
猫の下で興味がある人に聞いてみてください。
導入する代わりに
最近、生命の自動化などの情報技術の分野に関心が高まっているという顕著な傾向があります。 自動化自体は新しい現象とはほど遠いものであり、何十年もの間、ほとんどの産業企業にとってそれは気まぐれではなく、必要であり、それなしでは激しい競争に直面したビジネスの存続は考えられません。 それでは、なぜ今、モノのインターネット、M2M(Machine-to-Machine)コミュニケーション、およびその他の「スマート」テクノロジーについてこれほどまでに耳にするのでしょうか。 おそらくその理由は、多くの同様の場合と同様に、特定の「クリティカルマス」のイノベーションが得られ、一般大衆向けの要素ベースが利用可能になったためです。 インターネットの開発とインターネット技術の利用が、これまで世界を変えている情報プロジェクトの波を引き起こしたように、今、プログラミング、マイクロエレクトロニクス、インターネットなどの多くの「レンガ」が作成されているのを目撃しています興味深い家庭用ソリューション。 それらのすべてが「離陸」するわけではなく、これは絶対に正常ですが、それらの多くは本当に素晴らしいものの基礎(またはインスピレーション)になります。
個人的に、私はここ数年これに非常に積極的に興味を持っていて、MajorDoMo Smart Homeオープンプロジェクトについて聞いた人もいるかもしれません。 しかし、今は彼のことではなく、いくつかの並行プロジェクト、別の実験、もしあなたが好きなら、それは少し前に私を驚かせ、その結果をこの記事で共有します。
スマートホームプラットフォームのプロジェクトである「荷物」の中では、非常に柔軟に使用できますが、多くの可能性には適切な機器が必要であり、常に便利で実用的ではないという事実を考えました。 「小さな」自動化の一部のタスクについては、1つのマイクロコントローラーで対応できますが、ここでは既に柔軟性を失い、ユーザースキルの要件を高めています。 ある種の中間オプションの必要性があることは私には明らかでした。非常にコンパクトでエネルギー効率がよく、同時に構成と使用に柔軟性があります。 このオプション「Smart Point」またはSmartPointに有効な名前を付けましょう。 途中で、このデバイスで受け取ることができる可能性についての願いの全リストが形成されました。
挑戦する
歌詞から練習まで。 SmartPointデバイスの基本要件は次のとおりです。
- センサーからのイベントに応答するための柔軟なルールシステム
- 手動制御用のWebインターフェイス
- より複雑な複合体に統合するためのHTTP API
- オンライン操作-ルーターで静的IPおよびポート転送を行わずに、インターネット経由でデバイスのWebインターフェースにアクセスします
- オフライン操作-構成されたデバイスの機能は、インターネットアクセスの可用性に依存してはなりません。
デバイスに対する追加の(実用的な)要望:
- WiFiの仕事
- 組み込みセンサーとアクチュエータモジュールの存在(デバイスは「理論上」ではなく、「箱から出して」すぐに実用的である必要があります)
- よりシンプルなセンサー/アクチュエーターとの相互作用のためのワイヤレス「ローカル」インターフェース
- デバイスの操作を設定および監視するためのインターネットサービス(個人アカウント)
コントローラー、ホスト、周辺機器
何度も何度もこの概念と「ウィッシュリスト」のかなりのセットを熟考して、1つのマイクロコントローラーで管理することは不可能であるという結論に達しました。 第一に、低レベルですべての計画を実行できるほどそれらをプログラミングする方法がまだよくわからず、第二に、すべてのコントローラーがそのような欲望をするわけではありません。 最も抵抗の少ない経路をとることが決定されました-デバイスを2つの論理部分に分割します:1つ(「コントローラー」)はマイクロコントローラーに基づき、ハードウェアとの基本的な対話を担当し、2つ目(「ホスト」)は組み込みLinuxに基づいて、より多くの役割を果たします高レベル(インターフェース、ルールのシステム、API)。 Arduinoマイクロコントローラーが最初のブロックとして選択され(推測!)、OpenWRTファームウェアを備えたTP-Link WR703Nルーターが2番目のブロックとして使用されました(注:DLink Dir-320ルーター上の同様のデバイスのペアが正常に組み立てられました)。 正しい怒りを予想して、私はあなたがタスクが最初にプロトタイプの概念の実行可能性をテストすることであり、商用デバイスを設計して組み立てることではないことを思い出させたいです。 さらに、これらのコンポーネントを使用すると、デバイスの繰り返しが容易になります-長いライブオープンソース! Arduinoを使用すると、無数のセンサーとアクチュエーターをデバイスに接続する経験を適用できます。
TP-Link WR703Nルーター:

マイクロコントローラーArduino Nano:

次の要素が周辺機器の初期セットとして選択されました。
- ボタン

- モーションセンサー

- DS18B20温度センサー

- 433Mhzレシーバー
- ヌーライトライトコントロールトランスミッター

ご存知のように、周辺機器のセットは異なる場合がありますが、この例では、上記の「実用的なユーティリティ」の原理に基づいてこれを取り上げました。 したがって、私たちのデバイスは、ボタンの押下、動き、温度変化に応答し、外部センサーからデータを受信し(この場合、 ハブで前述したプロトコルを使用しました )、Nooliteシステムの電源モジュールを制御できます(制御モジュールについては別の話があります)また、写真はモジュールの商用コピーではなく、メーカーからの最も初期のプロトタイプの1つであり、テストのために私のところに来ました。
実装ドラフトと初期要件を組み合わせると、デバイスの次のブロック図が得られます。
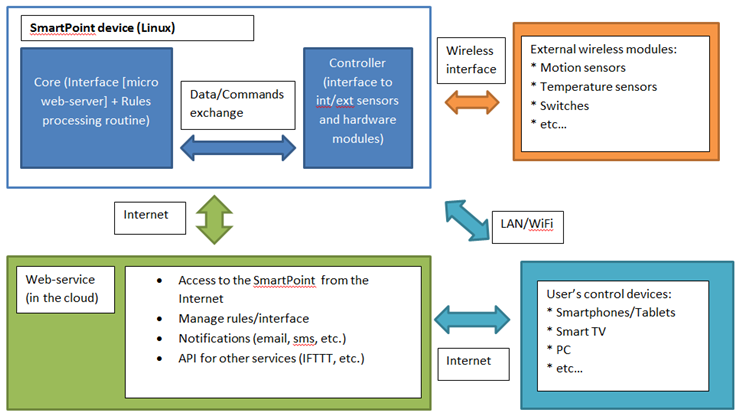
スキームの説明:
- このデバイスは、有線/無線周辺機器と相互作用するマイクロコントローラーと、入力処理ロジックとインターフェースを担当するコアで構成されています
- 外部の「端末」(コンピューター、電話など)からコマンドを受信するためのAPIとWebインターフェイスがあります
- ルールのダウンロード、通知の送信、コマンドの受信のために外部サービスと通信するデバイス
マイクロコントローラーの準備
マイクロコントローラーには2つの主なタスクがあります。1つ目は、外部デバイスからコンソールにイベントを出力すること、2つ目は、接続された周辺機器に送信するコマンドをコンソールから受信することです。
以下は、上記の周辺機器の詳細を考慮したスケッチのテキストです。 この場合、ボタンはPIN4に、モーションセンサーはPIN3に、温度センサーはPIN9に、ラジオはPIN8に、NooliteモジュールはPIN 10、11に接続されます。
コントローラーのスケッチ
