
過去数年間、私はメインの仕事からの空き時間に、ホームオートメーション、環境パラメーターの制御と監視のためのさまざまなデバイスの設計と実際の製造に携わってきました。 今、私には多くの自由時間があり、何が行われたかを説明する機会を得ました。
私のデバイスは、Wi-Fiを介してホームネットワークに接続されています。Wi-Fiは、ホームネットワークに常駐するソリッドステートドライブを備えたサイレントファンレス制御マシンです。 このマシンは、システムのカーネルの機能を実行し、さまざまなセンサーからデータを収集するプログラムを実行し、外部デバイスの制御プログラムを実行します。
放射計で解決したかった問題は、次のように定式化されました。「一般的な意味で放射線を測定するデバイスが必要です。」 デバイスは、自然放射線バックグラウンドのレベルを示し、このバックグラウンドの変化に対応し、適用されるセンサー以上の測定限界を持ち、外部レコーダーにデータを転送できる必要があります。 また、デバイスに検索機能があると便利です。「ホットスポット」の近くにデバイスを移動し、組み込みインジケーターの測定値を変更してデバイスを見つけることができる場合。 また、例えば、コテージを歩き回り、すべてが正常であるかどうかを確認するなど、栄養の自律性をしばらく保持するのもいいでしょう。
決定する必要がある最初の質問は、使用するセンサーです。 放射能の測定に関する資料を研究することで、私の仕事に最適なセンサーは通常のガイガーミュラーセンサーであるという理解を得ました。 これらのデバイスを「ガイガー・ミュラーカウンター」と呼ぶのが伝統的ですが、実際には何もカウントしませんが、測定室で雪崩破壊のプロセスを開始することができた各粒子にインパルスを与えます。 したがって、「センサー」という用語を使用します。 さまざまな目的のために、それらの多くがあります。 私は自分のデバイスがガンマだけでなくベータ放射線に対して十分に敏感であることを望んでいました。 広く普及した安価な(200〜1000 rの範囲)SBM20は、ベータ線の影響を受けず、ベータ粒子を透過する窓がありません。 SBM20は主にガンマ線と十分に強力な放射線に敏感です。 理由は明らかです-それらは軍事目的のために作られました。 放射計でこのようなセンサーを使用するには、自然な背景をある程度適切に測定するために、データを長期間蓄積する必要があります。 SBM20の場合、この時間は通常46秒かかりますが、蓄積されたパルスの数は1時間あたりのマイクロレントゲンでのガンマバックグラウンドの現在の値に等しくなります。 しかし、ベータ線への感度を高めたかった。 私は大変動に頼らなかった;私は小さな値の毎日の測定に興味があった。 大変動の準備をしたい場合は、ストレージからDP5Vの種類を検索して購入し、その中の3つのコンデンサを良いフィルムのものに交換して、極端な時間あたり200 X線までの放射線を測定するのに適した緑色の箱に軍用のデバイスを入れます条件。
また、たとえばシンチレーション結晶やPMTに基づいて、荷電粒子を記録する他の方法があることに注意してください。 これらの測定方法を使用すると、放射束のパワースペクトルの分布を測定できますが、私の目的では冗長で非常に高価です。
そのため、ベータ版の感度を備えたGeiger-Mullerカウンターが必要です。 幸いなことに、これらのセンサーはロシアで製造されています。 ベータセンサーを選択しました。 NPF Consensusによって作成されます。 工場の従業員の非常に親切で顧客の態度は、まさにそのようなセンサーを購入する決定に一定の役割を果たしました。 私は愚かなダミーで彼らを苦しめ、彼らに非常に適切な答えを得ました。 センサーを購入するには、Zaprudnyaに行かなければなりませんでした。 これは、ドミトロフカに沿って約100 kmで、ほぼドブナに達します。 新しい場所を見たいという欲求も、旅行を決める際に役割を果たしました:)
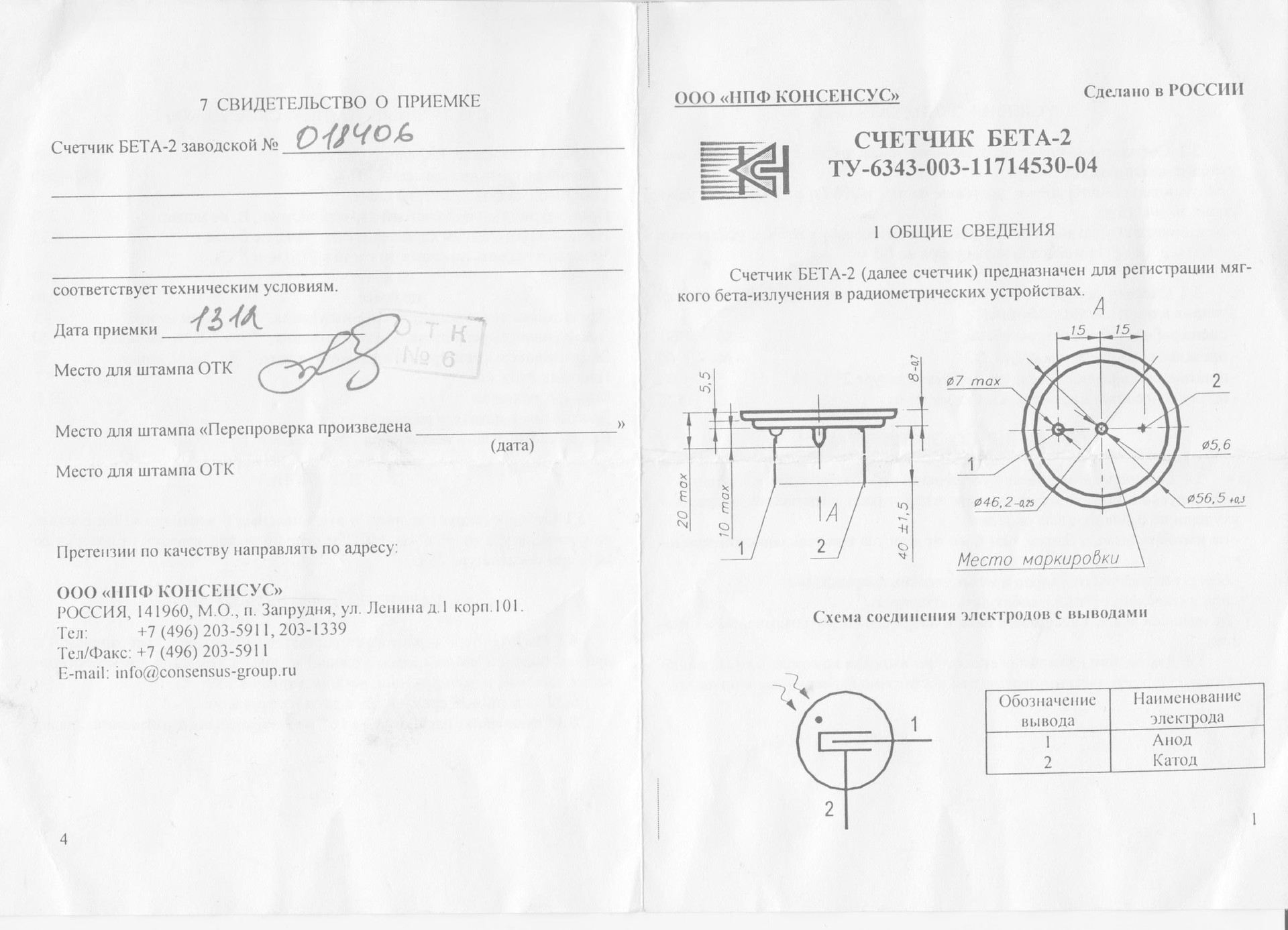
私が選択したBETA-2センサーは、13.8 cm2の雲母窓を持ち、ベータ放射線に敏感です。
動作するには、400vが必要です。 重要なセンサーパラメーターは回復時間です。 センサーの本質は、荷電粒子の通過中のチャンバー内のガスイオン化とそれに続く雪崩破壊であり、その後、ガス中の添加物が作用して放電を停止します。 消光後、センサーが感度を回復するのに時間がかかります。 この時間(「デッドタイム」という用語)は仕様に示されており、Beta-2の場合、具体的には少なくとも140マイクロ秒です。 周波数への再計算により、8 kHzの領域でセンサーからのパルスの最大周波数が得られます。
パスポートスキャン:
Geiger-Mullerカウンターからデータを収集するには、2つの方法があります。 最初に、10メガオームの領域の抵抗をアノードと直列に配置し、ピコファラッドの容量と約500ボルトの動作電圧を持つコンデンサを介して負のパルスをレジストレーション回路に印加します。 このパルスは、CMOSチップ入力の直接制御に適しています。
2つ目-抵抗がカソード回路に配置され、正のパルスが生成され、トランジスタのベースに印加されます。 これを含めると、高電圧コンデンサは不要です。
メーカーが推奨する標準的な方法は、アノードから信号を除去することです。 NPFコンセンサスの専門家は、そのような包含が正しい理由に答えることができませんでした。 PN400電力変換器の作者から後で回答を受け取りました。彼は、大きなカソードがアノードを取り囲み、アノードのスクリーンとして機能し、これを含めることで干渉と誤検知の数を減らすと考えています。
放射計の概略図

