次のプレゼンテーションでは、船舶用鋼で作られた6点のHEXAPODマニピュレーターの実装を示したいと思います。 現在のプロジェクトは、独創的で革新的なアプローチ、複雑な制御アルゴリズムの実装、動作の数学モデルの使用、および既存の効果的に機能するハードウェアの初期設計を装っていません。 現在の記事では、周辺都市の最も手頃な価格の手段と材料から、マニピュレーターの実装に対する独自のアプローチを述べようとしています。
この段階での主なバイアスは、ハードウェアコンポーネントに向けられたものであり、ソフトウェアの部分はそれほど複雑ではありません。 将来的には、BeagleBoard-xMを使用する予定です。BeagleBoard-xMは、自律動作モードと最小限のビデオデータ処理の組織です。 物理的には、すべてを同時に行うのに十分な時間はありません。 これはロボット工学における私の最初の経験であるため、デバイスの一部の側面は実装時にすでに検討され、調整されています。
マニピュレーターを作成するための前提条件は、カルトの象徴的なアニメーション映画Ghost in the shellでした。 20年近く前にリリースされたこの映画は、多くの人々、特に私に永続的な印象を与えました。 長年にわたり、一定レベルの技術的知識を獲得し、時間とある程度の無料資金を得て、私はロボット工学の分野から構築物を実装することにしました。
最初に、個人的な見解では、「ロボット」の標準的な概念が本質的に自律的な仕事のアルゴリズムに関連していることを予約します。 このデバイスは、人間の介入なしでは(現在のソフトウェアレベルで)機能できないため、「マニピュレーター」の定義が現在の記事で使用されます。
