「...リプリー氏が私たちを中庭に連れて行って、家に向かって言ったら、「スタンド、家、ニューヨークに戻り、私に向かいます」と言ったら、家は鶏の足の小屋のように、これを実行していました電気によるリクエストであり、私たちもそれほど驚かないでしょう。」
イルフとペトロフ。 1階建てのアメリカ。 1935
パート1
はじめに

私たちは、今年で5年を迎えた会社であり、過去の制御システムとのSAPパートナーです。 現在、大企業、不動産所有者向けに資産管理システムを導入しています。 参考までに、多くの場合、オブジェクトの数は数万(まれに数十万)であり、面積は数百万平方メートルを超えます。 そのような企業にとって、地理と信頼性とセキュリティの要件を備えたSAPは最も望ましいソリューションですが、この記事ではこれについては説明しません(興味がある場合は、個別に説明します)。
この記事では、これに焦点を当てるのではなく、ハイテクでインテリジェントな郊外の民間コテージの建設に携わる機会があったという事実に焦点を当てます...そして私たちはこのことに喜びを感じました。 そして、スマートなコテージからスマートな企業まで、今年の初めから続いてきた道の歴史を提供します。
建設およびエンジニアリングソリューションのすべての段階で停止するわけではありません。自律性とエネルギー効率の点で特徴的な特性のみに注目します。
- 壁はセラミックの石で作られ、15センチの鉱物断熱層で断熱されており、化粧レンガがこのパイを完成させています。 細かい仕上げを考慮すると、壁の厚さは約70センチメートルであり、モスクワ近辺の冬の条件で良好な保温性を確保するはずです。
- 窓。 エネルギー効率の良いガラスを備えた6チャンバーフレームを使用しました(熱損失の主な原因-IRスペクトルは98%に反映されます)。 電気ロールシャッターは、破壊行為から保護するために窓の上部に設置され、追加の空気層を作成し、夏には日当たりの良い側を覆います。
- エネルギー 最前線には、シュナイダーエレクトリック製のXantrexシステム、入力安定装置、バッテリーパック、3.6 kWソーラーパネル、自動発電機起動ユニット、およびWebベースの制御があります。
- 暖房。 多回路ボイラー、ガスボイラー、ソーラー設備、ヒートポンプ。 部屋の床下暖房とラジエーターには、電気バルブ付きの個別のラインがあります(各部屋の気候制御)。
- 換気。 復熱装置と水力発電施設を備えた強制空気および排気装置(冬は暖かく、夏は涼しい)。 各部屋/ゾーンには、個別の換気バルブがあります。 設置には差圧センサーとパフォーマンスの自動調整があります。
- 照明 主にLED。 SolarTubeを使用した2番目のライト。

自動化のためのこのようなオブジェクトを次に示します。 私たちは、家のすべてのエンジニアリングシステムを、快適で安全でエネルギー効率の高い生活を保証する単一のシンプルでわかりやすい制御システムにリンクするという課題に直面しました。 誰もがアリス( http://habrahabr.ru/post/160067/ )を覚えており、私たちは、このプロジェクトや他のプロジェクトに感銘を受けて、似たようなことを繰り返すことにしました。 また、システムが真にインテリジェントであることを望んでいました。 最小限のコントロール。
例:
- 照明は、時刻、外部照明、選択したシナリオ、部屋の人の存在に応じて自動的に点灯します(動きではなく存在を検出するためです(!!!)。特別なレビトンセンサーがあります)。
- 単一の部屋の換気レベルは、その部屋にいる人の存在と空気中のCO2の含有量によって自動的に制御されます( http://habrahabr.ru/post/187210/ )。 室内の空気を3回交換する既存の標準とは異なります。
- 部屋の温度を維持するために、ラジエーターバッテリー、床下暖房、換気システムがあります。
もちろん、すべての部屋で(Googleではなく)音声コマンドを提供したかったのです。 スクリプトの切り替え(映画、スリープ、ディスコ); マルチメディア、ロールシャッター、ソケットの管理。 アーム/アーム解除; IPカメラへの接続を含む、携帯電話/タブレットからのリモート制御が可能になります。 ある時点で、アーキテクチャの設計に取り組み、KNXですべてを実行するか、独自の何かを思いつくかの選択に直面しました。 おそらく既に推測したように、2番目のオプションを選択しました。 KNXは既製の多数のデバイス/インターフェース、美しいフレームとスイッチについて語りましたが、KNXに好意的ではなかった唯一のことは、2つの知識でした。 そこで、コントローラーの作成に取り組みました。 どうあるべきかを考えたとき、自宅でも商用プロジェクトのほとんどでも使用できるプラットフォームを作成することは素晴らしいことだと考えました。
私たちは、少しのお金でどんなアパートにもインストールできる最もシンプルでコンパクトな製品を作成するというアイデアを持っていました。 さらに、システムはモジュール式であり、さまざまなタスクに柔軟に適応する必要があります。 同時に、住宅部門(公共部門)および企業セグメントで使用できます。
