私はこのプログラムを教育プロセスに導入し、その結果に喜んでいます;特にシンプルなプログラムを書くときや、複雑なプログラムの初期段階を作成するとき、子供たちの間で特に人気があります。 ArduBlokはグラフィカルプログラミング環境です。つまり、すべてのアクションはロシア語で署名されたアクションを含むペイントされた画像で実行されます。これにより、Arduinoプラットフォームの研究が大幅に簡素化されます。 すでに2年生の子どもたちは、このプログラムのおかげでArduinoでの作業を簡単に学ぶことができます。
はい、誰かがScratchがまだ存在し、Arduinoをプログラミングするための非常にシンプルなグラフィカル環境であると言うことができます。 ただし、ScratchはArduinoをフラッシュせず、USBケーブルを介してのみ制御します。 Arduinoはコンピューターに依存しており、自律的に動作することはできません。 独自のプロジェクトを作成するとき、特にロボットデバイスを作成するときは、Arduinoの自律性が重要です。
NXTやEV3などの有名なLEGOロボットでさえ、ArduinoプログラミングでArduBlokプログラムが登場した生徒にとってはそれほど興味深いものではありません。 Arduinoでさえ、どのLEGOコンストラクターよりもはるかに安価であり、多くのコンポーネントは古い家電から簡単に取り出すことができます。 ArduBlokプログラムは、初心者だけでなく、Arduinoプラットフォームのアクティブユーザーにも役立ちます。
それでは、ArduBlokとは正確には何ですか? 私が言ったように、これはグラフィカルなプログラミング環境です。 ほぼ完全にロシア語に翻訳されました。 しかし、ArduBlokのハイライトはそれだけでなく、私たちが書いたArduBlokプログラムがArduino IDEコードに変換されることでもあります。 このプログラムはArduino IDEプログラミング環境に組み込まれています。つまり、プラグインです。
