全地形電動車椅子を作成するプロジェクトについてお話したいと思います。 技術的には、これは単なるベビーカーではなく、本物のロボットです。変身ロボットとも言えます。
このベビーカーはどうあるべきですか?
- ほとんどの障害者は複数のベビーカーを持つことができないため、可能な限り多目的に使用する必要があります。 自宅、路上、森の中を動き回ることができ、階段を登って縁石を自分で登ることができます。 これは、2番目のポイントも意味します。
- ベビーカーの幅は650 mm以下であるため、どの開口部やエレベーターにも電話をかけることができます。 長さは1100 mm以下です。
- 安全です。
- 安い。 ここでコメントは冗長だと思います。
- バッテリーは高価なのでエネルギー効率が良い。
基本的な建設的なアプローチを必要とする主な問題は、もちろん、階段を登ることです。 非常に多くの実装オプションが検討されました。これは、通常の大径の深いトレッドを備えたホイールから、歩行装置に変わるトランスフォーマーホイールにまで及びます。 どこにでも問題がありました:いくつかの解決策は安全ではありませんでした、いくつかのオプションは1種類の階段(特定の高さと深さの階段)などにのみ適していました。 最良の選択肢はキャタピラームーバーでした。
最初のクールな運命のアイデア
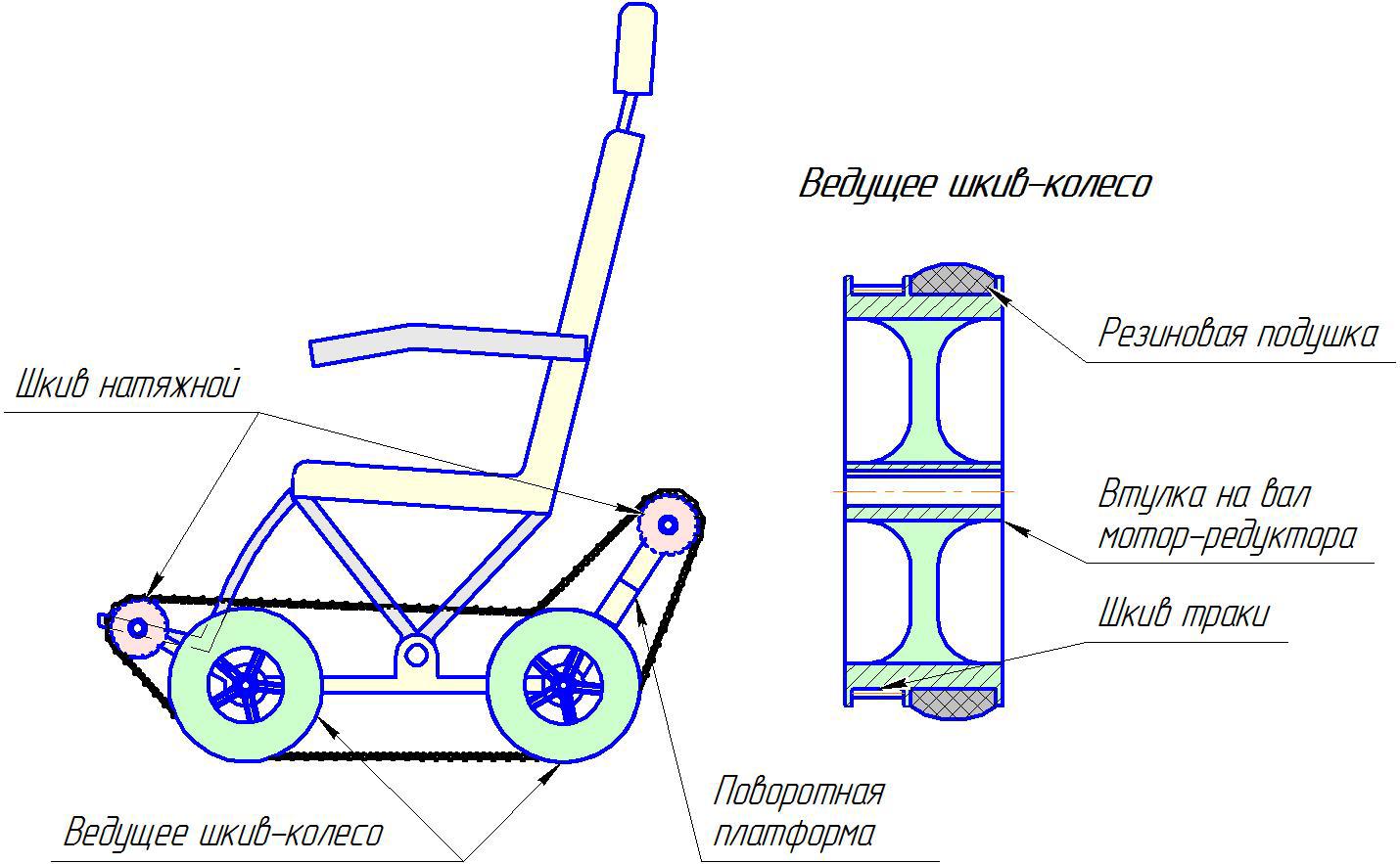
アイデアは次のとおりです。4つのギアモーター(4輪駆動)、回転椅子、回転式後部プラットフォーム、ピンと張ったトラックを備えた4つのプーリーホイール。 プーリーホイールの特徴は、平らな表面ではトラックが地面に触れないため、振動や追加の摩擦が発生しないことです。 ベビーカーは、プーリーホイールのゴム製クッションに乗ります。 また、はしごなどの障害物にぶつかると、トラックはこの同じ障害物に接触します。
