機関NASAは最近、小惑星の研究用のロボットを作成するプロジェクトの立ち上げを発表しました。 同時に、ロボットは小惑星の表面で動作するため、作業が困難になります。
事実、小惑星の重力では、能動的に動く追跡、反動、歩行装置を保持することはできません。 小さなミス、もう少し積極的なプッシュ-それだけです。ロボットは宇宙に飛び込み、小惑星に関する情報を受信することを希望しますが、同じ場所に送信されます。
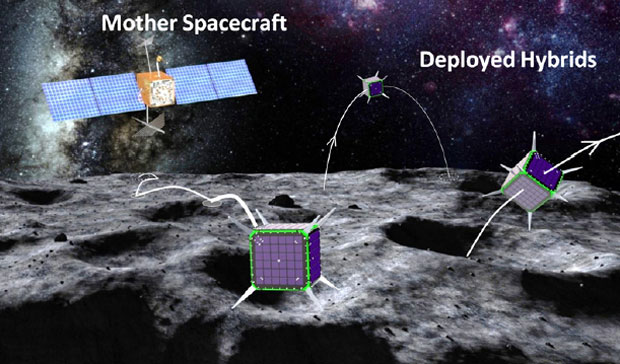
NASAは、車輪付き、追跡付き、歩行用、および他のすべてのタイプの車両を使用せずに、小惑星ではなく慣性システムで作業することにしました。 横から見ると、ローリングキューブのように見えます。 すべてこのように機能します:
またはこのように:
もちろん、そのような慣性システムは、微小重力の状態に応じて改良する必要があります。 ちなみに、ほぼそのようなシステムは、宇宙望遠鏡や宇宙で動作する他のデバイスで使用されています。 このようなデバイスの空間内の位置を変更するには、フライホイールが使用されます。 小惑星の表面でプローブを移動させる計画された方法は、最も正確な移動方法ではありませんが、そのような条件下では非常に効果的です。
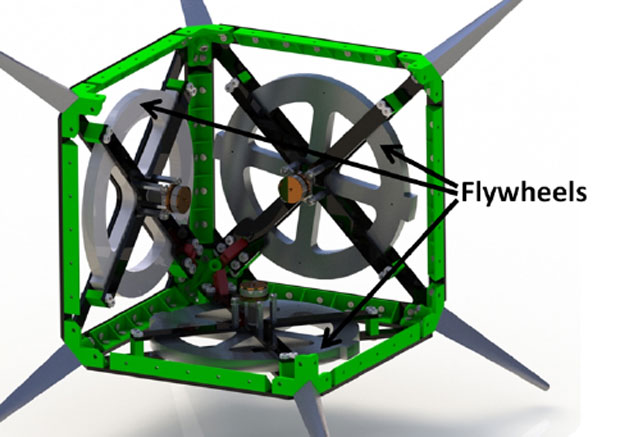
さらに、立方体の外側から可動部分がなくなるため、消費されるエネルギーはほとんどありません。 慣性キューブにエネルギーを供給するために、ハウジングに配置されたソーラーパネルが使用されます。 さらに、このようなプローブには科学機器を組み込むことができ、さまざまなパラメーターに従ってオブジェクトを調査します。
そのようなプローブ、デバイスは単純で、それほど高価ではないことが計画されています。 子宮船はそれらを小惑星に届け、標的に到達すると立方体のグループを投げます。 キューブ用のコマンドは、このような船を介して送信されます。
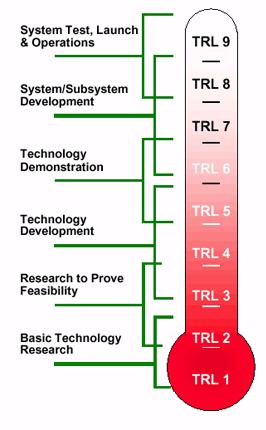
計画によると、現在の資金調達は、プロジェクトを最終段階、つまりキューブの最終バージョンを作成することを目的とするものではありません。 これはまだ長い道のりです。 NASAによると、プロジェクトの目標は、TRL( Technology Readiness Levels )パラメーターを3.5にすることです。 これでTRL = 2になります。これは、「プロジェクトの定式化された技術的アイデア」を意味します。 レベル3はすでに、アイデアの作業能力の理論的および実用的な証拠です。 レベル4-プロトタイプの要素とプロトタイプ自体の作成。シミュレーション環境で機能することができます。
一般に、現在のプロジェクトの最終段階は、おそらくキューブのレイアウトの一部または少なくともコンピューターモデルの製造を伴う「ジャンピングキューブ」のアイデアの操作性の証明です。
ちなみに、TRLレベル8は、実際のテストと可能な限り類似した条件下ですべてのテストに既に合格した完全に機能するシステムを製造することを意味します。 小惑星への飛行はまだ遠く、時間がかかります。そのため、ホッピングキューブプロジェクトは実現する可能性がすべてあります。
IEEE経由