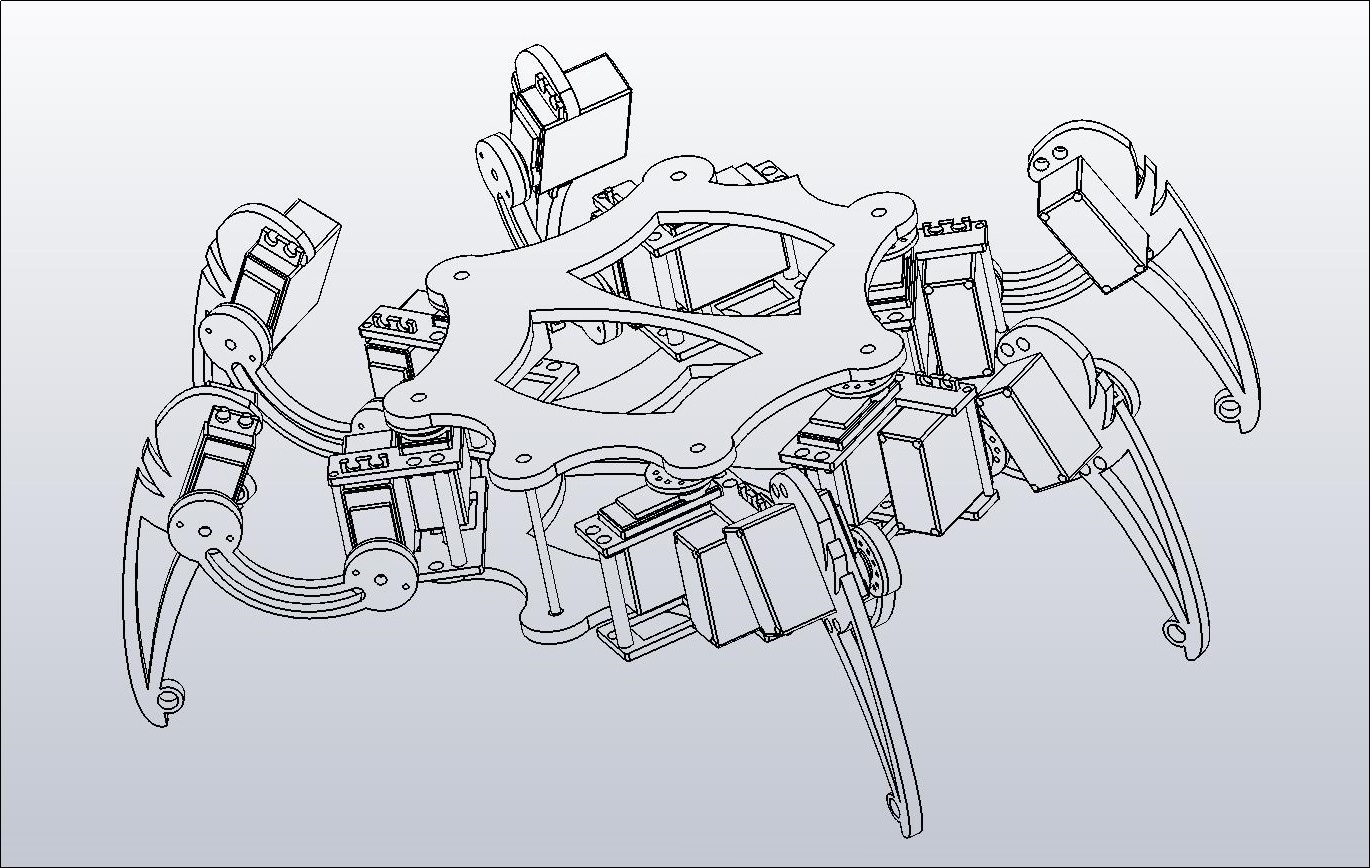
grabcad.comのオープンソースプロジェクトの1つが初期設計として選ばれました。 このような6点のデバイスに一般的な関心が寄せられる前でさえ、それは比較的長い時間でした。 したがって、その時点での既存のオープンプロジェクトの選択は大きくなく、同様のレベルの最初のロボット設計をゼロから開発することは非常に困難でした。 このプロジェクトは、構造物の重量を減らし、部品のエッジラインを簡素化する方向で完成しました。 以下は、SolidWorksソフトウェア製品のマニピュレーターの等角投影図です(修正の最後から2番目のバージョンの1つ。最新のものは、何年も後に発見できませんでした)。
当初は、マニピュレーターの材料としてアルミニウムを使用する予定でした。 しかし、当時の私の周辺都市の枠組みでそのような機会を見つけることはうまくいきませんでした(おそらく、数年後、この分野で何かが変わったかもしれませんが、私はそれを疑います)。 昔の遺産は救助に来ました-船の炭素鋼の残骸とそれに沿ってプラズマ切断の可能性。 さらに、SolidWorks 2007のプロジェクトは初期データとして適していたため、製造の準備が簡単になりました。 材料の厚さ-2mm。 プレキシガラスまたはプラスチック構造の製造は可能でしたが、当初は考慮されませんでした。 金属マニピュレーターを作りたいという願望は、物事の健全な見方よりも勝っていました。 しばらくして、詳細が届きました(品質について謝罪します。記事の一部の写真は古い電話で撮ったものです)。