以下は、点滅するLEDとArduino IDEで変換されたプログラムの例です。 プログラムでのすべての作業は非常に簡単であり、すべての学生がそれを理解することができます。
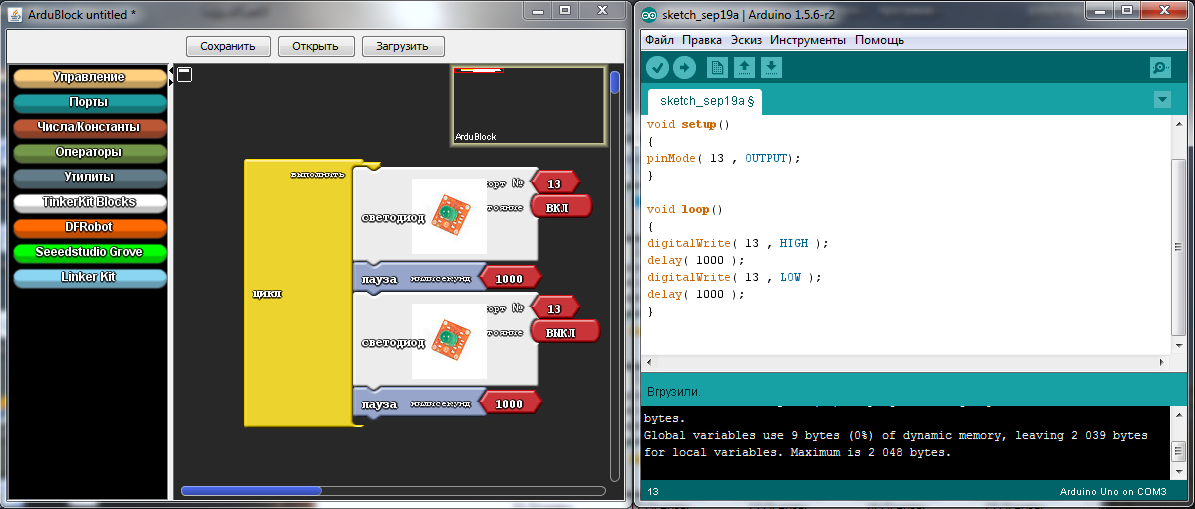
プログラムでの作業の結果、Arduinoをプログラムするだけでなく、Arduino IDEテキスト形式で理解できないコマンドを学習することもできますが、標準コマンドを書くのが面倒な場合は、ArduBlokの簡単なプログラムでマウスをすばやく操作し、Arduino IDEでデバッグする必要があります。
ArduBlokをインストールするには、まずArduino公式WebサイトからArduino IDEをダウンロードしてインストールし、Arduino UNOボードで作業するときに設定を処理する必要があります。 これを行う方法は、同じサイトまたはAmperkaで説明されているか、YouTubeで見ることができます。 さて、これをすべて理解したら、公式サイトからArduBlokをダウンロードする必要があります。ここにリンクがあります。 最新バージョンをダウンロードすることはお勧めしません。初心者にとっては非常に複雑ですが、2013-07-12のバージョンが最も人気があり、このファイルが最も人気があります。
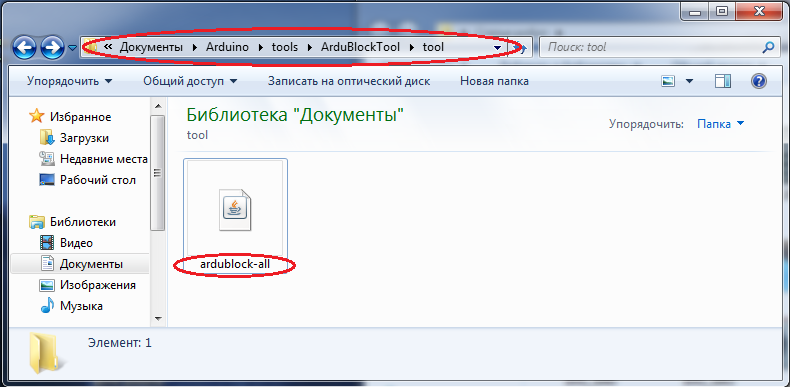
次に、ダウンロードしたファイルの名前を「ardublock-all」および「documents」フォルダーに変更します。 次のフォルダーを作成します:Arduino> tools> ArduBlockTool> toolそして最後に、ダウンロードして名前を変更したファイルをスローします。 ArduBlokは、Linuxを含むすべてのオペレーティングシステムで動作し、XP、Win7、Win8、Win7のすべての例で個人的にテストしました。 プログラムのインストールは、すべてのシステムで同じです。