#include <OneWire.h> #include <DallasTemperature.h> #include <VirtualWire.h> #include <EasyTransferVirtualWire.h> #include <EEPROM.h> //Needed to access the eeprom read write functions #include <SoftwareSerial.h> #define PIN_LED (13) // INDICATOR #define PIN_PIR (3) // BUTTON #define PIN_BUTTON (4) // BUTTON #define PIN_LED_R (6) // INDICATOR RED #define PIN_LED_G (5) // INDICATOR GREEN #define PIN_LED_B (7) // INDICATOR BLUE #define PIN_RF_RECEIVE (8) // EASYRF RECEIVER #define PIN_TEMP (9) // TEMPERATURE SENSOR #define PIN_NOO_RX (10) // RX PIN (connect to TX on noolite controller) #define PIN_NOO_TX (11) // TX PIN (connect to RX on noolite controller) #define TEMP_ACC (0.3) // temperature accuracy #define PERIOD_READ_TEMP (20) // seconds #define PERIOD_SEND_TEMP (600) // seconds (10 minutes) #define PERIOD_SEND_UPTIME (300) // seconds (5 minutes) #define NOO_BUF_LEN (12) unsigned int unique_device_id = 0; long int uptime = 0; long int old_uptime = 0; float sent_temperature=0; int sent_pir=0; int sent_button=0; int sent_button_longlick=0; long int timeCheckedTemp=0; long int timeSentTemp=0; long int timeSentUptime=0; long int timeButtonPressed=0; String inData; //create objects SoftwareSerial mySerial(PIN_NOO_RX, PIN_NOO_TX); // RX, TX OneWire oneWire(PIN_TEMP); DallasTemperature sensors(&oneWire); EasyTransferVirtualWire ET; unsigned int last_packet_id = 0; struct SEND_DATA_STRUCTURE{ //put your variable definitions here for the data you want to send //THIS MUST BE EXACTLY THE SAME ON THE OTHER ARDUINO //Struct can'e be bigger then 26 bytes for VirtualWire version unsigned int device_id; unsigned int destination_id; unsigned int packet_id; byte command; int data; }; //give a name to the group of data SEND_DATA_STRUCTURE mydata; //This function will write a 2 byte integer to the eeprom at the specified address and address + 1 void EEPROMWriteInt(int p_address, unsigned int p_value) { byte lowByte = ((p_value >> 0) & 0xFF); byte highByte = ((p_value >> 8) & 0xFF); EEPROM.write(p_address, lowByte); EEPROM.write(p_address + 1, highByte); } //This function will read a 2 byte integer from the eeprom at the specified address and address + 1 unsigned int EEPROMReadInt(int p_address) { byte lowByte = EEPROM.read(p_address); byte highByte = EEPROM.read(p_address + 1); return ((lowByte << 0) & 0xFF) + ((highByte << 8) & 0xFF00); } void nooSend(byte channel, byte buf[NOO_BUF_LEN]) { buf[0]=85; buf[1]=B01010000; // buf[4]=0; buf[5]=channel; buf[9]=0; int checkSum; for(byte i=0;i<(NOO_BUF_LEN-2);i++) { checkSum+=buf[i]; } buf[10]=lowByte(checkSum); buf[11]=170; Serial.print("Sending: "); for(byte i=0;i<(NOO_BUF_LEN);i++) { Serial.print(buf[i]); if (i!=(NOO_BUF_LEN-1)) { Serial.print('-'); } } Serial.println(""); for(byte i=0;i<(NOO_BUF_LEN);i++) { mySerial.write(buf[i]); } } void noolitePair(byte channel) { byte buf[NOO_BUF_LEN]; for(byte i=0;i<(NOO_BUF_LEN);i++) { buf[i]=0; } buf[2]=15; buf[3]=0; nooSend(channel,buf); } void nooliteUnPair(byte channel) { byte buf[NOO_BUF_LEN]; for(byte i=0;i<(NOO_BUF_LEN);i++) { buf[i]=0; } buf[2]=9; buf[3]=0; nooSend(channel,buf); } void nooliteTurnOn(byte channel) { byte buf[NOO_BUF_LEN]; for(byte i=0;i<(NOO_BUF_LEN);i++) { buf[i]=0; } buf[2]=2; buf[3]=0; nooSend(channel,buf); } void nooliteTurnOff(byte channel) { byte buf[NOO_BUF_LEN]; for(byte i=0;i<(NOO_BUF_LEN);i++) { buf[i]=0; } buf[2]=0; buf[3]=0; nooSend(channel,buf); } void