人体の動きを追跡することは、1000年以上にわたってさまざまな成功を収めてきました。 私はかつて古代ギリシャ語話者のデモステネスの話を読んだことがあります。 これを取り除くために、彼は毎日の訓練中に彼の肩に剣を掛けました。 その結果、スピーカーは非常に有名になり、彼についてのウィキペディアの記事さえありました。
多くの人が中国の武術に関する映画で見た別の良い例です。 たとえば、カンフーパンダは、テクニックを実行しながら、ひじを大きく広げました。 この瞬間を追跡するために、彼はマグカップを脇の下に置きました。 ごぼうが落ちる-生徒はマスターからキャッチを受け取ります。 確かに私たちの親の何人かは、私たちが身をかがめると、スティックを後ろに固定すると約束しました。 確かに、これらの脅威は決して実行されなかったため、あまり説得力がなかった。
多くの場合、スポーツトレーニング中にモーショントラッキングが必要です。 たとえば、特許US3820783を見つけることができます。これは、アスリートを誘導し、アスリートが誤って動くのを防ぐトレーニング装置を説明しています。
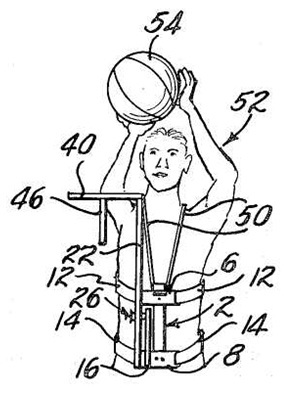
特許US 3820783のインストールスキーム
ビデオを使用した動き検出
70年代半ばに、いくつかのポイントから行われた動きのビデオを処理するシステムが登場しました。 その結果、1つまたは別の動きの数学モデルが登場しました。 映画「ロードオブザリング」の撮影方法に関するビデオを見ると、ゴラムの動きを撮影した興味深いエピソードを見ることができます。 実際、特別なスーツを着た男性は動いており、スマートな数学装置とソフトウェアの助けを借りて、彼はかなりハゲのキャラクターであることが判明しました。
動きのビデオ録画には明らかな利点がありますが、この記事では別の解決策を説明したいので、少し批判して不利な点を取り除くことができます。
- ビデオ撮影はいくつかの角度から行う必要があります。
- 多くの場合、マーカーを身体に配置します。
- 高価なハードウェア(ビデオカメラ)が必要です。
- ビデオを人間の動きのモデルに変換するには、優れた計算能力と適切なソフトウェア製品が必要です。
- 人は長距離を自由に移動できません。そうしないと、必然的にビデオゾーンを超えてしまいます。
- 測定対象に加えて、専門家のチームが必要です。つまり、一般ユーザーが朝のランニングで体の動きを記録できるとは考えられません。
運動測定は、スポーツだけでなく、非常に便利です。 自動車、コンベヤー、ミシンなどの開発において、工業デザインにも使用されています。 このようなシステムは、たとえばシーメンス-ジャック( ヒューマンシミュレーションおよび人間工学 )からすでに存在しています。 ドライバーが設計された車のエアコンの電源ボタンを押すことが便利かどうかを調べる方法は? もちろん、車を作り、人を入れてチェックすることができます。 しかし、バーチャルカーにバーチャルな人物を入れる方がはるかに簡単です。 すべての最新の描画システムが3Dモデルの開発を提供しているため、すでに仮想車があります。 人体モデルの動きを彼の実際のプロトタイプの動きに結び付けることだけが残っています。 これは、同じビデオモーション録画を使用するか、以下で説明する方法を使用して実行できます。
スマートな服