簡単な場合は、メールディスク7zにアーカイブを準備し、展開すると2つのフォルダーが見つかります。 1つは、Arduino IDEがすでに動作しており、別のフォルダーでは、コンテンツをドキュメントフォルダーに送信する必要があります。
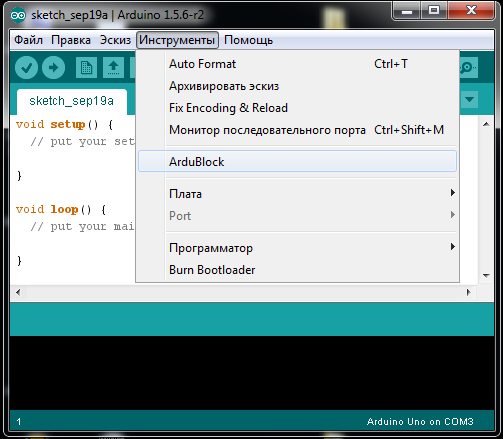
ArduBlokで作業するには、Arduino IDEを実行する必要があります。 次に、[ツール]タブに移動し、そこでArduBlokアイテムを見つけてクリックします。ここが目標です。
次に、プログラムのインターフェースを扱いましょう。 既に理解しているように、設定はありませんが、プログラミング用のアイコンがたくさんあり、それぞれにArduino IDEテキスト形式のコマンドがあります。 新しいバージョンにはさらに多くのアイコンがあるため、ArduBlokの最新バージョンに対処することは難しく、アイコンの一部はロシア語に翻訳されていません。

「管理」セクションには、さまざまなサイクルがあります。
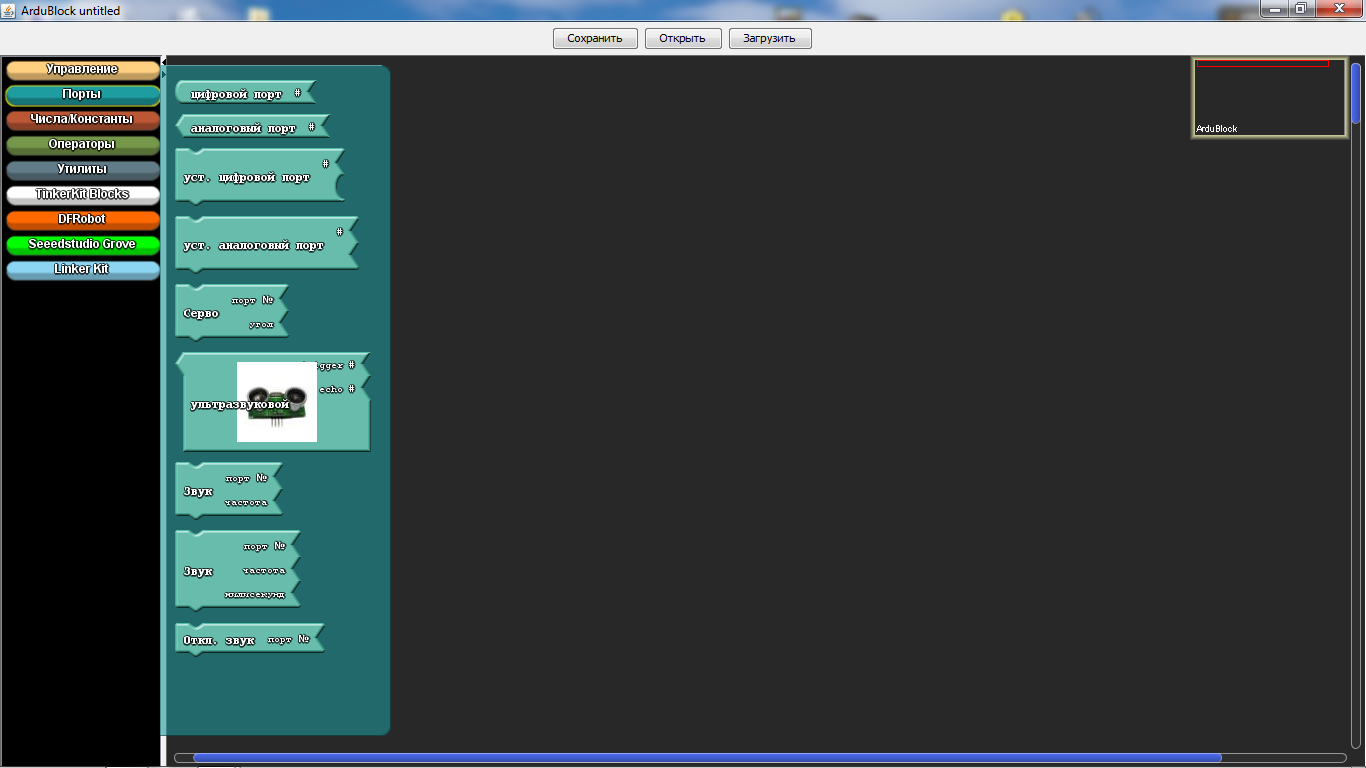
「ポート」セクションでは、ポートの値と、ポートに接続されたサウンドエミッター、サーボマシン、または超音波近接センサーを管理できます。
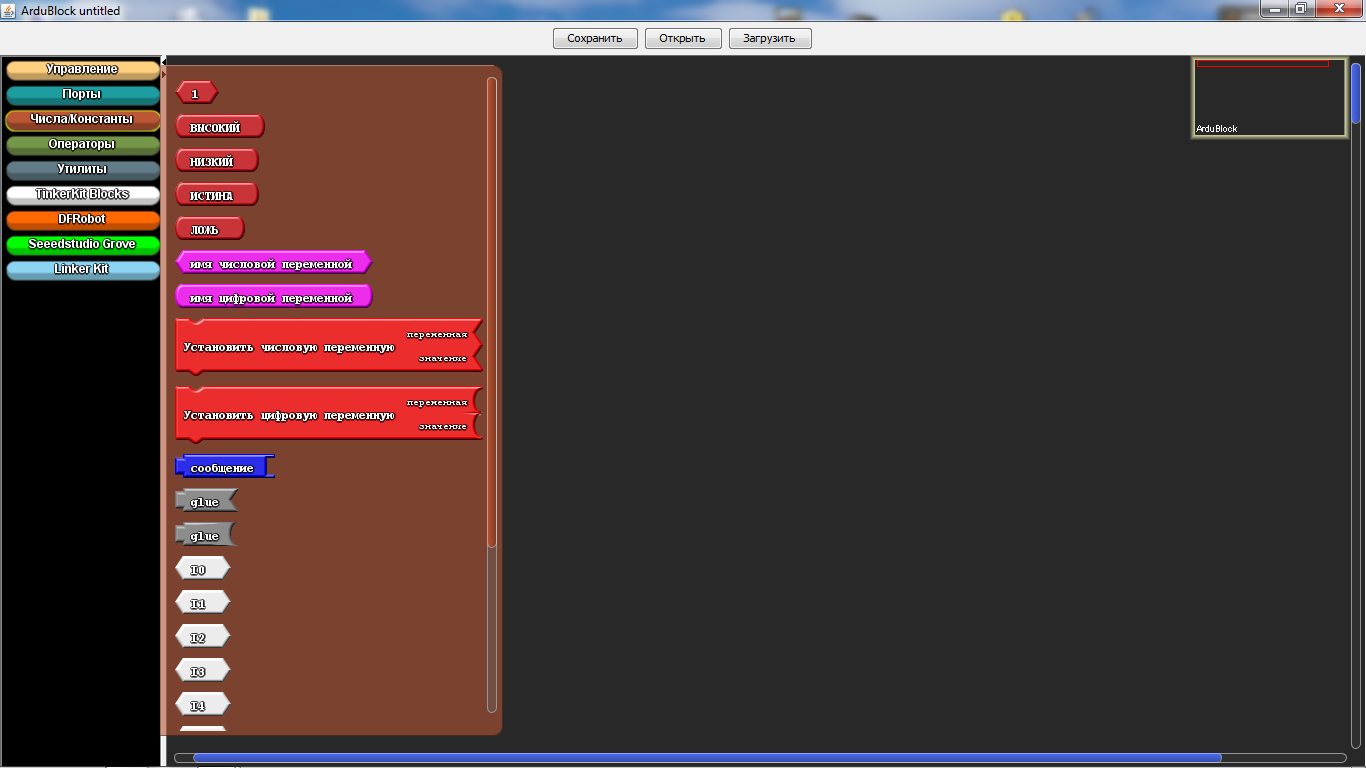
「数値/定数」セクションでは、デジタル値を選択するか、変数を作成できますが、以下は使用される可能性が低いという事実です。
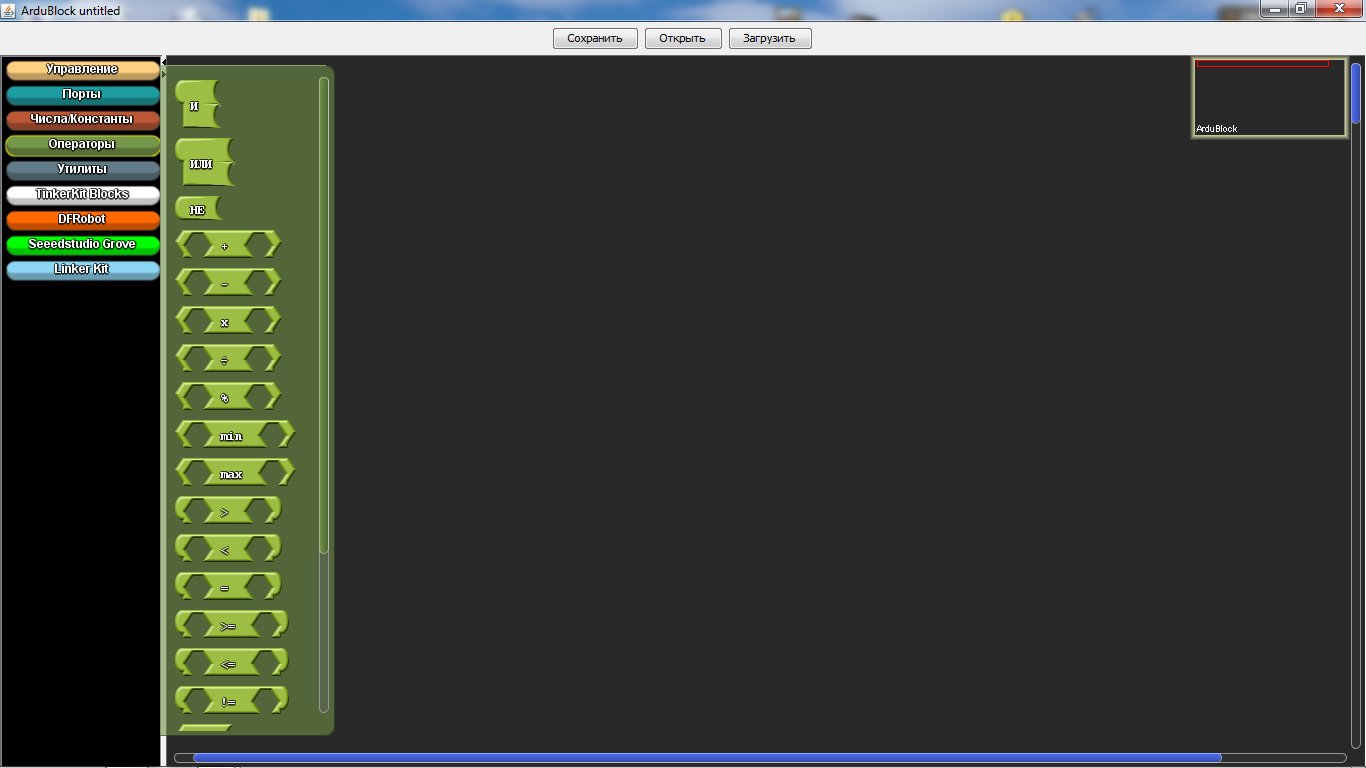
「演算子」セクションには、必要なすべての比較演算子と計算演算子があります。