nooliteSwitch(byte channel) { byte buf[NOO_BUF_LEN]; for(byte i=0;i<(NOO_BUF_LEN);i++) { buf[i]=0; } buf[2]=4; buf[3]=0; nooSend(channel,buf); } void nooliteLevel(byte channel,byte level) { byte buf[NOO_BUF_LEN]; for(byte i=0;i<(NOO_BUF_LEN);i++) { buf[i]=0; } buf[2]=6; buf[3]=1; buf[6]=level; nooSend(channel,buf); } void blinking(int count) { for(int i=0;i<count;i++) { digitalWrite(PIN_LED, HIGH); delay(200); digitalWrite(PIN_LED, LOW); delay(200); } } void setColor(int r,int g, int b) { digitalWrite(PIN_LED_R, r); digitalWrite(PIN_LED_G, g); digitalWrite(PIN_LED_B, b); } void setup() { randomSeed(analogRead(0)); pinMode(PIN_LED, OUTPUT); pinMode(PIN_LED_R, OUTPUT); pinMode(PIN_LED_G, OUTPUT); pinMode(PIN_LED_B, OUTPUT); pinMode(PIN_PIR, INPUT); pinMode(PIN_BUTTON, INPUT); Serial.begin(9600); // Debugging only ET.begin(details(mydata)); // Initialise the IO and ISR vw_set_rx_pin(PIN_RF_RECEIVE); vw_setup(2000); // Bits per sec vw_rx_start(); // Start the receiver PLL running // Device ID Serial.print("Getting Device ID... "); unique_device_id=EEPROMReadInt(0); if (unique_device_id<10000 || unique_device_id>60000 || unique_device_id==26807) { Serial.print("N/A, updating... "); unique_device_id=random(10000, 60000); EEPROMWriteInt(0, unique_device_id); } Serial.println(unique_device_id); pinMode(PIN_NOO_RX, INPUT); pinMode(PIN_NOO_TX, OUTPUT); mySerial.begin(9600); } void loop() { uptime=round(millis()/1000); if (uptime!=old_uptime) { Serial.print("Up: "); Serial.println(uptime); old_uptime=uptime; if (((uptime-timeSentUptime)>PERIOD_SEND_UPTIME) || (timeSentUptime>uptime)) { timeSentUptime=uptime; Serial.print("P:"); Serial.print(random(65535)); Serial.print(";F:"); Serial.print("0"); Serial.print(";T:0;C:"); Serial.print("24"); Serial.print(";D:"); Serial.print(uptime); Serial.println(";"); } } int current_pir=digitalRead(PIN_PIR); if (current_pir!=sent_pir) { Serial.print(millis()/1000); Serial.print(" Motion sensor: "); Serial.println(current_pir); Serial.print("P:"); Serial.print(random(65535)); Serial.print(";F:"); Serial.print("0"); Serial.print(";T:0;C:"); Serial.print("12"); Serial.print(";D:"); Serial.print("1"); Serial.println(";"); sent_pir=(int)current_pir; } int current_button=digitalRead(PIN_BUTTON); if (current_button!=sent_button) { delay(50); int confirm_current_button=digitalRead(PIN_BUTTON); if (confirm_current_button==current_button) { if (current_button==1) { timeButtonPressed=millis(); sent_button_longlick=0; } if (current_button==0) { if (sent_button_longlick!=1) { Serial.print(millis()/1000); Serial.print(" Button press: "); Serial.println(current_button); Serial.print("P:"); Serial.print(random(65535)); Serial.print(";F:"); Serial.print("0"); Serial.print(";T:0;C:"); Serial.print("23"); Serial.print(";D:"); Serial.print("3"); Serial.println(";"); } } sent_button=(int)current_button; } } else { if (current_button==1) { int passed=millis()-timeButtonPressed; if ((passed>3000) && (sent_button_longlick!