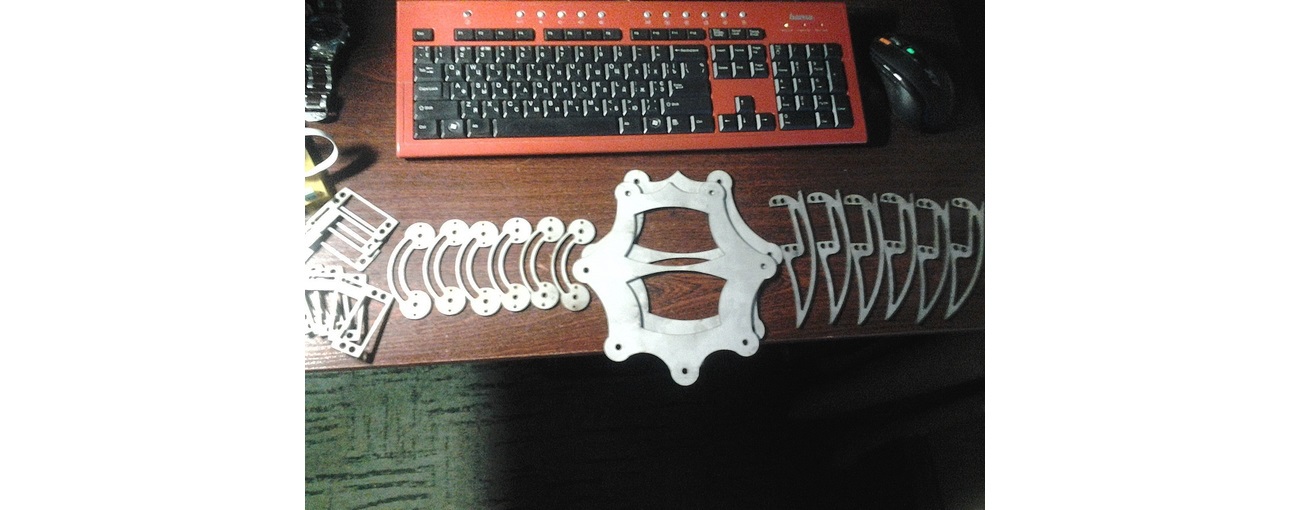
部品の外部検査の後、すべてがきれいに箱に折り畳まれ、「金属の残留張力を除去する段階」に送られました。 控えめに言うと、自由時間が足りないために非常に長い間延期されました。
しばらくして、再びマニピュレーターに戻り、電源システム、通信機器、サーボドライブの選択、電子機器の制御について考え始めました。 望ましい実装アプローチに基づいて、最終重量は非常に重要であると想定されたため、ある程度の労力をかけてサーボを選択する必要がありました。 ただし、コストも重要な役割を果たしました。 価格/品質比に基づいて、HK15328Aサーボは、金属製ギアボックス、ダブルボールベアリング、真鍮ブッシング、12.8 kg / cmの力、6.0 Vの電圧、重量58グラムで購入しました。 出来栄えは許容範囲です。ただし、防塵ガスケットはありませんが、制御ボードはケース内で自由に垂れ下がっていて、リード線は密閉されていません。注文したドライブの半分にはグリースがほとんどなく、わずかな負荷でわずかな加熱があります。 上記のすべては、ドライブのコスト〜7ドルで相殺されます。 18台のドライブが注文され、すべてが再構築され、グラファイトが潤滑され、負荷がかかった状態でテストされました。 長い間、これらのどれも失敗しませんでした。 以下は、HK15328Aサーボの内部の写真です。