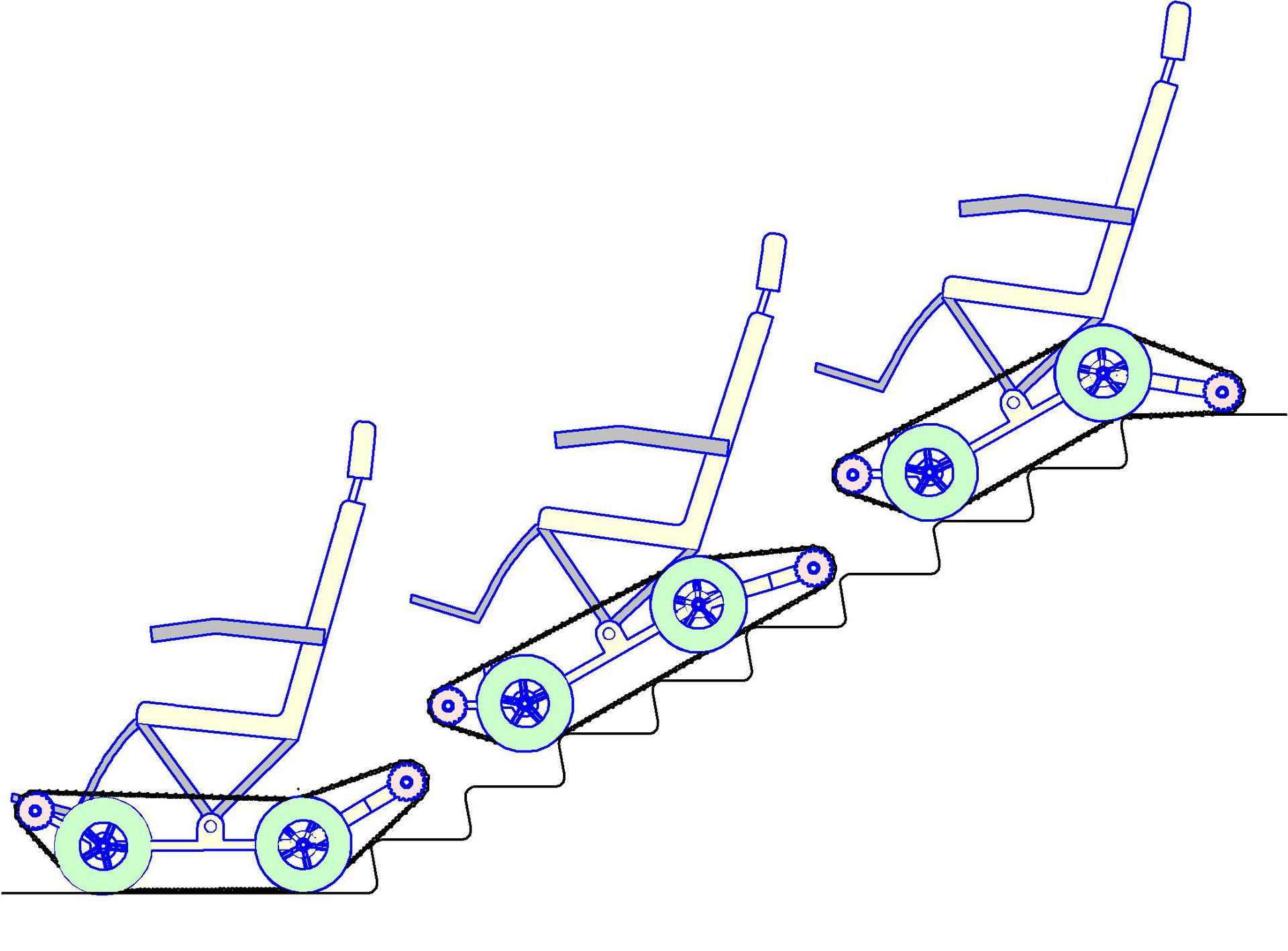
階段の動きは次のとおりです。
- ターンテーブルは、階段に簡単にアクセスできるように下げられています。
- 到着後、後部プラットフォームはメインプラットフォームに沿って下降します。 したがって、キャタピラーベースの全長は、クーデターによる優れた牽引力と安全性を提供します。
- 階段を出ると、突然の落下を防ぐために、後部のプラットフォームが下がります。
持ち上げ中、椅子は自動的に回転し、水平位置を維持します。 階段からの降下は、まったく同じ方法で行われますが、逆の順序で行われます。
最初のプロトタイプの作成
アイデアをテストするために、プロトタイプの作成に取りかかりました。 彼らはこれまで制御電子機器を発明することはせず、他の電動ベビーカーからの2つのリモコンを使用することにしました(それぞれが2つのエンジンを制御します)。 椅子と後部プラットフォームの駆動は、3ポジショントグルスイッチを使用して制御されました。
トラックを作ることはまったく別の話です。 自家製トラックの基本は、インプレッサのタイミングベルトです。 ベルトは縫い合わされています。 Vベルトのセグメントはラグとしてカットされ、セルフタッピングねじで縫われました。

すべてが自分のポケットから資金提供されていたので、レセプションは集団農民によって使用されました。 図面によると、このようなトラックを4台製造するコストは(中国でも)7万ルーブルから始まります。 (製造ツールを含む)。 その結果、自作のトラックは、ベビーカーが乗客なしで階段を登るのに十分でした。 ペイロードから、トラックはジャンクションで壊れました。
最初のプロトタイプの作成には、ガレージワークショップのレンタルを含め、約8万ルーブルがかかりました。
テスト結果によると、次のことが明らかになりました。
- ラグのあるトラックでは、階段を登ることができます。 ステップのサイズが異なり、欠けている場合でも。