=1)) { sent_button_longlick=1; Serial.print(millis()/1000); Serial.print(" Button long press: "); Serial.println(current_button); Serial.print("P:"); Serial.print(random(65535)); Serial.print(";F:"); Serial.print("0"); Serial.print(";T:0;C:"); Serial.print("23"); Serial.print(";D:"); Serial.print("4"); Serial.println(";"); } } else { sent_button_longlick=0; } } if (((uptime-timeCheckedTemp)>PERIOD_READ_TEMP) || (timeCheckedTemp>uptime)) { // TEMP SENSOR 1 float current_temp=0; sensors.requestTemperatures(); current_temp=sensors.getTempCByIndex(0); if (current_temp>-100 && current_temp<50) { timeCheckedTemp=uptime; Serial.print("Temp sensor: "); Serial.println(current_temp); float diff=(float)sent_temperature-(float)current_temp; if ((abs(diff)>=TEMP_ACC) || ((uptime-timeSentTemp)>PERIOD_SEND_TEMP)) { // timeSentTemp=uptime; sent_temperature=(float)current_temp; Serial.print("P:"); Serial.print(random(65535)); Serial.print(";F:"); Serial.print("0"); Serial.print(";T:0;C:"); Serial.print("10"); Serial.print(";D:"); Serial.print((int)(current_temp*100)); Serial.println(";"); } } else { //Serial.print("Incorrect T: "); //Serial.println(current_temp); } } if (Serial.available()) { char c=Serial.read(); if (c == '\n' || c == ';') { Serial.println(inData); int commandProcessed=0; if (inData.equals("blink")) { Serial.println("BLINKING!"); blinking(3); commandProcessed=1; } if (inData.startsWith("pair")) { commandProcessed=1; inData.replace("pair",""); noolitePair(inData.toInt()); } if (inData.startsWith("on")) { commandProcessed=1; inData.replace("on",""); nooliteTurnOn(inData.toInt()); } if (inData.startsWith("off")) { commandProcessed=1; inData.replace("off",""); nooliteTurnOff(inData.toInt()); } if (inData.startsWith("switch")) { commandProcessed=1; inData.replace("switch",""); nooliteSwitch(inData.toInt()); } if (inData.startsWith("level")) { commandProcessed=1; inData.replace("level",""); int splitPosition; splitPosition=inData.indexOf('-'); if(splitPosition != -1) { String paramString=inData.substring(0,splitPosition); int channel=paramString.toInt(); inData=inData.substring(splitPosition+1,inData.length()); nooliteLevel(channel,inData.toInt()); } } if (inData.startsWith("unpair")) { commandProcessed=1; inData.replace("unpair",""); nooliteUnPair(inData.toInt()); } if (inData.startsWith("color-")) { commandProcessed=1; inData.replace("color-",""); if (inData.equalsIgnoreCase("r")) { setColor(255,0,0); } if (inData.equalsIgnoreCase("g")) { setColor(0,255,0); } if (inData.equalsIgnoreCase("b")) { setColor(0,0,255); } if (inData.equalsIgnoreCase("w")) { setColor(255,255,255); } if (inData.equalsIgnoreCase("off")) { setColor(0,0,0); } } if (commandProcessed==0) { Serial.print("Unknown command: "); Serial.println(inData); } inData=""; Serial.flush(); } else { inData += (c); } } if(ET.receiveData()) { digitalWrite(PIN_LED, HIGH); if (last_packet_id!=(int)mydata.packet_id) { Serial.print("P:"); Serial.print(mydata.packet_id); Serial.print(";F:"); Serial.print(mydata.device_id); Serial.print(";T:"); Serial.print(mydata.destination_id); Serial.print(";C:"); Serial.print(mydata.command); Serial.print(";D:"); Serial.print(mydata.data); Serial.println(";"); last_packet_id=(int)mydata.packet_id; } digitalWrite(PIN_LED, LOW); } if (mySerial.available()) Serial.write(mySerial.read()); }
周辺機器を使用したコントローラーの動作は、ホストモジュールに接続せずに確認できますが、ファームウェアを起動した後、ポートモニターを起動して、コンソールに表示される内容を確認してください。 ホストモジュールが受信するのはこのデータストリームであり、確立されたルールに従って応答できるのはホストモジュールのみです。
