過去数年にわたって、Festoは、トンボ ロボット、カモメロボット、 新しいタイプの風力発電機など、多くの興味深いプロジェクトを作成してきました。
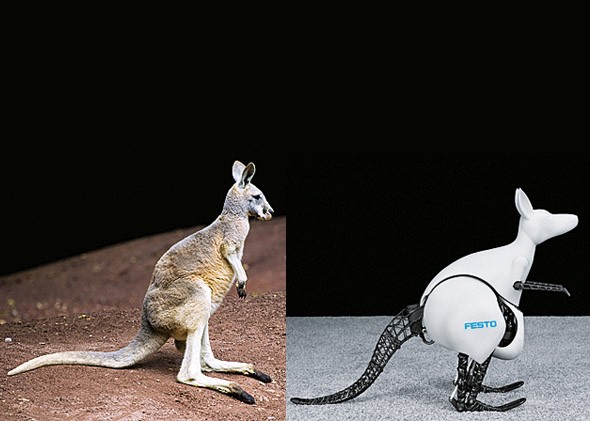
先日、同社はカンガルーのロボットBionicKangarooという新しいプロジェクトを導入しました。 このロボットは、...カンガルーのように...ジャンプするように訓練されています。 なぜカンガルーですか? 実際、これらの動物はジャンプするときに自分の体を非常に効果的に使用し、開発者は実際の動物と同じ原理でジャンプできる機械的な生き物を作成することにしました。
もちろん、カンガルーロボットはカンガルー動物ほど優雅に動きませんが、原理は同じように使用されます。 そして、最小限のエネルギーを使用して、ロボットの動きは非常に効果的であると言わなければなりません。
ロボットの設計では、空気圧モーターと電気モーターを組み合わせて使用します。 カンガルーの尾と足の動きを制御する特別なモーター。 さらに、ロボットには動物のような小さな前足の「足」があります。 これらの足と尾は、適切なバランスを維持するのに役立ちます。
ちなみに、開発者はカンガルーロボットの爪に人工の「腱」が存在することを確認しました。 ジャンプ中、ゴム製のこれらの腱はショックアブソーバーの役割を果たし、さらに、次のジャンプに使用される運動エネルギーを蓄積するのに役立ちます。