
これらの人は百万を獲得しました
彼らのロボットは6:45に迷路を通過しました。 これはたくさんありますが、無人機はフィニッシュマーカーにいくつかのアプローチをしました(最後に着陸する必要があった発射マーカーを取得しました)。
私たちのロボットは4:01で競争から飛び出しました。 これが彼のgithubコードです。
今回はまだ賞品を請求することはできませんが、あなたと遊んでいます。 新しいステージのタスクは、6:15分より速く飛行することです。その間に、更新されたトレーニンググラウンド(正確に以下に更新した程度)を飛行し、最終的に20万ルーブルを取ります。
過去への小さな余談
- コンテストの最終結果、写真、ビデオ、エラー、結果を報告します。
- 最後の競技にロボットを準備した方法
- 受賞者の報告とロボットの目からのスクリーンショット。
そして今、本当の競争について
基準時間をどのようにしたかについてのビデオ 。これは、競争の新しい段階で打ち負かされる必要があります。
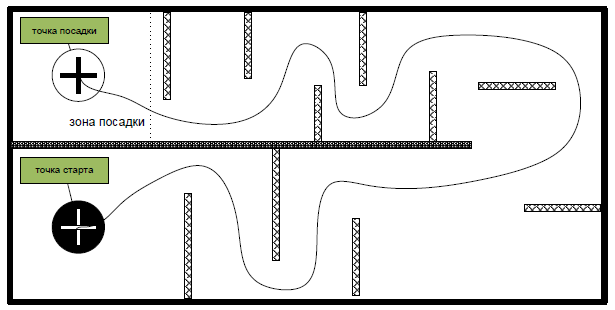
競争の最終段階のポリゴンダイアグラム 2つの障害がありました。

今年、埋め立て地は同じまま-37.4 x 8.8メートルでしたが、より多くの障害物がありました-それらの間の最低1.8メートルのクリアランス:
正確に何が変わったのですか?
- 賞金プールには100万人が残っています。 しかし、今では5つの賞があり、それぞれ-20万ルーブルです。
- 昨年のような決勝戦はありません。 飛行を許可された各チームは、試行日を決定し、主催者と調整します。「勝つためには、私たちよりも速く迷路を飛ぶ必要があります。」 6分15秒で完了しました。 このタスクを完了した最初の5人の参加者が勝ちます。 だからあなたの試みで遅れないでください。
- 埋め立て地にはより多くのパーティションがあります-現在、10の障害があります。 それらの位置は、図に示されているものに非常に近いです。
- 2つではなく、3つの信頼できる試みがあります。
埋め立て地について知っておくべきことは何ですか?
彼は同じです。 壁のカバーは前回のファイナルと同じです-ポリマー、カラーRAL 5024(一部の場所では冬の後にチップとぼろぼろがあります)。 光のレベルは天候に左右され、対照的なマーカー(黒地に白、白地に黒)があります。 パーティションは半透明で縁石で固定されています。 以前は、ポリゴンはポリエチレンのメッシュで覆われていましたが、現在は単なるメッシュです。 したがって、参加者は雨風から免れないことを考慮する必要があります。 私たちは、雨が降る小雪の状態で基準飛行を行ったため、センサーの動作に干渉が生じました。 そのため、テストにサインアップするか、競合する課題を完了する前に、天気予報を参照してください。 テストについては、実際のトレーニンググラウンドで丸2日ありますが、最近のトレーニンググラウンドで唯一のチームではない可能性があることに注意してください。 しかし、昨年の夏は誰も気にしませんでした。
特徴
- ロボットは自律型でなければなりません。 コンピューターは機内または地上局に設置されている場合があります。 制御に無線チャネルを使用する場合、空気のノイズについて覚えておいてください。昨年、多くの参加者にとって困難が生じました。
- 昨年水たまりがありました-それらはカメラの認識またはナビゲーションのタスクで問題になる可能性があります。
- 屋内でロボットをデバッグしている場合は、埋め立て地に風があることを忘れないでください。
- ほとんどの場合、建物の鉄筋コンクリート構造のため、磁力計でナビゲートできません。
- LIDARを使用する場合は、路上での晴天時には、部屋とは異なる動作をする可能性があることを考慮してください。範囲を縮小でき、特定のセクターが一般に測定から外れる可能性があります。 ご覧ください。