ホストモジュール(ルーター)の準備
OpenWRTシステムを搭載したルーターのファームウェアと、この記事のフレームワーク内でのその後の構成については触れません。これに関する情報は、Webで簡単に見つけることができます。 その結果、インターネットアクセスを備えたローカルWiFiネットワークのクライアントモードでルーターを使用し、接続されたマイクロコントローラーをCOMポートとして正しく識別する必要があります。
次のステップは、ルーターをホストモジュールに変換することです。 Bashインタープリターを使用して、ホストモジュールスクリプトを記述しました。 それは私にとって非常に便利で普遍的、つまり ホストモジュールプラットフォームを特定の「鉄」実装にバインドしません。OpenWRTを備えたルーターの代わりに、組み込みのLinuxを備えたデバイスを使用できます(マイクロコントローラーを接続するためのBashとドライバーのみが必要な場合)。
ホストモジュールの動作アルゴリズムは、次の点で表すことができます。
- 初期化-外部Webサービス(使用可能な場合)からこのデバイスの操作ルールをダウンロードし、マイクロコントローラーとの通信チャネルをセットアップします
- コントローラからデータを受信し、ロードされたルールに従って処理します
ソースコードレベルでは、次のようになります。
設定ファイル(/ect/master/settings.sh)
MASTER_ID="AAAA-BBBB-CCCC-DDDD" ARDUINO_PORT=/dev/ttyACM0 ARDUINO_PORT_SPEED=9600 UPDATES_URL="http://connect.smartliving.ru/rules/" DATA_PATH="/etc/master/data" WEB_PATH="/www" ONLINE_CHECK_HOST="8.8.8.8" LOCAL_BASE_URL="http://connect.dev"
メイン処理スクリプトファイル(/etc/master/cycle.sh)
#!/bin/bash # settings . /etc/master/settings.sh # STEP 0 # wait to be online COUNTER=0 while [ $COUNTER -lt 5 ]; do ping -c 1 $ONLINE_CHECK_HOST if [[ $? = 0 ]]; then echo Network available. break; else echo Network not available. Waiting... sleep 5 fi let COUNTER=COUNTER+1 done #--------------------------------------------------------------------------- # START if [ ! -d "$DATA_PATH" ]; then mkdir $DATA_PATH chmod 0666 $DATA_PATH fi while : do #--------------------------------------------------------------------------- # Downloading the latest rules from the web echo Getting rules from $UPDATES_URL?id=$MASTER_ID wget -O $DATA_PATH/rules_set.tmp $UPDATES_URL?id=$MASTER_ID if grep -Fq "Rules set" $DATA_PATH/rules_set.tmp then mv $DATA_PATH/rules_set.tmp $DATA_PATH/rules_set.sh else echo Incorrect rules file fi #--------------------------------------------------------------------------- # Reading all data and sending to the web ALL_DATA_FILE=$DATA_PATH/all_data.txt rm -f $ALL_DATA_FILE echo -n id=$MASTER_ID>>$ALL_DATA_FILE echo -n "&data=">>$ALL_DATA_FILE FILES=$DATA_PATH/*.dat for f in $FILES do #echo "Processing $f file..." OLD_DATA=`cat $f` fname=${f##*/} PARAM=${fname/.dat/} echo -n "$PARAM|$OLD_DATA;">>$ALL_DATA_FILE done ALL_DATA=`cat $ALL_DATA_FILE` echo Posting: $UPDATES_URL?$ALL_DATA wget -O $DATA_PATH/data_post.tmp $UPDATES_URL?$ALL_DATA rm -f $DATA_PATH/*.dat #--------------------------------------------------------------------------- # Downloading the latest menu from the web echo Getting menu from $UPDATES_URL/menu2.php?download=1\&id=$MASTER_ID wget -O $DATA_PATH/menu.tmp $UPDATES_URL/menu2.php?download=1\&id=$MASTER_ID if grep -Fq "stylesheet" $DATA_PATH/menu.tmp then mv $DATA_PATH/menu.tmp $WEB_PATH/menu.html else echo Incorrect menu file fi #--------------------------------------------------------------------------- START_TIME="$(date +%s)" # main cycle stty -F $ARDUINO_PORT ispeed $ARDUINO_PORT_SPEED ospeed $ARDUINO_PORT_SPEED cs8 ignbrk -brkint -imaxbel -opost -onlcr -isig -icanon -iexten -echo -echoe -echok -echoctl -echoke noflsh -ixon -crtscts #--------------------------------------------------------------------------- while read LINE; do echo $LINE PASSED_TIME="$(($(date +%s)-START_TIME))" # Processing incoming URLs from controller REGEX='^GET (.