
アジェンダの第2部では、次のことを行います。
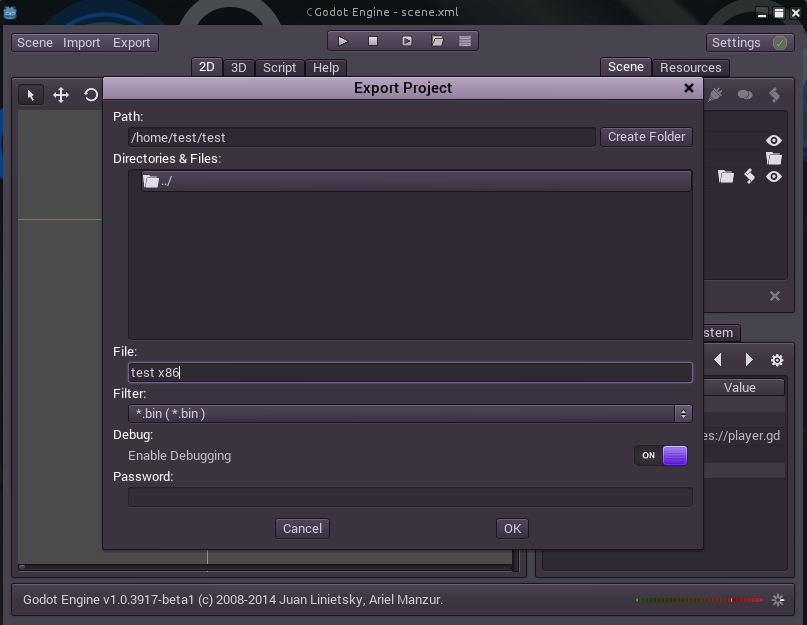
1)完成したプロジェクトを選択したアーキテクチャのバイナリファイルにエクスポートします。
2)新しいアニメーション。 文字オプション。
3)管理。
3)GDScript。 本物のコーディングへようこそ!
4)シンプルなタイルセットをインポートします。
5)ボーナス:最も単純な背景のデバイスの分析。
まあ、いつものように、たくさんの写真!
コンパイル....?
前回の記事で、著者はLinux x86用のバイナリを提供しなかったと述べました。 執筆時点では、バイナリはまだ準備ができていませんでした。 しかし、完成したプロジェクト、デモ、または単にテストをエクスポートしたかったのです。 しかし、エクスポートテンプレートがない場合はどうなりますか? そう! 自分でコンパイルしてください!
ソースファイルがあるディレクトリに移動してコンパイルします
cd ./godot
デバッグツール:
scons bin/godot target=release_debug tools=no
コンパイルが成功したら、新しく受信したファイルの名前をlinux_x11_32_debugに変更します
エクスポートテンプレート自体:
scons bin/godot_rel target=release tools=no
linux_x11_32_releaseに名前を変更
zipアーカイブにパックします。
find ./* -name "linux_x11_32_*" -exec zip ./linux_x11_32_templates.zip "{}" +
