背景
こんにちはハブラ 電動スライダーでビデオを見た後、私はskolkhozitと自分自身にそのような奇跡を望んでいました。 スライダー自体は昨年の夏に友人と組み立てられましたが、当時は彼らもエンジンを固定したかったのですが、残念ながら手が届きませんでした。 いくつかのタイムラプスを削除すると、モーターがなければ、これはすべて退屈で落ち込んでいることに気付きました。 しかし、休暇は終わり、すべてが長い箱の中に押し込まれました。
エンジンの選択と購入。 試行錯誤
最初は、古いケノフスキーMFP-shkiのバイポーラステッピングモーターを適合させたいと考えていました。歩行者は、紙だけでなくスキャナーでも、ドライブの上に立っていました。 Arduinoを介してそれらを接続し、ファームウェアなどをすべて入力することは可能です...しかし、このトピックについて少しグーグルで調べ、専門のフォーラムで相談した結果、Arduinoでのビルドは「ハエに銃を撃つ」ことと同じであることに気付きました。
エンジン速度を調整できるサーボドライブとテスターを購入することが決定されました。 ドライブの電源は4.8Vから6Vで、テスターも同様に私にぴったりです。 急いで、SM-S4306Rサーボとテスターを注文しました。 そして、彼が急いだのは、完全にプラスチックでできているギアボックスにどんな種類の負荷がかかるのか考えていなかったからです。 到着したドライブはチェックされ、家に持ち帰られました。 翌日、その機能を試してみたいと思いました。文字通り4本のAA三洋エネループAAバッテリーからドライブに電源を接続すると、何かが彼の内部にぶつかり、臭いがしました。それは悪臭を放つ。 わかった
デッドドライブを受け入れて、次のパラメーターを備えた2つのFutaba T306 MG995サーボを注文しました。
複列玉軸受
寸法:40mm x 19mm x 43mm
重量:55g
作業速度:0.17秒/ 60度(4.8無負荷)
作業速度:0.13秒/ 60度(6.0V無負荷)
トルク:4.8Vで13 kg-cm
トルク:6Vで15 kg-cm
動作電圧:4.8-7.2V
このドライブで最も注目すべきことは、すべてのギアが金属でできていることでした。これはまさに私の仕事に必要なものでした。 後で判明したように-15 kg / cmはまったく不要ではありませんでした。
そして、テスターを備えたサーボ自体は次のとおりです。