+)$' if [[ $LINE =~ $REGEX ]] then URL=$LOCAL_BASE_URL${BASH_REMATCH[1]} #-URL=$LOCAL_BASE_URL wget -O $DATA_PATH/http.tmp $URL echo Getting URL echo $URL fi PACKET_ID="" DATA_FROM="" DATA_TO="" DATA_COMMAND="" DATA_VALUE="" REGEX='^P:([0-9]+);F:([0-9]+);T:([0-9]+);C:([0-9]+);D:([0-9]+);$' if [[ $LINE =~ $REGEX ]] then PACKET_ID=${BASH_REMATCH[1]} DATA_FROM=${BASH_REMATCH[2]} DATA_TO=${BASH_REMATCH[3]} DATA_COMMAND=${BASH_REMATCH[4]} DATA_VALUE=${BASH_REMATCH[5]} DATA_FILE=$DATA_PATH/$DATA_FROM-$DATA_COMMAND.dat echo -n $DATA_VALUE>$DATA_FILE fi if [ -f $DATA_PATH/incoming_data.txt ]; then echo "New incoming data:"; echo `cat $DATA_PATH/incoming_data.txt` cat $DATA_PATH/incoming_data.txt>$ARDUINO_PORT rm -f $DATA_PATH/incoming_data.txt fi ACTION_RECEIVED="" if [ -f $DATA_PATH/incoming_action.txt ]; then ACTION_RECEIVED=`cat $DATA_PATH/incoming_action.txt` echo "New incoming action: $ACTION_RECEIVED" rm -f $DATA_PATH/incoming_action.txt fi . $DATA_PATH/rules_set.sh if [ -f $DATA_PATH/reboot ]; then echo "REBOOT FLAG" rm -f $DATA_PATH/reboot break; fi done < $ARDUINO_PORT done #--------------------------------------------------------------------------- echo Cycle stopped.
設定では、デバイスに一意の識別子(MASTER_ID)があることがわかります。これは、Webサービスとのやり取りに使用されます(永続的な接続は必要ないことを思い出します)。
メインスクリプトの作業中、ディレクトリ/ etc / master / data /を使用して、ロードされたルールコード、最新のセンサー測定値の保存、およびルールシステムの一部の構成(タイマーなど)の作業を行います。
このリンクからファイルの完全なセットをダウンロードできます。
ルールシステム
ルールシステムの概要は上記のとおりですので、ここでもう少し詳しく説明します。 実際、各ルールはbash命令のセットです。 このセットの最初の部分であるActivatorを呼び出して、受信データがこのルールに準拠しているかどうかを確認し、2番目の部分(Contractor)でいくつかのアクションを直接実行します。
ルールをアクティブにするための可能な条件:
- マイクロコントローラーから特定の形式の文字列を取得する
- 内部(ボタン、モーション、温度)または外部(ワイヤレス)センサーから特定の形式のコマンドを受信する
- APIまたは別のルールによる「手動」アクティベーション(スクリプトの実行)
可能なアクション:
- 変数値を設定する
- センサーコントローラーへの行/コマンドの送信(内部処理または外部デバイス用)
- 外部WebシステムへのHTTPリクエスト
- シェルコマンドの実行(Linux)
- スクリプト実行
- 遅延タイマーアクション
ルールソースコードの例
# RULE 2 Forwarder RCSwitch (regex) MATCHED_RULE2='0' REGEX='^RCSwitch:(.+)$' if [[ $LINE =~ $REGEX ]] then MATCHED_RULE2="1" fi # RULE 2 ACTIONS if [[ "$MATCHED_RULE2" == "1" ]] then #Action 2.1 (http) echo "HTTP request: http://192.168.0.17/objects/?script=RCSwitch&rcswitch=${BASH_REMATCH[1]}" wget -O $DATA_PATH/http.tmp http://192.168.0.17/objects/?script=RCSwitch\&rcswitch=${BASH_REMATCH[1]} fi
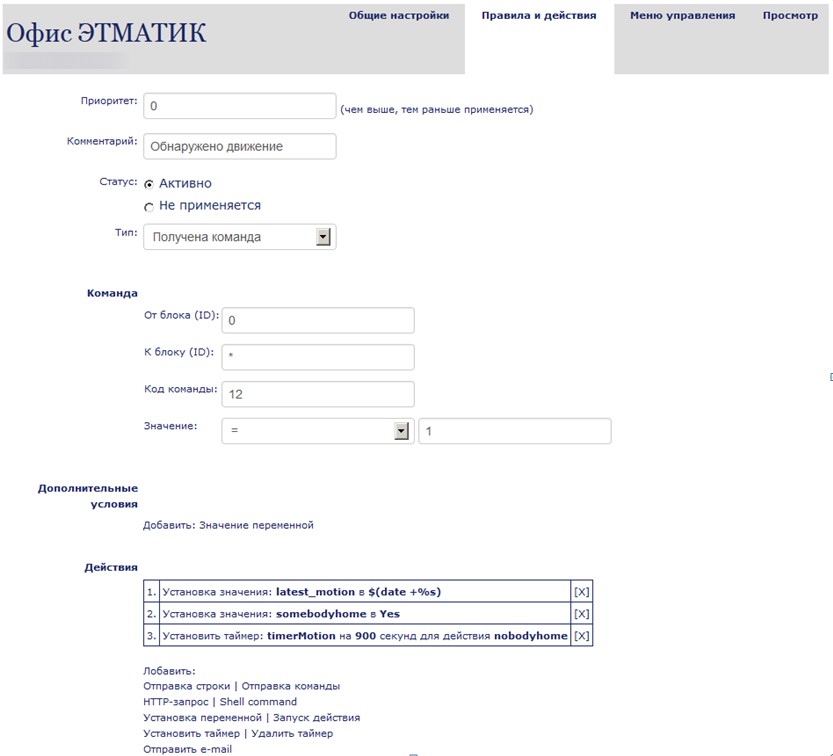
デバイスをWebシステムに登録した後、ユーザーの個人アカウントを介してルールが構成されます(現在、サーバーコンポーネント全体がconnect.smartliving.ruプロジェクトの一部として実装されています)。 この場合、プログラミングする必要はありません。Webシステム自体がユーザー定義のルールをbashコマンドに変換します。 ユーザー側では、構成インターフェイスは次のようになります。
インターフェースとAPI
原則として、上記は自律モジュールを作成するのに十分ですが、ウィッシュリストは長く、実装への道もありました。 次のステップは、WebインターフェースとAPIを作成することでした。 この手順は、前の手順と比較してそれほど複雑ではなく、同様の原則に従って実装されました。 ホストデバイスには既にWebサーバーが存在するため、APIを実装するために別のbashスクリプトが作成され、/ www / cgi-bin / masterに配置されます。
スクリプトソースコード/ www / cgi-bin / master