この記事では、セットの範囲に制限されることなく動きを測定できたらどんなにすばらしいかをお伝えしたいと思います。 たとえば、測定機能が衣服に組み込まれている場合。 歩き、走り、ジャンプし、服がすべてを記録してから、動きをスマートフォンの画面に再現し、推奨事項を提示し、膝を負傷させずに走る方法、座り、前かがみにならない方法、自転車を正しく怪我することなくペダルをかける方法を提案します。
科学技術はすでにそのような機会を提供していることがわかります。 もちろん、スマートカジュアルな服についてはまだ話していませんが、身体の動きを非常に良いレベルで記録するウェアラブルセンサーで構成される特別なスーツが既にあります。 そのようなスーツはXSENSによって作られています 。 安価ではありませんが、すべての家族に数十台のコンピューター機器が登場するにつれて、マイクロチップはより安価になり、インテリジェントポータブルシステムはますます増えています。 私たちは明るい未来に向けて大きく前進しています。 技術的な詳細を詳しく説明することなく、モーションレコーディングがどのように行われるかを説明しますが、電子機械センサーに基づくモーション測定システムの主要コンポーネントの動作と動作原理について説明します。
MEMS
マイクロエレクトロニクスの発展に伴い、さまざまな小型センサーが登場します。 このようなセンサーの別のグループは、MEMS-マイクロ電気機械センサーと呼ばれます。 動きを測定するために、加速度センサー-加速度計と角速度センサー-ジャイロスコープが使用されます。 加速度計は、加速度の作用下でその特性を変化させる小型の敏感な要素です。 それは、圧電センサーまたは可変容量の要素-可動ライニングを備えたコンデンサにすることができます。 圧電センサーは、電極に小さな電圧を生成します。この電圧を測定し、加速度に変換できます。 状況は、可変コンデンサの静電容量と似ています。
ほとんどの場合、MEMSジャイロスコープはコリオリの力の作用を使用します。コリオリの力は振動板をたわませます。設計では、偏差の大きさが記録され、角速度に変換されます。
物理学と数学の過程からわかるように、ベクトルはベクトルのコンポーネントに分解できます。 そのため、たとえば、加速度と速度は相互に垂直なコンポーネント、X、Y、Zに分解されます。MEMS敏感な要素は、これらのベクトルのそれぞれに沿って加速度と速度を別々に測定します。
一度に複数のMEMSセンサーを含むマイクロ回路が存在することに注意することが重要です。
たとえば、MEMS加速度計チップは、3つの軸x、y、zに沿った加速度を一度に測定します。 同じことが、3つの軸すべてに沿って角速度を一度に測定できるジャイロスコープのマイクロ回路にも当てはまります。 加速度と速度の両方を同時に測定する超小型回路もあります。 このようなセンサーは、6座標と呼ばれます。
MEMS-コントローラー
通常、MEMSセンサーには、加速度または角速度を計算し、デジタルフィルタリングとチップの構成を提供するコントローラーが組み込まれています。
コントローラ内のデータは、レジスタと呼ばれる特別なメモリセルに保存されます。 それらは、符号付きの整数形式で表示されます。 計測単位は、原則として、加速度計ではg [重力加速度-9.8 m / s2]、ジャイロスコープではrad / s [ラジアン/秒]です。 データ形式、レジスタアドレス、測定単位、測定範囲、およびその他のパラメータの説明は、対応するチップのドキュメントに常に記載されています。