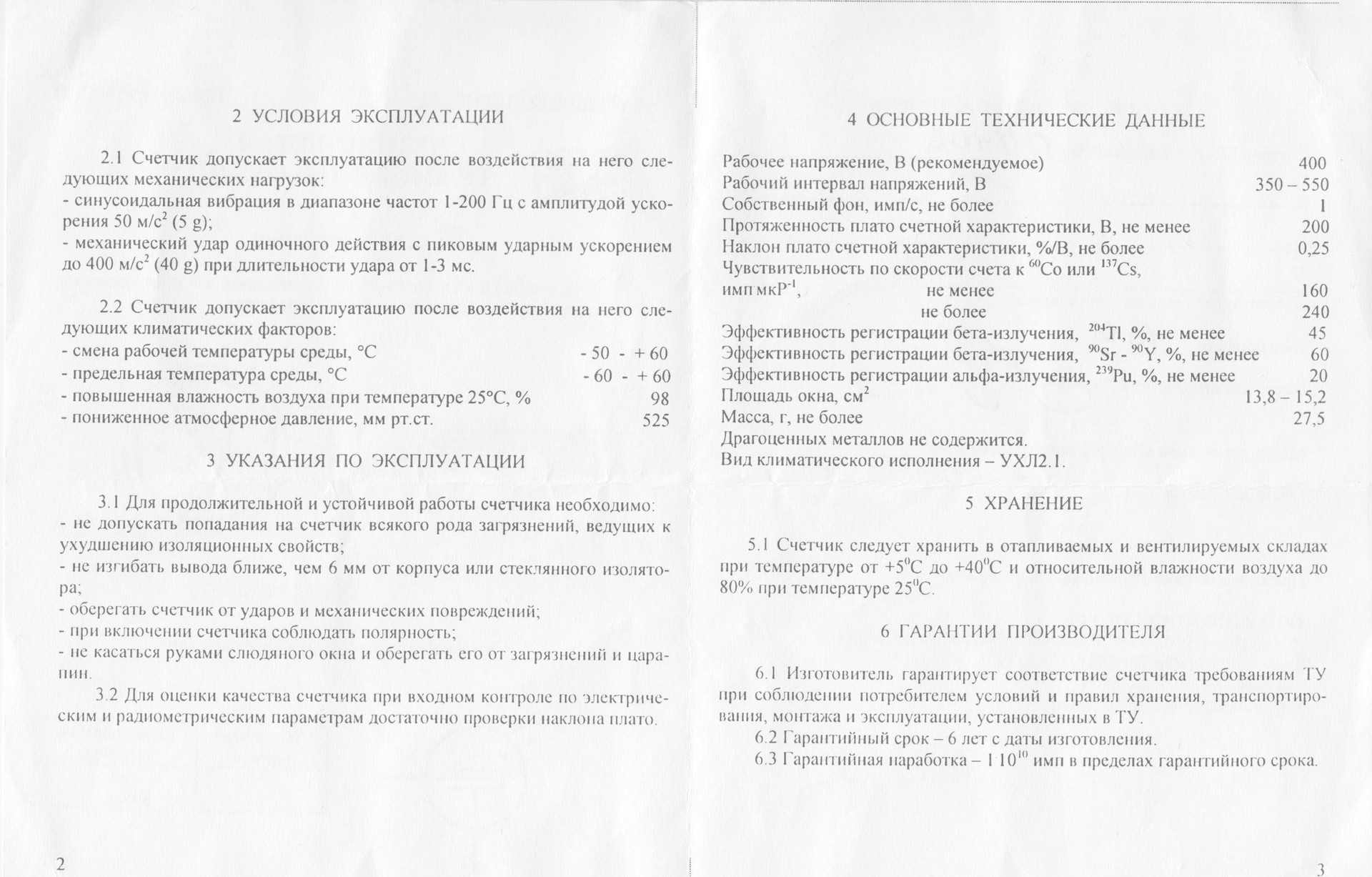
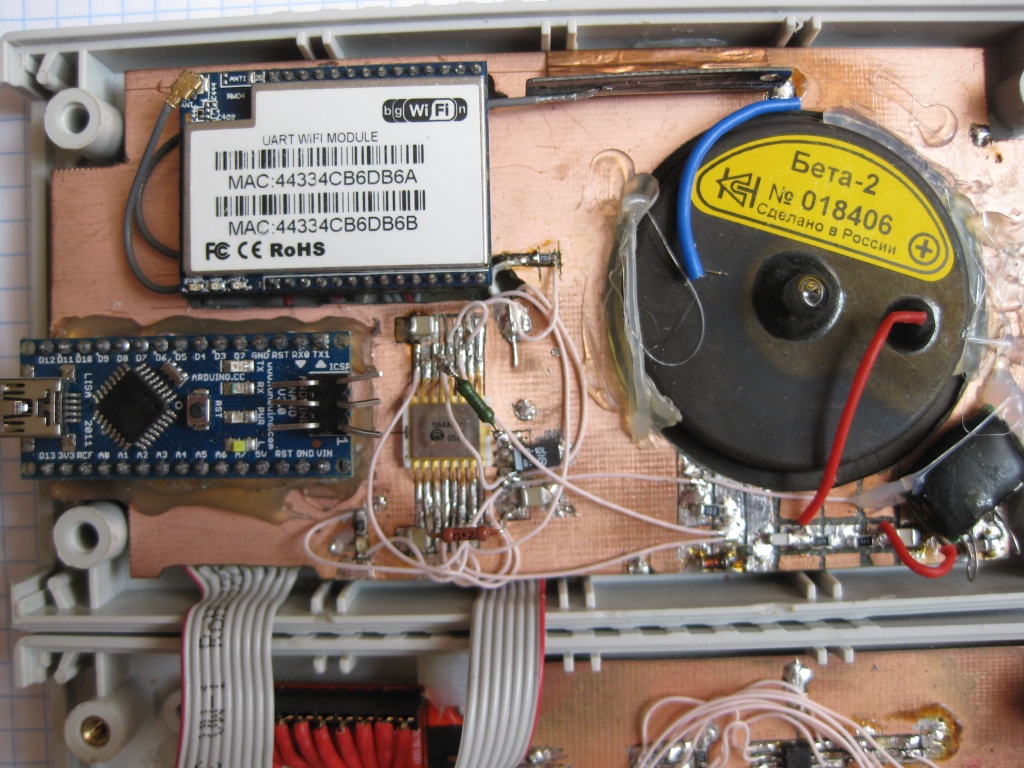
建設写真:

形成保護回路を介したセンサーからの信号は、マイクロプロセッサー入力に直接供給することができます。 しかし、デュアル564AG1シングルバイブレーターに追加の形成要素を配置することにしました。 最初のワンショットは、持続時間が50μsのパルスを生成し、2番目のワンショットはLEDに供給するための2.5ミリ秒です。 LEDは動作のインジケータとして機能し、ダイオードの点滅の強さでホットスポットを検索できます。 最初は、ベータ版とガンマ版の2つのカウンターを配置する必要がありました。 そのため、2チャネルタイマーが使用され、インジケータSMD LED HL2がシングルショットの最初のチャネルの出力に配置されました。
最初のチャネルを立ち上げた後、ベータ2は自然な背景に完全に応答することを確信しました(1)、2番目のセンサーのコストはまだ高い(2)、ナビゲーションセンサーをインストールしたかった(3)。 これら3つの理由のうち、2番目のガンマセンサーを設置するのではなく、ナビゲーションセンサーを設置するという計画を変更する決定が下されました。
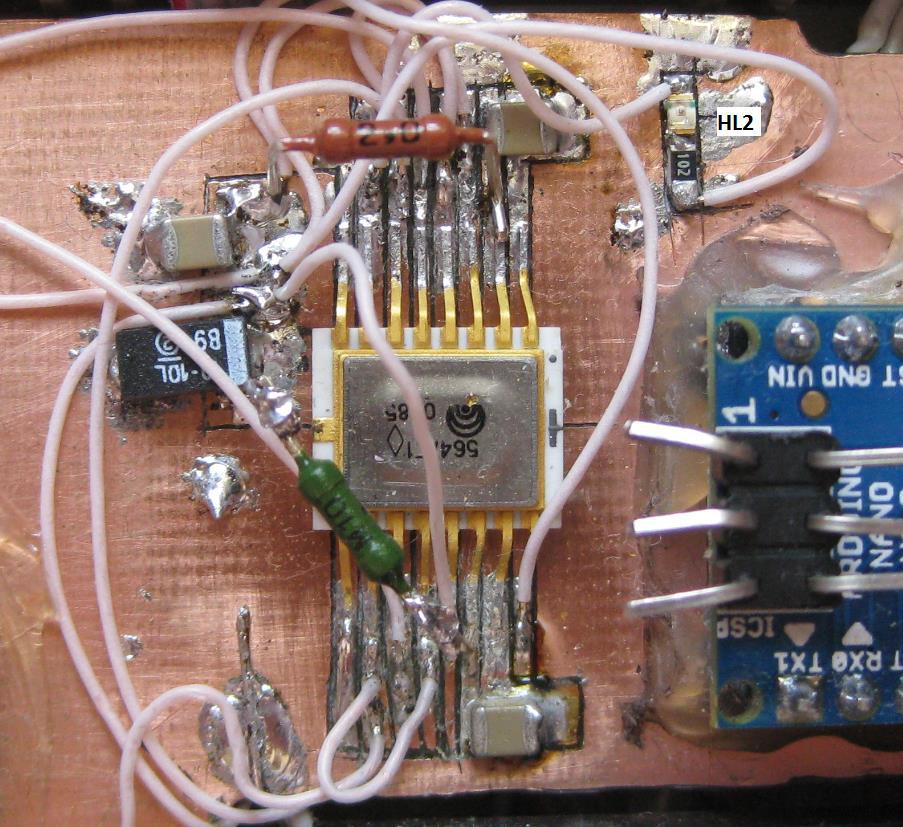
したがって、SMD LEDはそのままで、2番目のチャネルAG1のタイミング回路が変更され(抵抗が2 kから100 kに増加)、2番目のチャネルの出力はフロントパネルの大きな明るい赤のマットLEDに出力されました。 持続時間が50μsのパルスがはっきりと見えますが、2.5 msのパルスは完全に見えます。
このハードウェアソリューションは、Arduino Nanoに障害が発生した場合でも機能し、LEDが点滅する頻度によって状況をナビゲートできます。
デバイスの主な用途はバックグラウンドアクティビティの測定であるため、音を伴奏しませんでした。
放射計のプロセッサとして、Arduino Nanoを選択しました。 この選択の理由は、価格(中国から200ルーブル)、小型、既製のソリューションの膨大な数、および自家製製品でそのようなボードを使用することですでに得られた経験です。 主な質問は-パルスを互いに迅速に処理するのに十分なプロセッサ速度がありますか? このようなデバイスの研究とプログラムの説明から、カウンタからプロセッサの入力へのパルスの供給と割り込みのソフトウェアテストには、高速のプロセッサ速度と深刻なプログラミング作業が必要であることが明らかになりました。 ただし、幸いなことに、使用するプロセッサには3つのタイマーカウンタがあり、そのうち2つは外部プロセッサフットから外部パルスカウントモードに含めることができます。 これにより、タスクが大幅に簡素化されます。 測定サイクルの開始時にカウンタをリセットし、終了時にパルス数を読み取るだけで十分です。 アカウントは、プロセッサの注意を必要とせずに、ハードウェアレベルで実行されます。 プロセッサリソースを使用して、データを交換し、デバイス画面をレンダリングできます。
特定の時間の累積パルス数をカウントするアルゴリズムは、カウンターの銘板特性に基づいています。
60 Co imp /μRに対する感度:160÷240
つまり 1時間あたりのマイクロレントゲンを計算するには、パルス数、時間間隔、カウンターの感度を知る必要があります。 感度200の計算式は次のとおりです。
R = CT / DELTA_T * 18
CTはDELTA_T間隔ごとのパルス数(秒単位)、Rは現在の放射値(マイクロレントゲン/時間単位)です。
希望する人は自分で式を導き出すことができます、それはまったく難しいことではありません:)
放射能測定は、定常的なランダムプロセスのパラメーターの測定です。 ランダムプロセスは、期待値と標準偏差によって特徴付けられ、標準偏差が小さいほど、ランダムプロセスのパラメーターをより正確に測定しました。 パルス数が増えると、RMSDは定常値まで減少します。 つまり 結果をより正確に求めるほど、測定に時間がかかります。
実用的な観点から、これは、バックグラウンドとこのバックグラウンドの小さな変動を測定するために、測定時間は長くなければならないことを意味します-数分。 デバイスを使用して「ホットスポット」を検索する場合は、時間を最小限に抑えることをお勧めします。
両方の要件を満たすために、適応測定アルゴリズムを作成しました。 これを行うために、パルスをカウントするプロセスで、スケッチは各パスでカウンターの内容をチェックし、それが所定の設定(100)を超える場合、サイクルから早期に終了します。 過剰がない場合、パルスのカウントは120秒で時間が経過するまで続きます。 したがって、バックグラウンド測定モードでは、測定に120秒かかり、1.3の標準偏差が得られます。
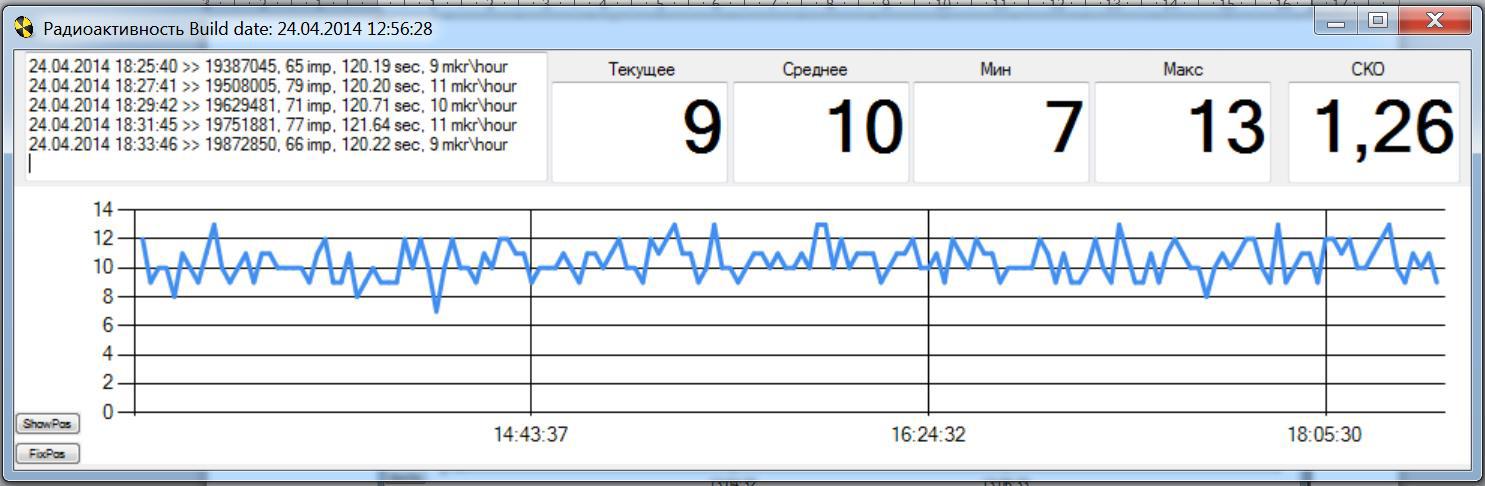
放射計のスクリーンショット、バックグラウンド値の測定:
状況が劇的に変化した場合、カウントははるかに早く終了し、内蔵ディスプレイと外部レシーバーの両方の測定値がはるかに速く更新されます。 「100」設定は、バックグラウンド測定のモニタリングから選択されます; 2分間で、パルス数は通常50〜80の範囲になります。 コンパスアクティビティを測定する場合、カウントサイクルは約10秒で、標準偏差は17.6です。
古いコンパスの放射能を測定するスクリーンショット放射計:

このコンパスは次のとおりです。

ここに通常の状況の写真があります。測定された背景は11 mcr / hで、モスクワでは通常に近い値です。