#!/bin/bash DATA_PATH="/etc/master/data" echo "Content-type: text/plain" echo "" # Save the old internal field separator. OIFS="$IFS" # Set the field separator to & and parse the QUERY_STRING at the ampersand. IFS="${IFS}&" set $QUERY_STRING Args="$*" IFS="$OIFS" # Next parse the individual "name=value" tokens. ARG_VALUE="" ARG_VAR="" ARG_OP="" ARG_LINE="" for i in $Args ;do # Set the field separator to = IFS="${OIFS}=" set $i IFS="${OIFS}" case $1 in # Don't allow "/" changed to " ". Prevent hacker problems. var) ARG_VAR="`echo -n $2 | sed 's|[\]||g' | sed 's|%20| |g'`" ;; # value) ARG_VALUE=$2 ;; line) ARG_LINE=$2 ;; op) ARG_OP=$2 ;; *) echo "<hr>Warning:"\ "<br>Unrecognized variable \'$1\' passed.<hr>" ;; esac done # Set value #ARG_OP="set" #echo $ARG_OP if [[ "$ARG_OP" == "set" ]] then # echo "Set operation<br>" echo -n "$ARG_VALUE">$DATA_PATH/$ARG_VAR.dat echo "OK" fi if [[ "$ARG_OP" == "get" ]] then # echo "Get operation<br>" cat $DATA_PATH/$ARG_VAR.dat fi if [[ "$ARG_OP" == "send" ]] then # echo "Send<br>" echo -n $ARG_LINE>>$DATA_PATH/incoming_data.txt echo "OK" fi if [[ "$ARG_OP" == "action" ]] then # echo "Action<br>" echo -n $ARG_LINE>>$DATA_PATH/incoming_action.txt echo "OK" fi if [[ "$ARG_OP" == "refresh" ]] then # echo "Send<br>" echo "Web">$DATA_PATH/reboot echo "OK" fi if [[ "$ARG_OP" == "run" ]] then # echo "Run<br>" echo `$ARG_LINE` fi
このスクリプトは、次のAPIコマンドを提供します。
変数値を設定する
_/cgi-bin/master?op=set&var=Variable1&value=Value1
Variable1の値をValue1に設定します
変数の値を取得する
_/cgi-bin/master?op=get&var=Variable1
Variable1の値を返します
コントローラーへのデータ送信
_/cgi-bin/master?op=send&line=SomeData
接続されたコントローラーにSomeData文字列を送信します
アクションのアクティベーション
_/cgi-bin/master?op=action&line=SomeAction
ルールに記述されているSomeActionアクションを初期化します(タイプ「アクティブアクション」)
ルールの強制更新
_/cgi-bin/master?op=refresh
デバイスを再起動せずに、ルールとWebインターフェイスの強制更新(ダウンロード)を初期化します
システムチーム
_/cgi-bin/master?op=run&line=SomeCommand
システムシェルでSomeCommandの実行を初期化します(たとえば、「reboot」を使用するとデバイスが再起動されます)
APIがWebインターフェースになった後。 彼はルールと同じように扱われました。Webサービスで設定し、同じ初期化段階でデバイスで更新しました。 デバイスのコントロールメニューを作成するためのインターフェイスは次のとおりです。
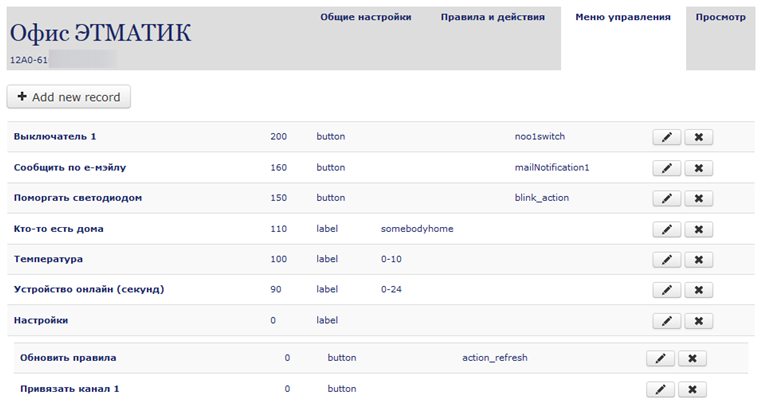
車輪を再発明しないために、軽量のKrakenフロントエンドフレームワークが採用され、/ www / kraken-masterフォルダーにドロップされました。 初期化後、menu.htmlファイルが/ www /フォルダーに表示され、それに応じて、構成済みのWebインターフェースにアクセスできます。
_/menu.html
_/menu.html
このタイプのアドレスは偶然に選ばれたわけではありませんが、MajorDroidモバイルアプリケーション(Androidプラットフォーム用)との互換性のために少し詳しく説明していますが、私はあらゆるものの普遍性と互換性のためです。
オンラインワーク
「ええと、システムが判明しましたが、それだけではありませんか?」-あなたは尋ねます。 まあ、ほとんど、ほんの少しだけ残った。 より正確には、ユーザーにとっては「小さな」ものですが、開発者にとっては大きな舞台です(よくあることです)。 すなわち-インターネット経由でデバイスを操作します。 Webインターフェースがあり、ルーターのポートを転送して、健康を楽しんでいるように見えます。 しかし、これらは私たちの方法ではなく、私たちの方法は他者の生活を単純化することにあります(そして私たち自身を複雑にします)。 最悪の場合-ルータの設定を変更して転送ポートを作成する方法はありません。 または、同じネットワーク上で多くの同様のデバイスを使用し、それぞれが(仮に)外部からアクセスできるようにしたいと考えられています。 解決策は次のとおりです。デバイス自体は、データとコマンドを交換するために外部サーバーとのチャネルを開始および維持する必要がありますが、外部サーバーは特定のデバイスに指定されたWebインターフェイスを複製し、このチャネルを介したユーザーからのコマンドの転送を編成しました。 チャネルはソケット接続であり、一方で(デバイス上で)別のbashスクリプトを作成し、他方で(サーバー上で)ソケットサーバーを作成します。
デバイスでは、スクリプトは/ etc / master / socket_clientにあります
スクリプトソースコード/ etc / master / socket_client
#!/bin/bash # settings . /etc/master/settings.sh # STEP 0 # wait to be online COUNTER=0 while [ $COUNTER -lt 5 ]; do ping -c 1 $ONLINE_CHECK_HOST if [[ $? = 0 ]]; then echo Network available. break; else echo Network not available. Waiting... sleep 5 fi let COUNTER=COUNTER+1 done #--------------------------------------------------------------------------- # START if [ ! -d "$DATA_PATH" ]; then mkdir $DATA_PATH chmod 0666 $DATA_PATH fi while : do TEST_FILE=$DATA_PATH/data_sent.txt touch $TEST_FILE SOCKET_HOST=connect.smartliving.ru SOCKET_PORT=11444 exec 3<>/dev/tcp/$SOCKET_HOST/$SOCKET_PORT