世界では、いくつかの企業が異なる数の手足を持つロボットの作成にすぐに取り組んでおり、計画どおり、活動の一部の領域で信頼できる人間のアシスタントになることができます。 少し前まで、 KAIST Korea Universityで、時速45 kmを超える速度で実行できるRaptor tailロボットを作成します。
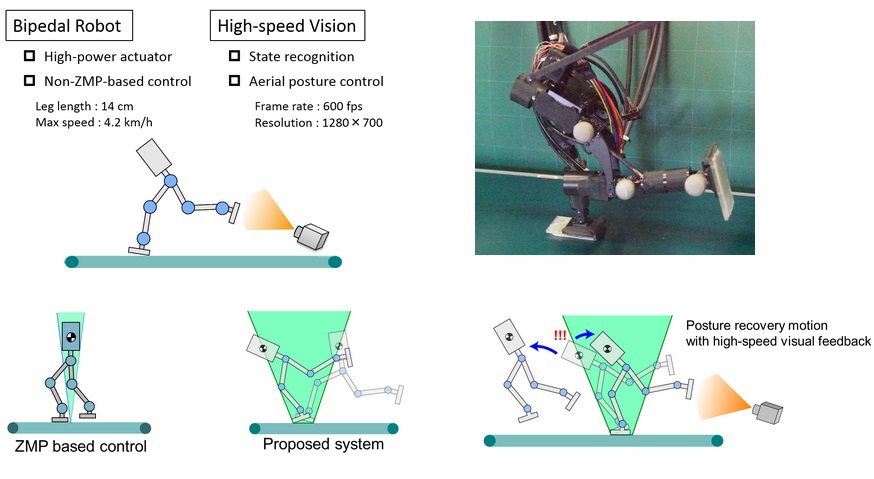
東京大学の専門家は別の道を歩み、小さな二足ロボットを作成しました。 デバイスの速度は時速4.2キロメートルであり、これは世界最速の2本足ロボットの1つです。 速度を評価するときは、ロボットの寸法(高さわずか14センチ)も考慮する必要があります。
前述のように、科学者は新しいロボットバランスシステムを適用しています。 「 ゼロバランスポイント 」方式が通常使用される場合、ここで科学者は高速カメラと安定化モーターで構成される新しいシステムを作成しました。 その結果、ロボットはつまずきません、そして、科学者によると、それは宙返りを行うことさえできます。
このように小さなサイズで高速を実現するためには、ロボットが「脚」を整理する必要が非常に多いことに注意してください。 ロボットの実行時間はわずか10秒ですが、科学者はこの時間を増やすために取り組んでいます。
ちなみに、この同じロボット工学チームは、石川教授の指導の下で、「じゃんけん」のプレイヤーである別のロボットを作成しました。 このロボットは、同じ高速カメラの存在と、人の手のひらと指の動きを決定するための特別なアルゴリズムのおかげで、常に人間を打ち負かします。
U-Tokyo経由