Godotアーカイブをフィードします。 これで、あらゆる容量のGNU / Linux OSのプロジェクトをエクスポートできます。
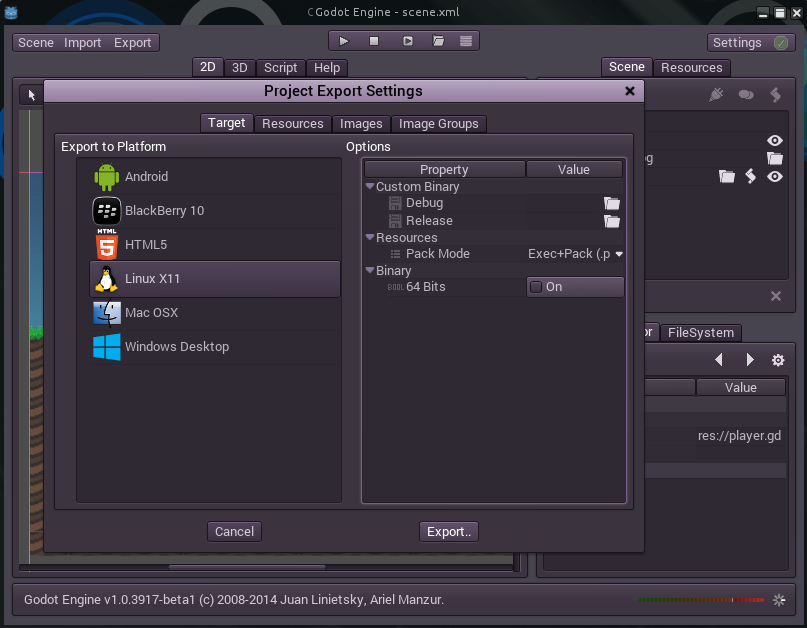
はい、OSおよびあなた以外のビット深度でもです。 Windows用のバイナリを問題なくワインに入れることができました。主なことは、64ビットのチェックを外したりチェックしたりすることを忘れないことです。
エクスポート設定の詳細については、プロジェクトのWebサイトで英語で読むことができます。 関連性があり、需要がある場合は、ロシア語の記事のローカライズとGodotによるロシア語のwikiの作成について考えることができます。
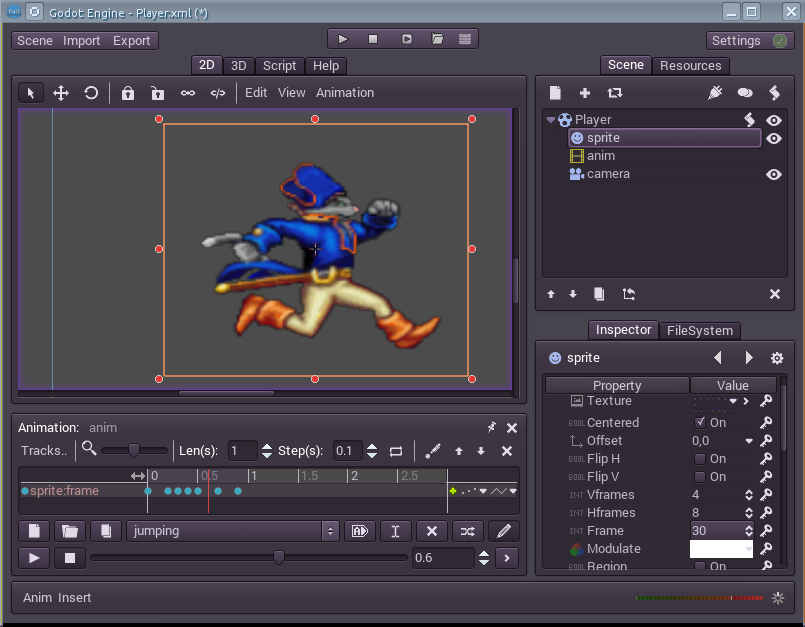
アニメーションの実行とジャンプ
最後のレッスンでは、キャプテンの走りとジャンプのスプライトでテクスチャを事前に準備しました。 したがって、ジャンプして実行する2つのアニメーションを作成することは難しくないと思います。 難しいことではないと思います。 パラメーターのみを言います:
run: Len(s): 0.9 Step(s): 0.1 Looping: yes jumping: Len(s): 1 Step(s): 0.1 Animation: ○○○○○○○ , - 24 30, - . Looping: no
はい、ジャンプは単なるジャンプです。 したがって、より多くの秋のアニメーションが必要です。
falling: Len(s): 0.1 Step(s): 0.1 Animation: №30 Looping: yes
キャラクターオプション
3つのポイント:
- カメラ