素晴らしい。 再び差し込むだけです。 結局のところ、これらのドライブには2つの変更があります。 1つの180°と360°。 さて、あなたはそれを得るでしょう? 当然、私は180°を得ました。 それでは...
180°ドライブを360°ドライブに変える
グーグルで調べたところ、このサーボにハッキングがあり、文字通り10〜15分かかることがわかりました。 誰でも構いません-以下のビデオをご覧ください。ただし、すぐにすべてが語られ、非常に長い間表示されます。 しかし、アメリカ人にとっては、これは説明しなければなりません。 ビデオは震えている手で撮影された、明らかにそのアメリカ人の息子。
全体のポイントは、エンジン位置センサーをオフにし、代わりに2つの2.2kΩ抵抗器をはんだ付けする必要があるということです。 また、1つのギアからピンを見た/引き出します。
MG995をハックする:
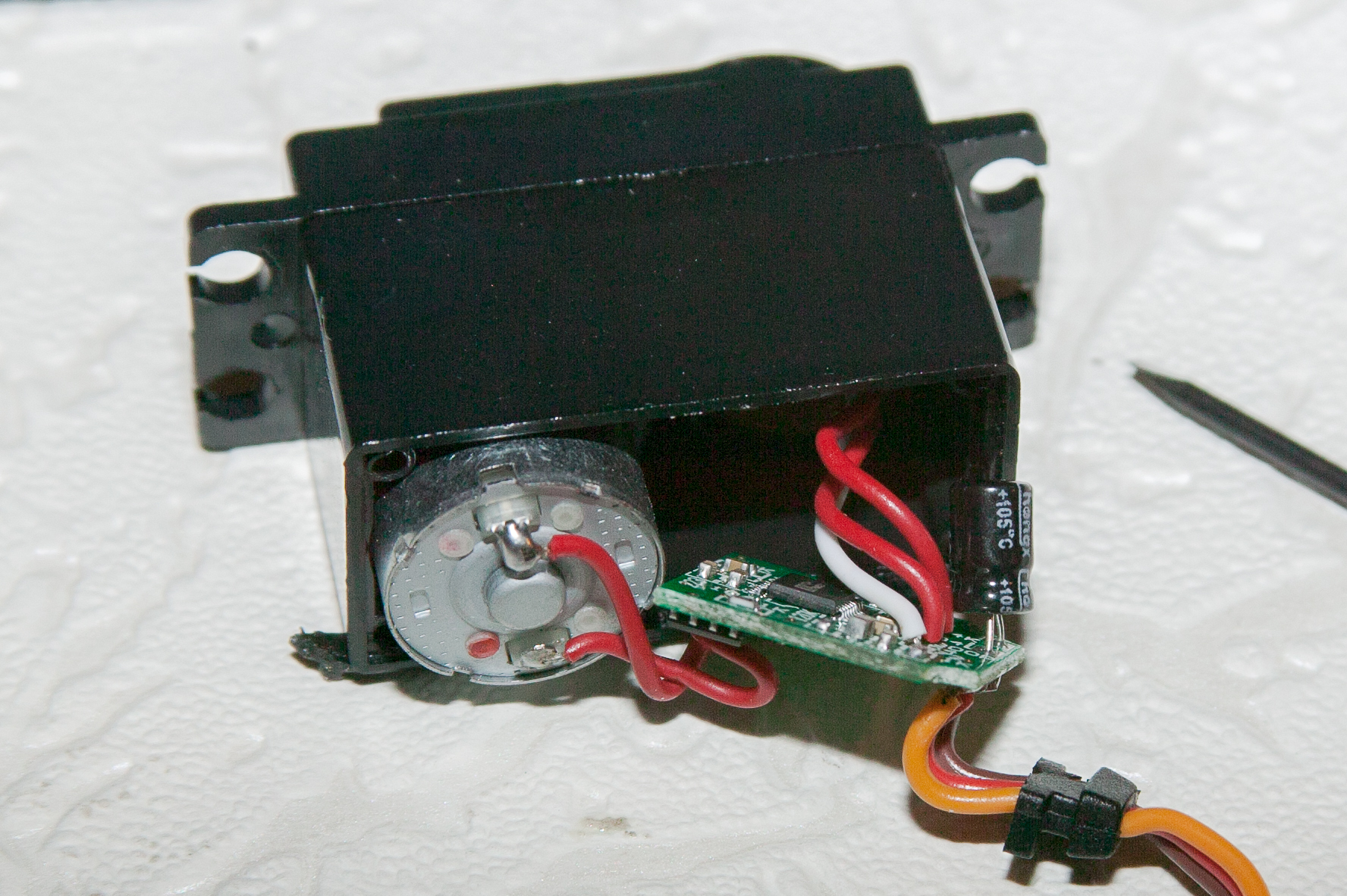
アクションのガイドを受け、私はサーボを回し始めました。 最初のステップは、写真の下部にあるギアのピンを取り外すことでした。 出せませんでしたが、すぐにエメリーで見ました。

プラスチック製のインサートがそこから取り外され、エンジン位置センサーがねじれました。

それで...メカニカルパーツが終わった。

それは電気のものをねじ込む時間です。 モーター位置センサーには、抵抗器を取り外してはんだ付けする必要がある3つのピンがあります。 抵抗器を2.2 kOhmにした後、テスターはドライブを一方向にのみ回転させ始めたとすぐに言います。 抵抗器を2.2ではなく5 kOhmに配置したので、私はテスターの反転能力を返しました。 写真には別の2.2 kOhmがあります。

スライダー
ドライブの変更が終わり、スライダーにマウントすることにしました。 残念ながら、スライダー自体の製造プロセスの写真はハードドライブで死にましたが、私はそれを明確に見せようとします。
アセンブリのために、私の友人と私は使用しました:
スライディングワードローブ用のベアリング上の2セットのポーランドホイール。
スライド式ワードローブ用の3メートルのアルミニウムレール。
4つのスチールアングル90°;
4平方メートルのアルミニウムプロファイル2x2 cm。
プロファイルを取り付けるための3つのスラットとキャリッジ用の1つの大きなスラット。
20-25ネジ;
黒いペンキでスプレー缶。
三脚の頭として、ビデオ三脚の頭はねじれていました。

ガイドのホイール(底面図):