- 必須のネジ保護。 さらに、緊急シャットダウンリモートが必要です。これは、試行中に裁判官の手に渡ります。
- カスタムフライングプラットフォームとArDroneなどの既製のものの両方を使用できます。 これは、デザイナーだけでなくソフトウェア開発者にとっても競争であるため、タスクのロジックの実装を除いて、すべてがすぐに使用できる場合は、これも考慮されます。
- ロボットを大きくしすぎないでください。 障害物間の通路の最小幅は1 m 80 cmです。
- 上からの飛行高度は、床から2.7〜3メートルの高さにあるグリッドによって制限されます。 床はほとんど平らですが、ケーブルや留め具の保護ネットなど、高さ10〜15 cmまでの突起がある場所を考慮する必要があります。 フライトのビデオを見ると、それらを見ることができます。
- ナビゲーション。 GPS、LIDAR、カメラ超音波、ビーコン三角測量など。 追加の地上ベースのナビゲーション機器を使用する場合は、フライトゾーン内に設置できないことに注意してください。
- 電圧(48 V)、無線周波数、エミッターの出力などに制限があります-すべて当社の基準と基準に準拠しています。
コンテストの技術的特徴の詳細については、ルールをご覧ください。 それらへのリンクは、トピックの最後にあります。
私達について
同じプラットフォームで同じドローン(Mikrokopter LX)で参照時間を打つことを示しました。 今回は、ドローンのすべての要素を複合材料で作られた新しいフレームに配置しました。 同時に、すべての制御アルゴリズムとナビゲーションアルゴリズムは変更せず、より正確に飛行するために、新しいポリゴンの条件と新しいフレームのパラメーターのみを再構成しました。
当社のセンサー:
- 高さを決定するためのソナー
- 着陸マーク認識カメラ
- ダイナミックマップを作成し、ロボットを宇宙にローカライズするためのLidar。
- IMU Mikrokopterから角度と角速度に関するデータを取得します
- コンピューターはIntel NUC i3に基づいています。 OS-Ubuntu 12.04。 使用されるライブラリ:OpenCVおよびROS。 フライトをシミュレートするために、シミュレーターGazeboを使用しました。


最後の大会の参加者について
以前の大会の参加者のなかには、わずかな改善でうまくいくことができ、1、2週間で新しいステージに備えることができるように思えます。 ほとんどのチームは、特定のポリゴンスキームに対する決定を鋭くしているため、障害物を追加すると、すべてのカードと混乱します。 多くの改造とテストが必要になります。
タイムライン
- 10月1日まで-申請の受理。 すでに4月1日から営業しています。 アプリケーションの要件は非常に厳しいです。 実際、アプリケーションでは、トレーニンググラウンドで既に何かを表示できることを示す必要があります。
- 申請書を提出した後、テストの日とテストの試行について主催者に同意することが可能になります。
- 10月15日-テスト試行の期限。 しかし、前述したように、10月15日までに5人の参加者が指定された時間より早く飛行した場合、競技は早く終了する可能性があります。
参照:
- もう一度、 ロボットのコード 。 使用したツールとライブラリを確認できるという点で興味深いです。 おそらく彼はあなた自身のソリューションの開発を手伝ってくれるでしょう。
- ルール
- こちらのアプリケーション-robots@croc.ru 。 アプリケーションに必要なものについては、 こちらをご覧ください 。
謝辞: モスクワ航空研究所 (戦略的パートナー)、 パイロットストア、技術博物館 (技術パートナー)。