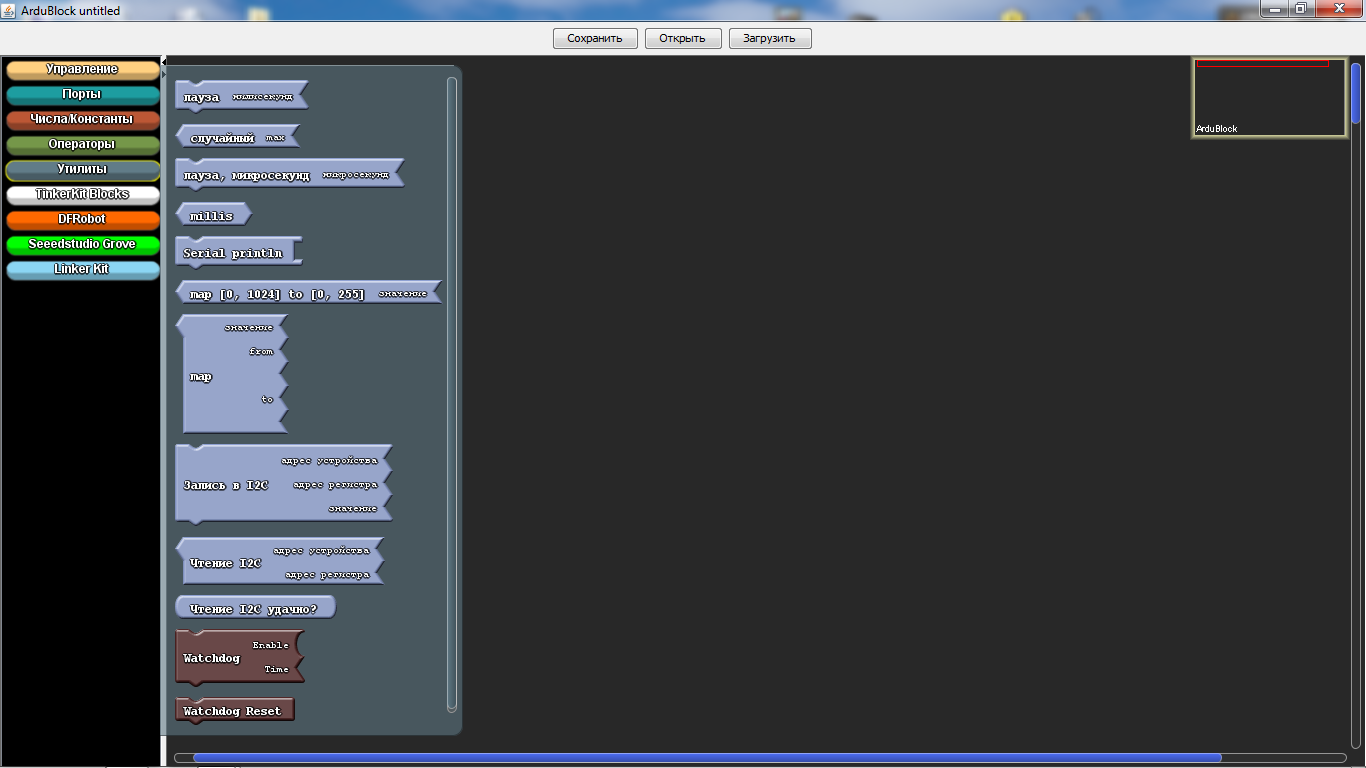
ユーティリティセクションでは、主に時間の経過とともにアイコンを使用します。

「TinkerKit Bloks」は、購入したTinkerKitキットセンサーのセクションです。 もちろん、このようなキットはありませんが、これはアイコンが他のセットで機能しないことを意味するものではありません。逆に、LEDやボタンをオンにするなどのアイコンを使用するのは非常に便利です。 これらの標識は、ほとんどすべてのプログラムで使用されています。 しかし、それらには特異性があります-それらが選択されると、間違ったアイコンがポートを示します。したがって、それらを削除し、リストの上部にある「数値/定数」セクションからアイコンを置き換える必要があります。

「DFロボット」-このセクションは、そこに示されているセンサーの存在下で使用されます。 現在の例も例外ではなく、「調整可能なIRスイッチ」と「ラインセンサー」があります。 「ラインセンサー」は、Amperka製であるため、写真のものとは異なります。 それらの動作は同じですが、Amperkaのセンサーは感度調整器を備えているため、はるかに優れています。
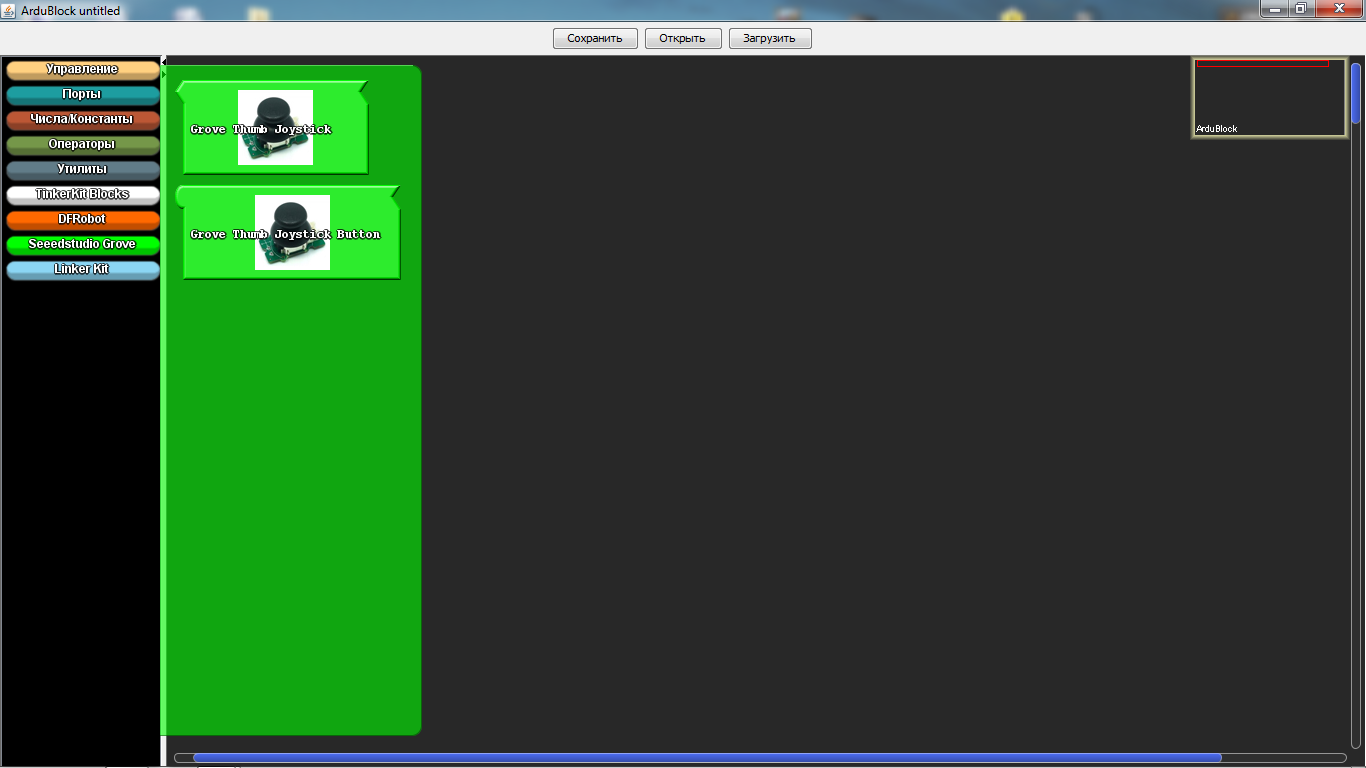
Seeedstudio Grove-ジョイスティックしかありませんが、このセクションでセンサーを使用したことはありません。 新しいバージョンでは、このセクションは拡張されています。

最後のセクションはリンカーキットです。 それに提示されたセンサーは、私は出くわしませんでした。
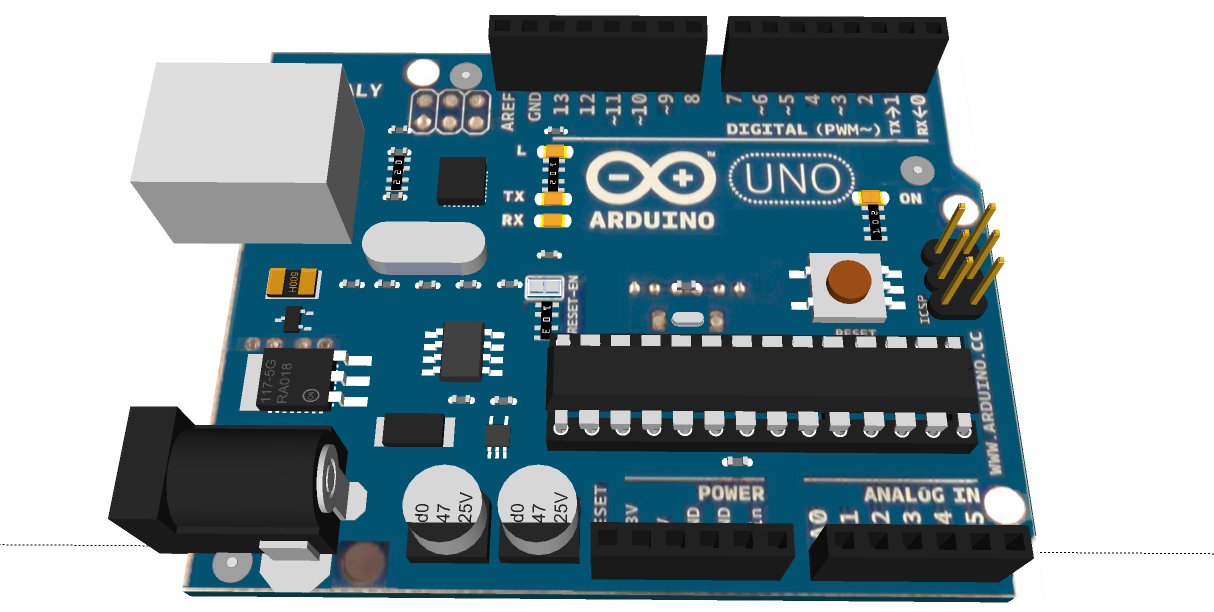
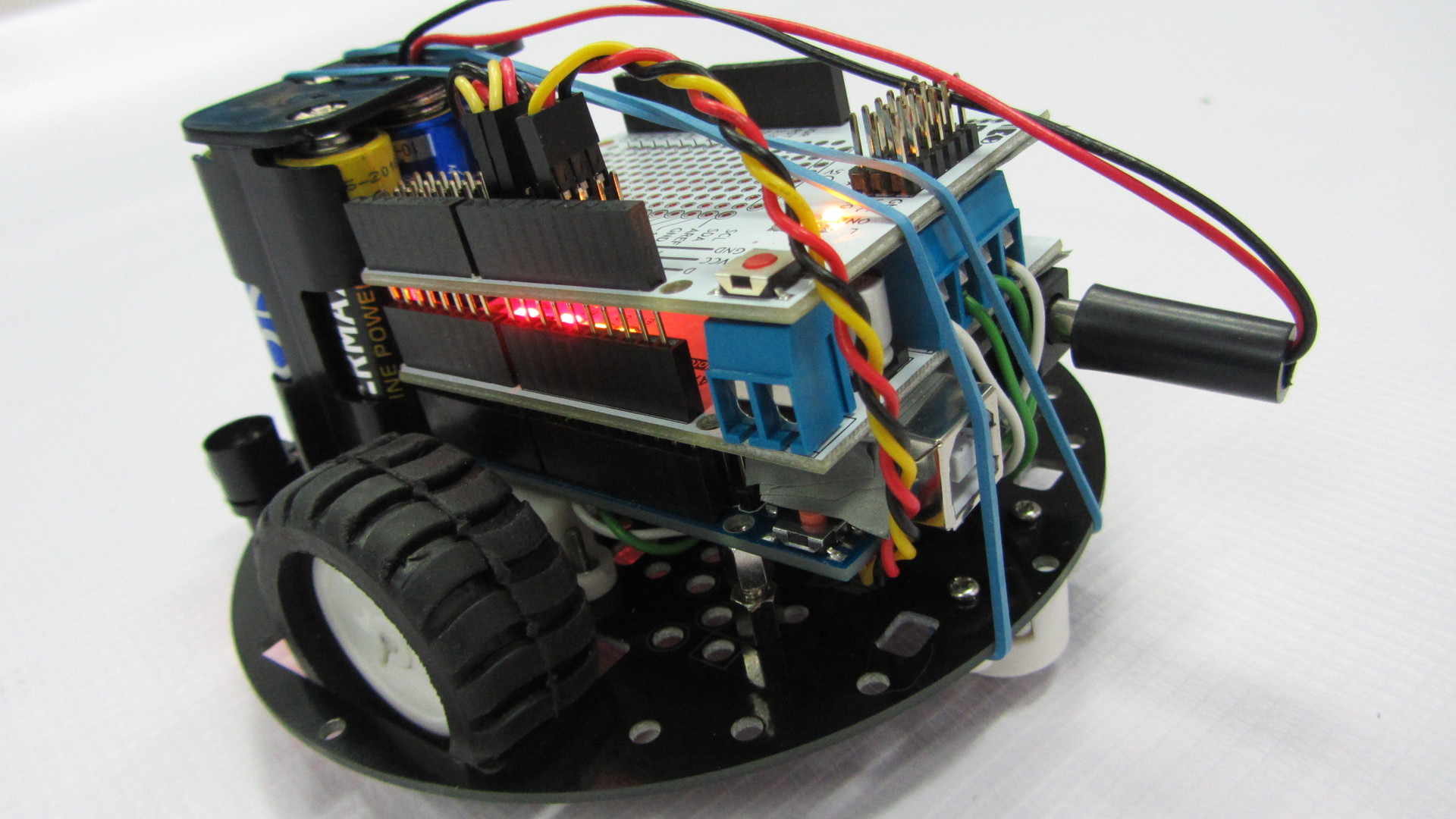