- 地面に触れる
- キャラクタージオメトリ
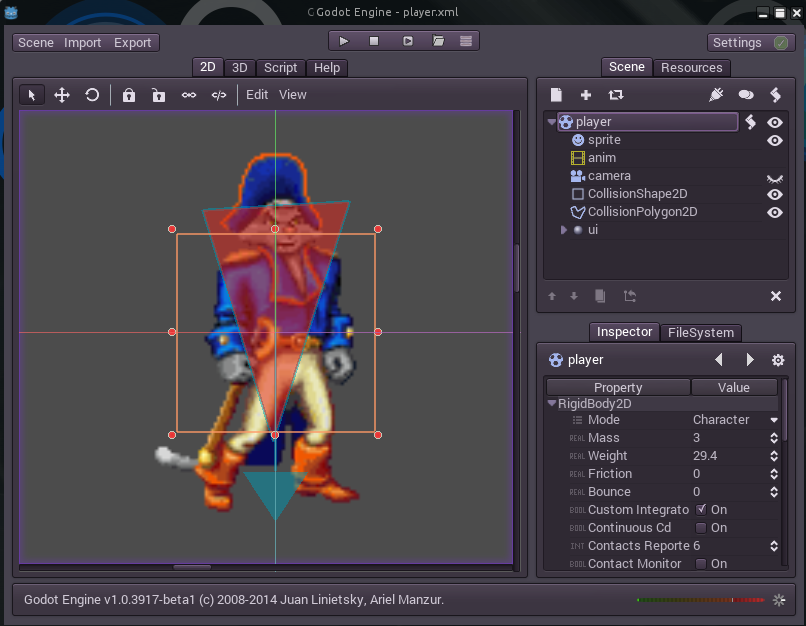
1)思い出させます。 Camera2D / Currentパラメーターにチェックマークがあるかどうかを確認します。これは、カメラオブジェクトをプレーヤーオブジェクトにバインドする役割を果たします。
2)Node CollisionShape2Dを追加します。 この「Noda」は、2D空間でのキャプテンの位置を担当します。

インスペクターで、CollisionShape2D-> Shape-> New RayShape2Dを選択します。 右に2ミリメートルのところに小さな矢印が表示されます。クリックすると、RayShape2Dパラメーターが開きます。
パラメーターRayShape2D /長さ20のままにしますが、カスタムソルバーバイアスは0.5に設定します(これによりわずかなバイアスが可能になります)
将来のゲーム自体では、キャラクターが「床に蹴られない」場合、この矢印で位置を調整できます。 スプライトが床に触れているかどうかを確認するのは彼女です。
3)ジオメトリをもっと楽しく。 最初に、Node CollisionPolygon2Dを追加する必要があります。 次に、この同じポリゴンを描画する必要があります。これにより、キャラクターに「質量」が与えられます。つまり、ヒーローが壁と衝突したときに「壁にぶつかる」ものを描画する必要があります。 それ以外の場合は、単に壁を通過します。
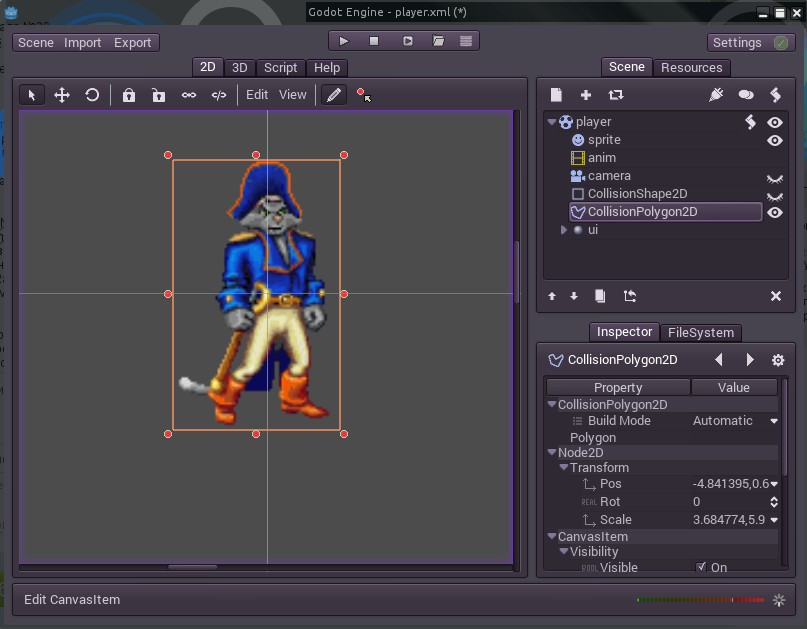