Geiger-Mullerカウンタを供給するには、400 Vの安定した電圧源が必要です。
750 rで購入した完成したPN3-400-0.1Mコンバーターを使用しました。 これらのコンバーターは、ebayから購入できます(「ガイガーカウンター電源モジュール線量計NEW 1 HV 400V高電圧」または「ガイガーチューブカウンターおよび線量計用の調整可能なHV高電圧電源モジュール」を検索)。
私は待ちたくありませんでしたが、その製品の著者(モスクワ地方であることが判明しました)を見つけました。彼はモスクワの彼の代表者の1人を私に勧め、現金で最寄りの地下鉄駅に連れて行ってくれました。 製品に問題はありませんでした。すぐに動作し、質問もありません。
私はこのデバイスにかなり大きなケースを使用しました。Gainta413は、150 x 80 x 30で、Brown Bearで購入しました。 最初は2つのガイガーミュラーカウンターを考えました-1つはベータ版、2つ目はガンマ版です。 1つの測定サイクルで、ガンマとベータのデータを別々にすぐに取得することができます。 最初のカウンターの上に2番目のカウンター用のスペースが用意されました。 しかし、システムを起動した後、1つのセンサーで放射計が希望どおりに動作することがわかりました。背景放射、古いコンパス、結晶オブジェクト、トリウムでの溶接電極、カリウム肥料の袋に激しく反応します。 したがって、色域に2番目のセンサーを取り付けることを拒否し、バックアップ計画に切り替えました-Glonass \ GPSナビゲーターの展開。 実際の利点はこのように考えられました-「ホットスポット」を見つけて(例えば、コテージで)、座標を書き留めて、消毒のために緊急事態省に転送しました。 現実には、新しいテクノロジーをいじってみるのはおもしろかったです。
ベータ粒子は、低浸透性が特徴です。 1枚の紙でさえ深刻な障害であり、厚さ約5 mmの場合は言うまでもありません。 Beta 2センサーを最大限に活用するために、開口部に丸いハッチを設けて、ベータ線がセンサーに直接アクセスできるようにしました。 ケースの丸い穴は、木の丸鋸で作られています。 カバーは、国内の大陸間弾道ミサイルの発射装置に基づいて作られています。 裏面には、事務用ナイフの破片の平らなストッパーが取り付けられており、削り器で長方形に縮小されています。 カバーを固定するために、ターミナルクライアントキットのマグネットが使用されました。 この端末クライアントでは、そのような磁石は脚として使用されます。 磁石を使用する場合、この合金のキュリー点は摂氏80度未満であり、過熱すると特性が失われることに注意してください。

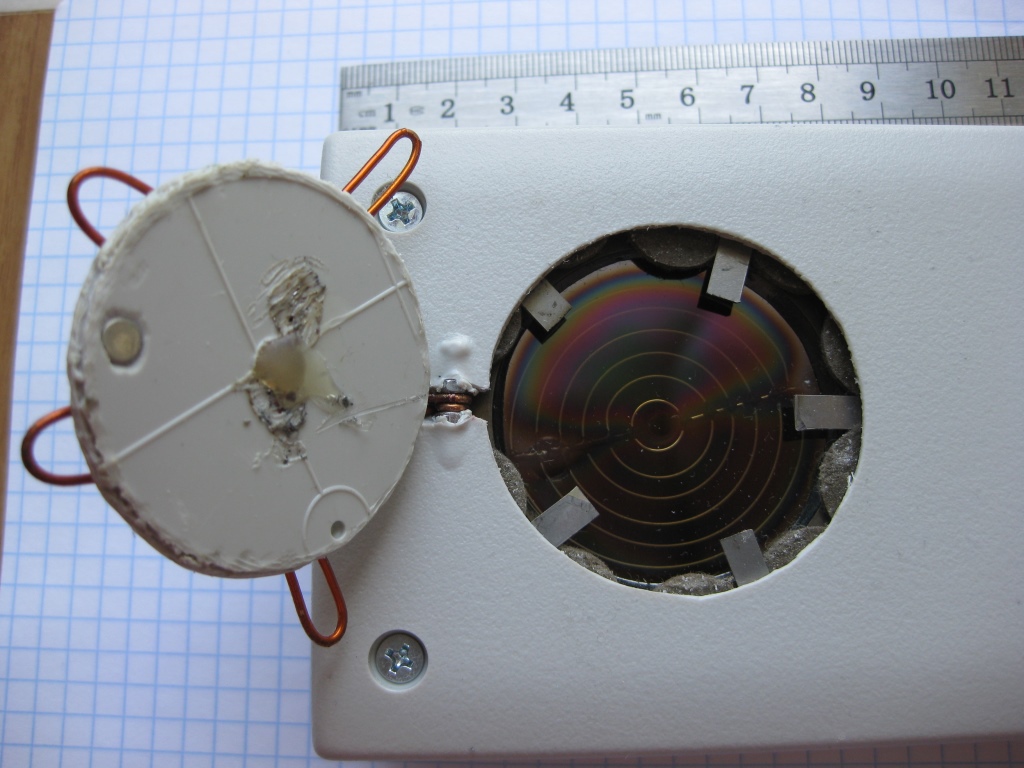
ベータ粒子の通過のための開口蓋を備えたハウジングの下部のデバイス:
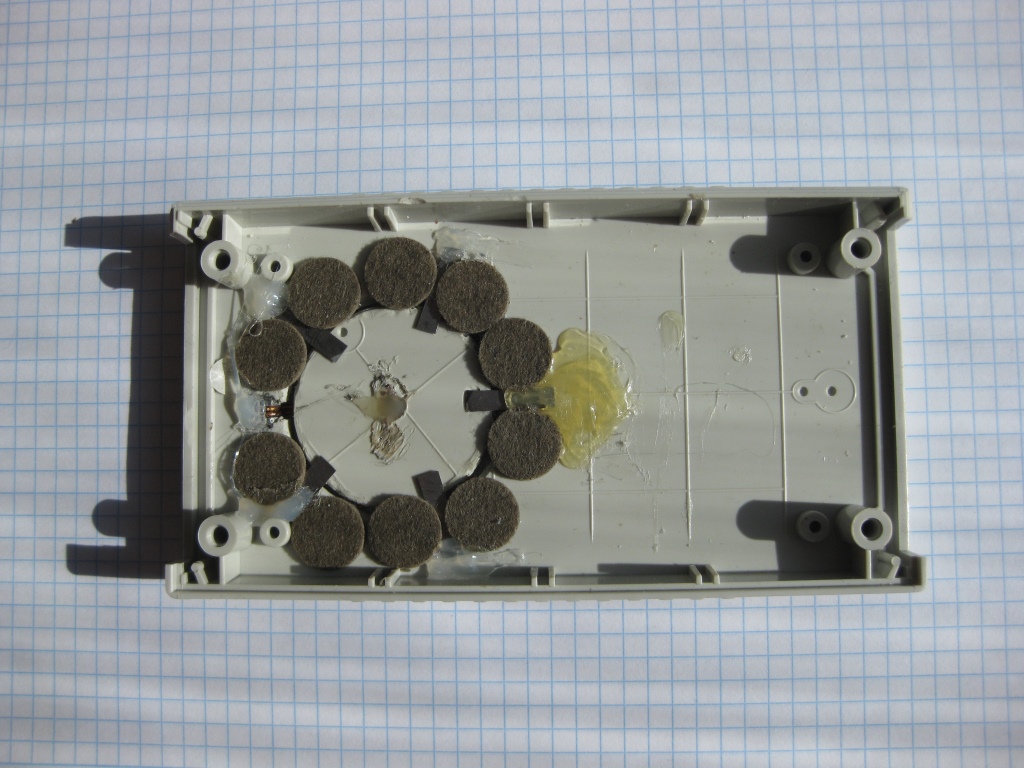

Beta-2センサーは、底板のカウンター直径よりわずかに大きい穴にあります。 粘着性のフェルトサークルがカウンターの下に取り付けられ、センサーの底面と本体の間のスペーサーとして機能します。 センサーの雲母の窓は非常に薄く、慎重な取り扱いが必要です。 デバッグ後の最終アセンブリで、センサーをケースの穴に合わせ、センサーをホットグルーで固定しました。
アクティビティを測定するか、弱いベータエミッターを検索する必要がある場合は、ウィンドウを開く必要があります。
例:暗闇で輝く構図の古いコンパス。 蓋を閉じた状態-1時間あたり70マイクロレントゲン。 蓋が開いている-1時間あたり200マイクロレントゲン。

クリスタルガラスの放射能測定:

ナビゲーションモジュール。
最初に、ebay GPS \ GlonassでUBLOX7mベースの受信機を見つけました。 このデバイスは次のようになります。
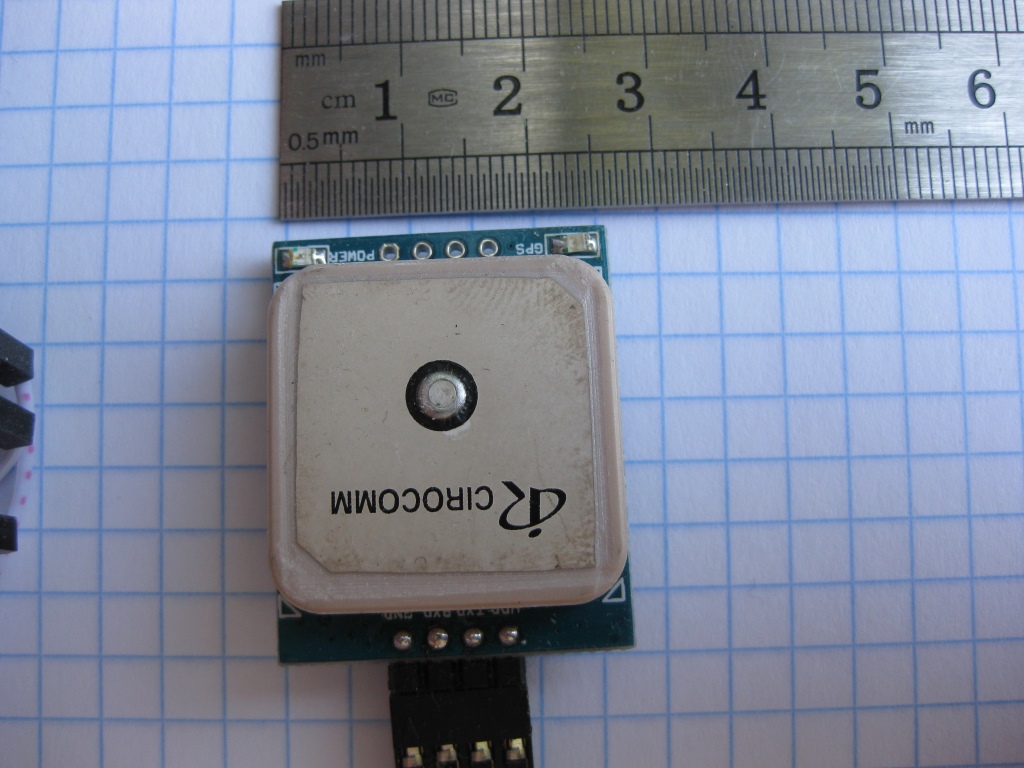
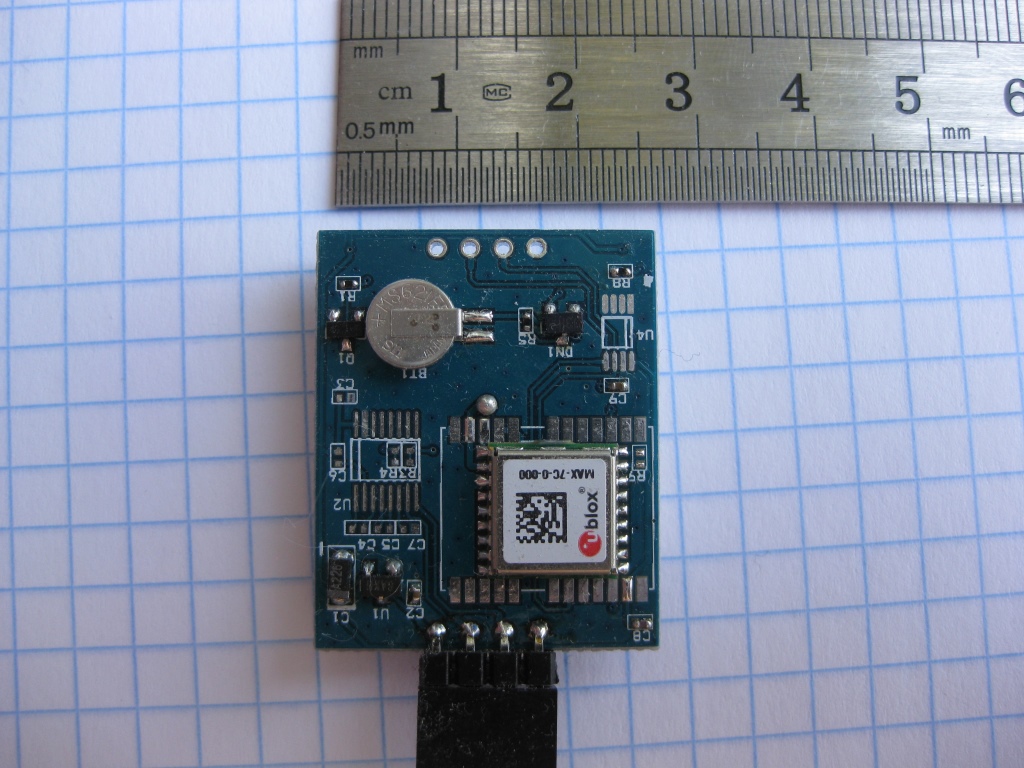
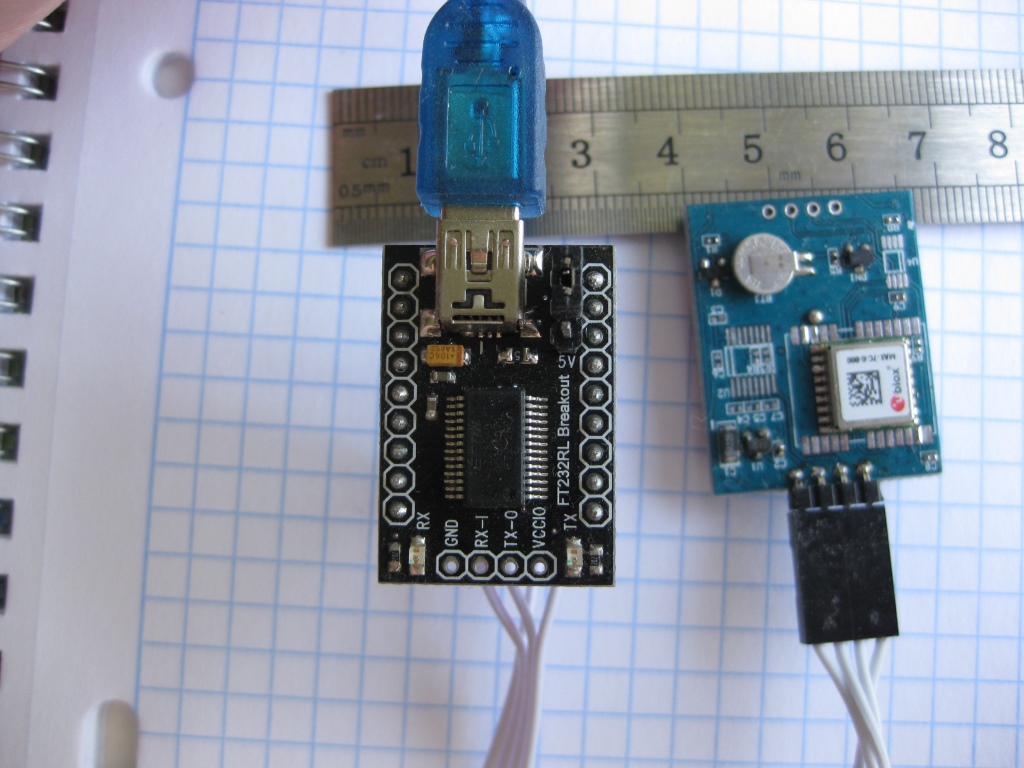
それは単純に接続します-それに電源(+ 3.3V)を適用し、3.3 Vをシリアル接続に接続するだけで十分です。 FT232ベースのコンバーターを使用しました。

独自のプログラムを使用すると、モジュールで遊ぶことができます-場所の座標を取得したり、衛星を見るなど。
ubloxプログラムのスクリーンショット:
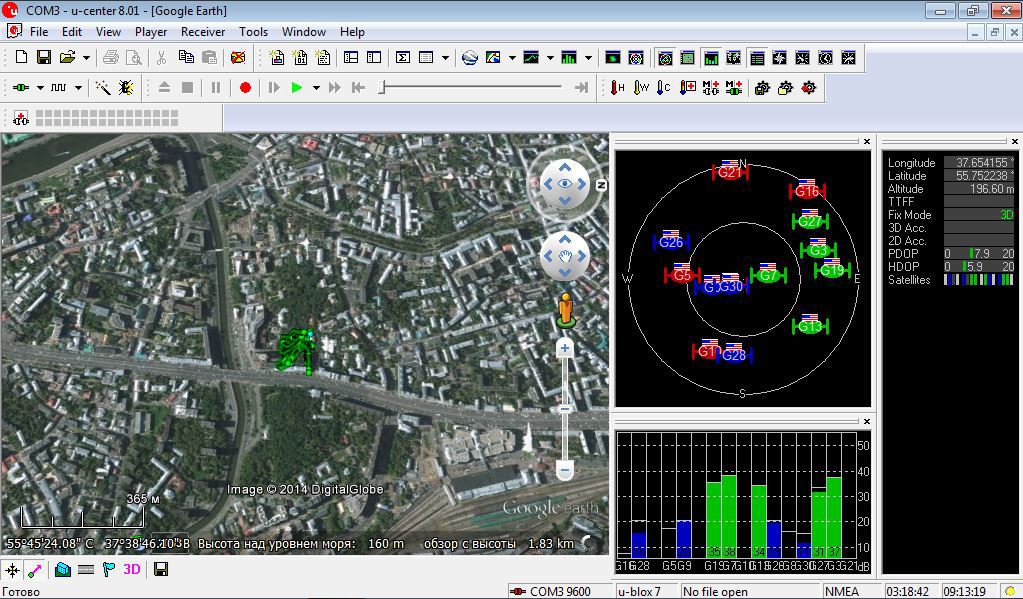
残念ながら、モジュールはGlonassコンステレーションで機能しますが、切り捨てられます。 まず、モジュールはシングルチャンネルです-つまり 彼は特定の瞬間に1つの星座でしか作業できません。 コンスタレーションの切り替えには、モジュールの再起動が必要です。 第二に、グロナス星座がオンになると、モジュールは差分補正衛星からのデータの処理を停止します。
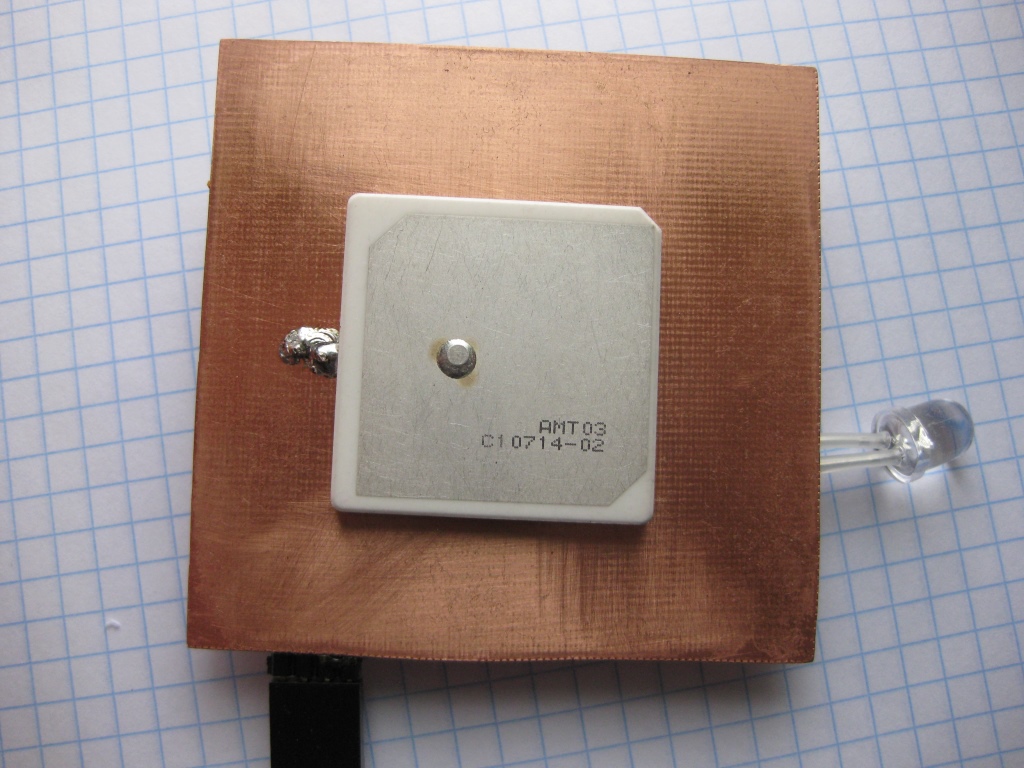
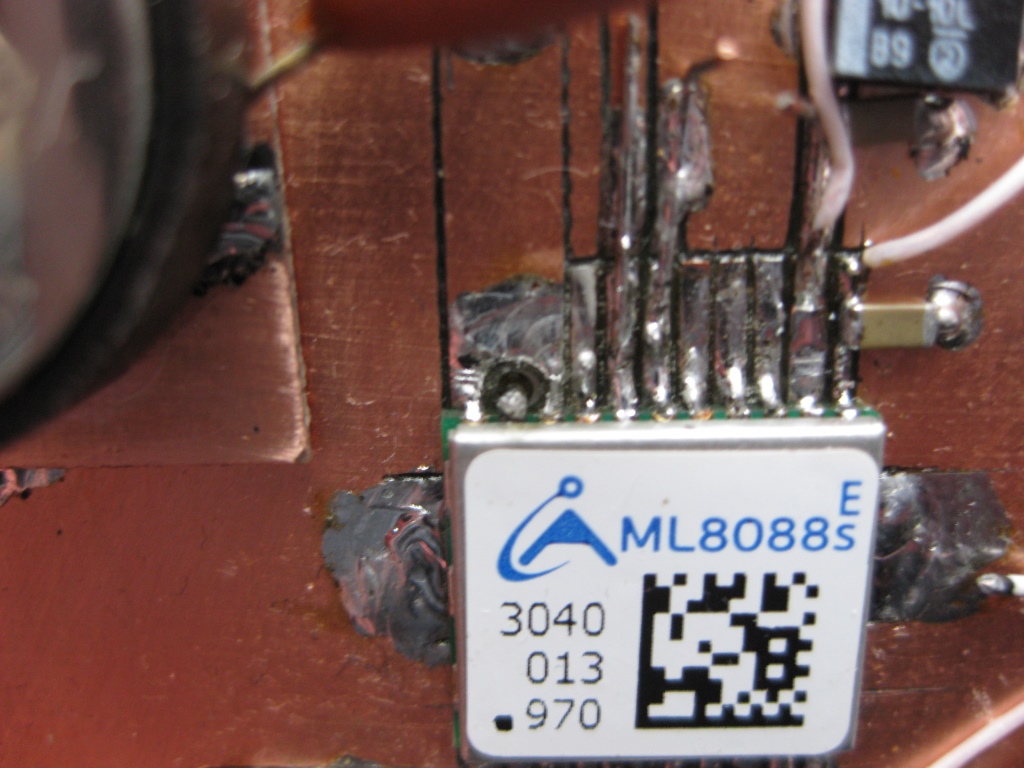
モジュールをGlonassとGPSと同時に動作させたいと思いました。 そのようなモジュール、特にサンクトペテルブルグの会社NaviaのML8088があります。 残念ながら、自家製のデバイスにインストールするのに適したすぐに使えるモジュールは見つかりませんでした。 ML8088には既製のデバイスがありますが、価格やサイズの点で私のデバイスには適していません。 そして、モジュールを作成することにしました:)。 アンテナB35-3556920-AMT03 [GPS / GLONASS]とDESSY.RUのML8088seモジュールを購入しました 。 2システムアンテナが必要です-GlonassとGPSの搬送周波数はわずかに異なります。