また、このコントローラーは、一般的なインターフェイスの1つを介して外部とのMEMSセンサー通信を提供します。 これは通常、SPIまたはI2Cです。 SPIは、2つのデータラインと1つのクロックラインを持つインターフェイスです。 I2Cは、1つのデータラインと1つのクロックラインを持つインターフェイスです。 原則として、MEMSセンサーからのデータ送信が簡単で快適であることを知る必要があるだけです。これには、標準化された共通インターフェースと既製のライブラリがあります。
コンピューター、タブレット、またはスマートフォンには、ユーザーが使用できるSPIまたはI2Cインターフェイスがないため、センサーを接続するには、他の一致するデバイスが必要です。 これは、たとえば、Bluetooth無線送信機に接続されたマイクロコントローラーです。 原則として、バッファマイクロコントローラは、通信チャネルの負荷を軽減するためにデータを前処理する責任があります。
一般的に、通信チャネルの選択は別の大きなタスクです。 もちろん、このチャネルはできればワイヤレスである必要がありますが、どのワイヤレステクノロジーを選択する必要がありますか? BluetoothやWiFiなどの2.4 GHz通信規格は、ほとんどのユーザーデバイスでサポートされているため優れています。 しかし、一方で、それらは短波長のために通信範囲を制限します。 もちろん、約1キロメートルの範囲が宣言されたBluetooth無線モジュールがありますが、物理学の法則をキャンセルした人はいないので、私たちは平気ではありません。そのような範囲は、直接視界と地上のセンサーの十分な高さの条件下でのみ取得できます。 測定およびデータ処理のモデルを決定することが重要です。 すべての計算が人のポケットにあるスマートフォンで行われる場合と、コンピューターがトレーナー/オペレーターのテーブルから数十メートル離れている場合です。 マーケティングと、複雑なモーション測定のターゲットオーディエンスの選択の問題です。 いずれにせよ、意図された目的のためにデータを送信するタスクは解決でき、これには専用のハードウェアおよびソフトウェアソリューションがあることに注意してください。
人体モデル
それにもかかわらず、データが意図した目的に達すると、データの処理が開始されます。 動きの計算と視覚化には、人体の数学モデルが必要です。 このようなモデルでは、腕、脚、腰、胸の長さの違い、つまり人のさまざまな人体測定特性を考慮に入れる必要があります。 おそらく、そのようなモデルでは、身体の内部構造も考慮に入れる必要があります。 モデルが複雑になるほど、作成が難しくなり、費用がかかり、作成に時間がかかります。 個人的には、モデルには敏感な要素に配置できる要素のみを含めるべきだと考えています。 つまり、手について話している場合は、次の部分からモデルを作成することをお勧めします。
- 肩
- 前腕
- ブラシ;
- 指
すべての骨、筋肉、腱が不適切なモデルの構築。 円錐は、体の一部の最も単純なモデルとして機能できます。 これは、任意のグラフィカル環境で簡単に実装でき、多くのリソースを必要としない単純な幾何学的図形です。これは特にモバイルプラットフォームに当てはまります。 実際には、円錐の体積形状はモデルを視覚化するために使用され、対称の縦軸と一致するベクトルはさまざまな計算に使用されます。 コーンの下部と上部の円の長さが異なると、直径の違い、たとえば、膝の上下のヒップの違いを簡単にシミュレートできます。