鉛筆を選択してください。 次に、三角形の3つの頂点を「設定」して左クリックします。 各肩に2つ、腹部に1つ。 そして、右クリック(作業領域をクリックするだけ)で三角形を描きます。 最終的には二等辺または等辺であることが判明することが望ましい。 y軸の一番下の頂点で、それを増やします。 少し。 それ以外の場合、キャラクターは天井を通過します。
完了、私たちのキャラクターはブロックヘッド対応です。 今、最も簡単なことは管理です。
管理キーの作成
- 標準管理。
これを作成するのはとても簡単です。 シーンに移動->プロジェクト設定->入力マップ
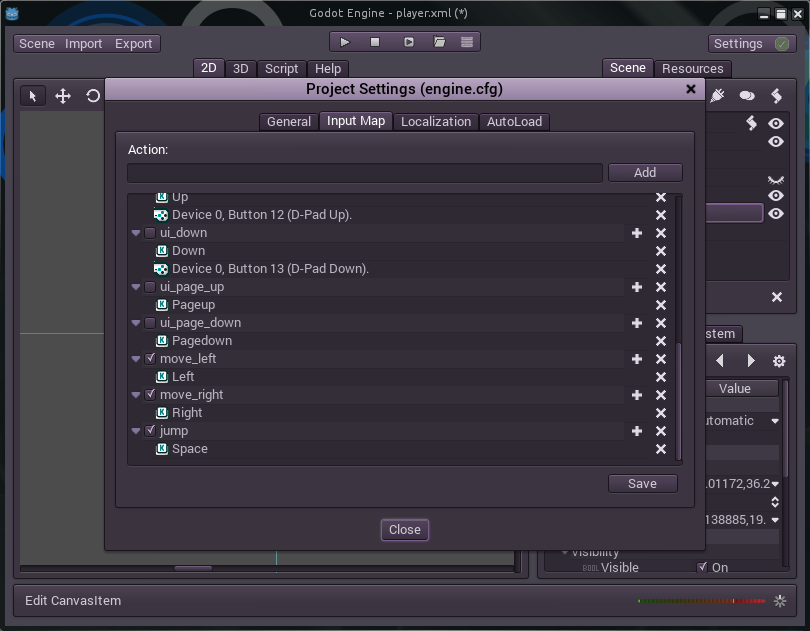
3つのコントロールキー(move_left、move_right、およびjump)を作成します。 それらにキーを割り当てます。 できた!
ご覧のとおり、Godotはゲームパッドでも動作しますが、誰でも独自のコントロールを設定する必要があります。 しかし、これについては改めて。
- タッチスクリーンによる管理。
特に複雑なこともありません。 「ui」という名前のヒーローノードCanvasLayerにバインドします。 そして彼女に、順番に-TouchScreenButtonの3つのコピー。 それらを左、右に呼び出してジャンプします。
それぞれにキー画像を添付します。 プログラムのワークスペースにすぐに表示されます。 より便利であるように私たちはそれを整理します。 青いウィンドウが「カメラ表示エリア」であることを忘れないでください。
[アクション]セクションで、パラメーターmove_left、move_right、およびjumpをそれぞれ入力します。 さて、TouchScreen OnlyでVisibility Modeパラメーターを設定します。 できた!