注文時、アルミ製ロッキングチェアは在庫がありませんでした。 サイズに適した金属製のワッシャーで固定された、ドライブに付属のプラスチック製のロッキングホースを使用することが決定されました。 ヤスリで仕上げ、部品を研削し、ボール盤で作業し、タップを使用してサーボを取り付けた後、マニピュレーターフレームは次の形式を取得しました。

バッテリーとして12.6 V、9800 mAh、360グラムのリチウムポリマーバッテリーを使用しました。 バッテリーは、非常に安価な細い線で接続された3つの要素、各要素の充電コントローラー、充電プラグ、およびスイッチで構成されています。

充電コントローラーは、バッテリー電流を1Aに制限しました。 iMAX B6を充電器として使用することが計画されていたため、充電コントローラーが取り外され、要素を接続する導体が交換されました。 バランスの取れたバッテリー充電の可能性のために、各要素からの導体も撤回されました。 電圧変換器のうち、DC-DC Turnigy UBEC-15A、DC-DC Turnigy UBEC-7.5A、DC-DC Turnigy Micro UBEC 5V / 3Aが利用可能でした。 最初の2つはサーボに電力を供給するために使用され、最後のインバータは制御電子回路に電力を供給するために使用されます。
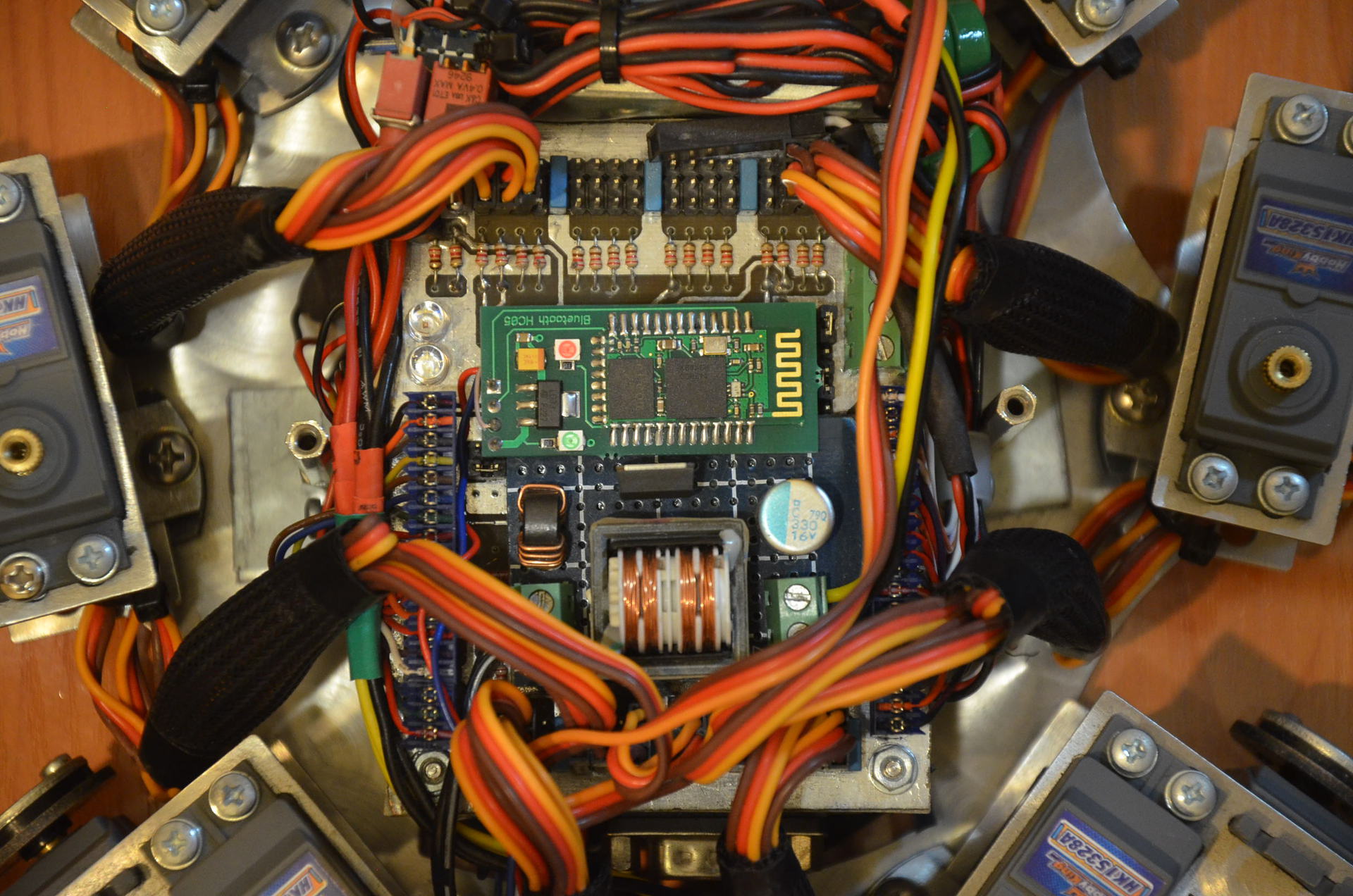