ストリップで動くロボットのプログラムの例を示したいと思います。 ロボットは、アセンブリと取得の両方で非常にシンプルですが、最初に行うことです。 その取得とアセンブリから始めましょう。
パーツのセット自体は次のとおりです;すべてはAmperka Webサイトで購入しました。
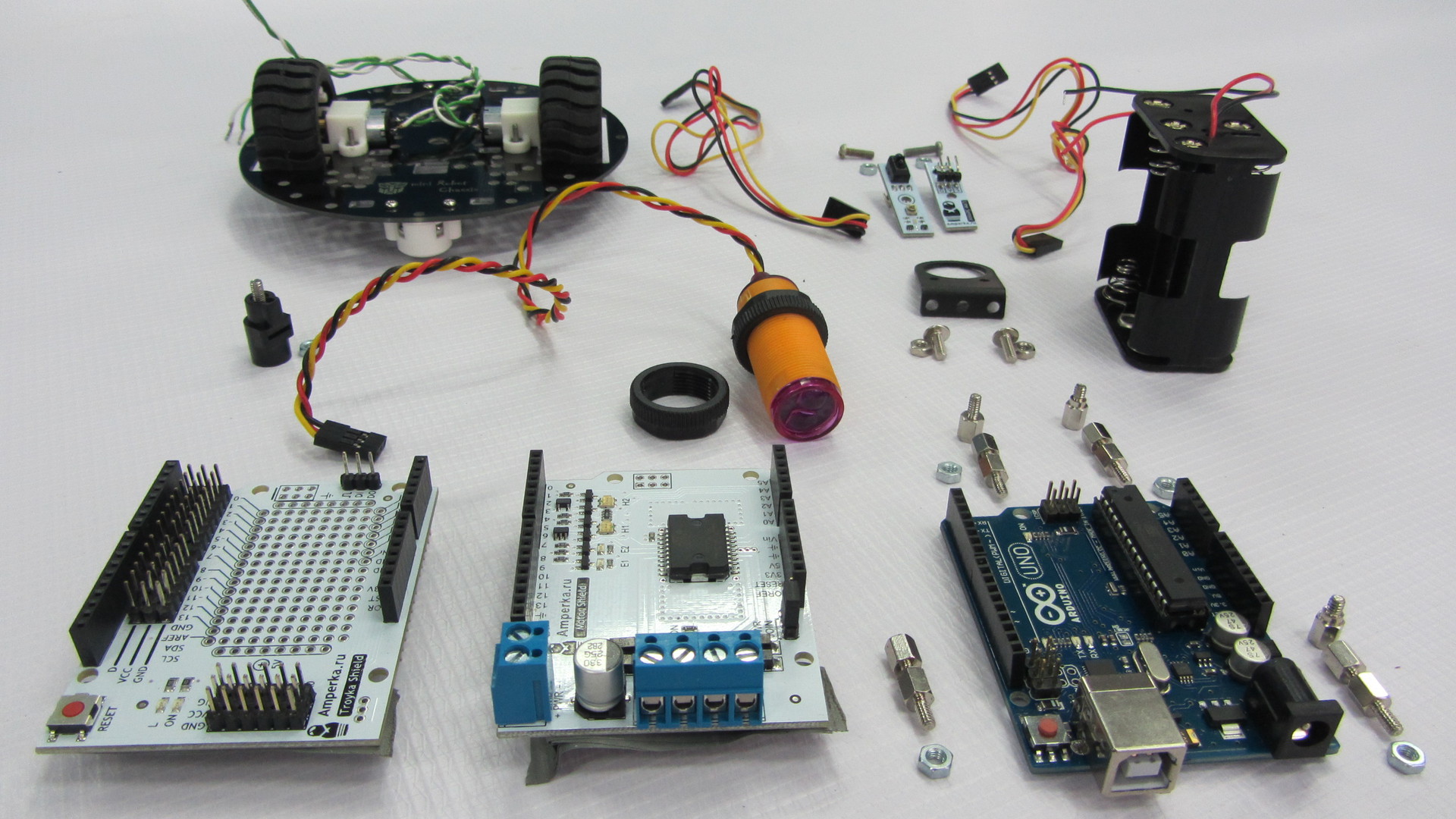
- AMP-B001モーターシールド(2チャンネル、2 A)1890摩擦
- AMP-B017 Troyka Shield 1 690こする
- AMP-X053バッテリーコンパートメント3×2 AA 1 60摩擦
- AMP-B018デジタルラインセンサー2 580摩擦
- ROB0049二輪プラットフォームminiQ 1 1890摩擦
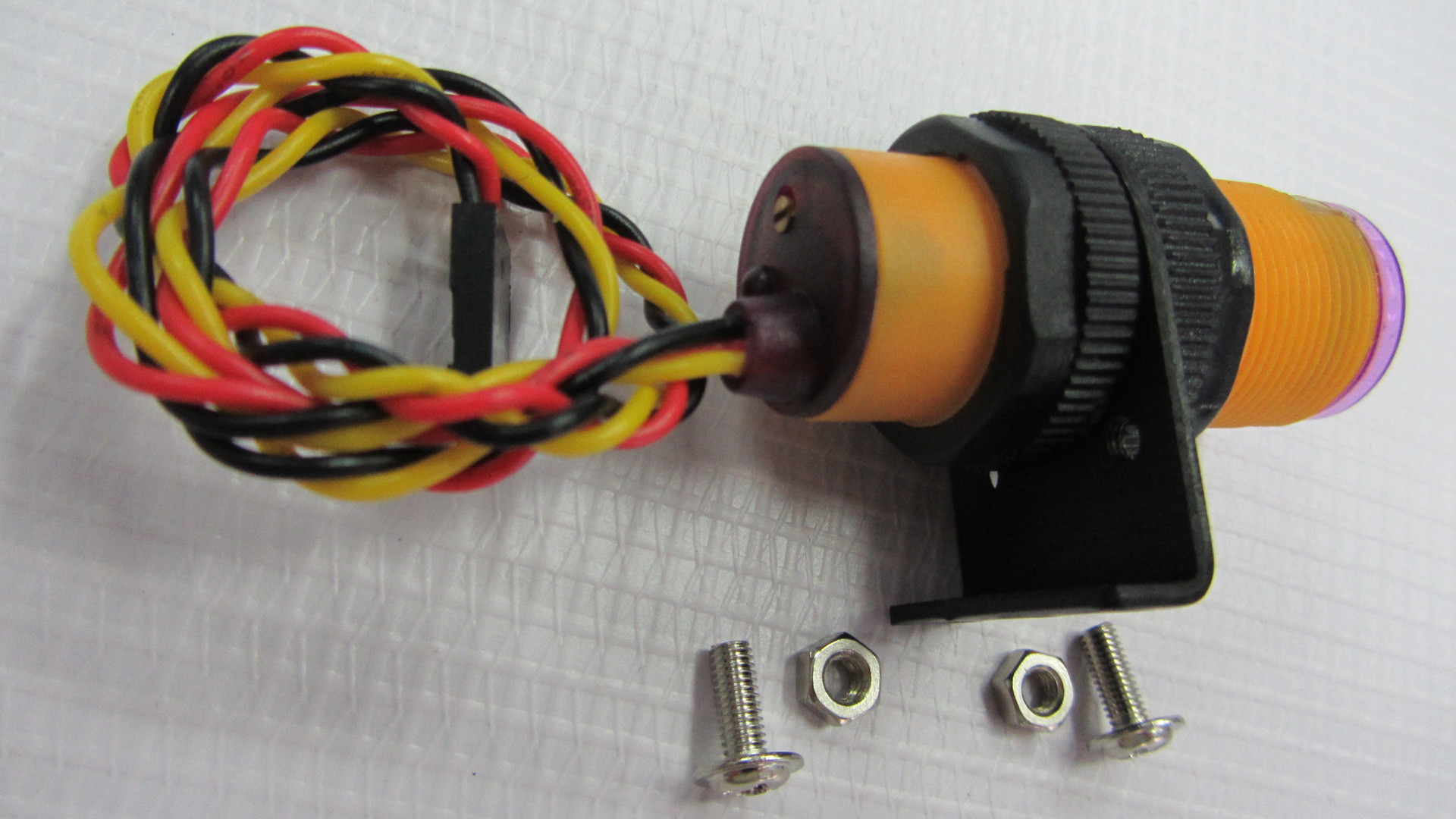
- SEN0019赤外線障害物センサー1 390こする
- FIT0032赤外線障害物センサー用マウント1 90摩擦
- A000066 Arduino Uno 1 1150こする
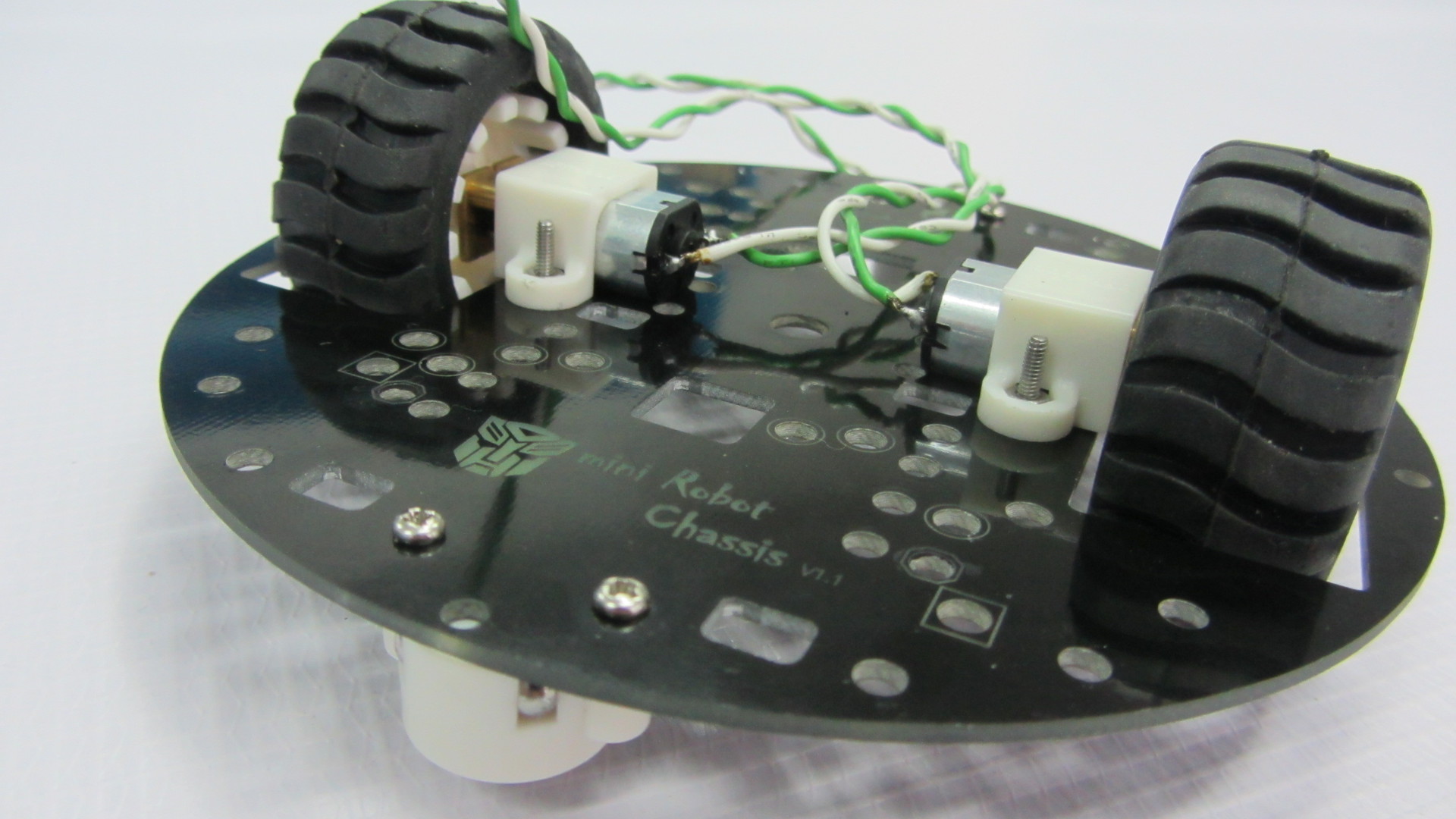
まず、ホイールプラットフォームを組み立て、ワイヤーをエンジンにはんだ付けします。
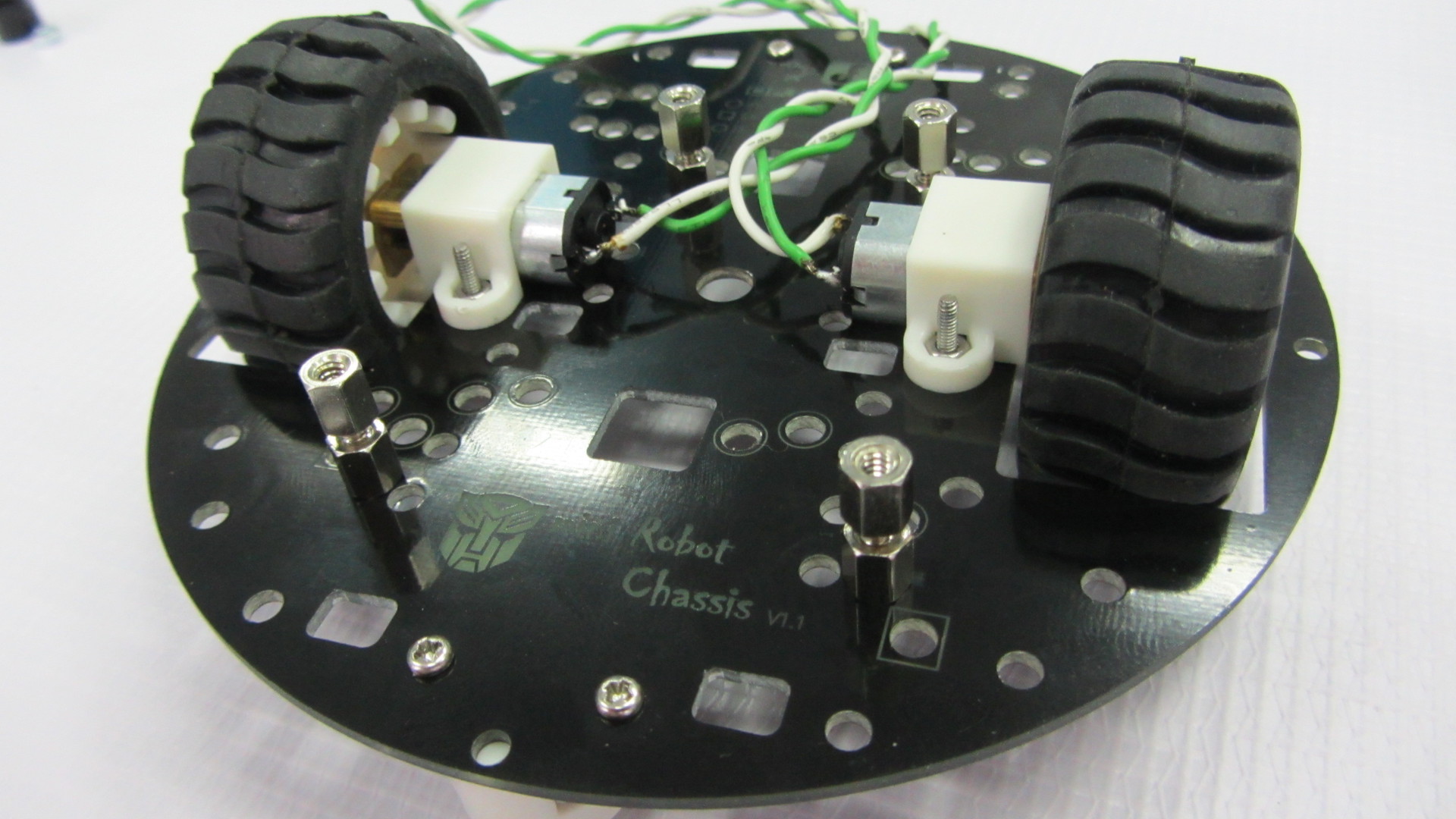
次に、Arduino UNOボードをマウントするためのラックを取り付けます。これは、古いマザーボードまたは他の同様のマウントから取られました。
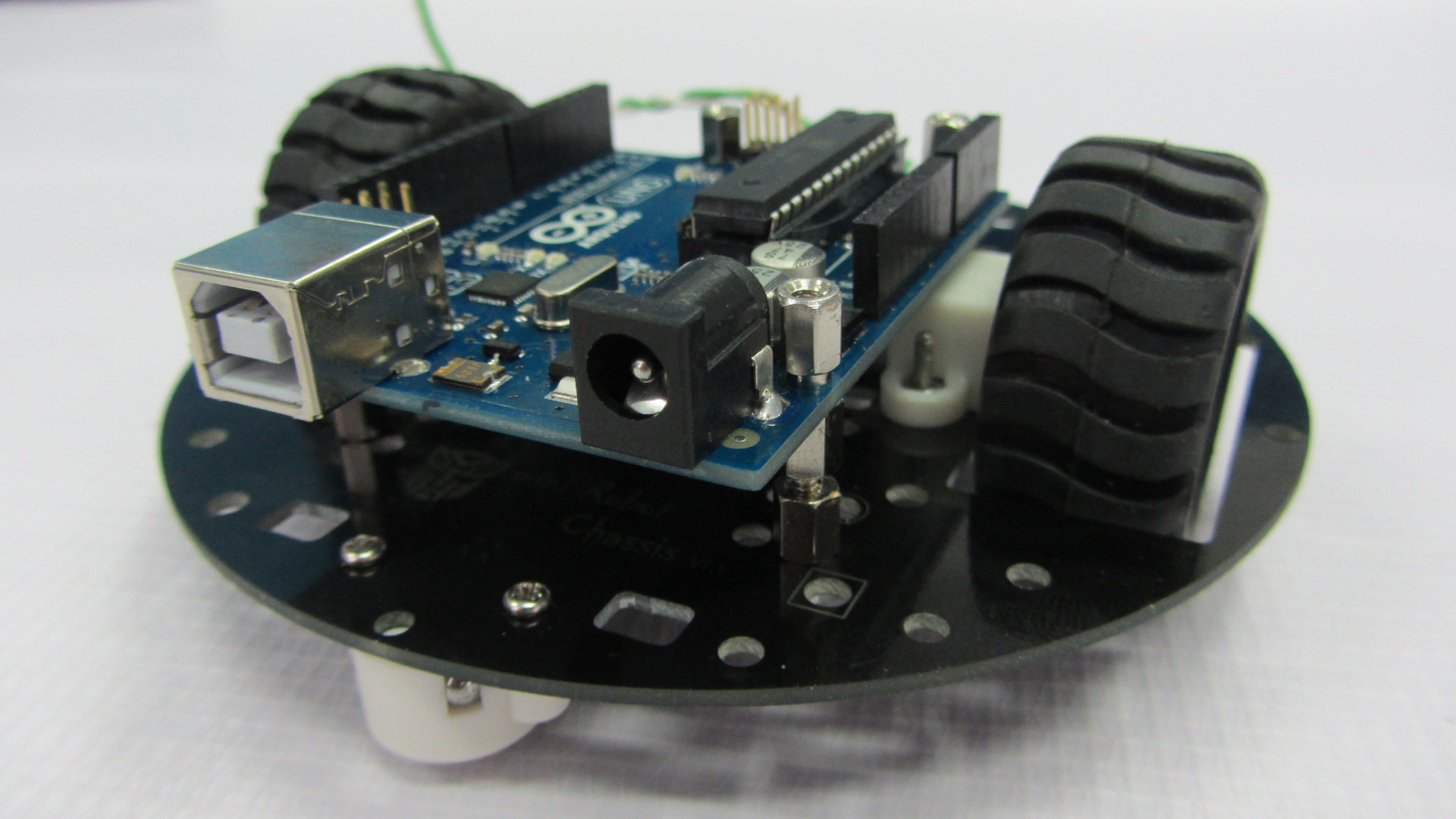
次に、Arduino UNOボードをこれらのラックに取り付けますが、1本のネジを締めることはできません-コネクタが干渉します。 もちろん、それらを取り出すことができますが、それはあなた次第です。
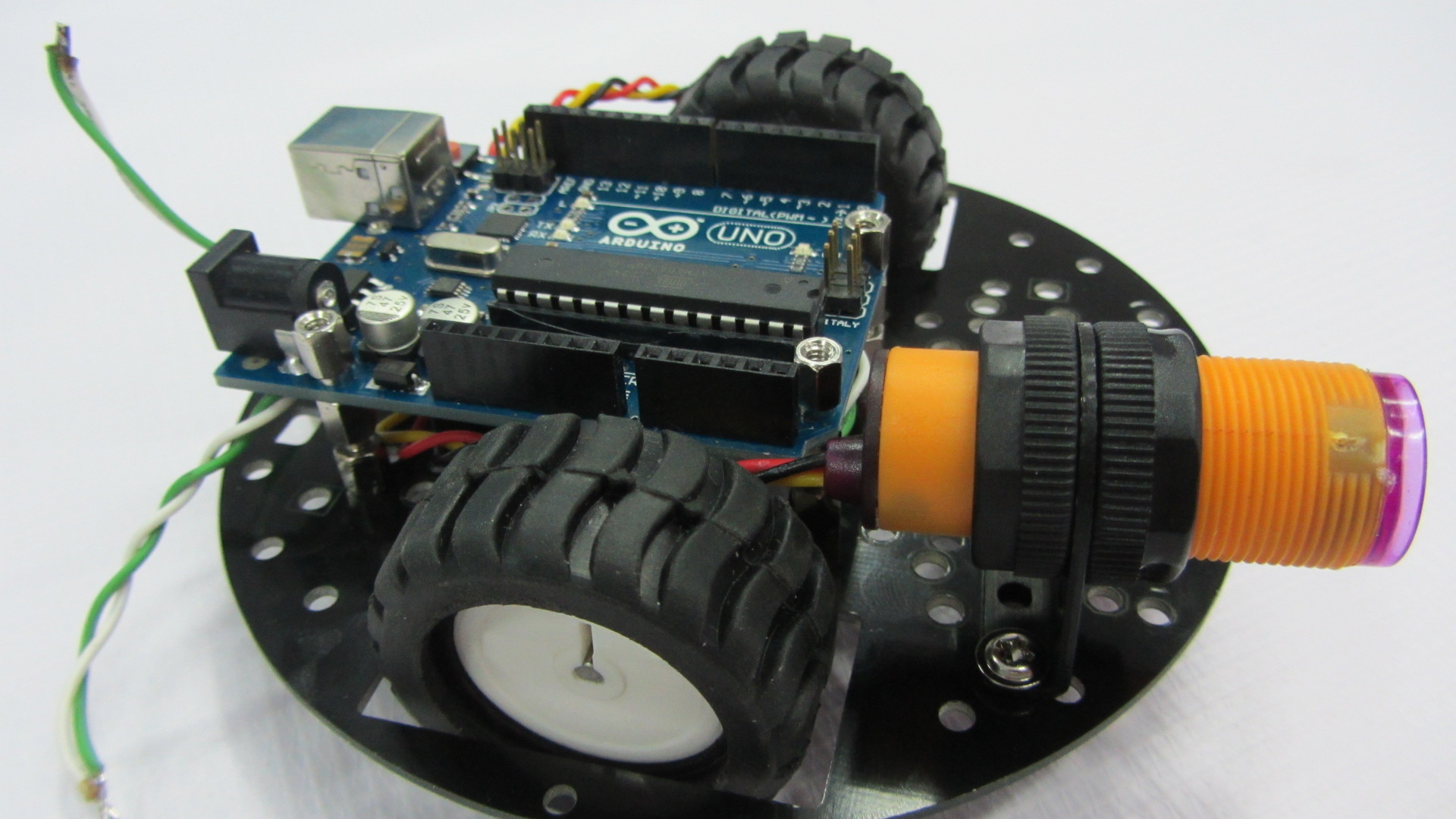