まず、SMART HOUSEコントローラーが満たすべき基準を定式化しようとしました。
- コントローラは、「オープンソフトウェアとハードウェア」(オープンソースソフトウェア、オープンソースハードウェア)の原則に基づいている必要があります。 プログラミング環境はシンプルでわかりやすいものでなければなりません。 技術的な知識を持つ人なら誰でも、そのようなデバイスを独自に作成/近代化およびプログラミングできます。
- コントローラーは汎用性があり、床下暖房からマルチメディアまで「SMART HOME」の管理のすべての側面で使用する必要があります。 さまざまな種類のセンサー、アクチュエーター、換気、加熱、安全性のためのターンキーソリューションと互換性があります。
- コントローラーは、1つの部屋で使用するために自給自足で「自律」する必要がありますが、複数のコントローラーをネットワーク化する必要があります。
- コントローラーは、イーサネットまたはWi-Fi(オプション)を介したデータ転送をサポートする必要があります。
- コントローラーは、標準のソケットに収まるようにコンパクトなサイズである必要がありますが、関連するワイヤリングハーネス用に十分なスペースを残してください。
- コントローラーには、低コストで高い信頼性が必要です。
システム開発
システム全体の基礎として、私たちの選択はArduinoコントローラープラットフォームにありました
インターネットには、このプラットフォームに実装されたプロジェクトやユーザーケースに関する多くの情報がありますので、個別に説明することはせず、上記の基準を完全に満たしていることに注意してください。
プロトタイプとして、コントローラーとネットワークモジュールの最もコンパクトなバージョンを組み合わせて、多層ボードを作成することが決定されました。 コントローラボード-ATMEGA328p-MUを搭載したFemtoduino、ENC26J60に基づくネットワークモジュール、安定器、抵抗器、端子台のペア。
これをすべて小さな「マザーボード」に印刷しました。 この場合、コントローラボードはすべて標準ソケットに配置され、ネットワークケーブル用のRJ45コネクタが最大の構造要素です。

写真:WiFiカメラ、Levitonプレゼンスセンサー、220Vキャンドルライト、ソリッドステートリレー、K-30 CO2センサー、Arduino Mega2560 + Ethernet Shield、v1およびv2コントローラー、音声認識モジュール、AC-DC 5V(600ma)、femtoduino USB、DC-DCコンバーター、ENC26J60
当初、プロトタイプではLUT方式を使用して必要なプリント回路基板を作成することが計画されていましたが、コントローラーを接続するための接点間のステップが小さすぎることが判明し、ボードの品質に対する要件が増加しました。 いくつかの試みが失敗した後、LUTを拒否し、専門機関に手数料を注文しなければなりませんでした。
フェムトドゥイーノ
このコントローラーには、プログラミング用のminiUSBソケット付きとなしの2つのバージョンがあります。
コントローラーの最初のバージョンはコネクターがなく、AVRIspを使用して別のArduino互換コントローラーを介してプログラムされました。 プログラミングの便宜のために、マザーボードにはケーブル用のピンコネクタが用意されており、プログラマがボードに接続します。 ただし、このプログラミング方法は最も便利な方法とはほど遠いものです。 さらに、このプロセスでは、このタイプのいくつかのコントローラーが、ダビング中のエラーが原因で失敗することがありました。 新しいバージョンにはこの問題はありませんでした。
Femtoduino USB
コントローラーの2番目のバージョンは、プログラミング用に特別なUSBコネクターが提供されるようになったため、作業が大幅に簡素化されました。 他のArduinoボードと同様にプログラム可能です。 ただし、その動作に必要なFTDIチップにより、コントローラーと音声認識モジュールの接続に問題がありました。 Rx / Txピンは、USB以外での動作を完全に拒否しました。 問題は決して解決されませんでした(ボード開発者はFTDIが必要な結論の作業を実際に妨害することを認めました)ので、回避策-SoftwareSerialライブラリを使用しなければなりませんでした。 動作を拒否したハードウェアの代わりに、任意のピンでシリアルポートをエミュレートできます。
ENC26J60
これは非常にコンパクトなネットワークモジュールで、実際には、ほぼ同じサイズの小型ボード上のRJ45コネクタが1つだけで構成されています。 残念ながら、標準のArduin EthernetモジュールライブラリはこのENC26J60には適していないため、代わりにEtherCardライブラリが使用されました。 このライブラリは、組み込みの開発環境とはまったく異なります。組み込みの開発環境は、スケッチを開発するときにあまり便利ではありません。