アンテナの製造元の指示に従って、中心部で7 x 7 cmの導電性ベースに取り付ける必要があります。 私の場合、7 x 7 cmの正方形が正確に配置されました。 GLONASSモジュールを設計するとき、アンテナをML8088モジュールの入力に接続する方法を決定する必要がありました。 マニュアルによると、インピーダンスが50オームのマイクロストリップまたはコプレーナラインを使用する必要があります。 このようなラインには、PCB上に十分に正確な導電性ストライプが必要です。 これを事務用ナイフでボード上の歯が生える私のお気に入りの方法にすることは困難です。 状況を慎重に検討したので、マイクロストリップラインをまったく使用せず、アンテナを受信機の入力に直接接続することにしました。 マニュアルには、アンテナから入り口までの伝送線が短いほど良いと書かれています。 したがって、長さゼロが最適です。 それに応じて、アンテナの設置場所からボードを開発する必要がありました。 ただし、7 x 7 cmのボードサイズの場合、マイクロモジュールの変位は問題を引き起こしません。
この設計には、要素のインストールの特定のシーケンスが必要でした。 最初にアンテナを接着し、次にML8088を取り付けて、アンテナ脚が端子21のくぼみに入り、その位置でML8088をつかむ必要がありました。 次に、ML8088端子の位置をマークし、マイクロモジュールを取り外して、トラックを切断します。 冷却のために休憩を取って、チップの脚をはんだ付けします。 残念なことに、私は間違っていて、アンテナをはんだ付けする前にアンテナ出力の深さを下げることはしませんでした。 はんだ付けが機能しなかったため、システムは1時間の作業後に数個の衛星を捕らえました...状況について考えた後、アンテナを取り外し、出力を照射し、アンテナをはんだ付けし直すことにしました。 問題は、アンテナをベースから同時に外し、出力をはんだ付けする必要があることです。 しかし、幸運なことに、「飲まない」という診断を正しく行い、アンテナをベースから少し剥がすとすぐにアンテナが脚から跳ね返りました。 さらに、すべてがうまくいきました-私は結論を錫メッキし、アンテナをはんだ付けし、システムは正常に機能しました。
アンテナ接続を希釈する場合、ドキュメントの要件を考慮することが不可欠です。アンテナのアースはピン20と22に接続し、共通のアースとの接触がないようにする必要があります。 これは、アースループの形成を防ぎ、ノイズ耐性を低下させるために必要です。 ML8088のピン20と22は、マイクロモジュール内のグランドに接続されています。
工場出荷時にML8088sEのファームウェアがフラッシュされ、「解決策がある」という出力のゆっくりした点滅をサポートしていなかったことが判明しました。製造元に連絡し、新しいファームウェアと詳細な点滅手順を受け取りました。うまくいきました。私の質問に親切に根気よく答えて
くれたウラジミール・オサドチー(ナビアのテクニカルディレクター)に感謝します。
「ナビゲーションの問題(GNSS)の解決策があります。」信号の変換に失敗しました。これは、モジュールがナビゲーションの問題を解決し、モジュールが提供するデータが正しい場合に、0.5 Hzの周波数で点滅する信号です。信号振幅は1.8ボルトで、この出力の負荷容量は約2 mAです。しかし、マニュアルの図(AppNote 1_1.pdfを含むML8088sE)は機能しませんでした。
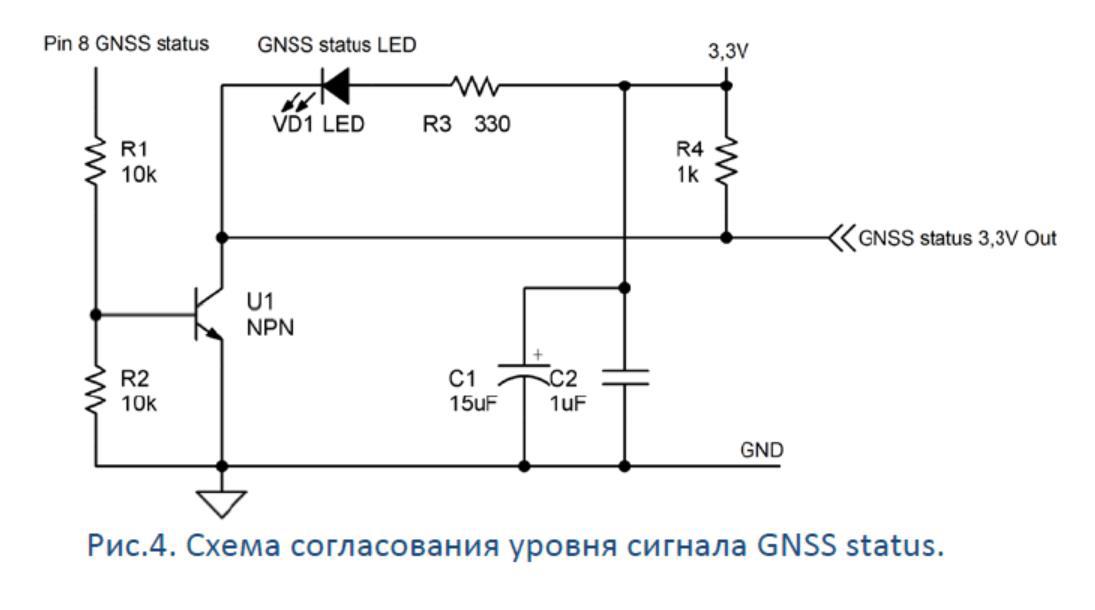
どうやら-トランジスタを自信を持って開くのに十分な出力の耐荷重能力がなかったようです。効果は奇妙でした-システムが正しく起動しなかった場合-変換回路を制御するのに十分なレベルの信号がこの出力で生成され、モールス信号で制御LEDが喜んで点滅しました。また、システムが正常に起動すると、信号の振幅は小さくなり、トランジスタは開きませんでした。開発者によると、信号は十分なはずです。彼はバルコニーからオシロスコープを持ち込み、信号があることを確認しましたが、レベルは低く、わずか0.4ボルトです...ウラジミールオサチーはトランジスタの特定のモデルを命名しました。これは間違いなく彼のために機能しますが、私は自分のやり方で別のゴミコンパレータLM393を適用しました:)。このコンパレータの2番目のチャネルを使用して、PPS信号を示しました。途中で、1PPS信号のパラメーターを変更し、200μsの長さの信号を作成しました。これで、短いmyrgを使用して、システムの機能を快適に控えめに表示できます:)。
Glonass \ GPSモジュールの最終バージョンは次のようになります。

ケースに入れられ
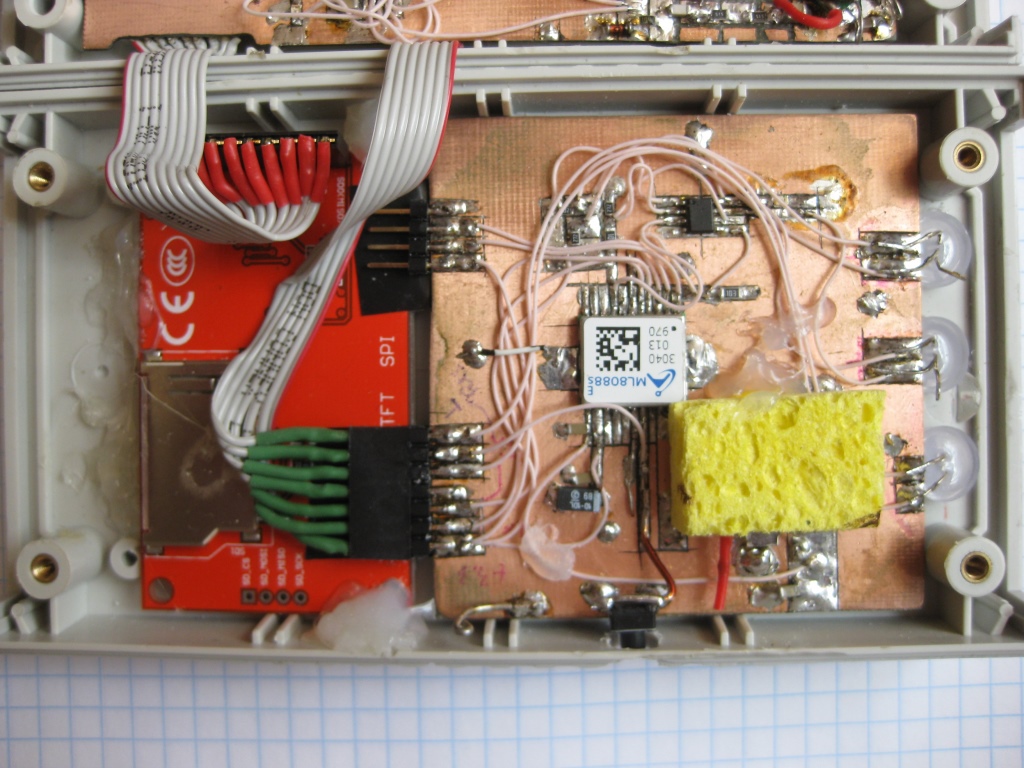
ます:上部の未接続コネクタは、モジュールにファームウェアを入力するように設計されています。
柔らかいプラスチックで作られた黄色の長方形-リモート敷設、ケースを閉じるときにベータ2に接しています。
ML8088sEモジュールには2つのシリアル通信チャネルがあります。ナビゲーションデータは1つずつ進み、デバッグ情報またはファームウェアは2番目に進みます。デフォルトでは、チャネルは115200の速度で構成されています。57600に切り替えました。Wi-FiモジュールHI-LINK HLK-RM04の2番目のチャネルの速度制限のため、これを行う必要がありました。それについての詳細はやや低いです。