- 旋回式後部プラットフォームのアイデアは機能します。
- プーリーホイールの設計は失敗する運命にあります。
主な問題は、階段を登り、平らな表面を移動するために、基本的に異なる速度とモーメントが必要であり、約10倍異なることです。 もちろん、より大きな出力のドライブを取り付けることができます。飛行機で移動する場合、エンジンの負荷は公称値よりもはるかに少なくなり、階段を登る場合、電圧は公称値より低くなります(速度を下げるため)。 このシナリオでは、低コストとエネルギー効率を忘れることができます。
ベビーカー-変圧器。
この問題を解決するためのいくつかのオプションがありました。
- ギアシフトを備えたギアボックスを作成します。 より正確には、4つのギアまたは少なくとも2つのギア(左側と右側)。
- 異なるドライブからトラックとホイールを回転させます。
- 車輪付きベースとトラック付きベースを分離します。 この場合、ホイールとトラックは単一のドライブで駆動され、トラックが縮小されます。
綿密な分析と計算の後、後者のオプションが最も安価で技術的に実現可能であることが判明しました。
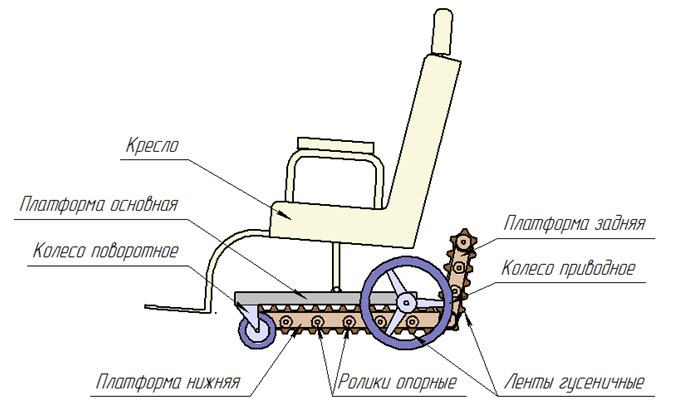
平らな面では、キャタピラーベース(下部および後部)が最も高い位置にあり、ベビーカーの動きを妨げません。 障害物を克服する必要がある場合、下部および後部のプラットフォームが下げられ、ベビーカーがトラックの上に立ちます。 その結果、エンジンシャフトから駆動トラックプーリーへの機械的伝達と、ホイールとプーリーの直径の違いにより、速度とモーメントの10倍の設計を達成することができました。
鉄のアイデアの実現
