インテリジェンスのトピックは、その一貫性と混乱のために興味深いものです。 ここでは、多数の異なる概念が1つのパイルに混在しており、何らかの関係があります。 インテリジェンスとは何ですか? そして、それは理由と意識にどのように関係していますか? 同じですか? 潜在意識とは何ですか? 考えることの意味は? 細胞には意識がありますか? サルには心がありますか? カエルの知能とミツバチの知能はどう違うのですか? または彼らは知性を持っていませんか? 100万のそのような質問が発生する可能性があることは明らかです。 したがって、フレームワーク(インテリジェンスとは何か)を定義することは非常に重要であり、したがって、どこにあるか、どこにないかを決定することが重要だと考えています。
インテリジェンス (lat。Intellectusから-認知、理解、理由)、考える能力、合理的な知識など Webでは、多くの類似した定義を見つけることができますが、そこからはほとんど意味がないことが明らかになります。 たとえば、日常的な考えから、犬は知性を持っていると考えることができます。 しかし、彼らが合理的な知識を持っているかどうかは言うのがより難しい。 そして、合理的な知識とは何ですか? 望遠鏡で月を見る? その後、彼らは所有していない...まあ、など テーマフォーラムでの実践に基づいて、私は多くの異なる意見に出くわしました。時には非常に反対の意見もあります。
たとえば、「動物」と「文明」の知性があるという主張がありました。 または、「具象的」および「論理的」な種類の知性。 たとえば、比fig的思考は抽象的ではないことが判明しました。 しかし、サルバドールダリはどうでしょうか。 また、知性を持っているのは人だけであり、すべての動物で「適応行動」だけだと言う人もいます。 多くの人々は、知性=意識=理由を同一視することを好みます。 意識は細胞から始まると考える人もいます。 または、知性は細胞から始まりますが、彼らはこの用語に理解を置きます。 また、潜在意識、意識、超意識があるという理論[シモノフ]もあります。 後者は、ユニットだけが持つことができるような創造的な意識です。 または、たとえば、メカニズム(電子メカニズムを含む)にはインテリジェンスがありますが、犬には「非常に少ない」、犬には「もっと」、人には「非常に」あるという意見があります。 インテリジェンスはどこにでもどこにも存在しないとらえどころのない物質であることがわかります...
先に進む前に、モデルの概念について簡単に説明する必要があります。これは、知性の科学において重要です。
モデル (lat。Modulus-「測定、アナログ、サンプル」)はシステムであり、その研究は別のシステムに関する情報を取得する手段として機能します。ただし、定義を明確にする必要があります。 一般的に、モデルは、紙の船でさえ、何でも理解できます。 それは同じ理論と公式であることができます、それはちょうど異なるタイプのモデルです:物理的、数学的、形式的など。
したがって、私たちの推論では、モデルと「別のシステム」になる場所があります-オリジナル。 主な内容は次のとおりです。
1)モデルはオリジナルよりもはるかに単純です。
2)モデルには、オリジナルの「必須」プロパティが含まれています。
3)それらの「重要性」は、モデルを構築する目的によって決定されます。
目的がなければ、オリジナルの「本質的な」特性を区別できません。つまり、目的がなければモデルは存在しません。 言い換えると、 モデルは目的の観点から見たオリジナルです。 秘trickは、実際のオブジェクトは複雑であるため、そのような視点が多数存在する可能性があり、それらはすべて正しいということです。 したがって、相互接続された3つの概念、つまり、オリジナル、モデル、目的が発生します。 これを覚えて。
