EPFLの研究者チームによって開発されたロボットアームは、異なる経路に沿って飛行するさまざまな形状のオブジェクトをキャッチできます。
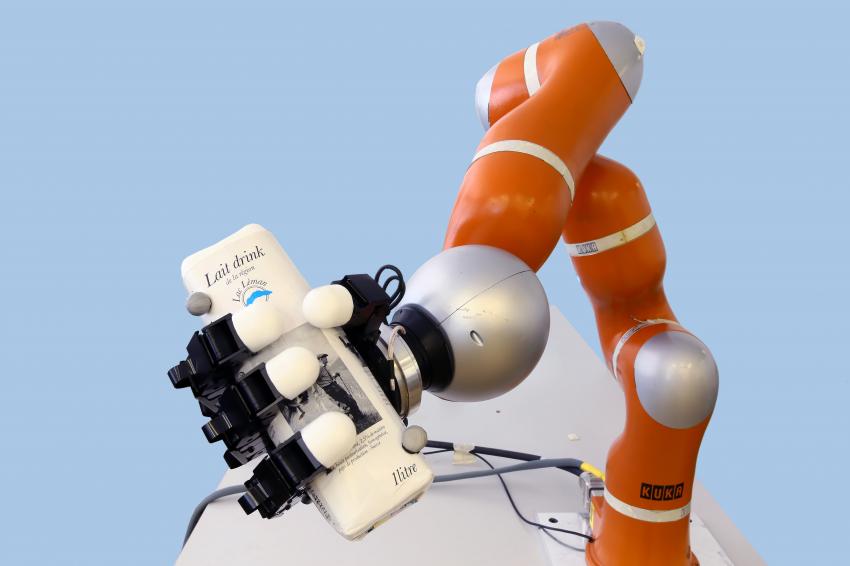
ここで、彼は手のひらを開いたまま動かずに立ち、しばらくして、急にスピンアップし、テニスラケットからボールで終わる、あらゆる方向に投げられたあらゆる種類の飛行物体をキャッチします。 腕は3本の関節と4本の指で構成され、全長は約1.5メートルです。 このロボットのプログラミングは、EPFL研究所-LASA(Learning Algorithms and Systems Laboratory)によって実施されました。 さまざまな不規則な形状のオブジェクトを捕らえることができるという点でユニークであり、0.05秒未満で決定を下します。
私たちの日常生活にはさまざまなタスクを実行するロボットがますます増えており、移動中にオブジェクトを捕まえたり、複雑なオブジェクトをかわしたりできるため、より多くの機能を発揮できます。 LASAのヘッド、オードビラードは言います
このマニピュレーターはすでに宇宙での応用の本当の可能性を持っています。 これは、EPFLのスイス宇宙センターのプロジェクトに直接関係しており、その目的は地球の周りの軌道上のスペースデブリを処理する技術の開発です。 衛星に組み込まれたそのような手は、宇宙で飛ぶ物体を観察しながら、飛ぶ破片を捕らえることができます。
今日、マシンは基本的にデータの変更をすばやく吸収することができません。 したがって、彼らの選択は、軌道を再計算することであり、1秒未満が決定的になり得る状況では、彼らにとって時間がかかりすぎます。 -LASA責任者、オードビラードを追加
予想される反応速度と適応性を得るために、LASAの従業員は、デモによるプログラミングと呼ばれる試行錯誤の方法に似た方法を適用し始めました。 この場合、手は手動で送信され、オブジェクトをキャッチするときに発生するはずの動きを繰り返します。
ボール、空のボトル、ハーフボトル、ハンマー、テニスラケットを捕まえる実験が行われました。 これらの5つの異なるオブジェクトが選択された理由は、ロボットがキャッチする必要のあるオブジェクトの部分(ラケットハンドルなど)がその重心に対応しないさまざまな状況を提供するためです。 ボトルの場合、その重心が飛行中に数回移動するため、追加の問題が発生します。
実験の最初の段階で、オブジェクトはロボットの方向に数回投げられました。 ロボットの周囲にある一連のカメラを通して、彼は飛行物体のモデルを作成し、その飛行経路、速度、回転運動を計算します。 科学者はすべてを、ロボットが正しい方向に非常に迅速に位置を選択できる方程式に変換することができました。 わずか数ミリ秒で、ロボットアームはオブジェクトの軌道をリアルタイムで調整および調整し、高精度で捕捉します。