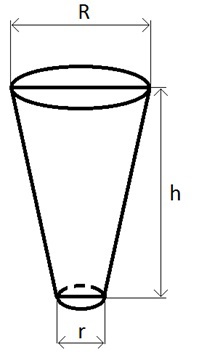
人体モデルの要素としての円錐
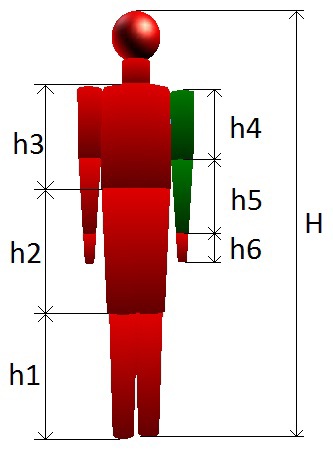
コーンで構成された人体の完全なモデル
モデルがかなり認識可能に見えることに同意します。 このモデルはMicrosoft XNA環境で構築されており、インターネット上で見つかったPrimitives3Dライブラリを使用して円錐を描きました。 モデル要素の配置には、XNA環境の行列計算の数学的装置が使用されます。
コンピューティングについて少し
モデルが配置されている空間は、ワールド空間と呼ばれます。 ワールド空間でモデル要素を移動するには、変位行列を構成する必要があります;回転するには、必要な回転行列を使用します。 一般的に言えば、これらは同じマトリックスであり、異なるセルを使用する異なる目的にのみ使用されます。
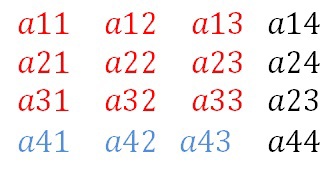
XNAのマトリックス構造
赤で強調表示された要素は回転を担当し、青で強調表示された要素は移動を担当し、黒の要素は4x4寸法に準拠するために必要です。 変位行列を作成するには、次の方法を使用します。
Matrix.CreateTranslation(vector3)
これは、パラメータとして、ポイントの目的の位置の半径ベクトルを取ります。 ボディのすべての要素を配置するには、各要素の変位行列を構成する必要があります。そのような行列をfBaseWorldiと呼びましょう。
3Dモデルの動きに関するものはすべて、コンピューターゲーム開発者やコンピューター3Dグラフィックスの分野で働く他の専門家によく知られています。
最も興味深い部分、つまり角速度と加速度の測定値を画面上のモデルの位置に関連付ける方法に進みます。 空間内の物体の位置は、オイラー角、変位行列、回転行列、または四元数を使用して指定できます。 どちらの方法を選択するかについての論争で多くのコピーが壊れています。 四元数の位置表現を使用します。 よく知られている数学的変換を使用して、あるメソッドから別のメソッドに簡単に移動できます。
クォータニオンは、ボディを回転させる軸と回転角度を空間で定義する4つの数値のセットです。 四元数は
q = [W、X、Y、Z]、
ここで、Wは回転の半角の余弦です。 X、Y、Z-回転軸の座標。
マトリックスには16個の数値が含まれ、クォータニオンはデータ転送時間を節約し、通信チャネルにそれほど負荷をかけないため、クォータニオンは回転マトリックスよりも望ましいです。
注意深い読者は、四元数が回転運動のみを記述することができることに正しく反対することができますが、並進運動はどうですか? 実際、提案された方法は、周囲の領域を参照せずに動きを登録するように設計されています。 そして、回転だけですべての人間の動きを構築できます。
実際、私たちの体は実際には純粋な(回転なしの)伸張と圧縮を受けません。 たとえば、ブラシを前後に上下に直線的に移動するには、肘関節の前腕または肩の肩を回転させる必要があります。