制御電子機器の役割では、LynxMotion-SSC-32社の非常に一般的なプロジェクトを使用するのが習慣でした。 RoboZone.suのWebサイトから一度に取られたMRC28ロボットコントローラーボードがあったため、その上に構築することが決定されました。 同じサイトで、SSC-32プロジェクトのMRC28の拡張カードが見つかりました。
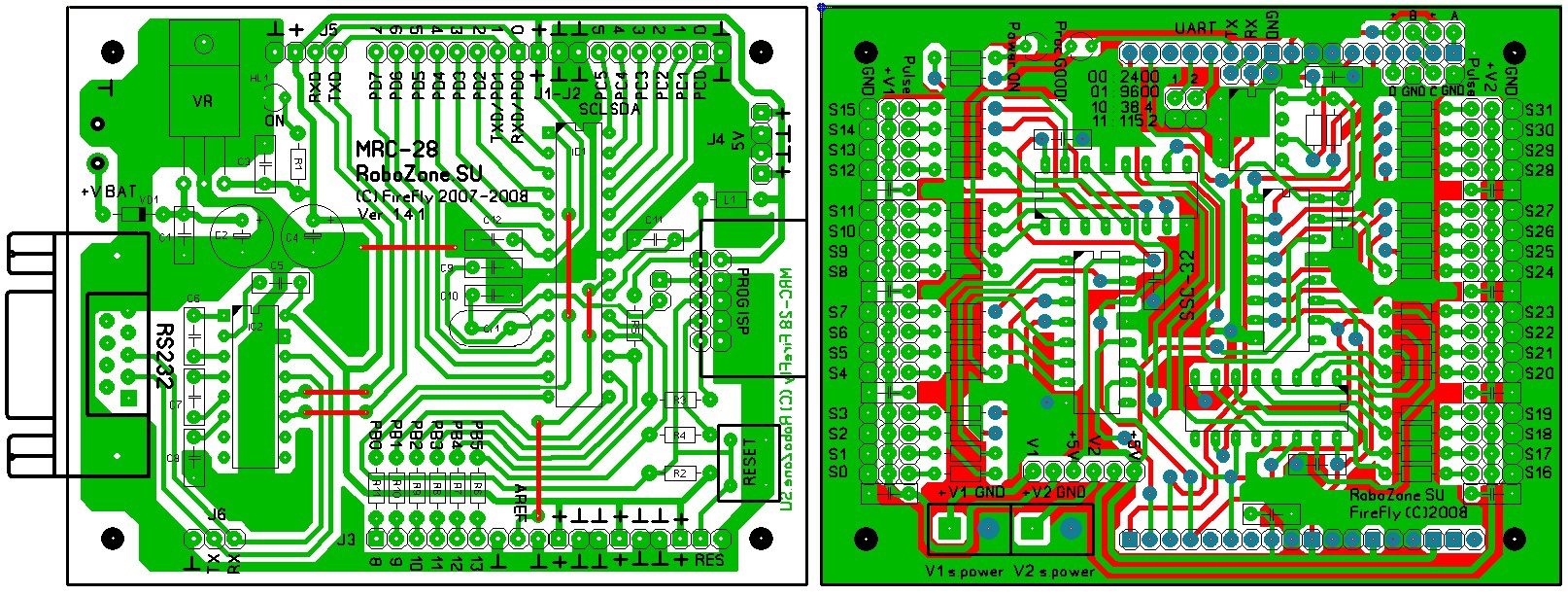
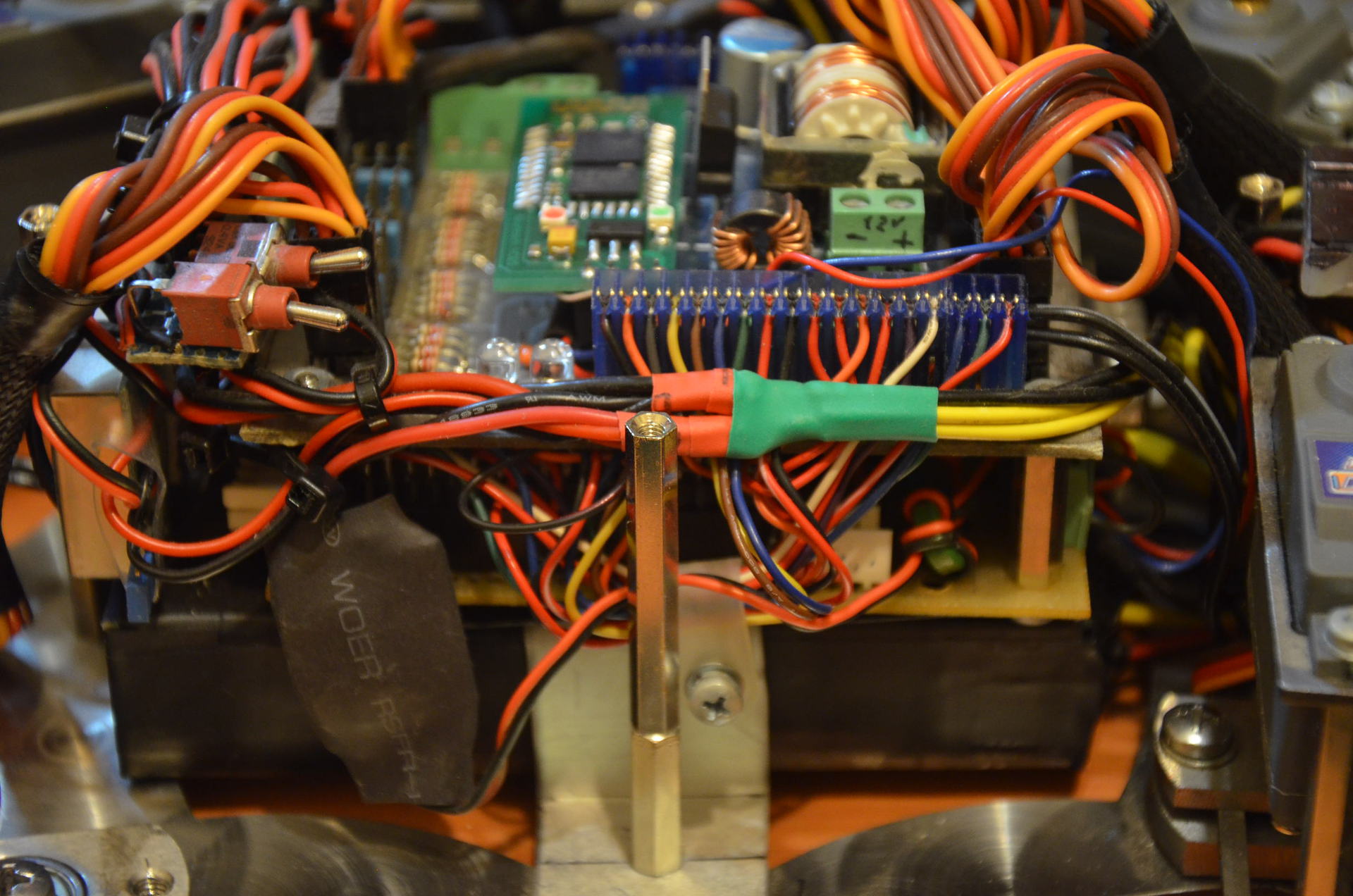
拡張ボードを作成してコントローラーボードに接続し、バッテリーの両面テープで固定しました。 電圧コンバーターが接続され、制御部がマニピュレーターフレームに事前にインストールされています。
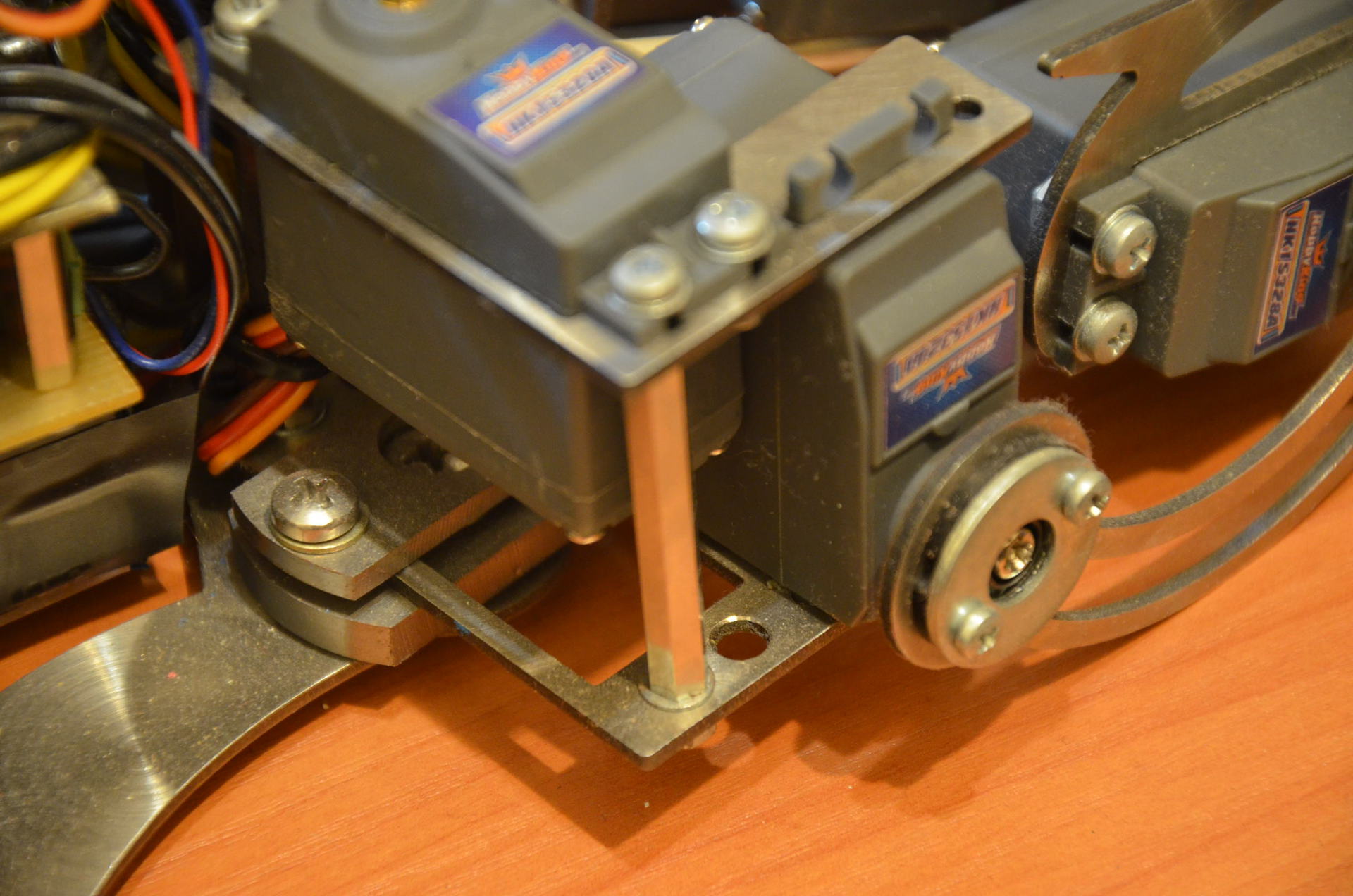
下肢の取り付けには、小さなベアリングを使用し、日本のステッピングモーターから取り外し(古い日本のプリンターを分解)、金属製のマウントに取り付けました。 最大限の信頼性のある接触のために、ロックタイト480接着剤が使用され、ベアリングとフレーム下部の間の小さな隙間に金属ワッシャーが使用されました。 M5取り付けネジ:

リムとマウントは、クランプの種類によって相互接続されます。 実装が簡単で、サーボシャフトとベアリングのアライメントを設定するときに少し変更することができました。
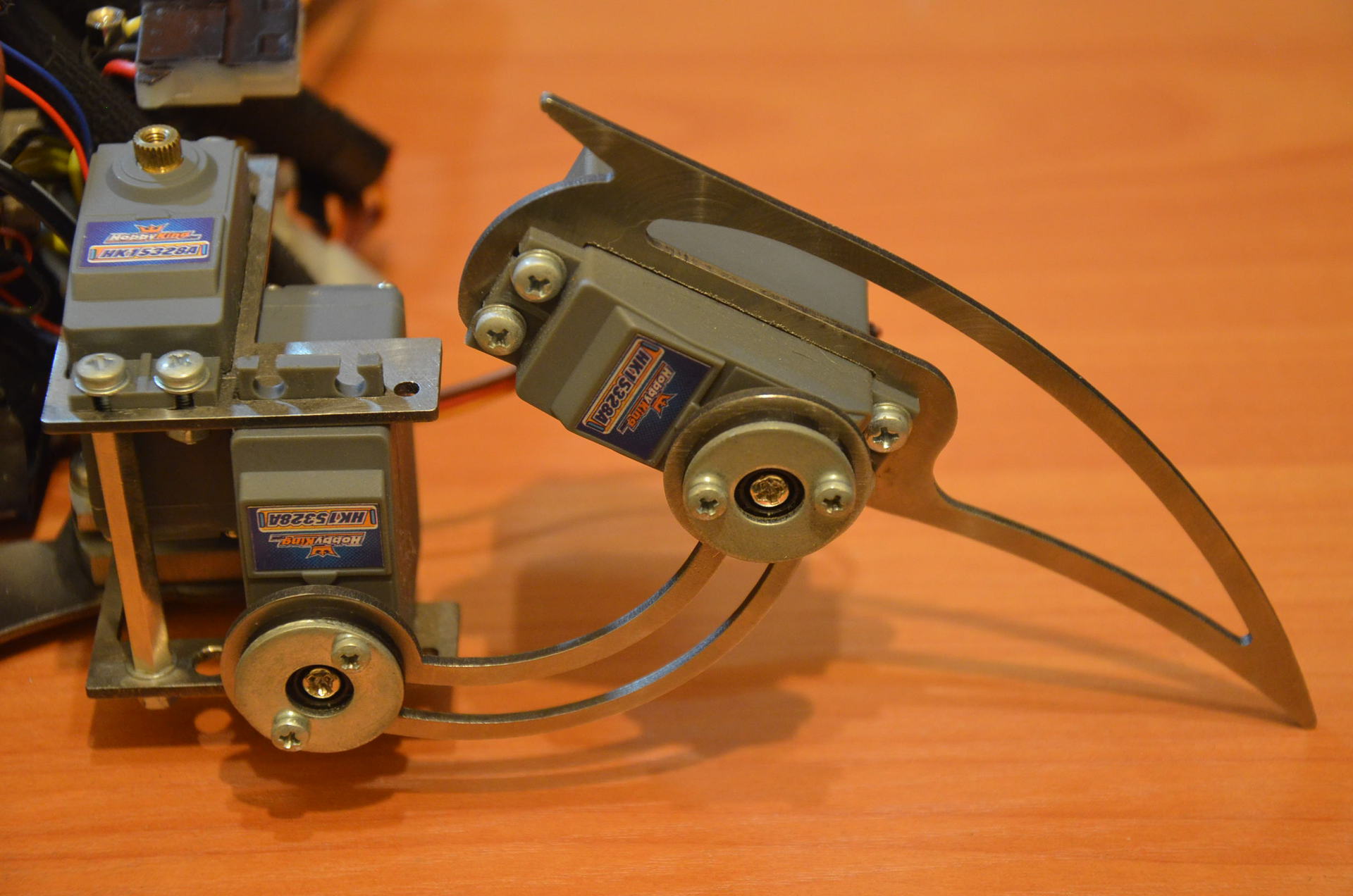
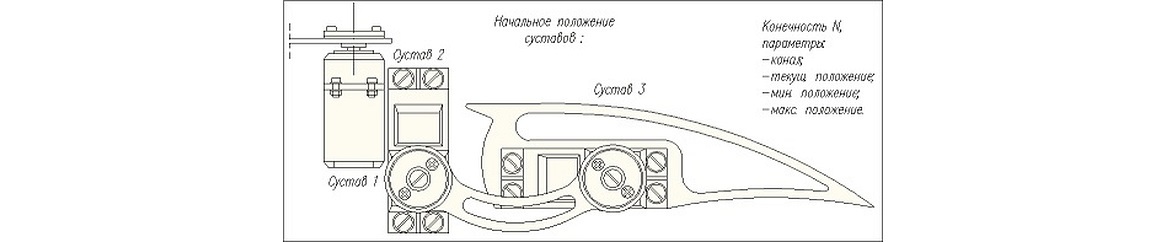