CR2032などの外部バックアップバッテリーを使用しました。これにより、衛星の位置の迅速な計算とキャプチャから追跡モードまでに必要なすべてがすでにメモリにあるため、モジュールの起動がはるかに速くなります。このモードでは、通常、モジュールをリセットする必要はありません。リセットは、初めて電源を入れたとき、またはモジュールが正しく起動しなかった場合に必要です。モジュールが正しく起動しなかった場合、ソリューションの存在を示すLEDが特定のコードを周期的に繰り返します。リセットすると、モジュールが正常になります。私の場合、部品をはんだ付けした後にリセットが必要でした。 2つの独立したモジュールリセットメカニズムを実装しました。最初のボタンは、干渉しないように、また誤って押されないように、ケースに埋め込まれた通常のボタンです。 2つ目はソフトウェアです。起動時に、スケッチは5秒間待機してから、ML8088sEからのデータの受信を開始します。タイムアウト間隔のデータがない場合、スケッチはピンA0からの負のパルスでモジュールをリセットします。重要-モジュールを起動するときは、リセットピンを高インピーダンスの3番目の状態にする必要があります。したがって、リセットコマンドを発行した後、A0の出力を入力モードにしました。 Arduinoボタンと出力は、「マウント」モードで接続されています。
私のデバイスは、HI-LINK HLK-RM04シリアルポートイーサネットWi-Fiアダプターモジュールモジュールを介して外部と交換します。これは、本質的に優れた機能を備えたミニルーターです。 Wi-Fiへのコンバーターモードのシリアルポートで使用します。デバイスには2つのポートがあり、1つは最大115200、2つ目は最大57600の速度で動作します。Glonassナビゲーターは2つ目のポートに接続されるため、ML8088の交換レートを57600に下げる必要がありました。アンテナ。店内の写真には、内部チップアンテナがあります。DESSY.RUのANT 2.4 ESG-2400-12 UFL-Fなどの外部アンテナを購入しなければならず、DXに匹敵する価格の引き下げを要求しました。同様のアンテナDXにはありますが、Wi-Fiモジュールを購入したらすぐに購入する価値があるでしょう。ルーターとPCIカードからモジュールに2つの異なるピンアンテナを接続しようとしました-動作しますが、信号レベルはフラットアンテナに比べて約10 dB低くなります。さらに、ケース内に配置すると非常に便利です。
Wi-Fiモジュールには、内部スタビライザーからの3.3ボルト出力があります。 GlonassモジュールML8088sEに電力を供給すれば十分です。
最初のチャネルは、Arduinoを操作するために使用されます。 Arduinoプログラムで生成されたデータ(放射計から)は、Wi-Fiモジュールの最初のチャネルに送信され、ホームネットワークに送信されます。これらは、指定されたIPアドレスとポートに接続できるPUTTYタイプのプログラムで受信できます。ナビゲーターは2番目のシリアルポートに接続されます。ナビゲータからのデータはArduinoのシリアルポートにも届き、プログラムはナビゲータからのデータを処理して画面に表示します。
ソフトウェアシリアルポートの使用に関する問題を調査しましたが、確実に機能せず、多大な労力を必要とするプログラミングが必要であると判断しました。そこで、ハードウェアのハックを思いつきました:)。
最初に、シリアルポートでの情報の送信がどのように配置されているかを思い出させてください。直列信号は、+ 5 Vから0への負のドロップによって送信されます。初期の非アクティブ状態では、信号は高レベル(+ 5 V)です。 Arduino Nanoの内部では、FT232出力からの信号は、1キロオームの保護抵抗器を介してATMEGA328Pシリアル入力に送信されます。回路図の一部を次に示します。
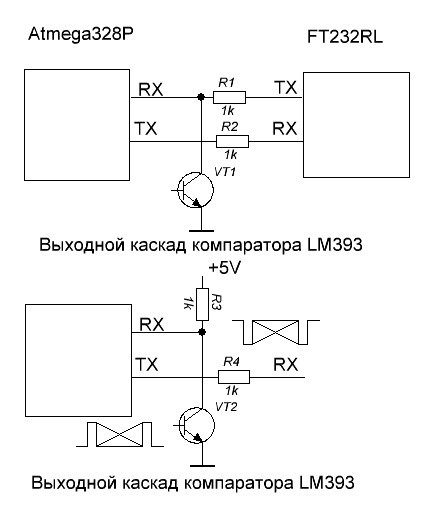
上の図は、Arduinoボード内のRXピンとTXピンの接続を示しています。 RX Atmega328PピンはArduinoコネクタのレッグに直接接続され、同時に1k抵抗を介してUSBシリアルFT232RLコンバーターのTXピンに接続されます。これにより、シリアルデータをコネクタレッグに転送でき、信号は目的のマイクロプロセッサ出力に直接送られ、FT232出力が高レベルの場合は正しく処理されます。コンピューターがArduinoに何も送信しない場合、またはArduinoがコンピューターに接続せずに自律的に動作する場合、この条件が満たされます。この場合、下図に示すように、Atmega328Pシリーズの入力は実際には1kΩ抵抗を介して5ボルトにプルアップされます。 FT232を介したコンピューターからの通常のデータ転送に干渉しないようにするには、オープンコレクタートランスミッターを使用して、閉じた状態にする必要があります。一連のチャンネルを常時稼働させる必要がある場合。 LM393のようなオープンチャンネルタイプの出力を持つ2チャンネルコンパレータを一定数だけ持っていました。