残っているのは、加速度と角速度を四元数に変換することだけです。 このような変換を生成する数学的装置は、運動測定システムを製造する企業の神聖なものです。 このデバイスは一般的に知られていますが、インターネット上ではソースコード( オープンソースIMUおよびAHRSアルゴリズム )を見つけることもできますが、通常の問題はすべて詳細にあります。 したがって、モーション測定に位置誤差が含まれていても驚かないでください。 これは、センサーの読み取り値のエラーが原因であり、統合されており、結果に大きく影響します。 また、人体のセンサーの位置のエラーは、不正確な部分の原因となります。 優れたソリューションは、MEMSチップのメーカーであるInvensenseによって提供されます。彼らは、計算を実行する提供されたライブラリをロードできるマイクロ回路を生成します。 以前のバージョンでは、ライブラリはCで記述されたコードであり、サードパーティのマイクロコントローラーで実行されていました。 ライブラリは、電力が供給された後、MEMSチップにロードする必要がある16進数の配列です。 同様のソリューションは、 Microchipなどの他の企業によって提供されています。
体の部分の位置を計算して四元数の形で表現した後、体の個々の部分に関連する表示から一般的なモデルを作成する必要があります。 これは、XNA環境とPrimitives3Dコードが役立つ場所です。 移動または回転に使用されるPrimitives3Dライブラリは、マトリックス表現のデータを使用します。 したがって、センサーから受け取ったクォータニオンを変換するには、XNAの組み込み関数を使用する必要があります。
Matrix.CreateFromQuaternion(qi)
ここで、qiはセンサーからのクォータニオンです。
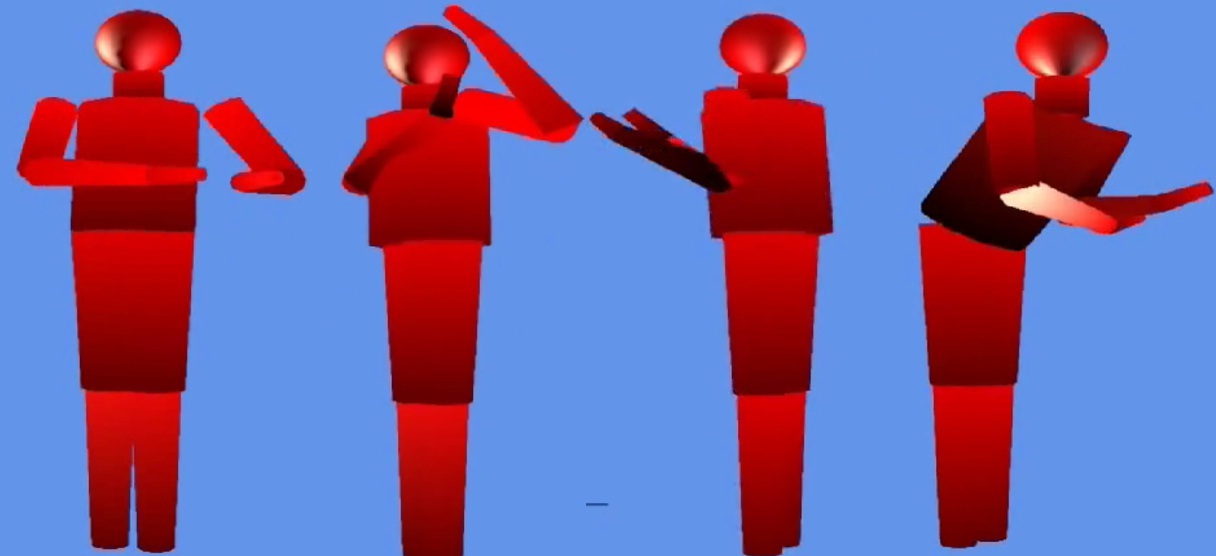
次に、回転した身体の部分を原点から対応するポイントに移動する必要があります。たとえば、前腕は肘に「取り付け」られます。 既に写真では完全に「組み立てられた」ボディを確認していますが、新しい四元数が到着するたびに常に正しい位置にあるため、ボディの位置を再計算する必要があります。 これは、クォータニオンを計算するためのライブラリがクォータニオンを生成し、ゼロタイムでの身体の位置を現在の瞬間と結び付けるという事実によるものです。 体の一部の転送を実行するには、2つの行列を乗算するだけです。
Matrix.CreateFromQuaternion(qi)* fBaseWorldi
fBaseWorldiマトリックスは常に調整されています。これは、肩が移動すると、それに応じて肘も移動するためです。 したがって、プログラムでは、体の任意の部分のクォータニオンの到着後、それに関連付けられている体の他のすべての部分の行列fBaseWorldiを計算する必要があります。 <
このビデオは、7つのセンサーを使用して得られた人間の動きを示しています。各腕に3つのセンサー、腰の胴に1つのセンサーがあります。
体の動きの記録を受け取ったので、これらのデータに基づいてさまざまな興味深い量の計算を行うことができます。 たとえば、スマートフォンでアプリケーションを起動し、子供の背中にいくつかのセンサーを配置する場合と同様に、デモステネスを支援し、正しい位置を監視し、この位置から逸脱すると信号を発するセンサーを肩に取り付けるために、これは彼が制御するのに役立ちますあなたの姿勢。 また、MEMSセンサーのさまざまな便利なアプリケーション。
おわりに
この記事では、人体の動きの測定に関して、MEMSセンサーの使用に関連する主要なポイントを確認しようとしました。 もちろん、ここで言及した問題の多くは、より詳細な説明を必要とし、さらに、詳細で記事が乱雑にならないように、いくつかのニュアンスには特に言及しませんでした。