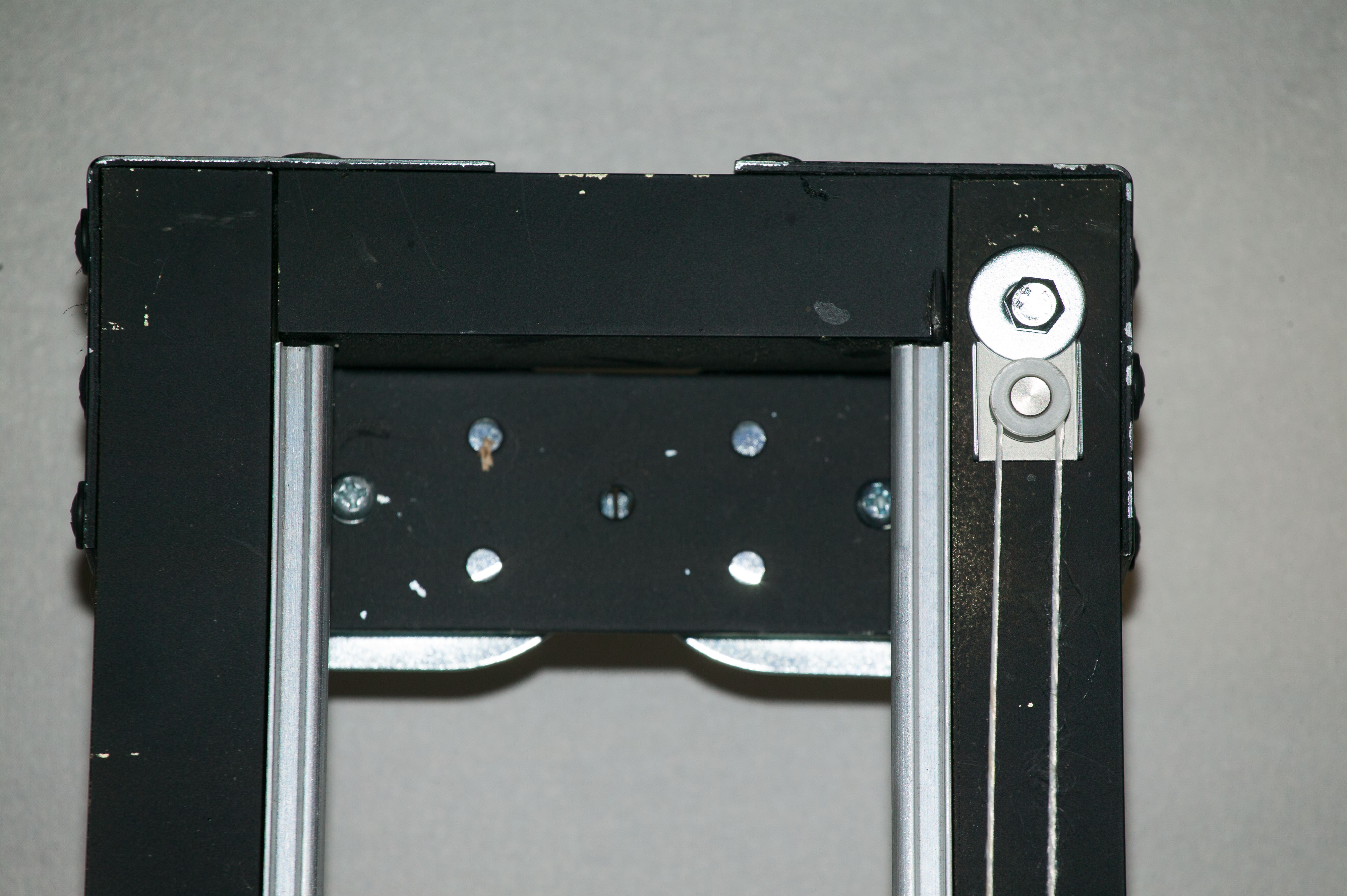
電池用の箱がextからの箱として使用されたように。 プレーヤーの力。


完全な長さ。

これは、カメラ付きのスライダーが45°に見える方法です(電話から取得した品質は申し訳ありません):

サーボのパワーに関しては、予想よりもさらに強力であることが判明しました。 レンズとフラッシュを搭載したカメラは、ほぼ垂直に取り付けられたスライダーの上で静かに立ち上がります。
まとめ
結果は次のとおりです。 速度を最大にしたので、最後のビデオは加速しています。 また、タイマーをテスターに固定することも計画されており、テスターは指定された時間が経過するとキャリッジを移動します。
私を助けてくれたすべての人に感謝します。 特にジュレとスヴァバン
UPD。 約束どおり、彼は気象条件でもう少しビデオ戦利品を撃ちました。 雨と強風が通りに降り注いだため、水滴が見えます。 露出は1秒、フレーム間-5秒です。 f22(NDフィルターがまだ取得されていないため)。