今回は、より徹底的な方法でプロトタイプの製造にアプローチしました。必要なトラック、Celestial Empireのドライブを注文し、電子機器を購入しました。 ノボシビルスクの企業では、機械加工、レーザー切断、曲げ加工が注文されました。 もちろん、組み立てと溶接は自分たちで行いました。 クラシックスタートアップのようなすべての作業は、ガレージワークショップで行われました。
制御システムは、Bluetoothと通信するリモートコントロールとエグゼクティブモジュールで構成されています。 障害者がジョイスティックを自分で制御できず、同行者がベビーカーを制御する場合は、ワイヤレスリモートコントロールが特に必要です。 はしごを登るとき、アテンダントはジョイスティックの後ろの椅子の腕に手を伸ばす必要はありません。リモコンを手に持って、動きを視覚的に制御します。
水平椅子を維持するための自動システムは、加速度計に基づいています。 システムは高度に動的ではないため、ジャイロスコープを使用せずに数学的計算を減らすことができます。 下部および後部プラットフォームの昇降機構には、フィードバックセンサーがあります。 プラットフォームの位置に関する情報は、リモートコントロールに送信されます。 システムは24 Vゲル電池で駆動されます(将来のバージョンではリチウムイオンを使用します)。
テストは、高層ビルのステップで実行されました。
解決するのに十分な問題がまだあります。 しかし、1つ確かなのは、それが機能することです! 下降プラットフォームを備えた車輪付きキャタピラシステムの開発のために、特許出願が提出されました。 私たちのさらなるアクションは、エレクトロニクスの仕上げ、軌道上の瞬間の増加、最高のエンゲージメントのための軌道プロファイルの変更、そしてもちろん、製品の見栄えの良い外観の作成を目的としています。
この開発の重要性について、ビデオを撮影しました。
これで、障害者に移動の自由を与えることができます。 家、店、映画館、友人やガールフレンドに行く途中の階段の階段は、彼らにとってはささいなことのように思えます。