NOW=$(date +"%H:%M:%S") echo -n $NOW echo " Sending: Hello!" echo "Hello!">&3 read -t 60 ok <&3 NOW=$(date +"%H:%M:%S") echo -n $NOW echo -n " Received: " echo "$ok"; REGEX='^Please' if [[ ! $ok =~ $REGEX ]] then NOW=$(date +"%H:%M:%S") echo -n $NOW echo " Connection failed!" continue fi NOW=$(date +"%H:%M:%S") echo -n $NOW echo " Sending: auth:$MASTER_ID" echo "auth:$MASTER_ID">&3 read -t 60 ok <&3 NOW=$(date +"%H:%M:%S") echo -n $NOW echo -n " Received: " echo "$ok"; REGEX='^Authorized' if [[ ! $ok =~ $REGEX ]] then NOW=$(date +"%H:%M:%S") echo -n $NOW echo " Authorization failed!" exit 0 fi NOW=$(date +"%H:%M:%S") echo -n $NOW echo " Sending: Hello again!" echo "Hello again!">&3 read -t 60 ok <&3 NOW=$(date +"%H:%M:%S") echo -n $NOW echo -n " Received: " echo "$ok"; while read -t 120 LINE; do NOW=$(date +"%H:%M:%S") echo -n $NOW echo -n " Got line: " echo $LINE # Ping reply REGEX='^PING' if [[ $LINE =~ $REGEX ]] then echo -n $NOW echo " Sending: PONG!" echo PONG!>&3 fi # Run action REGEX='^ACTION:(.+)$' if [[ $LINE =~ $REGEX ]] then DATA_RECEIVED=${BASH_REMATCH[1]} NOW=$(date +"%H:%M:%S") echo -n $NOW echo -n " Action received: " echo $DATA_RECEIVED echo -n $DATA_RECEIVED>>$DATA_PATH/incoming_action.txt fi # Pass data REGEX='^DATA:(.+)$' if [[ $LINE =~ $REGEX ]] then DATA_RECEIVED=${BASH_REMATCH[1]} echo -n $NOW echo -n " Data received: " echo $DATA_RECEIVED echo -n $DATA_RECEIVED>>$DATA_PATH/incoming_data.txt fi # Pass data REGEX='^URL:(.+)$' if [[ $LINE =~ $REGEX ]] then DATA_RECEIVED=${BASH_REMATCH[1]} echo -n $NOW echo -n " URL received: " echo wget -O $DATA_PATH/data_post.tmp http://localhost$DATA_RECEIVED fi # Check files modified FILES=$DATA_PATH/*.dat for f in $FILES do if [ $f -nt $TEST_FILE ]; then echo "Processing $f ..." FNAME=${f##*/} PARAM=${FNAME/.dat/} CONTENT=`cat $f` echo -n $NOW echo " Sending: DATA:$PARAM|$CONTENT;" echo "data:$PARAM|$CONTENT;">&3 fi done touch $TEST_FILE done <&3 done #--------------------------------------------------------------------------- echo Cycle stopped.
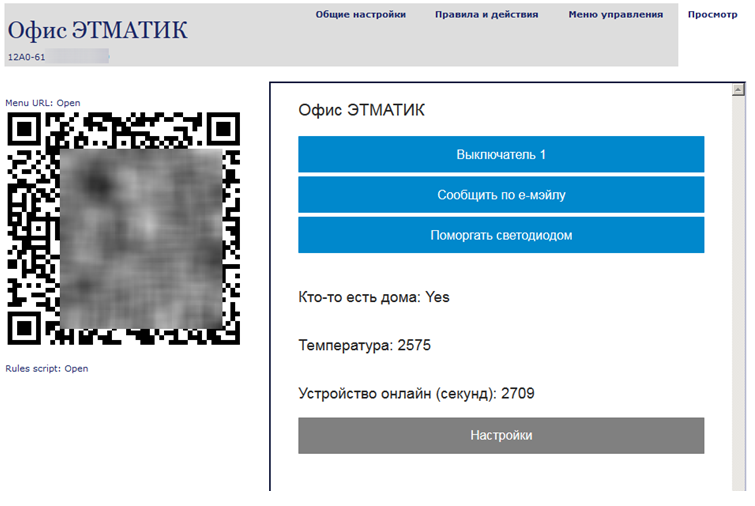
デバイスを操作するためのリンクとQRコードは、ユーザーがアカウントから利用できます。 以下の1つのテストケース:
今後の課題
説明された構造全体は非常に安定して動作します。おそらく、発売から数か月が経過し、記事を書くことに決めた時期であり、デバイスはその中に定められた機能を正しく実行しました。 しかし、彼らが言うように、すべてがフリルなしで実装されています。 概念を検証するにはこれで十分ですが、この(または同様の)プラットフォームでデバイスを大量に導入するには、次の領域で作業します。
- セキュリティ(暗号化、インターフェイスにアクセスするためのパスワードなど)
- サーバー側のパフォーマンス(これまでのところ問題はありませんでしたが、自家製ソケットサーバーは最適な実装オプションからはほど遠いです)
- UI / UX(デバイスと個人アカウントの両方)
- アイロン(「Arduino?ルーター!?お願いします...」)
おわりに
この記事では、すべての構成の詳細と自動実行スクリプト設定などのいくつかのことについては説明していません。主な機能と概念の本質を伝えるために、意図的に省略しました。
特に、このデバイスとその作成プロセス全体は、個々のコンポーネントとテクノロジーの動作をテストするための実験でした。 その過程でアイデアが生まれ、他のデバイスやシステムに具現化され、何かが外部からこのプロジェクトに移行したため、一般的に時間はゼロからかけ離れていました。 実装の経験が役に立てば幸いです。
コンセプトの商用アプリケーションのトピックを開発する場合、あまり一般的ではないが、むしろ適用された実装について話すことができます。 例:
- 自宅警備員-誰かが家に帰ったことと室温を所有者に通知します
- 照明コントローラー-スケジュール/イベント照明制御
- 気候制御-外部の温度/湿度センサーからの情報の受信とアクチュエーターの制御
- 健康管理-「アラーム」ボタンを押したとき、または長時間動かないときに通知を送信する
したがって、同じベースを使用して、多くの適用された「ボックス化」ソリューションを作成し、同様の「インターネットのモノ」をより高いレベルの情報システムに統合できます。
PS結果のデバイスの「ライブ」写真をアップロードするかどうか長い間考えていましたが、事業全体の実験的な性質についてすでに警告していたので、段ボールケース(または必要に応じてそのレイアウト)は非常に一貫しています:

PPS私はほとんど忘れていました、リストされたコンポーネントのすべてを備えたこのデバイスのコストは約60ドルになり、費やされた時間は貴重です。