次に、赤外線障害物センサーを特別なマウントに取り付けます。 感度コントロールは上部にあることに注意してください、これは簡単に調整するためです。
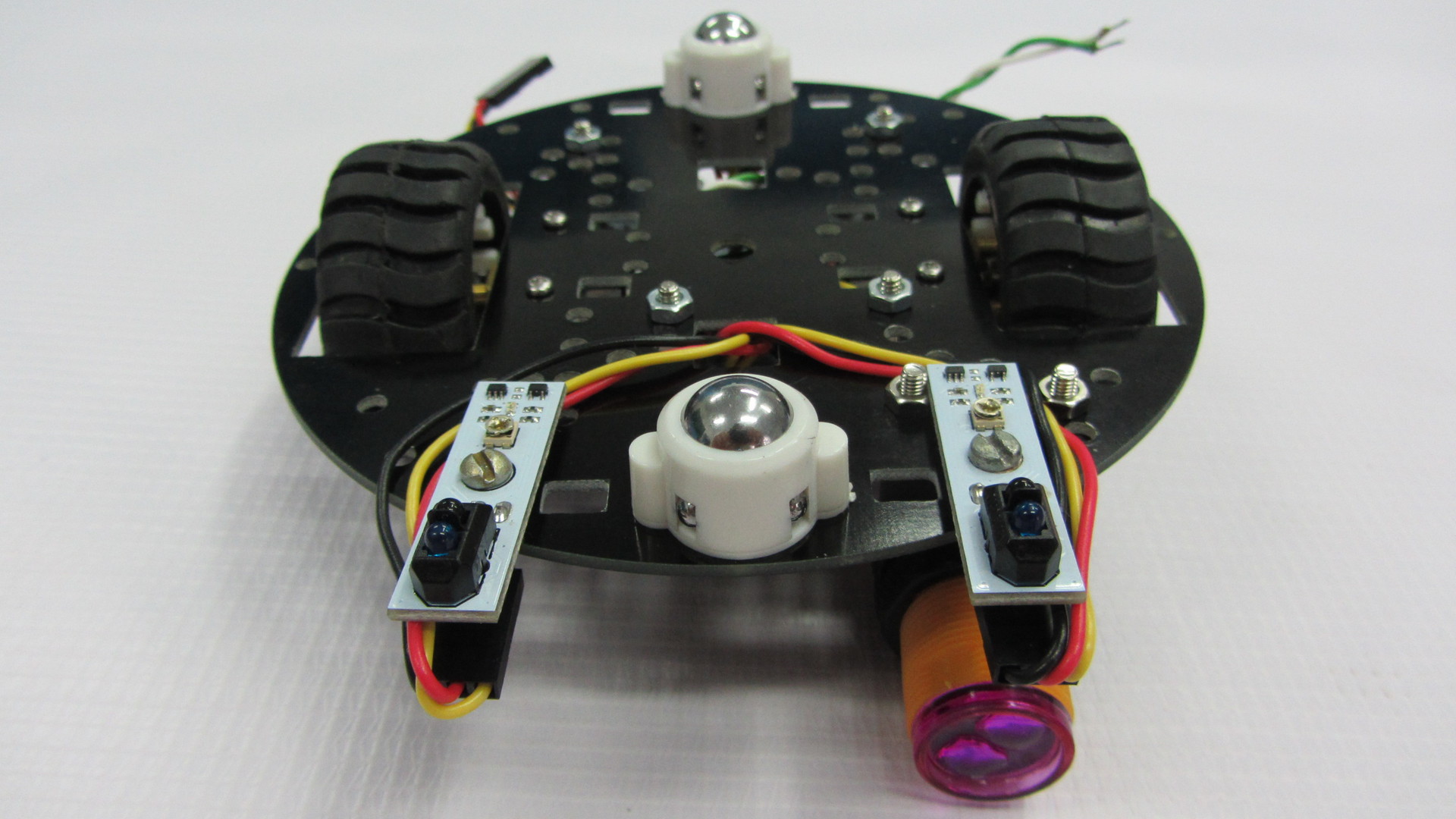
次に、デジタルラインセンサーを取り付けますが、ここでは2本のボルトと4個のナットを探し、プラットフォーム自体とラインセンサーの間に2個のナットを取り付け、残りを残りで固定します。
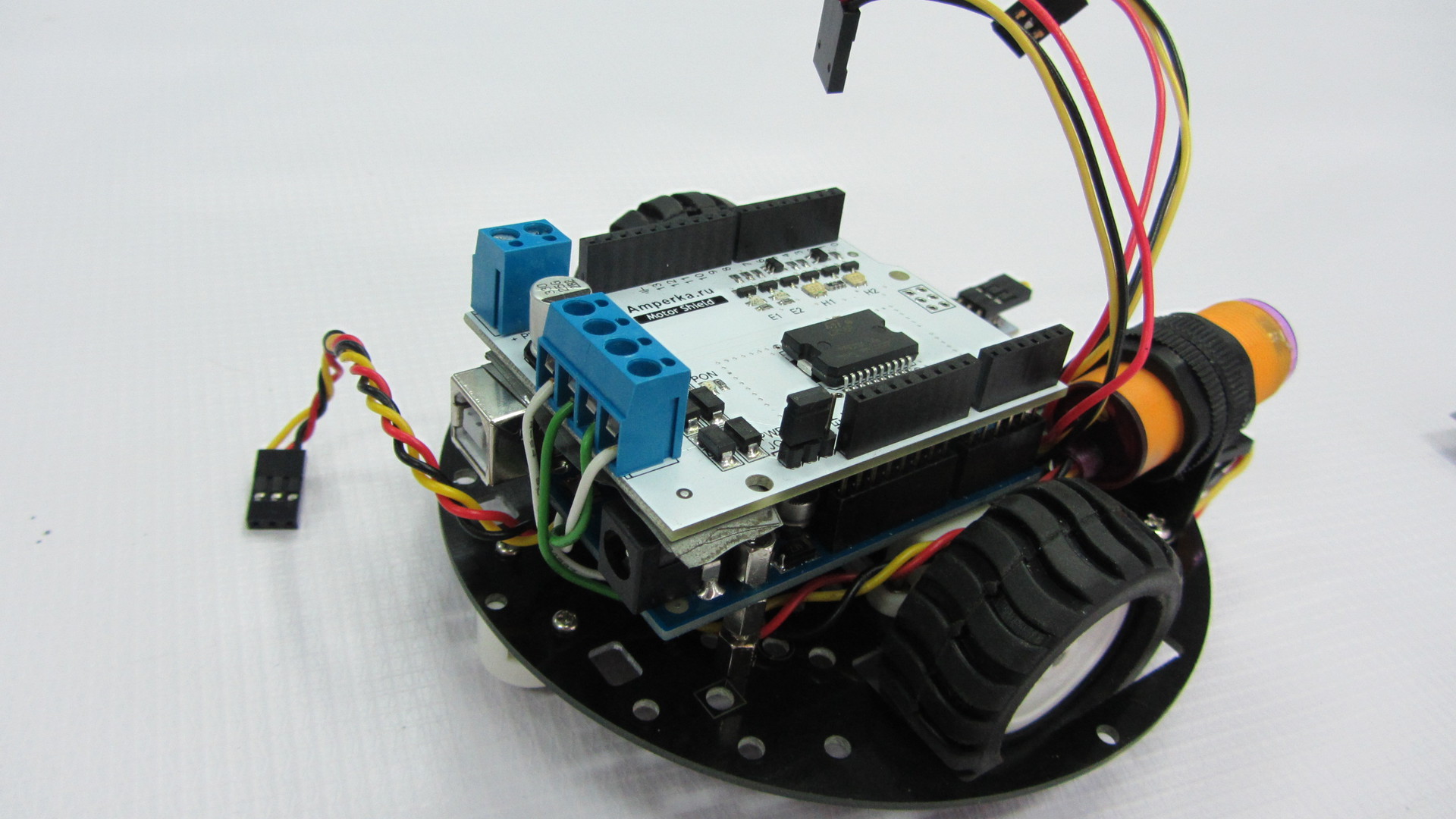
次に、モーターシールドをインストールするか、別の方法でエンジンドライバーを呼び出します。 この場合、ジャンパーに注意してください。 エンジンに個別の電源を使用しないため、この位置に設置されます。 下部は電気テープで密封されているため、万が一に備えてArduino UNO USBコネクタからの偶発的な短絡はありません。
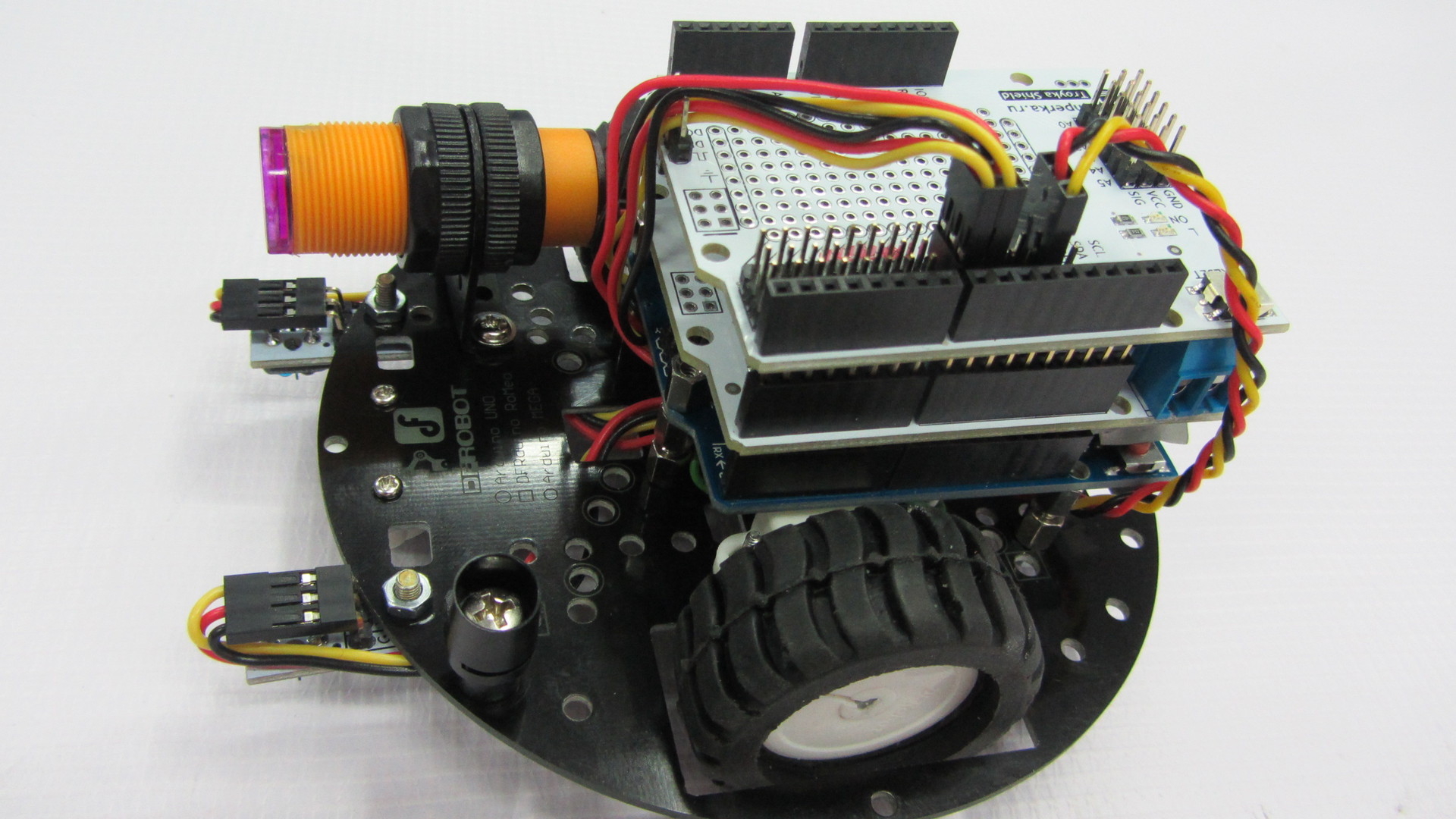
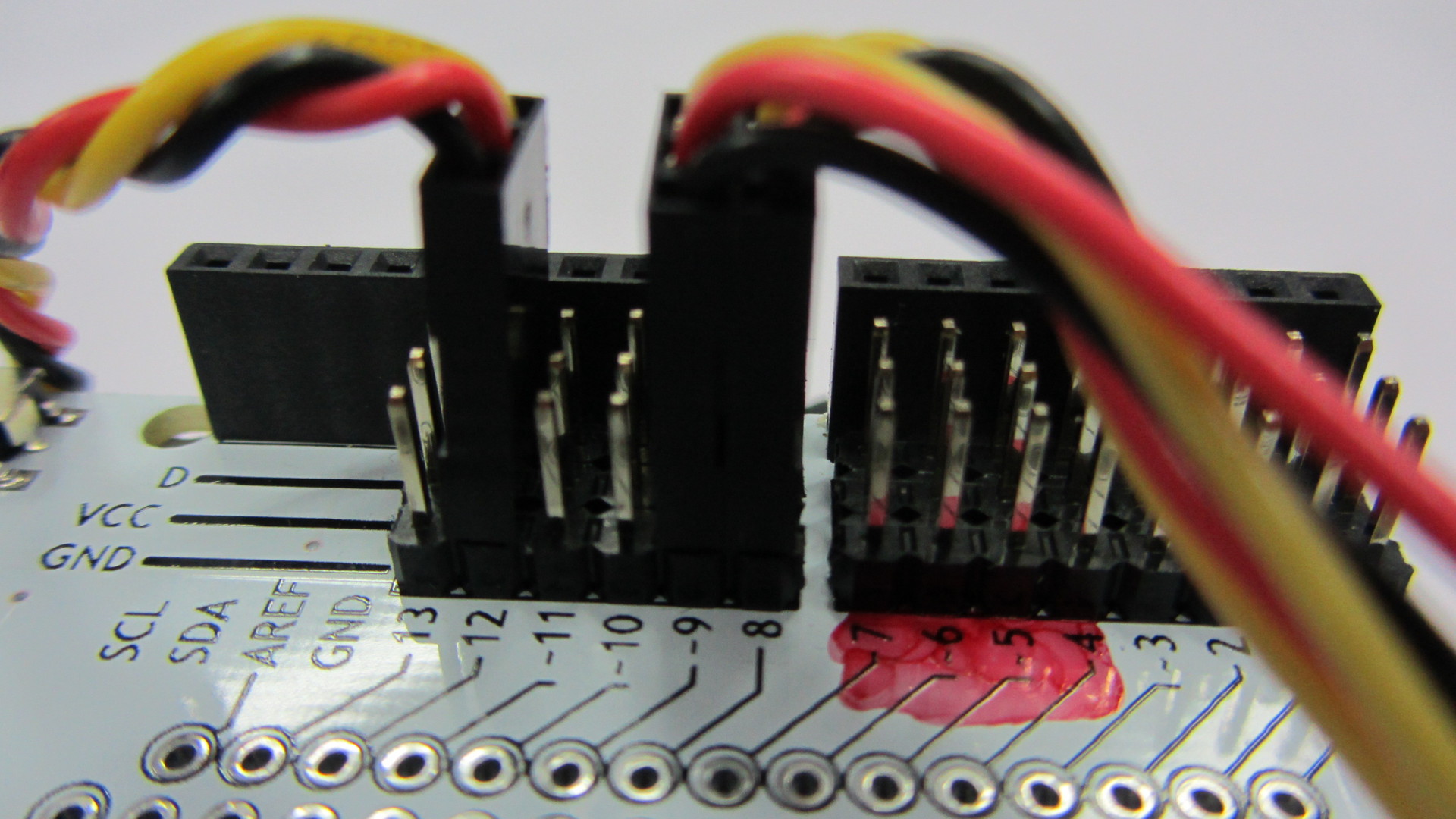
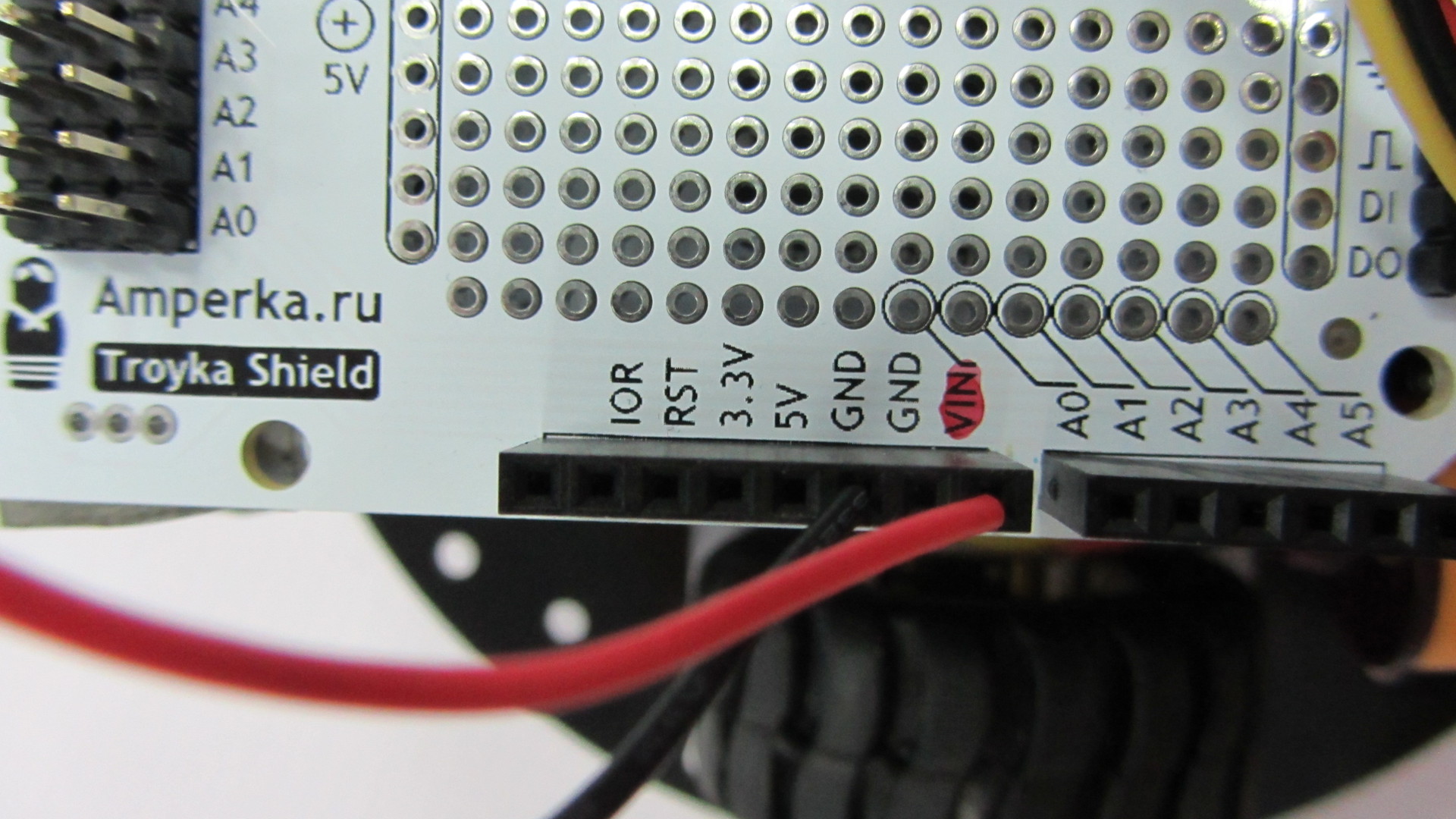
上部モーターシールドはTroyka Shieldをインストールします。 センサー接続の利便性のために必要です。 使用するセンサーはすべてデジタルであるため、ラインセンサーはピンとも呼ばれるポート8および9に接続され、赤外線障害物センサーはポート12に接続されます。 ポート4、5、6、7はエンジンを制御するためにモーターシールドによって使用されるため、使用できないことに注意してください。 学生が理解できるように、これらの港の上に赤いマーカーを特別に塗りました。
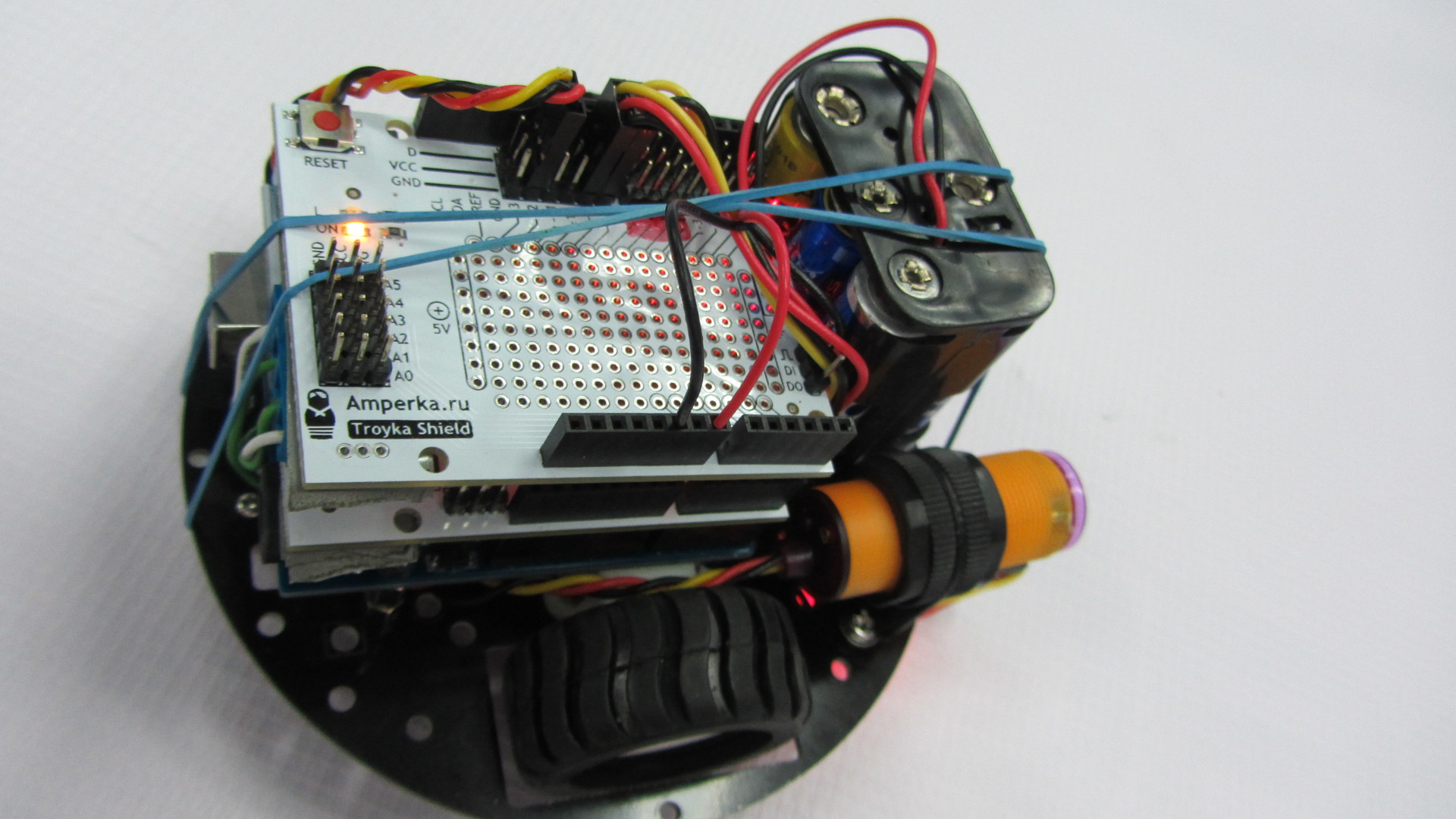
既にお気付きの場合は、念のため黒いスリーブを追加して、取り付けたバッテリーコンパートメントが飛び出さないようにしています。 そして最後に、構造全体を通常の輪ゴムで固定します。