Glonassモジュールのシリーズポートからの信号は、オープンコレクタータイプの出力を備えたコンパレーターを通して送信されます。プロセッサがリセットされると、ピンA1は3番目の状態に上昇します。コンパレータの反転入力は、実際には抵抗R11を介してグランドに接続されています。コンパレータの非反転入力には、0.4〜3.3 Vの範囲の正電圧があります。コンパレータの出力は完全に閉じた状態にあり、Arduinoの動作には影響しません。マイクロプロセッサとコンピューターの交換、スケッチのメモリへのロード-すべてが通常どおり行われます。スケッチを開始すると、A1出力が出力モードに切り替わり、+ 5 Vの高レベルが設定されます。反転入力の電圧は1.65 V(3.3 Vの半分)になります。コンパレーターは、Glonassモジュールからの信号シリーズのリピーターとして機能し始めます。スケッチは、標準のシリアルポートからデータを読み取り、受信データを処理します。 Arduinoへのスケッチのダウンロードを開始すると、FT232は最初にプロセッサリセットを生成し、ピンA1は3番目の状態になり、コンパレーターの出力は閉じた状態になり、Arduinoの直列入力に影響を与えなくなります。 GLONASSモジュールからのデータ転送は終了し、スケッチは正常にロードされます。
LM393コンパレータが使用されたのは、テーブル上のボックスにそれらの多くがあり、それらがガスセンサーモジュールから取り外された後に得られたからです。当然、このようなハックを実装するために、オープンコレクターや制御入力などの出力を持つ別のロジック要素を適用して、出力を3番目の状態に変換できます。
情報フローを接続するこの方法は、「編集OR」と呼ばれます。
Wi-Fiモジュールの2番目のチャネルを介して、Naviaが提供するNavia Viewerプログラム用にML8088モジュールとの完全な通信が編成されます。プログラムは、シリアルポートを介して接続されたモジュールと通信できます。 Tibboプログラムを使用して、仮想シリアルポートを整理しました。 Tibboは、同様のプログラムとは異なり、手動での介入を必要とせずに自動的にチャネルを開始および編成します。HWGroupの仮想シリアルポートドライバーも試しました。動作しますが、コンピューターを起動した後に手動で操作する必要があります>、これは不便です。
いくつかのスクリーンショットを次に
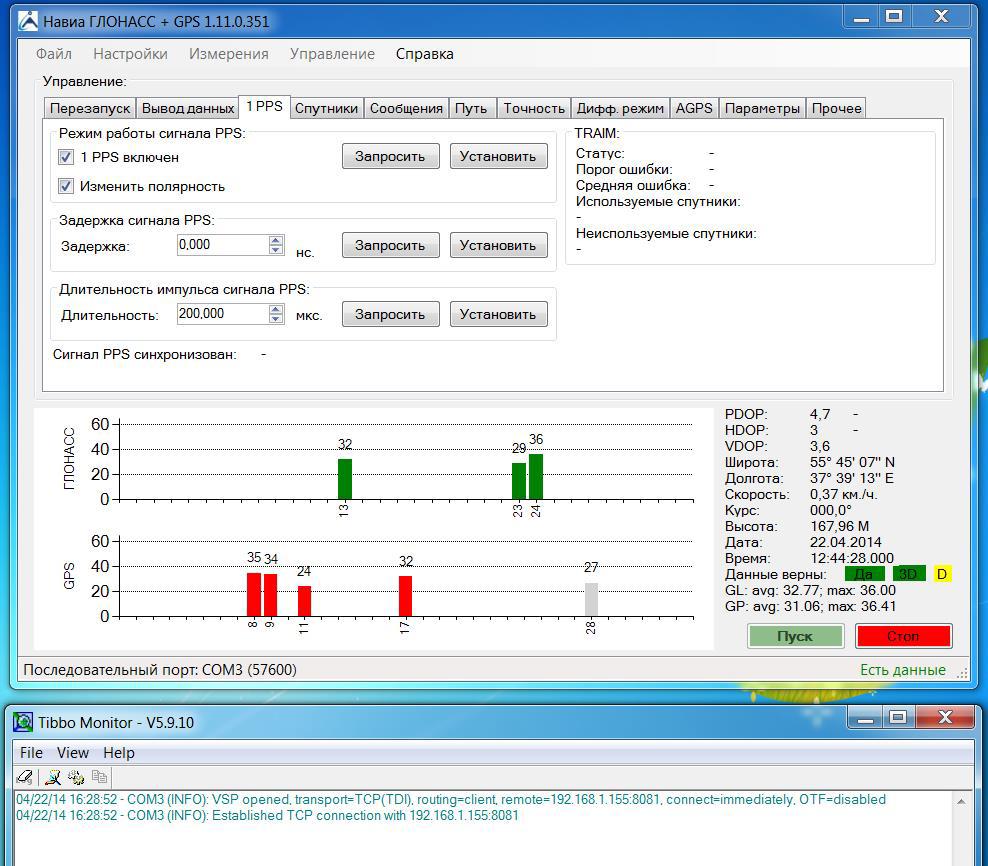
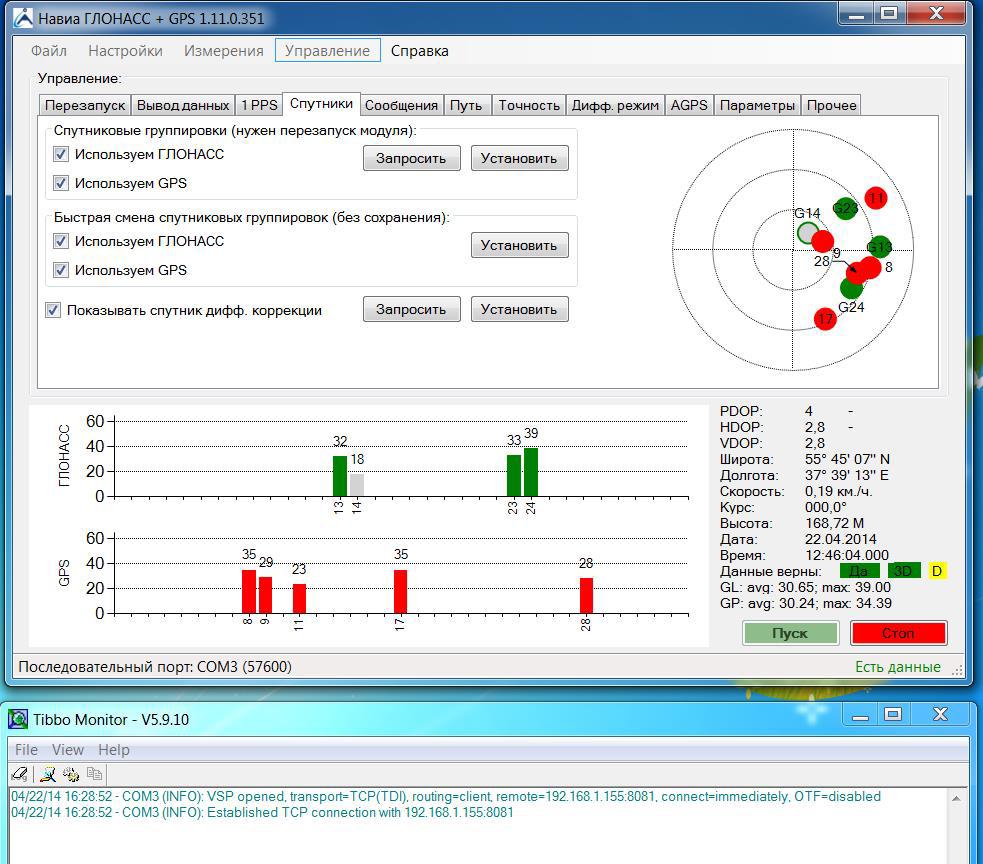
示します。差分補正のサテライトが存在する場合に興味深い別のスクリーンショットは、青い丸の
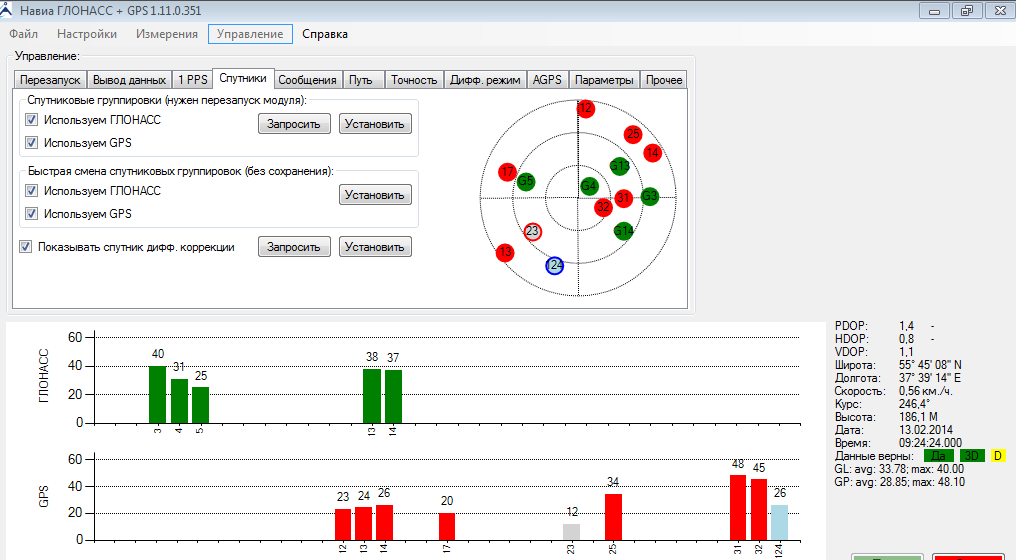
中にあります。このワークステーションは、VMwareワークステーションを実行する仮想マシンで実行します。
スクリーンショットから、TIBBOが192.168.1.155:8081との接続を確立し、仮想シリアルポートCOM3として提示したことがわかります。 Navia GLONASSでCOM3通信ポートが設定され、このすべてのエコノミーは、仮想コンピューターの起動時に自動的に着実に離陸します。
おそらく、Navia GLONASSの作成者は、シリアルポートだけでなくTCPIPチャネルとも直接通信できるように、プログラムを完成させることに関心があるでしょう。
デバイスで使用されるディスプレイdilekstrimaで約300 pで購入されました。ディスプレイはILI9341コントローラーを使用しています。これについてはほぼすべてが知られていますが、ライブラリーと豊富な使用経験があります。唯一の微妙な点は、ディスプレイの電源が+5ボルトであり、入力の定格が3.3vであることです。 nanoをArduinoに直接接続すると、動作しませんが、燃えません。最も単純なコンバータ5-> 3.3-連続して接続された2.7 kの抵抗器を使用しましたが、MOSI信号には抵抗器は不要で、ディスプレイからプロセッサに送られます。 LED信号も変換する必要はありません。
ディスプレイを操作するために、わずかな変更を加えた標準TFT v2ライブラリが使用されました。標準ライブラリでは、シンボル出力は目的のポイントを強調表示しますが、点灯していないポイントは消去しません。画面を消去した後、最初はすべてが正しくなりますが、2番目以降は正しくありません。マトリックスポイントはオンになりますが、オフにはなりません。数十回繰り返した後、シンボルの色で完全に照らされた長方形が画面に表示されます。シンボルで使用されていないポイントに背景色を表示するスライスをライブラリコードに追加しました。
ライブラリコードの変更
old:
void TFT :: drawChar(INT8U ascii、INT16U poX、INT16U poY、INT16Uサイズ、INT16U fgcolor)
{
if((ascii> = 32)&&(ascii <= 127))
{
;
}
他に
{
ascii = '?'-32;
}
for(int i = 0; i <FONT_X; i ++){
INT8U temp = pgm_read_byte(&simpleFont [ascii-0x20] [i]);
for(INT8U f = 0; f <8; f ++)
{
if((temp >> f)&0x01)
{
fillRectangle(poX + i *サイズ、poY + f *サイズ、サイズ、サイズ、fgcolor);
}
}
}
}
新規:
void TFT :: drawChar(INT8U ascii、INT16U poX、INT16U poY、INT16Uサイズ、INT16U fgcolor)
{
if((ascii> = 32)&&(ascii <= 127))
{
;
}
他に
{
ascii = '?'-32;
}
for(int i = 0; i <FONT_X; i ++){
INT8U temp = pgm_read_byte(&simpleFont [ascii-0x20] [i]);
for(INT8U f = 0; f <8; f ++)
{
if((temp >> f)&0x01)
{