1つの肢の一般的な構成体は、次の形式を取得しました。
マニピュレータをPCに接続するには、HC-05 BluetoothモジュールとClass 1 Bluetoothアダプタを使用し、USB EasyCAP TVチューナーを介してPCに接続されたレシーバーを備えた最も単純な中国製ワイヤレスアナログカメラ2.4 GHzを使用しました。 画像解像度720x576。 マニピュレーターを制御するために、SpeedLink STRIKE FXワイヤレスコントローラーが購入されました。

コネクタを使用して供給導体をはんだ除去した後、すべてのワイヤを結束してタイで固定しました。 サーボからのワイヤはナイロンメッシュで覆われていました。 9V電圧コンバーターを使用してカメラに電力を供給しました。 誘導された干渉をほぼ完全に取り除くことを可能にする、即興の手段からのLCフィルターを使用します。
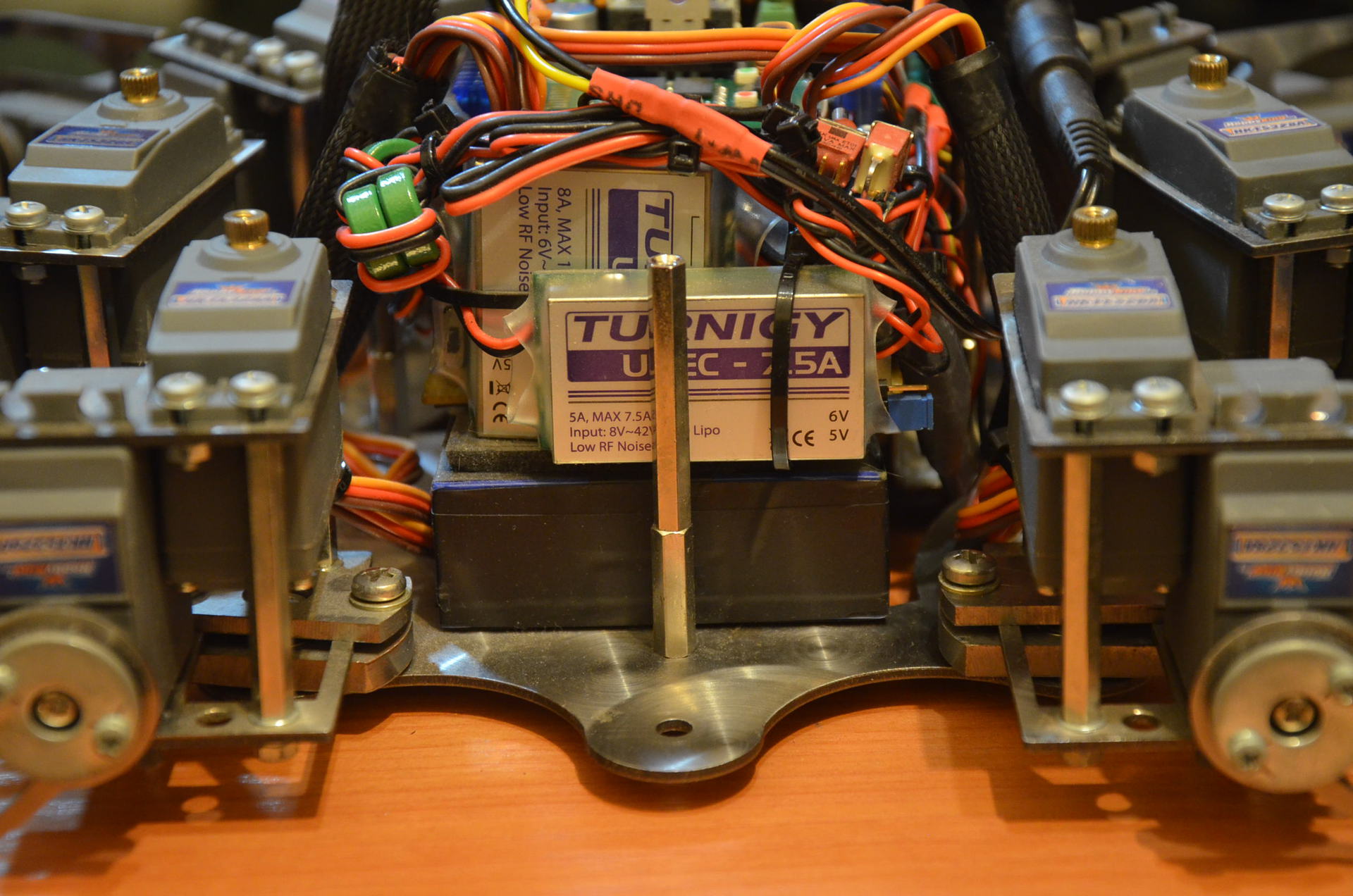
バッテリー(およびそれに接続されているすべての制御電子機器)をマニピュレーターの本体に固定するために、アルミニウム製のブラケットが配置されました。
以下は、マニピュレーターの正面の写真です。
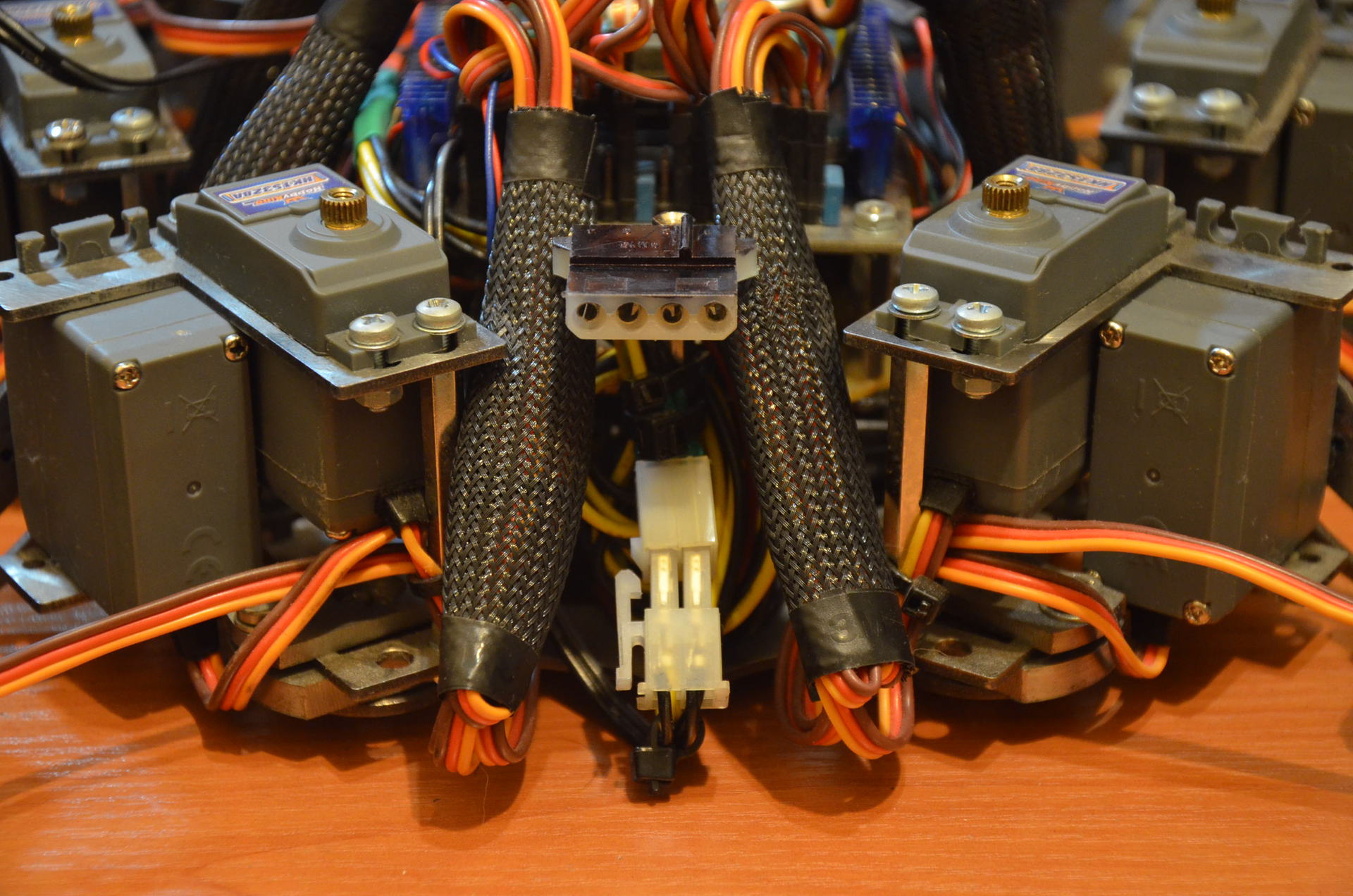
マニピュレーターの背面には、バッテリーをオンにして充電するためのコネクターがあります。
バッテリーは、外部iMAX B6コントローラーによって充電され、バランス充電モードに設定され、RXN-305D電源が供給されます。