バッテリーコンパートメントの接続には2つのタイプがあります。 Troyka Shieldへのワイヤーの最初の接続。 電源プラグをはんだ付けして、Arduino UNOボード自体に接続することもできます。
これでロボットの準備ができました。 プログラミングを開始する前に、すべてがどのように機能するかを調べる必要があります。
-モーター:
ポート4と5は1つのモーターを制御するために使用され、6と7は別のモーターを制御するために使用されます。
ポート5および6でPWMを使用してエンジン速度を調整します。
前方または後方、ポート4および7に信号を送信します。
-センサー:
すべてがデジタルであるため、1または0の形式で論理信号を提供します。
そして、それらを調整するために、特別なレギュレーターがあり、適切なドライバーを使用して較正することができます。
詳細については、 Amperkaをご覧ください 。 なぜここにあるのですか? Arduinoでの作業に関する多くの情報があるからです。
まあ、おそらく、私たちはすべてを表面的に見て、研究し、そしてもちろん、ロボットを組み立てました。 今、プログラムする必要があります、ここにあります-待望のプログラムです!
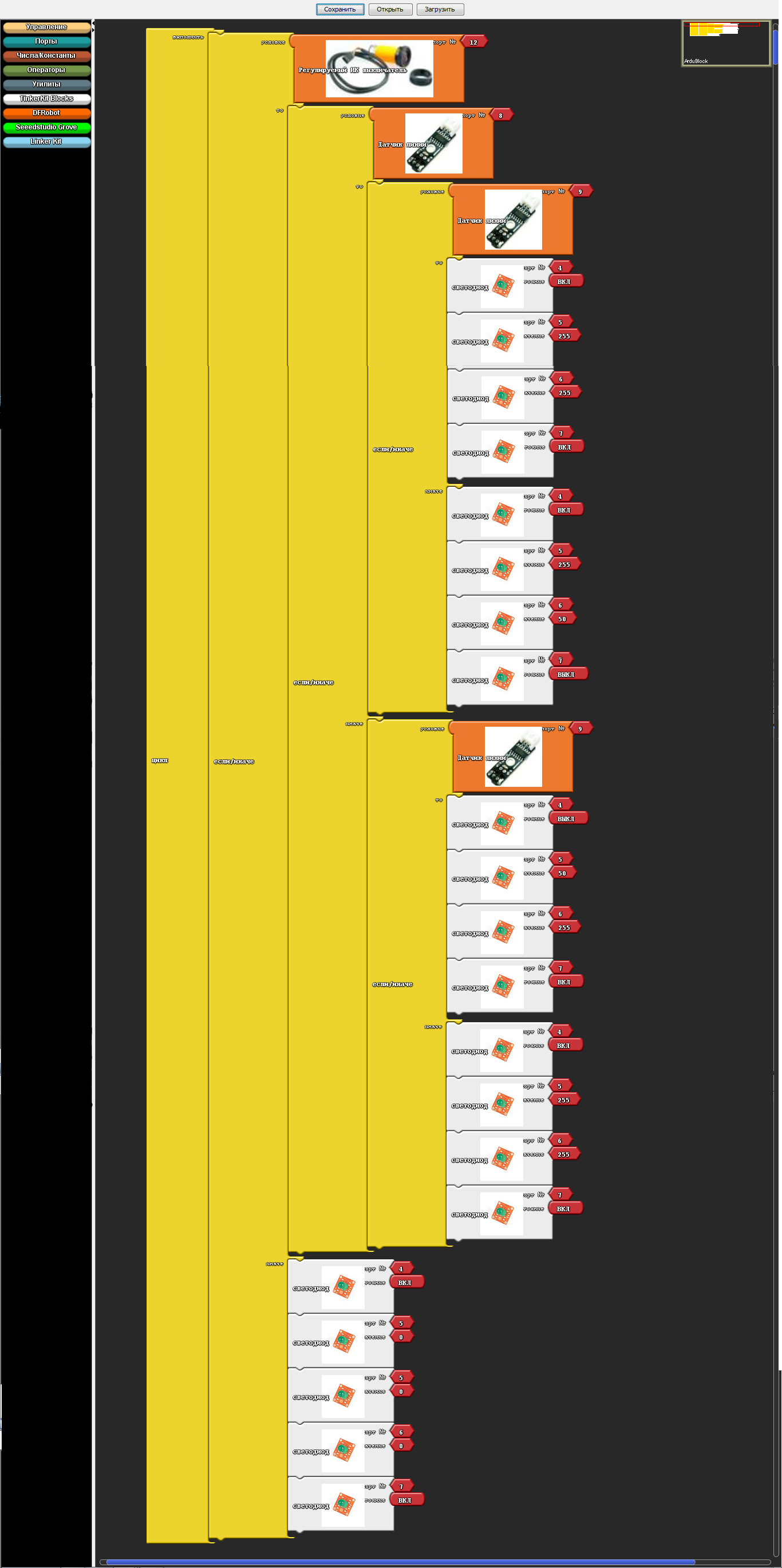
そして、プログラムはArduino IDEに変換されました:
void setup() { pinMode( 8 , INPUT); pinMode( 12 , INPUT); pinMode( 9 , INPUT); pinMode( 4 , OUTPUT); pinMode( 7 , OUTPUT); pinMode(5, OUTPUT); pinMode(6, OUTPUT); } void loop() { if (digitalRead( 