簡単な例は、池に住んでいるカエルとそれを食いつくサギが、それぞれの目標を達成するために異なる目標と異なるリソースを持っていることを示しています。 彼らが同じ池の異なるモデルを持っていると仮定することも自然です。 これは、これらのモデルが正しくないことを意味しますか? いいえ、目標も異なるため、そうではありません。 そして、これらのモデルの妥当性の基準は何ですか? 答えは明らかです-目標が達成される度合い:目標がより効率的に達成されるほど、モデルはより適切になります。
さて、インテリジェンスの定義に戻りましょう。その多くは以下で興味深いものです。 インテリジェンスとは、 外界の法則を表示し、それらを使用してその目標を達成するシステムの能力です[Samarin]。 私の意見では、ここで「外の世界の法則を反映する」という表現を明確にし、 「環境の感覚モデルを動的に形成する」に置き換える必要があります。
ここで図1を参照してください。図1は、特定の思考メカニズムの存在に応じて、生物の行動の有効性のレベルのグラフを示しています。 グラフには、ほとんどの自然なプロセスと同様に、急激なしきい値の特徴があります。 明らかに、新しい思考メカニズムの出現後、効率性の飛躍が現れます。
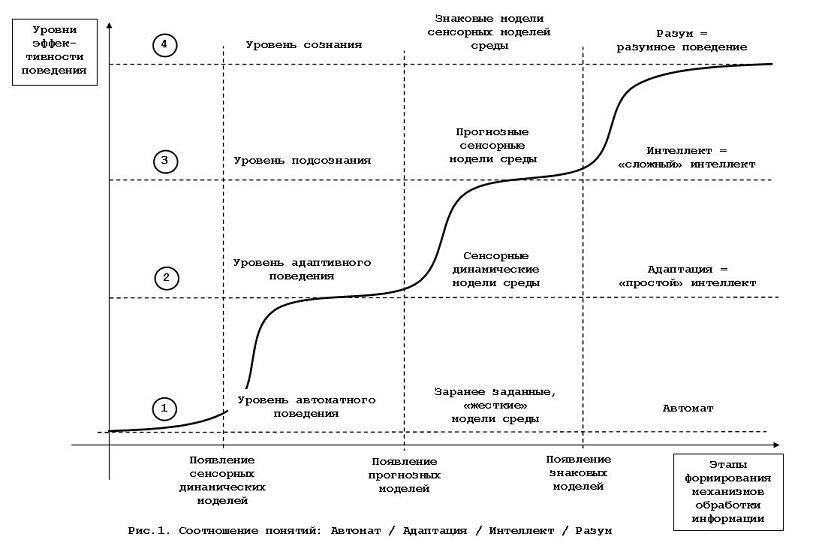
1.オートマトンの動作レベル。 外部条件が変化してもほとんど変化しないか、まったく変化しない「ハードワイヤード」(静的)動作が特徴です。 剛性と低い柔軟性が特徴です。 変更(学習)する能力は弱く、可能性の範囲は限られています。 このレベルの行動は昆虫の特徴です。
2.適応行動のレベルは、環境の感覚モデルの形成の結果として生じます。 これらのモデルは動的に形成されます。 人生の過程で。 このようなモデルを形成するメカニズムはトレーニングです。 適応行動は、「単純な」知能の行動とも呼ばれます。 この行動は両生類と爬虫類の特徴です。
3.潜在意識行動のレベルは、環境の感覚的予測モデルを動的に形成できるメカニズムの出現後に発生します。 機能システムの理論(TFS)[Anokhin]に従って、知能の予後特性はアクションの結果の受容者(ARD)によって提供されます。 これらは「真の」インテリジェンスを備えたシステムとなり、「複雑な」インテリジェンスを備えたシステムとも呼ばれます。 例は、高等哺乳類です。 上記の理由により、細胞や昆虫には「知能」がないと仮定できます。 それは決してなかったし、そうなることもない。
4.意識的行動のレベルは、環境の感覚モデルの象徴的なモデルの出現の結果として生じます。 つまり ラベルはセンサーモデルに「接着」されます。ラベル、またはラベル、またはサイン。その後、センサーモデル自体ではなく、モデルへの参照で操作できます。 サインシステムは、グラフィック、音声、受容的(点字)、手話など、どのようなものでもかまいません。 次に、次のチェーンがあります。
現実世界->タッチモデル->モデルに署名
モデルのモデルは、実世界の複雑なオブジェクトをさらに簡素化し、より効果的に認識できるようにします。 言葉は信号の信号であるというパブロフのよく知られたアイデアは、その結果、人が第二の信号システムを持っているということは、この論理を確認します。
外見は、何らかの形でのスピーチのように見えます。 また、自分の考えや行動が実現されると、合理的な行動の出現や意識の現象につながります。 声を出したり、他の人に説明したりできます。 高等霊長類の実験では、原始意識があることが示されています。 簡単な言語の習得に成功しました。 チャートの最後の「ステップ」の足元にいると言えます。 このため、猫、両生類、ケージには意識がなく、存在することはできません。 上記は簡単に次のように表現できます。
1.(自動動作)<-環境のハード静的モデル
