d進捗(t)=計画(t)* d t +リスク(t)* d w t
この短い投稿では、特定の計画とリスクが置き換えられます。 特別な奇跡は起こらないとすぐに言わなければなりません。
計画(t)は、時間の経過に伴う進行速度、
リスク(t)は、タスクの完了の遅延、新しいタスクの出現、および一般にあらゆる種類の問題を反映するように設計された、速度への(負の)追加です。 次に、リスクは-riskconstant * plan(t)になります。ここで、最初の要素である値はゼロより大きく1より小さい値です。
進捗(t)は、実際にはプロジェクトのレベルを反映する関数です(初期値は0です。100パーセントに相当する値1に注目します)。
そして、方程式を調べると、言うことができます。
| プロジェクトを完全に完了するには、進行状況を失うリスクが進行状況の成長よりも常に大きいとは限らないことが必要です!
|
方程式、明らかな結論に基づきますが、実際には...人々は常にそれについて考えるとは限りません。
最も興味深いのは、プロセスが複数終了する平均時間です。 これを計算するには、理論( これ )を使用する必要があります。
ビジネスに取り掛かり、いくつかの小さな調査を行いましょう。 4つの計画関数が基礎として採用されます。一定の速度、線形成長、2次関数、平方根です。
この表は、リスク定数= 0.5およびチェック完了時間= 1のスクリーンショット(Wolfram数学の試用がエクスポートで中断した)の結果を示しています。
| 定数関数 | 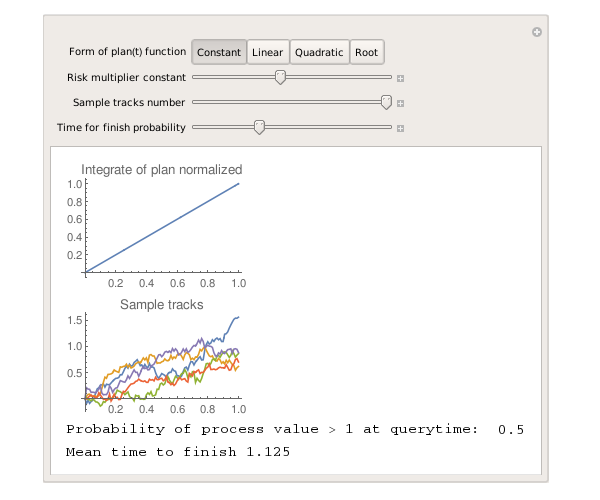 |
| 線形関数 |  |
| 二次関数 | 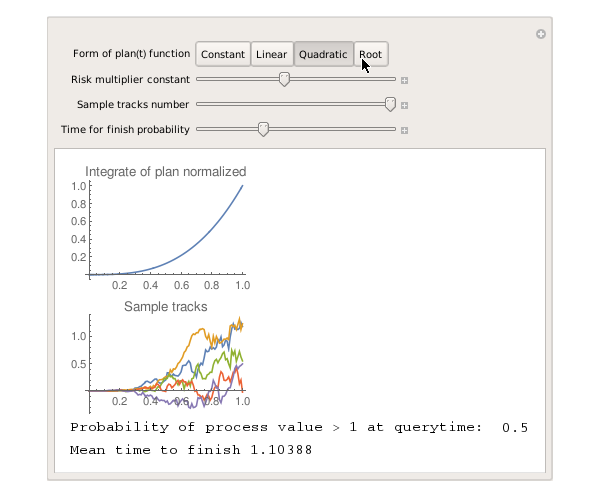 |
| ルート関数 | 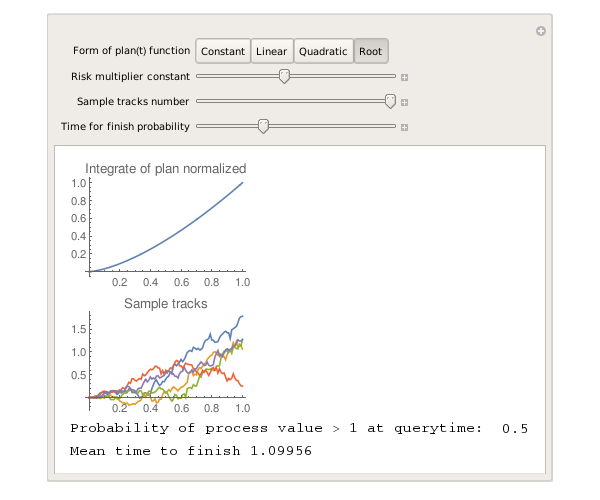 |
そして、ここでどんな結論を引き出すことができますか? はい。特別なことはしません。ただし、フィードバックがない場合(つまり、方程式の右側にある進行状況(t)が関与しない場合)は、リスクがある場合は平均遅延が発生します。 はい。 プロジェクト内で成長の進捗をプッシュしない場合(つまり、最初はリスクを前後に動かさない)、0.5の確率でスケジュールどおりになります(これらの0.5は、リスク定数= 0.5に直接関連していません。この場合は偶然です)。
CDF(バージョン10.0用)はここからダウンロードできます 。
PSあなたはエラーを見つけるでしょう-トライアルが終わるまで緊急に書き込みます:) 3週間で、キャリッジはカボチャに変わります。
ラットに関するPPS。 提案-同じ方法:突然、誰かが特定のフィードバック方程式、またはそのような何かをアドバイスします。