Gdscript
ここで私は少し愚かです。 実際のところ、プログラマーは正直なところそれほど正直ではありません。 私はあまり理解していません。 そして、この問題をよりよく理解するためにPythonに関する本を読みました。 GDScriptは非常によく似ているためです。
注意!
- エンジンはキリル文字を理解しません。 しかし、誤って何かを書いた場合、彼はそれを表示しません。 行全体に1つの大きな間違いとしてマークするだけです。
- インデントは非常に重要です。 インデントがそこにありません-そして、ヒーローは床に落ちるかもしれません、間違った機能が実行されるかもしれません。
- 繰り返しますが、私はプログラミングの初心者ですが、できるだけ簡単にすべてを説明しようとします。
小さなリクエスト-あなたがそれをより良く配置する方法を知っているなら-書いてください。 すべてのコメントを考慮に入れてうれしいです。
最も単純なアニメーションを表示するための以前のコードを思い出させてください:
何だった
extends RigidBody2D var anim="" func _integrate_forces(s): var new_anim=anim new_anim=«idle» if (new_anim!=anim): anim=new_anim get_node(«anim»).play(anim)
コードを追加および変更します。
変数を宣言する
extends RigidBody2D var anim="" # var siding_left=false # var jumping=false # var stopping_jump=false # var WALK_ACCEL = 800.0 # var WALK_DEACCEL= 800.0 # var WALK_MAX_VELOCITY= 800.0 # var GRAVITY = 900.0 # var AIR_ACCEL = 200.0 # var AIR_DEACCEL= 200.0 # ( ) . , Mario Bros' var JUMP_VELOCITY=460 # var STOP_JUMP_FORCE=900.0 # var MAX_FLOOR_AIRBORNE_TIME = 0.15 # , . - , . , "" . var airborne_time=1e20 # var floor_h_velocity=0.0
integration_forces関数を開始します。 ヘルプのいくつかの言葉は次のとおりです。
物理相互作用を使用するように関数を変更します。 それが私たちがやることです。
PSコードについてさらにコメントする方法がわかりません。 したがって、次のようにしてください。
相互作用関数を書く
func _integrate_forces(s): var lv = s.get_linear_velocity() var step = s.get_step() var new_anim=anim var new_siding_left=siding_left
制御を得ます
var move_left = Input.is_action_pressed("move_left") var move_right = Input.is_action_pressed("move_right") var jump = Input.is_action_pressed("jump") # x () lv.x-=floor_h_velocity floor_h_velocity=0.0
アース検索(床とのテクスチャの接触を確認)
var found_floor=false var floor_index=-1 for x in range(s.get_contact_count()): var ci = s.get_contact_local_normal(x) if (ci.dot(Vector2(0,-1))>0.6): found_floor=true floor_index=x if (found_floor): airborne_time=0.0 else: airborne_time+=step #, var on_floor = airborne_time < MAX_FLOOR_AIRBORNE_TIME
ジャンププロセス