2.(適応=シンプルなインテリジェンス)<-環境の動的モデルに触れる
3.(知能=複雑な知能)<-感覚モデル+ ARD(予測)
4.(マインド=意識)<-感覚モデル+ ARD +サインモデル
このことから、自然言語と人間の思考を理解するという問題を解決することの困難さが明らかになります。 これは、感覚モデリングと感覚予測の段階を無視するためです。 研究者はすぐに、下位レベルのプリミティブに基づいた高機能を取得し、最終的にモデルの階層システムを形成します。 これは、これらのレベルの実装に関する段階的な作業が必要であることを意味し、レベル2と3が非常に重要です。 レベル1の実装は簡単なようです。 したがって、神経生物学、神経解剖学、および精神生理学の分野における思考のメカニズムを理解することの「建設性」に関する既知のデータを考慮することは理にかなっています。 ここで、「思考メカニズム」とは、最も一般的な形式のアーキテクチャ概念を指します。
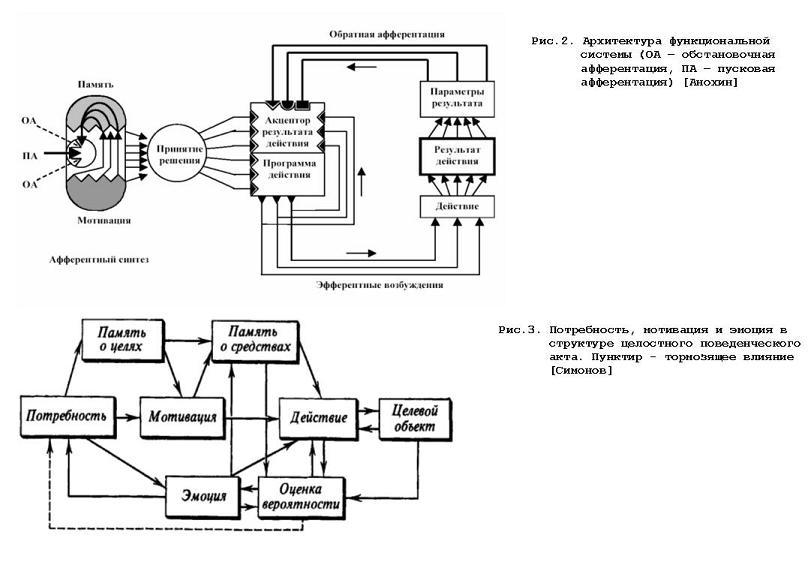

図2は、TFS [Anokhin]のフレームワーク内の機能システムのアーキテクチャとしても知られる動作のモデルを示しています。 図3は、ニーズ、動機、および感情を考慮した行動行為のモデルを示しています[Simonov]。 いくつかの分析は、有名な科学者の両方が、実際にはタイムダイアグラムの形式で動作を描写し、たとえばデジタル回路での慣習的な静的フローチャートの形式ではないことを明らかにしています。 他の同様のスキームがあります。たとえば、図4 [Redozubov]、図5 [Zhdanov]、および他の多くには、あまり明確ではありません。
たとえば、図2に「意思決定」というブロックがある場合、図3および図4にはブロックが存在せず、図3には「感情」ブロックが存在し、図2には存在しません。 「アクションの結果の受容者」、「動機」、「記憶の形成」、「知識ベース」、「アクションの形成」、「パターン認識」などについても同じことが言えます。 したがって、既知の情報源から技術システムのアーキテクチャがどうあるべきかを理解することは不可能であり、たとえば行動の効率レベル2に従って知的機能を実行することができます。 このことから、そのようなアーキテクチャの形成には、考慮される一般的な状況を考慮に入れた工学的アプローチが必要であることは明らかです。
継続する。
中古文学
アレクサンドロフ・ユイ 精神生理学。 サンクトペテルブルク:ピーター、2007年。
アノヒンP.K. 機能システムの一般理論の基本的な質問//機能のシステム編成の原則。 M。:Nauka、1973。
ベリチコフスキーB.M. 認知科学:認知心理学の基礎。 M。:センス、2006。
ダニロバN.N.、クリロバA.L. より高い神経活動の生理学。 M。:教育文学、1997。
Zhdanov A.A. 自律型人工知能。 M。:Binom、2009年。
ルリア・アー 人間のより高い皮質機能。 M .:モスクワ州立大学、1962年。
Redozubov A.D. 感情の論理。 サンクトペテルブルク:アンフォラ、2012年。
サマリンA.I. 移動ロボットと神経構造の自己組織化-レトロスペクティブビュー//行動モデルから人工知能まで。 エド。 V.G. Redko。 M。:URSS、2006年。
シモノフP.V. 感情的な脳。 M。:ナウカ、1981年。
スダコフK.V. 生理学。 基本システムと機能システム。 M。:医学、2000年。
ターチンV.F. 科学の現象:進化へのサイバネティックアプローチ。 M。:ETS、2000。
フーベルD.目、脳、視覚。 M。:ミール、1990。
シュビルコフV.B. 客観的心理学入門:精神の神経基盤。 M。:心理学研究所RAS、2006年。
アシュビーU.R. 脳の構築。 M。:外国文学、1962年。