12)) { if (digitalRead( 8)) { if (digitalRead( 9)) { digitalWrite( 4 , HIGH ); analogWrite(5, 255); analogWrite(6, 255); digitalWrite( 7 , HIGH ); } else { digitalWrite( 4 , HIGH ); analogWrite(5, 255); analogWrite(6, 50); digitalWrite( 7 , LOW ); } } else { if (digitalRead( 9)) { digitalWrite( 4 , LOW ); analogWrite(5, 50); analogWrite(6, 255); digitalWrite( 7 , HIGH ); } else { digitalWrite( 4 , HIGH ); analogWrite(5, 255); analogWrite(6, 255); digitalWrite( 7 , HIGH ); } } } else { digitalWrite( 4 , HIGH ); analogWrite(5, 0); analogWrite(6, 0); digitalWrite( 7 , HIGH ); } }
結論として、このプログラムは、教育のための天の恵みであり、独学でもArduino IDEチームを学ぶのに役立つと言いたいと思います。 最も重要なハイライトは、50を超えるインストールアイコンが「バギー」し始めることです。 はい、確かに、これはハイライトです。ArduBlokのみでの一定のプログラミングでは、Arduino IDEでのプログラミングは教えられません。 いわゆる「グリッチ」により、プログラムを正確にデバッグするためのコマンドを考えて記憶しようとすることができます。
あなたの成功を祈っています。