if (jumping): if (lv.y>0): # ( ) jumping=false elif (not jump): stopping_jump=true if (stopping_jump): lv.y+=STOP_JUMP_FORCE*step
地球上のキャラクターの動き
if (on_floor): if (move_left and not move_right): if (lv.x > -WALK_MAX_VELOCITY): lv.x-=WALK_ACCEL*step elif (move_right and not move_left): if (lv.x < WALK_MAX_VELOCITY): lv.x+=WALK_ACCEL*step else: var xv = abs(lv.x) xv-=WALK_DEACCEL*step if (xv<0): xv=0 lv.x=sign(lv.x)*xv # if (not jumping and jump): lv.y=-JUMP_VELOCITY jumping=true stopping_jump=false # if (lv.x < 0 and move_left): new_siding_left=true elif (lv.x > 0 and move_right): new_siding_left=false if (jumping): new_anim="jumping" elif (abs(lv.x)<0.1): new_anim="idle" else: new_anim="run"
空中でのキャラクターの動き
else: if (move_left and not move_right): if (lv.x > -WALK_MAX_VELOCITY): lv.x-=AIR_ACCEL*step elif (move_right and not move_left): if (lv.x < WALK_MAX_VELOCITY): lv.x+=AIR_ACCEL*step else: var xv = abs(lv.x) xv-=AIR_DEACCEL*step if (xv<0): xv=0 lv.x=sign(lv.x)*xv if (lv.y<0): new_anim="jumping" else: new_anim="falling"
キャラクターの動き
if (new_siding_left!=siding_left): if (new_siding_left): get_node("sprite").set_scale( Vector2(-1,1) ) else: get_node("sprite").set_scale( Vector2(1,1) ) siding_left=new_siding_left
アニメーションを変更する
if (new_anim!=anim): anim=new_anim get_node("anim").play(anim)
対地速度を適用する
if (found_floor): floor_h_velocity=s.get_contact_collider_velocity_at_pos(floor_index).x lv.x+=floor_h_velocity
このすべての混乱に重力を適用する
lv+=s.get_total_gravity()*step s.set_linear_velocity(lv)
くそー、それは恐怖でした。
コメントなしですべて一緒になりました:
extends RigidBody2D var anim="" var siding_left=false var jumping=false var stopping_jump=false var WALK_ACCEL = 300.0 var WALK_DEACCEL= 300.0 var WALK_MAX_VELOCITY= 400.0 var GRAVITY = 900.0 var AIR_ACCEL = 300.0 var AIR_DEACCEL= 300.0 var JUMP_VELOCITY=460 var STOP_JUMP_FORCE=200.0 var MAX_FLOOR_AIRBORNE_TIME = 0.15 var airborne_time=1e20 var floor_h_velocity=0.0 