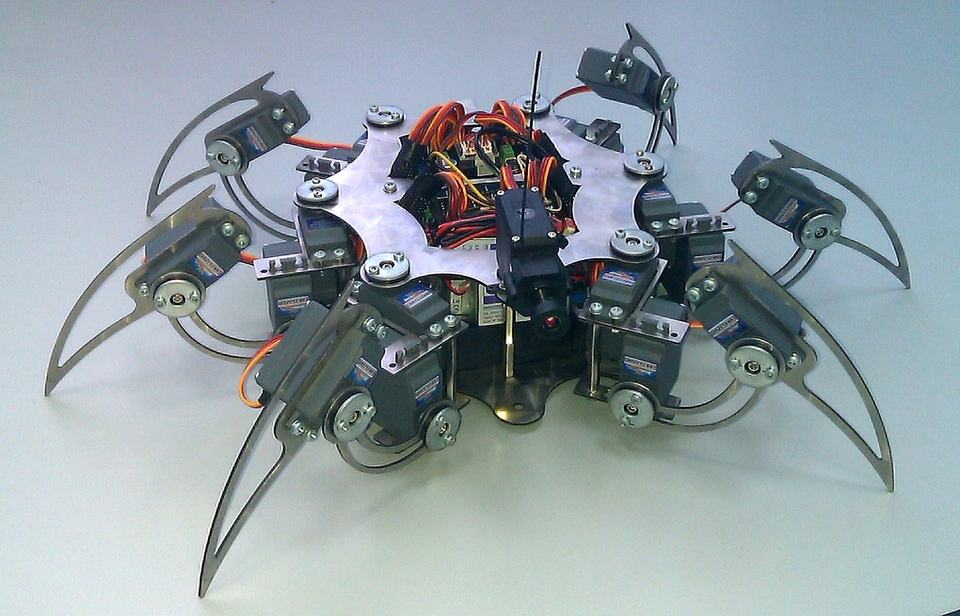
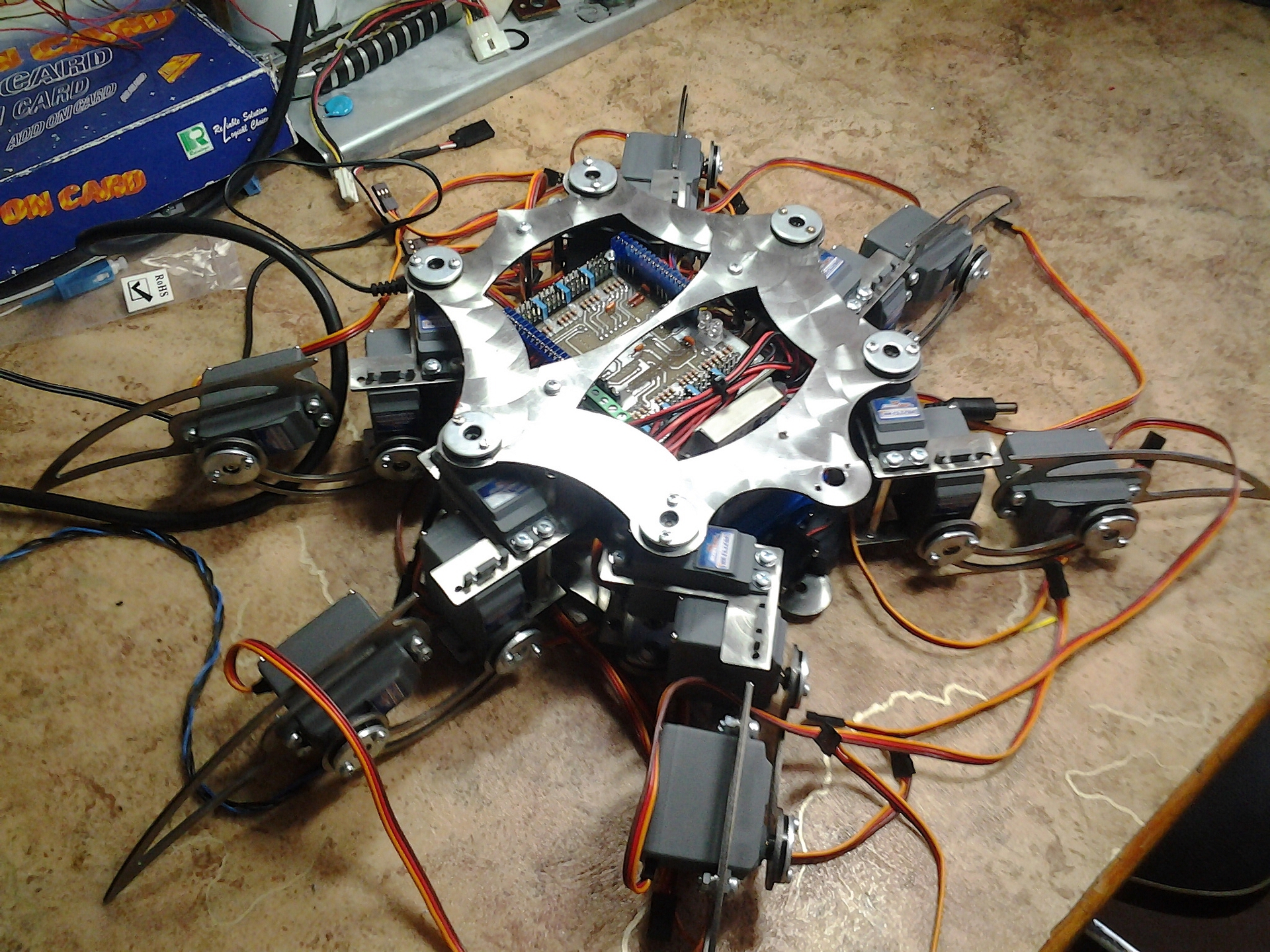
コントローラーをフラッシュし、必要なすべてのモジュールを取り付け、手足を調整した後、マニピュレーターは最終的なフォームを取得しました。これを以下に示します。

マニピュレーターの最終重量は約3kgでした。 回転のために、カメラはMG995サーボに取り付けられました。 1回のバッテリー充電からの動作時間は約40分です。 ビデオ信号は3〜4個の鉄筋コンクリート壁を自由に通過します。 オープンスペースでの通信範囲〜30メートル。
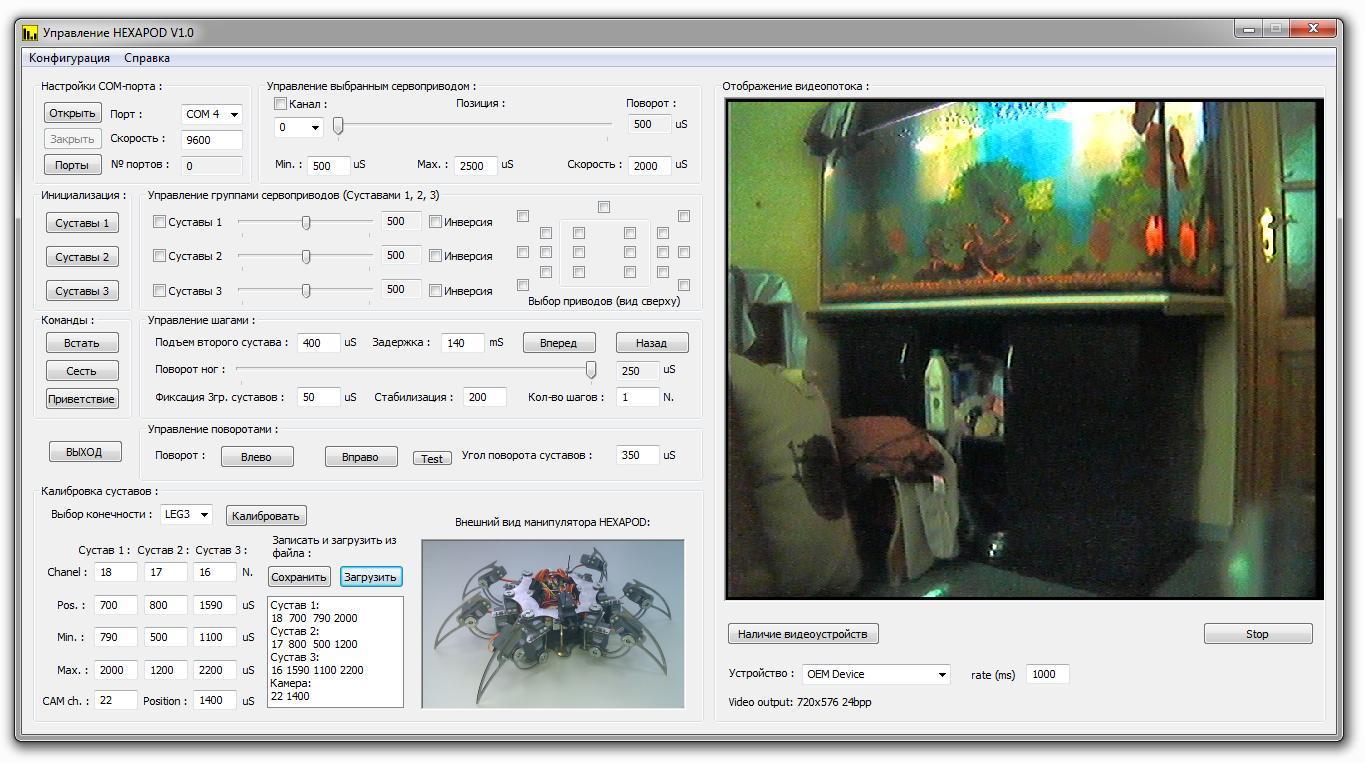
PC用のソフトウェアは、Microsoft Visual Studio 2008で開発され、ビデオデータの機能管理、キャリブレーション、および表示です。 このプログラムを使用すると、単一のサーボドライブとジョイントのグループの両方を制御できます。
アルゴリズムで使用されるすべてのパラメーターは、グラフィカルインターフェイスに表示されます。 各肢のキャリブレーションデータを保存/ロードすることができます。 TVチューナーからビデオデータを取得するために、DirectShowが使用されました(OpenCVを使用して画像を取得する試みは失敗しました)。 DXSDK_Jun10をインストールし、gdiplusグラフィックライブラリをプロジェクトに接続することも必要でした。 