したがって、必要なデバイスはすべてテストされ、マザーボード上で組み立てられました。 次のコントローラーが判明しました。
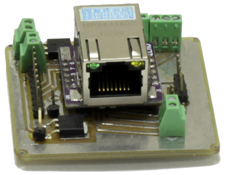
Femtoduino USBに切り替える過程で、コントローラーのサイズが縮小されました。

その結果、イーサネットケーブルを介してサーバーに接続し、ホームオートメーション(写真のオプションとして220Vで駆動)の幅広いタスクを解決できるコンパクトなコントローラーを入手しました。
TTX:
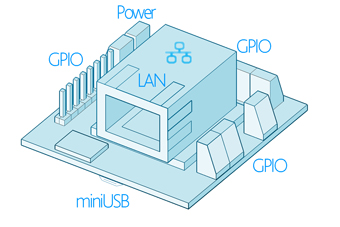
- 寸法:45x43x25 mm
- プログラミング用のMicro-B USBポート
- ネットワーク接続用のRJ45
- DC電源
- 5-10V(100-240VAC-オプション)
- マイクロコントローラー:ATMEGA328p-MU
- プログラムメモリサイズ:32 KB
- データRAMサイズ:1 KB
- 使用可能:8個のアナログポート、11個のデジタルポート
- I2C:A4(SDA)およびA5(SCL)ポート
- PWM:ポートA3、D5、D6、およびD9
スマートホームソリューションの範囲
快適さ
- 大気質管理
- 空調(換気/空調/暖房との統合)
- ローリングシャッター/ブラインド/ガレージドア制御
- 床下制御(水/電気)
- 調光(調光には追加のコンポーネントが必要です)
- 音声制御
- 自動スクリプト
- 散水管理
安全性
- オブジェクトへのアクセス制御(武装/武装解除)
- 動き/存在検出
- 火災安全
- 窓/ドアの開閉制御
- 漏水検知
- CCTVとの統合
- さまざまなSMS /メールチャネルを介した通知
有効性
計量デバイスの自動監視
- 水
- ガス
- 電気
サーバー側の開発
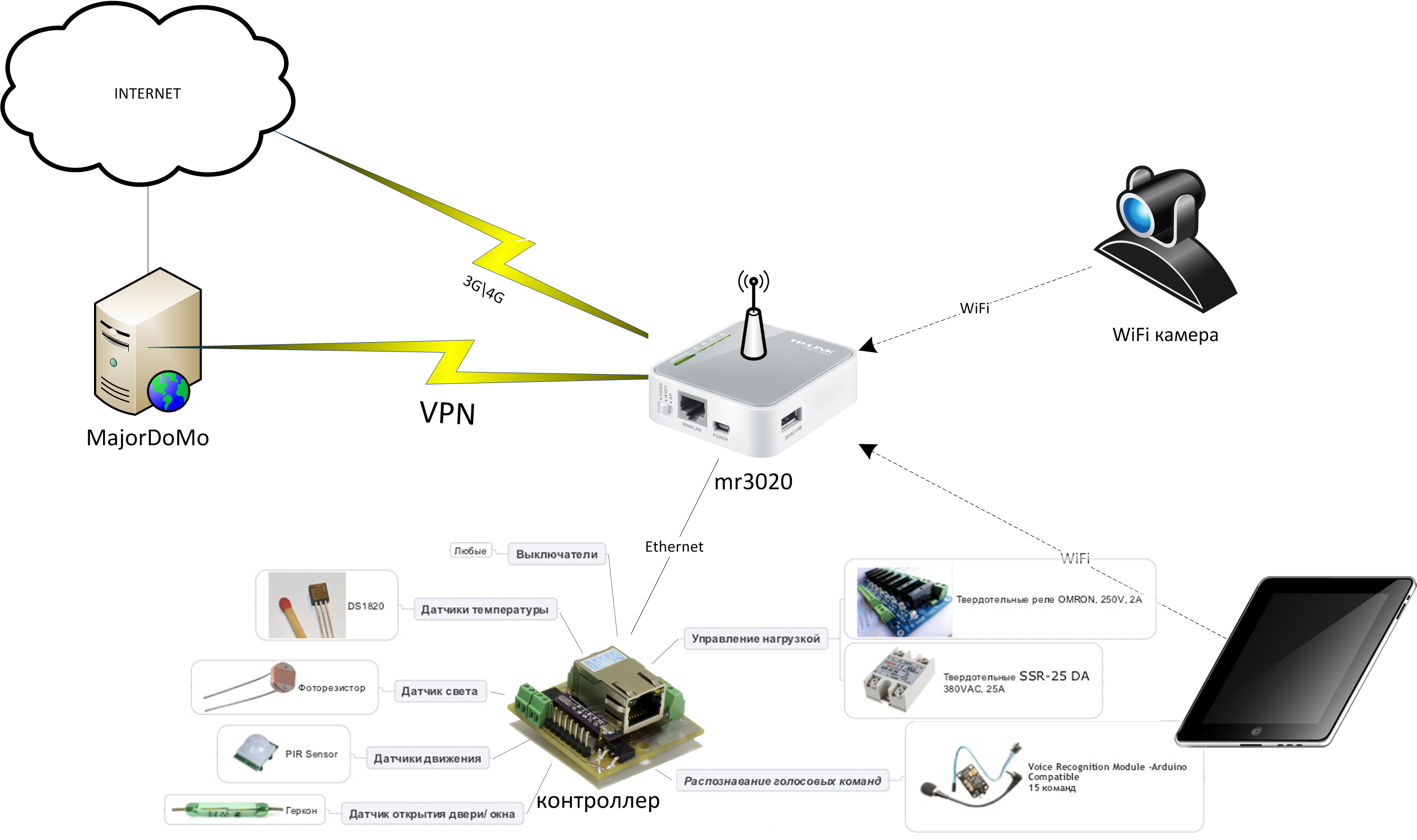
システムのサーバー側については、MajorDoMoプロジェクトが選択されました。 MajorDoMoは、スマートホームシステムを自動化および管理するためのオープンで手頃なプラットフォームです。 プロジェクトの詳細は、開発者のWebサイトsmartliving.ruで確認できます。 このソフトウェア製品は、システムの要件を完全に満たしています。 これは、さまざまな自動化タスクに適応できるオープンで構成しやすいシステムです。 同時に、システムはWebインターフェイスを介して制御されるため、どのデバイスからでも使用できます。
MajorDoMoは、システムのすべてのシナリオをプログラミングするためにPHP言語を使用しますが、プログラミングの初心者でもシステム設定を理解できる便利なグラフィカルインターフェイスを実装しています。
私たちのプロジェクトでは、Webサーバーとして使用できるRaspberry PiにインストールされたMajorDoMoパッケージを使用することを計画しました。 テスト中に、MajorDoMoはハードウェアに対する要求が高すぎることが明らかになり、そのような弱いサーバーはタスクにほとんど対処できません。 サーバー部分を最適化し、ハードウェア自体をオーバークロックしようとした後、コマンドの送信と実行の間の遅延が大きすぎたため、それを放棄することにしました。 その後、MajorDoMoのサーバーとして、専用サーバー(デジタルオーシャン)を使用し、3Gモデム経由で接続しました。 サーバーがアムステルダムにあるという事実にもかかわらず、コマンド実行に対する応答はほとんど瞬時になりました。
最後のプロトタイプに基づいて、デモンストレーションスタンドを作成することを決定しました。これにより、スマートホームシステムのコントローラーのすべての機能を視覚的に表示できます。
Raspberry Piの代わりに、専用サーバーに接続されたカスタムファームウェアを備えたTP-Link 3020が登場し、外部IPを介してシステム全体にアクセスできました。
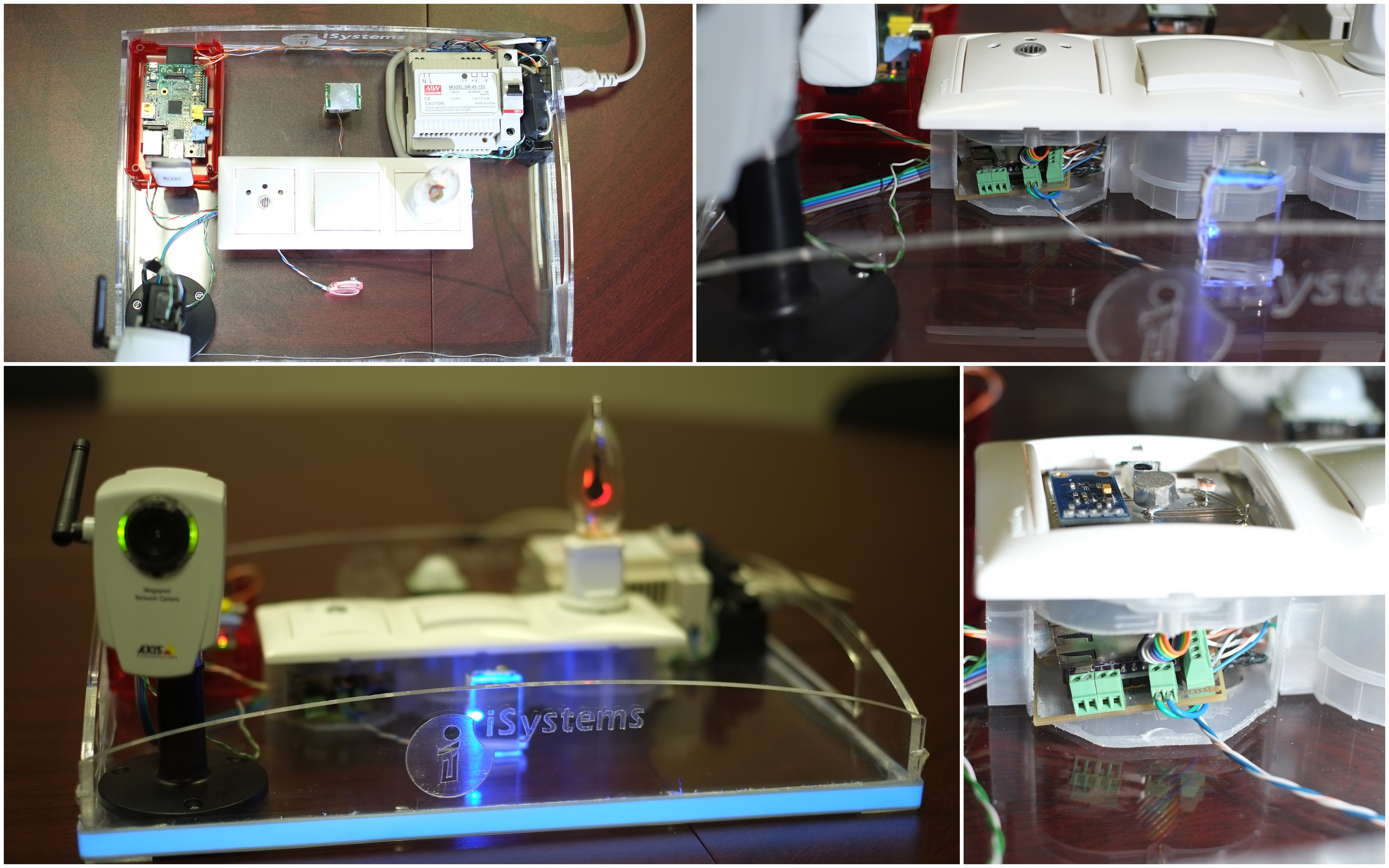
ソケットを覆うフロントフォールスパネルにセンサー付きの別のボードを配置することが決定されました。 このボードには2つの光センサーがあります:結果をスイートに変換できるデジタルセンサー、および従来のフォトレジスター、デジタル温度センサー(DS18B20、それがない場合)、音声認識モジュール用パネル、およびそのためのマイクがあります。 ボードをセンサーに接続するために、別のループが作成され、割り当てられたスロット内のコントローラーボードに直接接続されます。 センサーボードは非常にコンパクトであるため、ソケット内部のスペースを実質的に占有しません。 すべての詰め物は、ソケットのフレームと蓋の間のスペースに収まります。

最終的なレイアウトアーキテクチャ:
スタンド自体は、最終的な形では、4つのソケットボックスで構成され、互いに固定されています。 そのうちの2つは、制御されたソケット(ソケット+ソリッドステートリレー)と、コントローラーに接続された押しボタンスイッチです。 リレーを使用すると、電球などのこのコンセントに接続された負荷を制御できます。 3番目のソケットにはシステム全体の電源があり、4番目にはコントローラー自体があります。
コントローラーにセンサーが取り付けられたパネル(温度センサー、2つの光センサー、マイクを含む)に加えて、2つの追加の温度センサー(1-Wire)、リードスイッチ、モーションセンサー、LEDがコントローラーに接続されています。 レイアウトには、WiFiカメラとサーボドライブを接続するためのコネクタもあります。
ご覧のとおり、このようなミニチュアコントローラーにはかなりの量のバインディングがあります。 さらに、使用されるセンサーの多くはデジタルです。つまり、センサーを操作するにはライブラリーを使用する必要があります。 このため、レイアウトのスケッチを作成するときに問題が発生しました。 このタイプのコントローラにはメモリがあまりないため、プログラムコードのサイズに制限があります。 この問題は、大幅なコード最適化によって解決されました。
完全なコードはこちらにあります。
(詳細)
#include <EtherCard.h> #include <Servo.h> #include <OneWire.h> #include <DallasTemperature.h> #include <SoftwareSerial.h> SoftwareSerial mySerial(1, 0); //Software serial initialization #define ONE_WIRE_BUS 4 //Dallas initialisation OneWire oneWire(ONE_WIRE_BUS); DallasTemperature sensors(&oneWire); DeviceAddress Ter1; DeviceAddress Ter2; DeviceAddress Ter3; int tempC1 = 1; int tempC2 = 1; int tempC3 = 1; static byte mymac[] = { 0x74,0x69,0x69,0x2D,0x30,0x31 }; static byte myip[] = { 192,168,0,150 }; static byte gwip[] = { 192,168,0,1 }; static byte hisip[] = { 192,168,2,1 }; //char website[] PROGMEM = "192.168.2.1"; #define REQUEST_RATE 3000 Servo servo1; int xAxis = 90; int BH1750address = 0x23; byte buff[2]; int dLight = 0; #define relay1Pin 9 // //#define relay2Pin 2 // #define buttonPin 3 // int buttonState = HIGH; int lastButtonState = LOW; long lastDebounceTime = 0; long debounceDelay = 100; int lightState = 0; #define reedPin 8 int reedState = 0; #define PIRPin 7 int pirState = 0; #define photo1Pin = 2; int photo1Value = 0; int sensor = 0; // #define LED1Pin 2 #define LED2Pin 5 #define LED3Pin A0 #define LED4Pin A1 int background = 0; const char http_OK[] PROGMEM = "HTTP/1.0 200 OK\r\n" "Content-Type: text/html\r\n" "Pragma: no-cache\r\n\r\n"; const char link[] PROGMEM = "GET /objects/?object="; const char linkLight[] PROGMEM = "GET /objects/?object=lightgroup1&op=m&m=updateState&state="; const char website[] PROGMEM = " HTTP/1.1" "\r\n" "Host: 192.168.2.1" "\r\n" "\r\n"; byte Ethernet::buffer[600]; BufferFiller bfill; Stash stash; static long timer; ///////////////////////////////////////// SETUP ///////////////////////////////////////// void setup () { mySerial.begin(9600); sensors.begin(); sensors.getAddress(Ter1, 0); sensors.setResolution(Ter1, 12); sensors.getAddress(Ter2, 1); sensors.setResolution(Ter2, 12); sensors.getAddress(Ter3, 2); sensors.setResolution(Ter3, 12); ether.begin(sizeof Ethernet::buffer, mymac, 10); ether.staticSetup(myip, gwip); ether.copyIp(ether.hisip, hisip); timer = - REQUEST_RATE; // servo1.attach(6); pinMode(relay1Pin, OUTPUT); pinMode(buttonPin, INPUT); pinMode(reedPin, INPUT); pinMode(PIRPin, INPUT); pinMode(LED1Pin, OUTPUT); pinMode(LED2Pin, OUTPUT); pinMode(LED3Pin, OUTPUT); pinMode(LED4Pin, OUTPUT); delay (100); // mySerial.write(0xAA); mySerial.write(0x37); delay(100); mySerial.write(0xAA); mySerial.write(0x21); delay(100); } ///////////////////////////////////////// LOOP ///////////////////////////////////////// void loop () { word len = ether.packetReceive(); word pos = ether.packetLoop(len); netSend(); if (pos) netReply(pos); checkButton(); checkReed(); checkPIR(); checkSerial(); } //////////////////////////////////////// NETWORK //////////////////////////////////////// void netSend() { // if (millis() > timer + REQUEST_RATE) { timer = millis(); switch (sensor) { case 0: // sensor = 1; photo1Value = analogRead(2); Stash::prepare(PSTR("$Fphoto1&op=m&m=updateValue&value=$D$F"), link, photo1Value, website); ether.tcpSend(); break; case 1: // sensor = 2; //dLight = getLx(); //Stash::prepare(PSTR("$Fdlight1&op=m&m=updateValue&value=$D$F"), link, dLight, website); //ether.tcpSend(); break; case 2: // sensor = 0; sensors.requestTemperatures(); tempC1 = (int)(sensors.getTempC(Ter1)*100); tempC2 = (int)(sensors.getTempC(Ter2)*100); tempC3 = (int)(sensors.getTempC(Ter3)*100); Stash::prepare(PSTR("$Fds1&op=m&m=updateTemp&temp=$D&temp2=$D&temp3=$D$F"), link, tempC1, tempC2, tempC3, website); ether.tcpSend(); break; } } } void netReply(word pos) { // bfill = ether.tcpOffset(); char *data = (char *) Ethernet::buffer + pos; char sub[4]; char *var; var = strstr(data, "srv1="); if (var != NULL) { var += 5; for (int i=0; i<=2; i++) sub[i] = var[i]; xAxis = atoi(sub); servo1.write(xAxis); } var = strstr(data, "lgr1="); if (var != NULL) { Serial.print("Command recieved!"); digitalWrite(52, 1); } //LED Control var = strstr(data, "led1="); if (var != NULL) { var += 5; for (int i=0; i<=1; i++) sub[i] = var[i]; digitalWrite(LED1Pin, (atoi(sub))); } var = strstr(data, "led2="); if (var != NULL) { var += 5; for (int i=0; i<=1; i++) sub[i] = var[i]; digitalWrite(LED2Pin, (atoi(sub))); } var = strstr(data, "led3="); if (var != NULL) { var += 5; for (int i=0; i<=1; i++) sub[i] = var[i]; digitalWrite(LED3Pin, (atoi(sub))); } var = strstr(data, "led4="); if (var != NULL) { var += 5; for (int i=0; i<=1; i++) sub[i] = var[i]; digitalWrite(LED4Pin, (atoi(sub))); } bfill.emit_p(PSTR("$F<h1>Arduino Web Server</h1>"), http_OK); ether.httpServerReply(bfill.position()); /*bfill.emit_p(PSTR( "$F<meta http-equiv=\"refresh\" content=\"3\" >" "<h1>Arduino Web Server</h1>" "</br>ds1=$D</br>ds2=$D</br>ds3=$D</br>photo1=$D</br>dLight=$D</br>pir=$D</br>reed=$D</br>light=$D</br>srv1=$D" ), http_OK, tempC1, tempC2, tempC3, photo1Value, dLight, pirState, reedState, lightState, xAxis); ether.httpServerReply(bfill.position());*/ } /////////////////////////////////////// FUNCTIONS /////////////////////////////////////// /*unsigned short getLx() { unsigned short val = 0; BH1750_Init(BH1750address); delay(1000); if(2==BH1750_Read(BH1750address)) { val=((buff[0]<<8)|buff[1])/1.2; } return val; } int BH1750_Read(int address) {\ int i=0; Wire.beginTransmission(address); Wire.requestFrom(address, 2); while(Wire.available()) { buff[i] = Wire.read(); // receive one byte i++; } Wire.endTransmission(); return i; } void BH1750_Init(int address) { Wire.beginTransmission(address); Wire.write(0x10);//1lx reolution 120ms Wire.endTransmission(); }*/ void checkButton() { // Button int reading = digitalRead(buttonPin); if (reading != lastButtonState) { lastDebounceTime = millis(); } if ((millis() - lastDebounceTime) > debounceDelay) { if (reading != buttonState) { buttonState = reading; if (buttonState == HIGH) { switchLight(); } } } lastButtonState = reading; } void switchLight() { //if (lightState > 1) lightState = 1; lightState = !lightState; digitalWrite(relay1Pin, lightState); Stash::prepare(PSTR("$F$D$F"), linkLight, lightState, website); ether.tcpSend(); } void checkReed() { int a = digitalRead(reedPin); if (a != reedState) { reedState = a; Stash::prepare(PSTR("$Freed1&op=m&m=updateState&state=$D$F"), link, reedState, website); ether.tcpSend(); } } void checkPIR() { int a = digitalRead(PIRPin); if (a != pirState) { pirState = a; Stash::prepare(PSTR("$Fpir1&op=m&m=updateState&state=$D$F"), link, pirState, website); ether.tcpSend(); } } void checkSerial() { // VR Module if (mySerial.available()) { byte com = mySerial.read(); switch(com) { case 0x11: // 1 lightState = 1; digitalWrite(relay1Pin, lightState); Stash::prepare(PSTR("$F$D$F"), linkLight, lightState, website); ether.tcpSend(); break; case 0x12: // 1 lightState = 0; digitalWrite(relay1Pin, lightState); Stash::prepare(PSTR("$F$D$F"), linkLight, lightState, website); ether.tcpSend(); break; case 0x13: // xAxis -= 30; if (xAxis < 10) xAxis = 10; servo1.write(xAxis); break; case 0x14: // xAxis += 30; if (xAxis > 170) xAxis = 180; servo1.write(xAxis); break; case 0x15: // background = !background; digitalWrite(LED1Pin, background); digitalWrite(LED2Pin, background); digitalWrite(LED3Pin, background); digitalWrite(LED4Pin, background); break; } } }
結果は次のとおりです。

センサーの読み取り値はすべてMajorDoMoのメインページに表示され、ソケットボックスに組み込まれたLEDを制御するためのボタンは部屋モデルに作成されます。 また、ユーザーはWiFiカメラから画像を取得して回転させることができます。
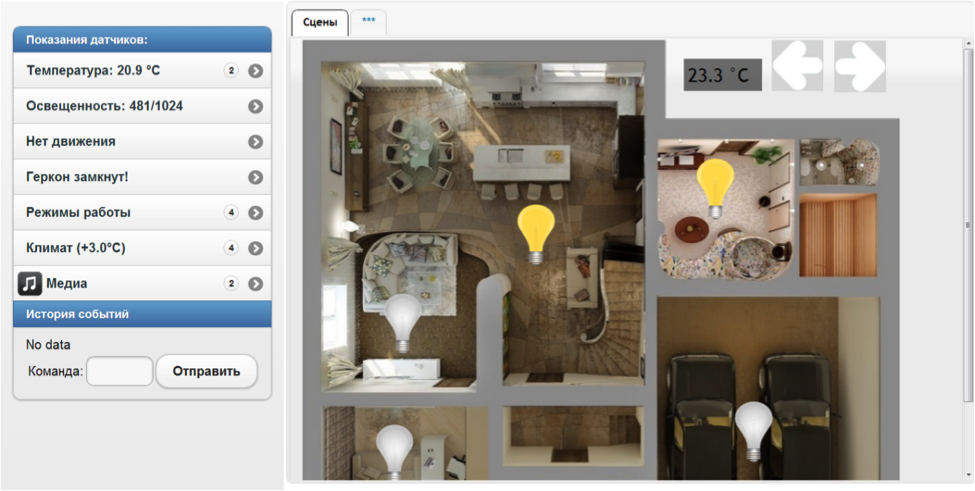
ここで動作を確認できます: http : //smarthouse.isystemsautomation.ru
いくつかの音声コマンドが音声モジュールに記録されており、たとえば、電球の点灯、ソケットの制御された負荷、カメラの左右回転などが可能です。
パート2
さらなるイベントが急速に発展しました。 レイアウトを一部の人に見せ、次に他の人に見せました...「ソーシャルエレベーター」が機能し、オープンの3週間前にスマートシティセクションのOpen Innovationsフォーラムに参加するよう招待されました。 成果を示す機会を逃すことはできませんでした。 私たちは創造を開始し、建物のモデル、噴水、都市のエンジニアリングインフラストラクチャの要素からアイデアが生まれました。 すぐに、スケッチと3Dモデルから「鉄とコンクリート」で具体化されるようになりました。
これが私たちの考えが具体化された方法です:

18個のリレーのブロックを使用して、さまざまな照明グループを制御しました。
センサーから、レイアウト上にフォトレジスターと温度センサーを引き出しました。 別の温度センサーがスタンドの下に残っているため、温度差を比較できます。
また、レイアウトには制御された噴水があります。 噴水の近くには水道メーターがあり、「象徴的に」水の流れを考慮します。 カウンターでより詳細に滞在することができます。 偶然ではなく、スマートホームシステムの最も一般的な家庭での使用を示すために選ばれました。 これは、パルス出力を備えた通常の水道メーターです。 その動作原理は非常に簡単です。10リットルごとにメーターが内部の接点を閉じると、コントローラーはこのインパルスを簡単に読み取り、保存された値に追加できます。 スピンさせるためだけに残っています。 もちろん、噴水に水を汲み上げるコンプレッサーに直接接続することもできますが、設計は複雑で信頼性が低くなります。 したがって、代替ソリューションが必要でした。 メーターを開いた後、2つの機械的に無関係な部品で構成されていることがわかりました。メーター自体は密閉されたエンクロージャーにあり、小さなインペラーはパイプに取り付けられています。 