fillRectangle(poX + i *サイズ、poY + f *サイズ、サイズ、サイズ、fgcolor);
}
他に
{
fillRectangle(poX + i *サイズ、poY + f *サイズ、サイズ、サイズ、黒);
}
}
}
}
void TFT :: drawChar(INT8U ascii、INT16U poX、INT16U poY、INT16Uサイズ、INT16U fgcolor)
{
if((ascii> = 32)&&(ascii <= 127))
{
;
}
他に
{
ascii = '?'-32;
}
for(int i = 0; i <FONT_X; i ++){
INT8U temp = pgm_read_byte(&simpleFont [ascii-0x20] [i]);
for(INT8U f = 0; f <8; f ++)
{
if((temp >> f)&0x01)
{
fillRectangle(poX + i *サイズ、poY + f *サイズ、サイズ、サイズ、fgcolor);
}
}
}
}
新規:
void TFT :: drawChar(INT8U ascii、INT16U poX、INT16U poY、INT16Uサイズ、INT16U fgcolor)
{
if((ascii> = 32)&&(ascii <= 127))
{
;
}
他に
{
ascii = '?'-32;
}
for(int i = 0; i <FONT_X; i ++){
INT8U temp = pgm_read_byte(&simpleFont [ascii-0x20] [i]);
for(INT8U f = 0; f <8; f ++)
{
if((temp >> f)&0x01)
{
fillRectangle(poX + i *サイズ、poY + f *サイズ、サイズ、サイズ、fgcolor);
}
他に
{
fillRectangle(poX + i *サイズ、poY + f *サイズ、サイズ、サイズ、黒);
}
}
}
}
また、RESETとCSを起動するコードの一部を変更する必要がありました。ライブラリはピンD4およびD5を使用するように設計されており、タイマーを操作するために必要でした。したがって、表示ピンはピンD8(リセット)とD9(CS)に接続され、コードに次の変更が加えられます。
ライブラリコードの変更
old:
#define TFT_RST_LOW {DDRD |= 0x10;PORTD &=~ 0x10;} //Added by Vassilis Serasidis (18 Oct 2013)
#define TFT_RST_HIGH {DDRD |= 0x10;PORTD |= 0x10;} //Added by Vassilis Serasidis (18 Oct 2013)
#define TFT_CS_LOW {DDRD |= 0x20;PORTD &=~ 0x20;}
#define TFT_CS_HIGH {DDRD |= 0x20;PORTD |= 0x20;}
new:
#define TFT_RST_LOW {DDRB |= 0x01;PORTB &=~ 0x01;} //changed by Sergey Dronsky 26 dec 2013
#define TFT_RST_HIGH {DDRB |= 0x01;PORTB |= 0x01;} //changed by Sergey Dronsky 26 dec 2013
#define TFT_CS_LOW {DDRB |= 0x02;PORTB &=~ 0x02;} //changed by Sergey Dronsky 26 dec 2013
#define TFT_CS_HIGH {DDRB |= 0x02;PORTB |= 0x02;} //changed by Sergey Dronsky 26 dec 2013
#define TFT_RST_LOW {DDRD |= 0x10;PORTD &=~ 0x10;} //Added by Vassilis Serasidis (18 Oct 2013)
#define TFT_RST_HIGH {DDRD |= 0x10;PORTD |= 0x10;} //Added by Vassilis Serasidis (18 Oct 2013)
#define TFT_CS_LOW {DDRD |= 0x20;PORTD &=~ 0x20;}
#define TFT_CS_HIGH {DDRD |= 0x20;PORTD |= 0x20;}
new:
#define TFT_RST_LOW {DDRB |= 0x01;PORTB &=~ 0x01;} //changed by Sergey Dronsky 26 dec 2013
#define TFT_RST_HIGH {DDRB |= 0x01;PORTB |= 0x01;} //changed by Sergey Dronsky 26 dec 2013
#define TFT_CS_LOW {DDRB |= 0x02;PORTB &=~ 0x02;} //changed by Sergey Dronsky 26 dec 2013
#define TFT_CS_HIGH {DDRB |= 0x02;PORTB |= 0x02;} //changed by Sergey Dronsky 26 dec 2013
プログラムの全文と変更されたライブラリは、 ここにあります。
デバイスの最終バージョンでは、カウンターT1のみが関与し、D5の出力からのパルスをカウントします。 結論D4は未使用のままです。