func _integrate_forces(s): var lv = s.get_linear_velocity() var step = s.get_step() var new_anim=anim var new_siding_left=siding_left var move_left = Input.is_action_pressed("move_left") var move_right = Input.is_action_pressed("move_right") var jump = Input.is_action_pressed("jump") lv.x-=floor_h_velocity floor_h_velocity=0.0 var found_floor=false var floor_index=-1 for x in range(s.get_contact_count()): var ci = s.get_contact_local_normal(x) if (ci.dot(Vector2(0,-1))>0.6): found_floor=true floor_index=x if (found_floor): airborne_time=0.0 else: airborne_time+=step var on_floor = airborne_time < MAX_FLOOR_AIRBORNE_TIME if (jumping): if (lv.y>0): jumping=false elif (not jump): stopping_jump=true if (stopping_jump): lv.y+=STOP_JUMP_FORCE*step if (on_floor): if (move_left and not move_right): if (lv.x > -WALK_MAX_VELOCITY): lv.x-=WALK_ACCEL*step elif (move_right and not move_left): if (lv.x < WALK_MAX_VELOCITY): lv.x+=WALK_ACCEL*step else: var xv = abs(lv.x) xv-=WALK_DEACCEL*step if (xv<0): xv=0 lv.x=sign(lv.x)*xv if (not jumping and jump): lv.y=-JUMP_VELOCITY jumping=true stopping_jump=false if (lv.x < 0 and move_left): new_siding_left=true elif (lv.x > 0 and move_right): new_siding_left=false if (jumping): new_anim="jumping" elif (abs(lv.x)<0.1): new_anim="idle" else: new_anim="run" else: if (move_left and not move_right): if (lv.x > -WALK_MAX_VELOCITY): lv.x-=AIR_ACCEL*step elif (move_right and not move_left): if (lv.x < WALK_MAX_VELOCITY): lv.x+=AIR_ACCEL*step else: var xv = abs(lv.x) xv-=AIR_DEACCEL*step if (xv<0): xv=0 lv.x=sign(lv.x)*xv if (lv.y<0): new_anim="jumping" else: new_anim="falling" if (new_siding_left!=siding_left): if (new_siding_left): get_node("sprite").set_scale( Vector2(-1,1) ) else: get_node("sprite").set_scale( Vector2(1,1) ) siding_left=new_siding_left if (new_anim!=anim): anim=new_anim get_node("anim").play(anim) if (found_floor): floor_h_velocity=s.get_contact_collider_velocity_at_pos(floor_index).x lv.x+=floor_h_velocity lv+=s.get_total_gravity()*step s.set_linear_velocity(lv)