Bluetoothを介して実装された仮想COMポートは、SerialGate.dllライブラリのみを使用する中国のBluetoothアダプターで適切に機能しました(ほとんどの場合、問題はドライバーまたはアダプターにありますが、他のアダプター/ドライバーでは実験しませんでした)。 ゲームパッド(HIDデバイス)を操作するために、ライブラリhid.lib、hidpi.h、hidsdi.h、hidusage.hが接続されました。
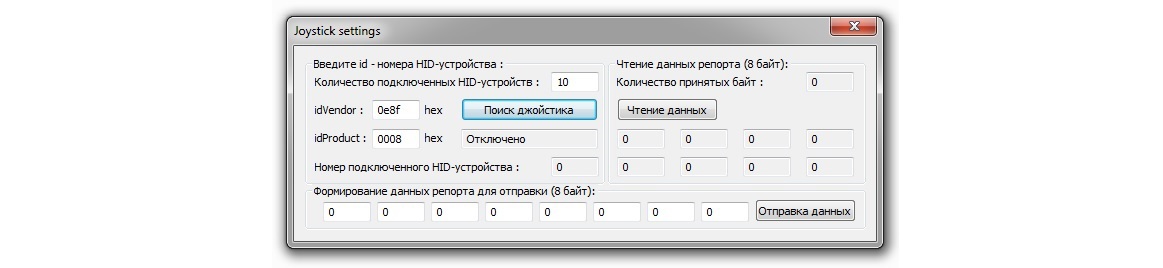
ゲームパッドキーで使用される値を決定するために、追加のソフトウェアモジュールが実装されました。
以下は、マニピュレーターの最初の動きと、アルゴリズムの最適化と遅延の削減によるさらなるキャリブレーションのビデオです。
設計および制御プログラムにわずかな変更を加えた後、デバイスの最終的な実装を次のビデオに示します。
キット全体の概算コストは約400ドルです。
結論として、マニピュレーターの開発の上記の段階を実施した後、いくつかの経験が得られ、対応する結論が引き出されたことを付け加えたいと思います。 動作の仕組みのように、レイアウト、電源電圧のフィルタリング、およびソフトウェア部分。 将来このような設計を作成する場合、ケースの設計、軽量材料、高速サーボ、より正確な移動アルゴリズム、ビデオデータ処理の自律モードが考慮されます。 しかし、これらはすべて、将来の自由時間の存在下で行われます。
ご清聴ありがとうございました。