デバイスは24 x 7モードで使用するように設計されているため、画面の焼損の影響に対する対策を講じました。 画面に表示されるすべての要素はランダムに色が変わり、画面内を少しランダムに動きます。 適切な操作のために非常に必要だとは言えませんが、プログラムするのは楽しかったです:)
デバイスは、ArduinoのミニUSBコネクタを介して給電されます。 内部バッテリーは提供されませんでしたが、自律的に動作する機能を確保するために-たとえば、庭のプロットを確認するために、4000 mahの容量を持つ電力銀行が購入されました。 測定により、約3000 mahの実際の容量が示されましたが、この容量は放射計が10時間以上動作するのに十分です。 田舎を歩くだけで十分です。
データを受信して処理するには、Visual StudioExpress 2012のVisual Basicで作成されたRadiometerプログラムを使用します。
プログラムは、バックグラウンドストリームで放射計からデータを受信し、受信したデータをテキストとグラフの形式で表示します。
このプログラムは、信号が失われた場合に接続回復メカニズムを実装します。 チャネルがクラッシュし、指定されたタイムアウトの期限が切れた後にデータがない場合、プログラムはチャネルを閉じ、「しっぽ」をきれいにして、チャネルを再び開きます。 そして、接続が復元されるまでそうします。 放射計の場合、3分のタイムアウトが設定されます。 データを受信する通常の間隔は2分です。 プログラムが正しく実行され、シャットダウンされます。送信モジュール、Wi-Fiアクセスポイント、またはデータストリームのパスに沿って接続された機器の電源を入れます。
チャネルの開閉イベントが記録されます。 プログラムの開始および停止イベントも記録されます。
データとイベントは別々に2つのテキストファイルに書き込まれます。
タイマーがアクティブになると、10分ごとに1回、統計をログファイルに書き込むプログラムが実行されます。
チャネルからデータを受信すると、それらはバッファに配置され、特定の条件に達すると、このバッファは入力データ処理プログラムに送信されます。 このプログラムでは、文字列の最後のバイトがvbCrLf(つまり、16進(0D0A)、文字「キャリッジリターン」、「リターンライン」)であることが条件です。
処理ルーチンは、正規表現メカニズムを使用して、正式な妥当性について入力文字列をチェックします。 行の形式が無効な場合、これはログファイルに記録されます。 文字列に有効な形式がある場合、プログラムは正規表現メカニズムを使用して文字列を要素に分割し、要素の配列を生成します。
さらなる処理は、「FIFOキュー」タイプ(QUEUE)の配列に必要な要素を入力することです。
QUEUE配列は、最大、最小、平均、標準偏差を計算します。 最大、最小、および平均を計算するには、キューの既製のメソッドが使用されます。 標準偏差の計算は、キューの要素を配列に出力し、この配列を処理することにより行われます。 ドキュメントから理解できる限り、独自の方法を作成できますが、すぐには解決せず、将来のために残しました:)。
キューの長さは2400要素になるように選択されます。データの間隔が2分である場合、約80時間前に放射能の背景が表示されます。
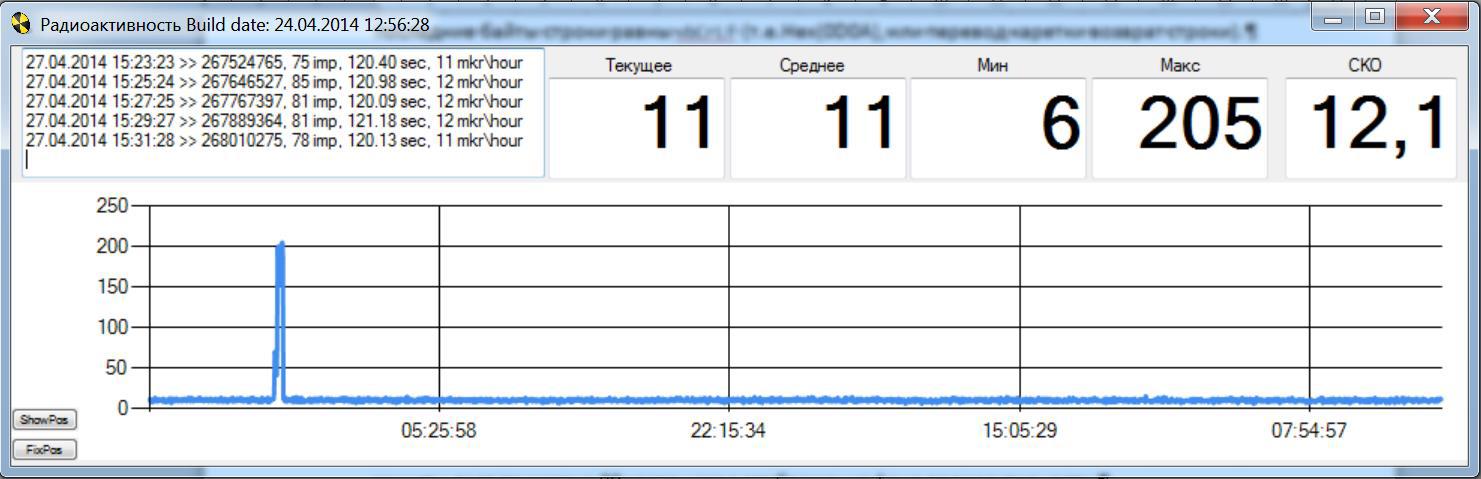
グラフのピークは、コンパスを提示した結果です。
プログラムはここからダウンロードできます
Arduinoでのスケッチの説明。
ブロック-スケッチスキーム:
プログラムの開始
ディスプレイの初期化
T1タイマーの初期化、外部入力からパルスカウントモードに転送します。
57600の速度でのシリアル交換の初期化
メインスケッチサイクル
カウンターリセット
開始時間の記憶
シリアルポートからデータを受信し、メッセージ1(「$ GPRMC」)を検索します
シリアルポートからデータを受信し、メッセージ2( "$ GPGGA")を検索します
シリアルポートからデータを受信し、メッセージ3( "$ GPVTG")を検索します
GLONASS \ GPSからのデータの分析と表示
カウンタT1の現在のステータスを表示します
サイクルの終了条件の確認-時間が経過したか、カウンターが100を超えるパルスをカウントした
メーターとタイマーの記録
放射能の価値の計算
出力を表示する
シリアルチャネルへの出力
統合ディスプレイへの出力の説明。
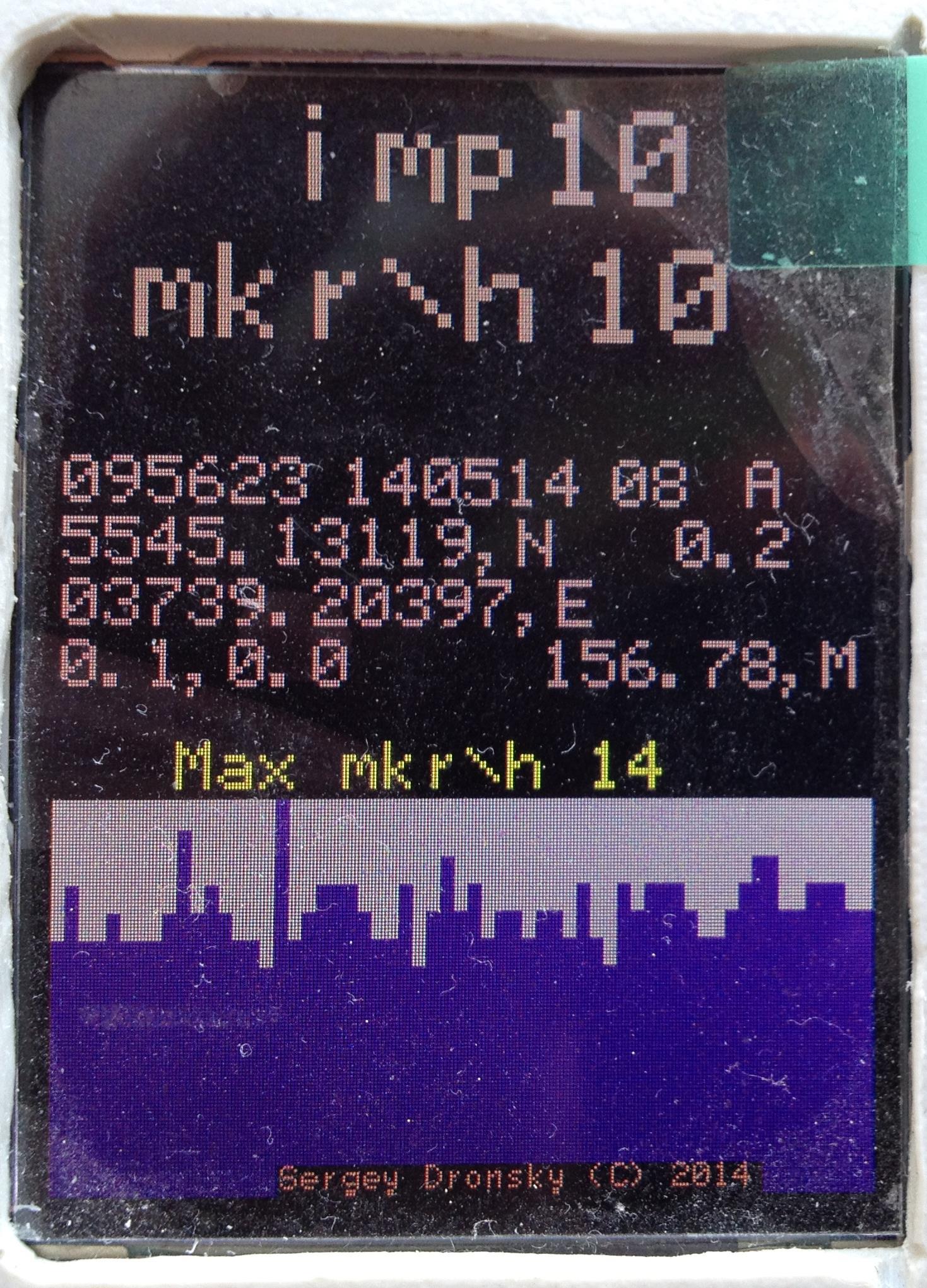
最初の行は、放射能の測定中に検出されたパルスの数を示しています。 数は約1秒に1回変化します。
2行目は、前のサイクルで計算された放射能の値を示しています。
次は4行のブロックです。 これはGlonass \ GPSモジュールからの情報の出力です。
最初の行は、UTC時間、日付、衛星の数、ソリューションの計算に使用されたデータ、ソリューションの可用性のサイン(文字AまたはV)です。
095623 140514 08 A-9:56:23 UTC 05/14/2014 8衛星と解決策があります。
2行目は、緯度と速度(km \ h)です。
5545.13119 Nは、北緯55度45.13119分を意味します
3行目の経度
03739.20397 Eは、東経37度39.20397分を意味します
4番目は、マイル/時の速度、移動角度(度)、高さ(メートル)です。
GLONASS \ GPSデータの出力は単純化されています-文字列の一部は変換せずに単に表示されます。
次に、観測中の放射能の最大値が表示されます。
実行中のグラフは、放射能の経時変化を示します。 グラフは、リングバッファの最大値に自動的に調整されます。 コンパスを提示すると、次の図が表示されます。

私は質問に答えてうれしいです。