs.h
#include <vector> struct Point3 { float x,y,z; }; struct DistPos { Point3 p; float dist; }; struct Box { Point3 p1,p2; float step; }; void init(); Point3 getPosition(std::vector<float> &dists); extern int NUM;
funcs.cpp
#include <vector> #include <fstream> #include <iostream> #include "funcs.h" #include <math.h> std::vector<Point3> sensorPos; int NUM = 0; void readSensorPos() { if( sensorPos.size() > 0 ) { return; } std::ifstream file("positions.txt"); if( ! file ) { return; } int num = 0; file>>num; std::cout<<"Num="<<num<<std::endl; for( int k = 0; k < num; k++ ) { float x,y,z; file>>x>>y>>z; Point3 point; point.x = x; point.y = y; point.z = z; sensorPos.push_back( point ); std::cout<<"x="<<x<<" "; std::cout<<"y="<<y<<" "; std::cout<<"z="<<z<<std::endl; } NUM = num; } void init() { readSensorPos(); } Point3 getPosition( std::vector<DistPos> dists, Box box) { std::cout<<"Box=("; std::cout<<box.p1.x<<","<<box.p1.y<<","<<box.p1.z<<")-("; std::cout<<box.p2.x<<","<<box.p2.y<<","<<box.p2.z<<")"<<std::endl; std::cout<<"dists.size="<<dists.size()<<std::endl; Point3 bestPoint; bestPoint.x = 0; bestPoint.y = 0; bestPoint.z = 0; float minErr = 10e20; float normDist[NUM]; for( float tx = box.p1.x; tx <= box.p2.x; tx+= box.step ) { for( float ty = box.p1.y; ty <= box.p2.y; ty+= box.step ) { for( float tz = box.p1.z; tz <= box.p2.z; tz+= box.step ) { float currErr = 0; //std::vector<float> normDist(dists.size()); int kk = 0; for( auto iter = dists.begin(); iter != dists.end(); iter++, kk++ ) { float dx = iter->px - tx; float dy = iter->py - ty; float dz = iter->pz - tz; float d = sqrt(dx*dx + dy*dy + dz*dz); normDist[kk] = d; // float err = d - (iter->dist * iter->dist); // currErr += err*err; } float minVal = normDist[0]; for( int k = 1; k < NUM; k++ ) { if( normDist[k] < minVal ) minVal = normDist[k]; } for( int k = 0; k < NUM; k++ ) { normDist[k] -= minVal; } currErr = 0; for( int k = 0; k < NUM; k++ ) { float delta = normDist[k] - dists[k].dist; currErr = delta*delta; } if( currErr < minErr ) { minErr = currErr; Point3 p; px = tx; py = ty; pz = tz; bestPoint = p; } } } } return bestPoint; } Point3 getPosition(std::vector<float> &dists) { Point3 p1,p2; p1.x = -5; p1.y = 0; p1.z = -5; p2.x = 5; p2.y = 3; p2.z = 5; float step = 0.1; Box box; box.p1 = p1; box.p2 = p2; box.step = step; std::cout<<"DistPos="<<std::endl; std::vector<DistPos> distPos; for( int k = 0; k < dists.size(); k++ ) { DistPos dp; dp.p = sensorPos[k]; dp.dist = dists[k]; distPos.push_back(dp); std::cout<<"("<<dp.px<<","<<dp.py<<","<<dp.pz<<") d="<<dp.dist<<std::endl; } Point3 bestPoint = getPosition( distPos, box); return bestPoint; } //const int NUM = 3; //float dist[NUM];
position.txt
3 2 1 3 -2 1 3 0 1 5
test_rest_add.py
#!/usr/bin/python import urllib import urllib2 import sys x = sys.argv[1] y = sys.argv[2] z = sys.argv[3] #print x," ",y," ",z,"\n" url = 'https://audiosprut.azure-mobile.net/tables/pos' params = urllib.urlencode({ "x": x, "y": y, "z": z, "present" : "true" }) response = urllib2.urlopen(url, params).read()
リンク: audiosprut.azurewebsites.net