PS重力が機能するには、[シーン]-> [プロジェクト設定]-> [Physics2D]-> [デフォルトの重力]ボックスをオンにする必要があります。
TileSetsをインポートする
タイルセットについて詳しく話す時間はありません。 完成したシーン(プロジェクトから)のみを提供するか、TileSetから独自のシーンを作成できます。 以下のリンクからセットをダウンロードして、Node TileMapプロジェクトに追加できます。 設定で、完成したTileSetを追加する必要があります(TileSet-> Load-> tileset.xml)。 最も簡単な床/地面を描くことができます。 レベルの描画方法、TileSets次のレッスンで詳しく説明します。
ボーナス! 背景を追加します!
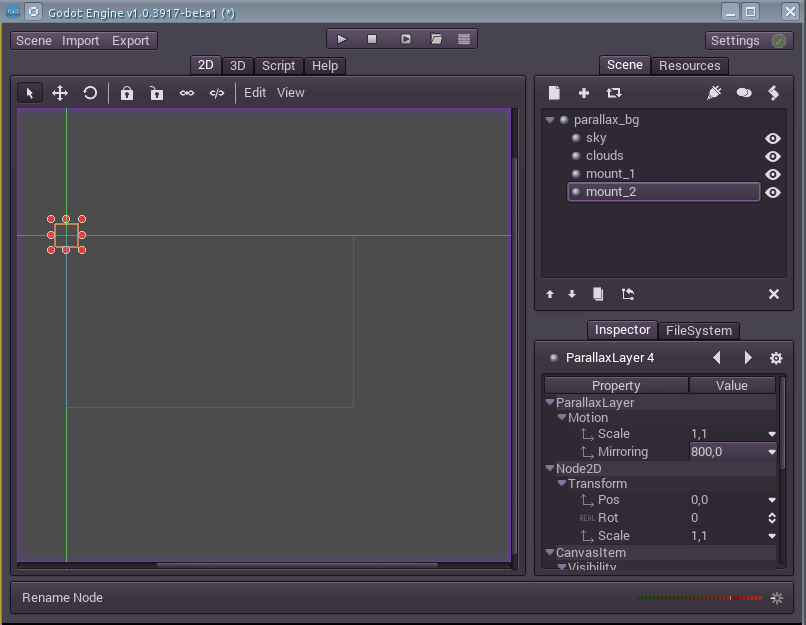
新しいシーンを作成します。 「ノード」ParallaxBackgroundを追加します。 parallax_bgという名前を付けて、parallax_bg.xmlとして保存します。
4つのParallaxLayerを作成します。 それらをsky、clouds、mount_1、mount_2と呼びます。 したがって、空、雲、山。
ゲームの解像度は800x600です(シーンを見る->プロジェクト設定->ディスプレイ設定)。 そのため、各「ノード」にミラーリングパラメーター800.0を設定し、Y軸に沿ってミラーリングします。「ノード」クラウド、mount_1、mount_2のスケールパラメーターを0.1.1に変更します。 それぞれ0.2.1と0.4.1。
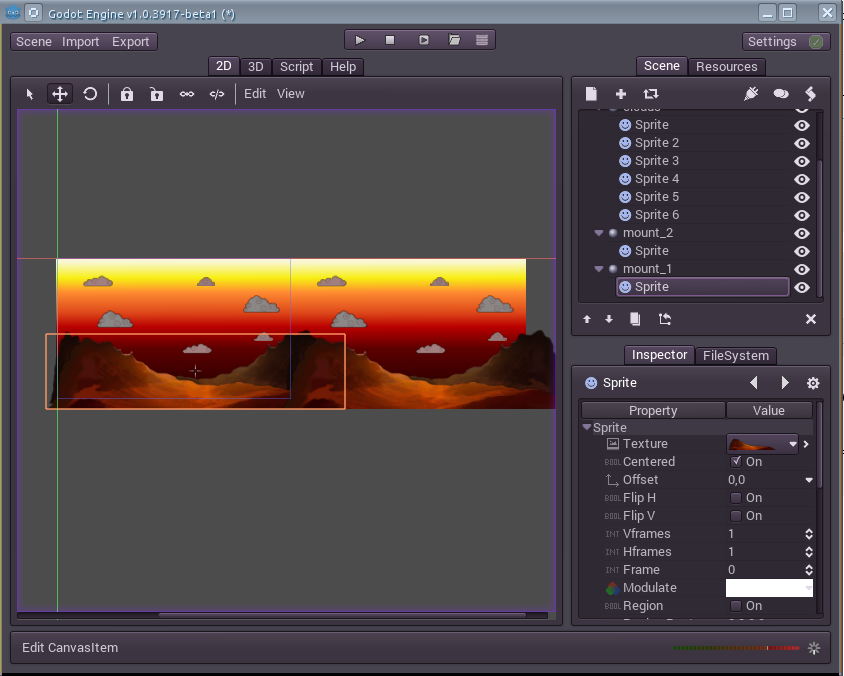
スカイスプライトをノードスカイに追加します。 事前に自分で描いています。 また、以下のリンクからすべてをダウンロードできます。
すぐに、作業領域に2つのストリップが現れました。 画像の作業領域に拡大縮小します。 メインスプライトを変更すると、そのミラーイメージも変更されることがわかります。
ノードクラウドにクラウドを追加します。 3つそれぞれを複製して、最終的に6つ、ミラーが再び複製され、合計で12の雲ができるようになると思います!
次に、ノードmount_1およびmount_2に山を追加します。 しかし、mount_1の上にmount_2レイヤーを上げましょう。
シーンを保存します。 stage.xmlを開きます。 そして、ステージに「プラス記号」を通して背景のあるシーンを追加します。
そしていつものように、ゲームプレイの小さなビデオ:
小さなFAQ(更新されます):
- キャラクターが動かない場合は、キーが追加され、正しく追加されているか確認してください
- アニメーションの問題-アニメーションが正しく追加されたかどうか。 アイドル、実行、落下のループアニメーションを確認してください。
- キャラクターは床に落ち、壁、天井を通り抜けます-三角形のCollisionPolygon2Dを増やします。
- テクスチャの一部/テクスチャの上-矢印CollisionShape2Dを使用して作業する
ダウンロード:
-
 プロジェクトソース
プロジェクトソース -
 バック(zip)
バック(zip) -
 Linux x86用のコンパイル済みエクスポートテンプレート(zip)
Linux x86用のコンパイル済みエクスポートテンプレート(zip) -
 Linux x86レッスンデモバイナリ
Linux x86レッスンデモバイナリ - Linux amd64レッスンデモバイナリ
-
 Windows x86レッスンデモバイナリ
Windows x86レッスンデモバイナリ - Windows Demo x86_64バイナリ
-
 MacOS x86レッスンデモバイナリ
MacOS x86レッスンデモバイナリ - MacOS amd64レッスンデモバイナリ
最後まで習得して読んでくれてありがとう。 欠点がある場合は、PMに連絡してください。 ありがとう、じゃあね!