このインペラーの軸に取り付けられた磁石を使用して、カウンターを回転させました。 解決策は明らかでした。メーターの動作をシミュレートするには、水をいじる必要はありません。インペラーでパイプを取り外し、小型モーターを使用して回転磁場を作成するだけで分解できます。 このような電気モーターとして、航空機モデルの小型高速モーターが手元にありました。 子供のおもちゃからの2つのネオジム磁石がブレードで密封され、モーター自体がメーターの背面にちょうどドッキングされたプラスチックケースに取り付けられました。 その結果、コントローラーによって制御されるカウンターを取得しました(PWMを使用して速度を調整できます)。これにより、読み取り値がサーバーに送信され、サーバーに送信される方法を視覚的に表示できます。
GUI
レイアウトのフロアプランにアクセスするために、MajorDoMoが提供するWebインターフェイスに加えて、独自の開発-フロアプラン(MVPP)を視覚化するモジュールを使用し、対応するタスクで少し「完成」しました。 MVPPは元々、企業セグメント向けに開発され、自動化された不動産管理システムに含まれており、次のような幅広いタスクを対象としていたことに注意してください。
- エリア管理;
- 従業員/組織の配置の管理。
- エンジニアリングネットワークおよび機器の管理。
- フロアプランのジオメトリを表示します。
- フロアプランのジオメトリの編集。
- 職場の視覚化と編集。
- SAPモジュールに保存されている属性情報の表示(建物、床、部屋、職場、技術的な場所ごと)。
- 属性情報を編集してSAPに保存します。
- さまざまな分析レポートの作成。
ソフトウェアパッケージのアーキテクチャは次のとおりです。

MVPP WebアプリケーションはJava / JavaScriptを使用して記述され、Apache Tomcatで公開されます。モジュールのサーバー部分はESRIのArcGIS for Serverを使用し、DBMSは空間データを操作する拡張機能を備えたOracleを使用します。 MVPPとSAP間の双方向通信はWebサービスを通じて実装され、SAPのユーザー認証はSAP SSO2 Cookieを使用してエンドツーエンドです。 これがどのように見えるかです。
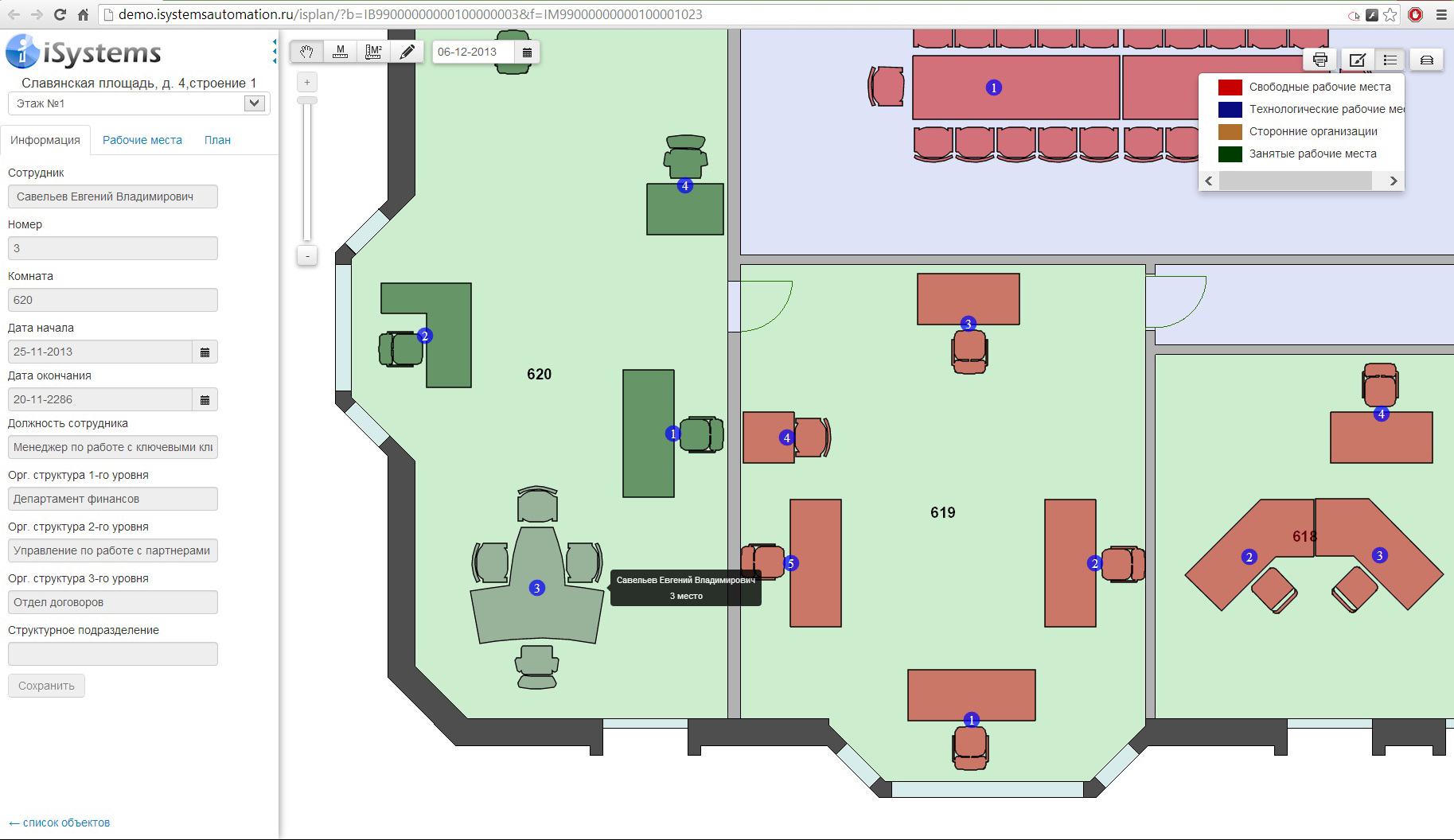
以下は、ジョブの機能配置です。 MVPPのフロアプランで行われたすべての変更(ジオメトリ、属性、ジョブなどの変更)は、SAPに転送および保存されます。

Habrasocietyにとって興味深い場合は、実装をより詳細に記述します。 それまでの間、誰でも自分でアプリケーションを試すことができます 。
それでは、レイアウトに戻りましょう。
MVPPをレイアウトと共に使用するときにMVPPから取得したい主な機能は次のとおりです。
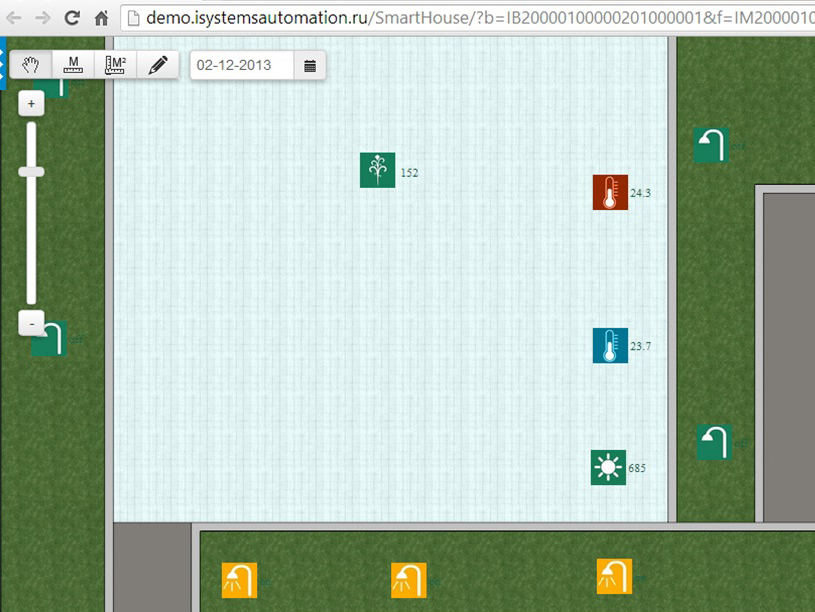
- 建物とその周辺の平面図の視覚化。
- 照明および噴水制御;
- レイアウト上にある一連のセンサーの状態の監視(グラフを作成する機能を備えた);
- レイアウトにインストールされた監視カメラからのビデオの表示(およびカメラの回転の制御);
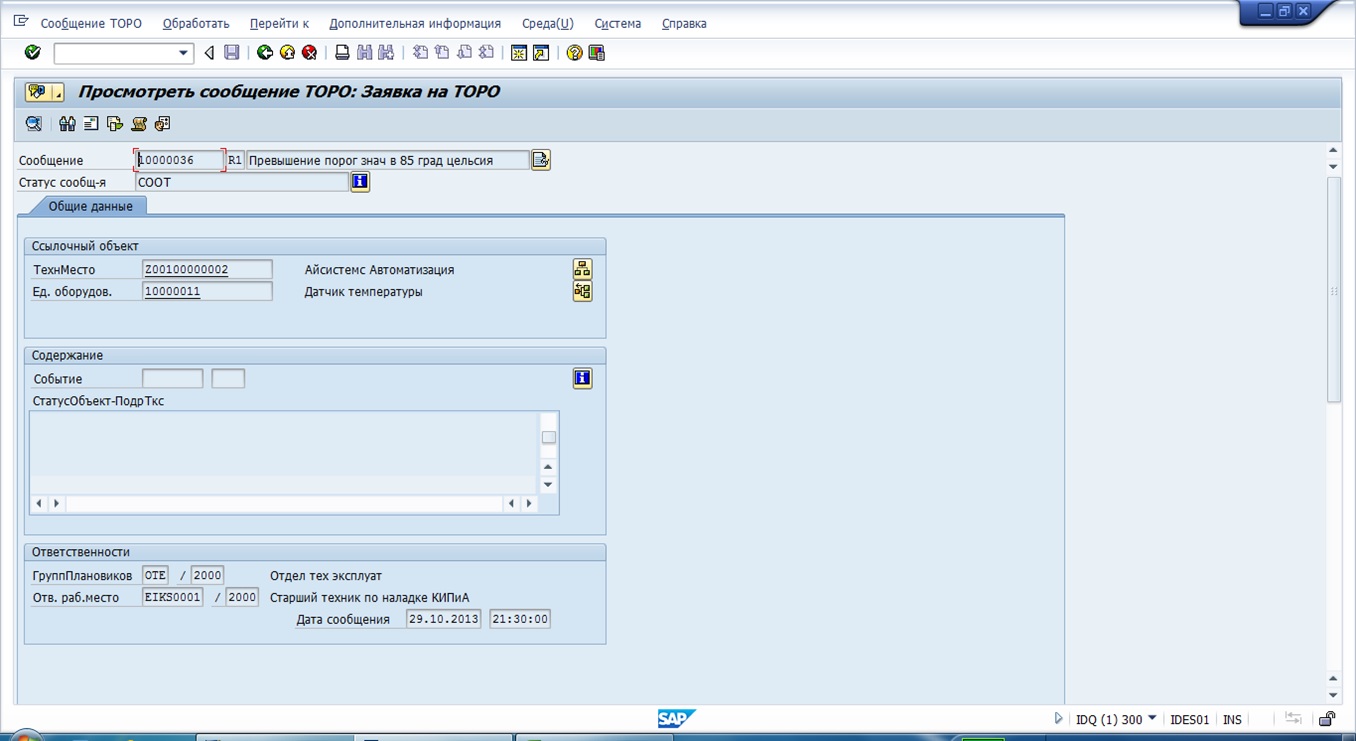
- 監視対象センサーの情報をSAP PMモジュールに転送するためのサービスの開始(インジケーターの値が最大許容値の制限を超えた場合)。
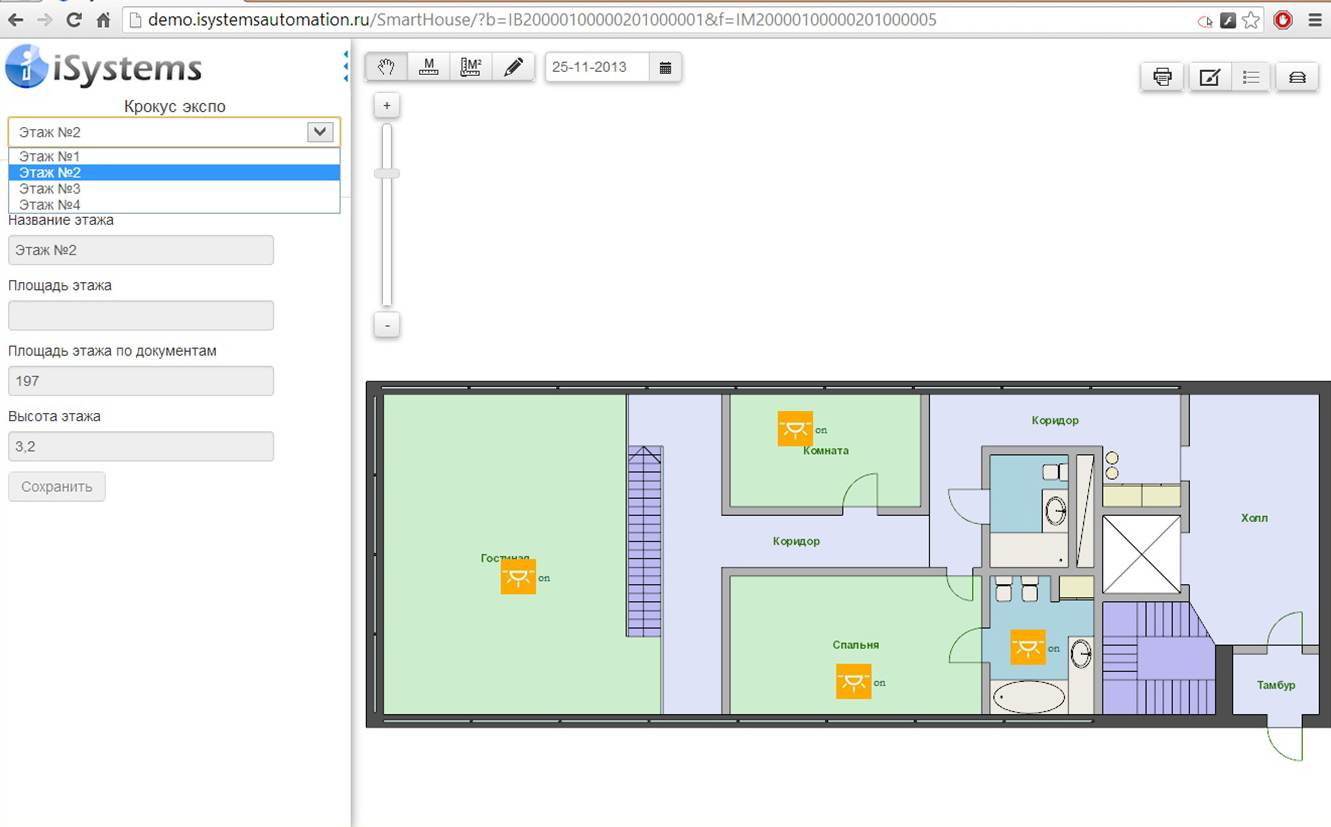
スマートホームを管理するためのインターフェイスとしてMVPPを使用するために、データベースを少し改良し、データベースの空間データモデルを拡張し(センサー、街灯、家具、周辺エリアなどのレイヤーを追加)、ArcMAPで4つのフロアを隣接する領域でプロットし、すべてのオブジェクトをリンクしましたSAPのオブジェクトを持つ識別子。 同じことがすべてのセンサーで行われました。
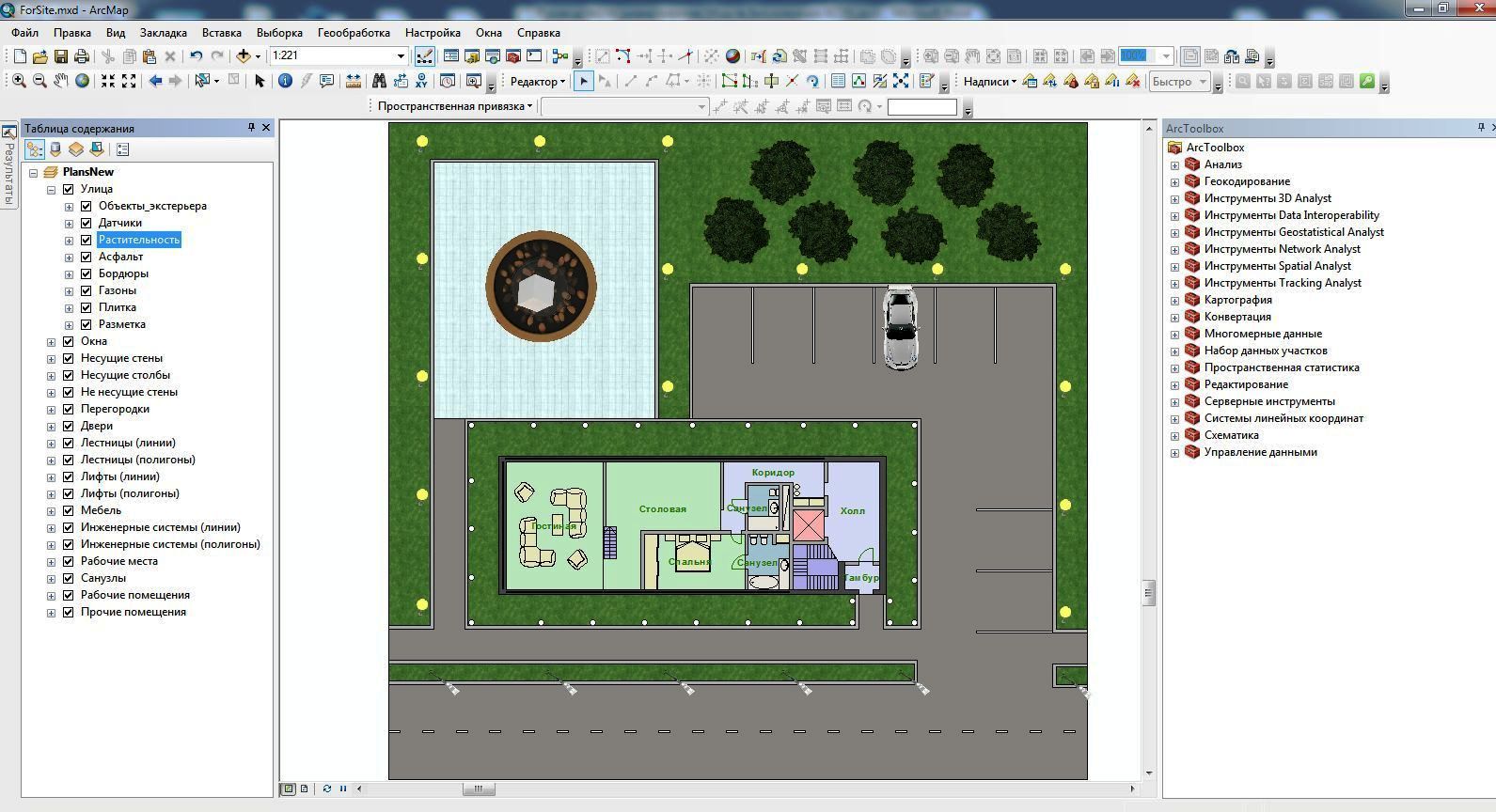
ランタンは、周囲、家の周り、道路沿いの3つのグループにまとめられました。 したがって、グループ内のランプをクリックすると、グループのすべてのランプの状態が変化します(スクリーンショットでは、「境界線に沿って」グループのライトが点灯します)。 センサーが駐車場でトリガーされると、視覚化インターフェースの対応する駐車スペースに車のシンボルが表示されると想定されました。 レイアウトの噴水をオンにすると、視覚化インターフェースのシンボルも「生き返る」はずです。
データベースに格納されたスマートホームのコントローラーから情報を取得するサービス(簡単にするために、MS SQLを使用しました)およびコントローラーに制御アクションを送信するサービス(有効/無効)を作成しました。 センサーから受信した情報の保存は、過去の期間のグラフを作成するために必要であり、これも実装されました。 温度と水の流れの制御についてさらに詳しく考えてみましょう。
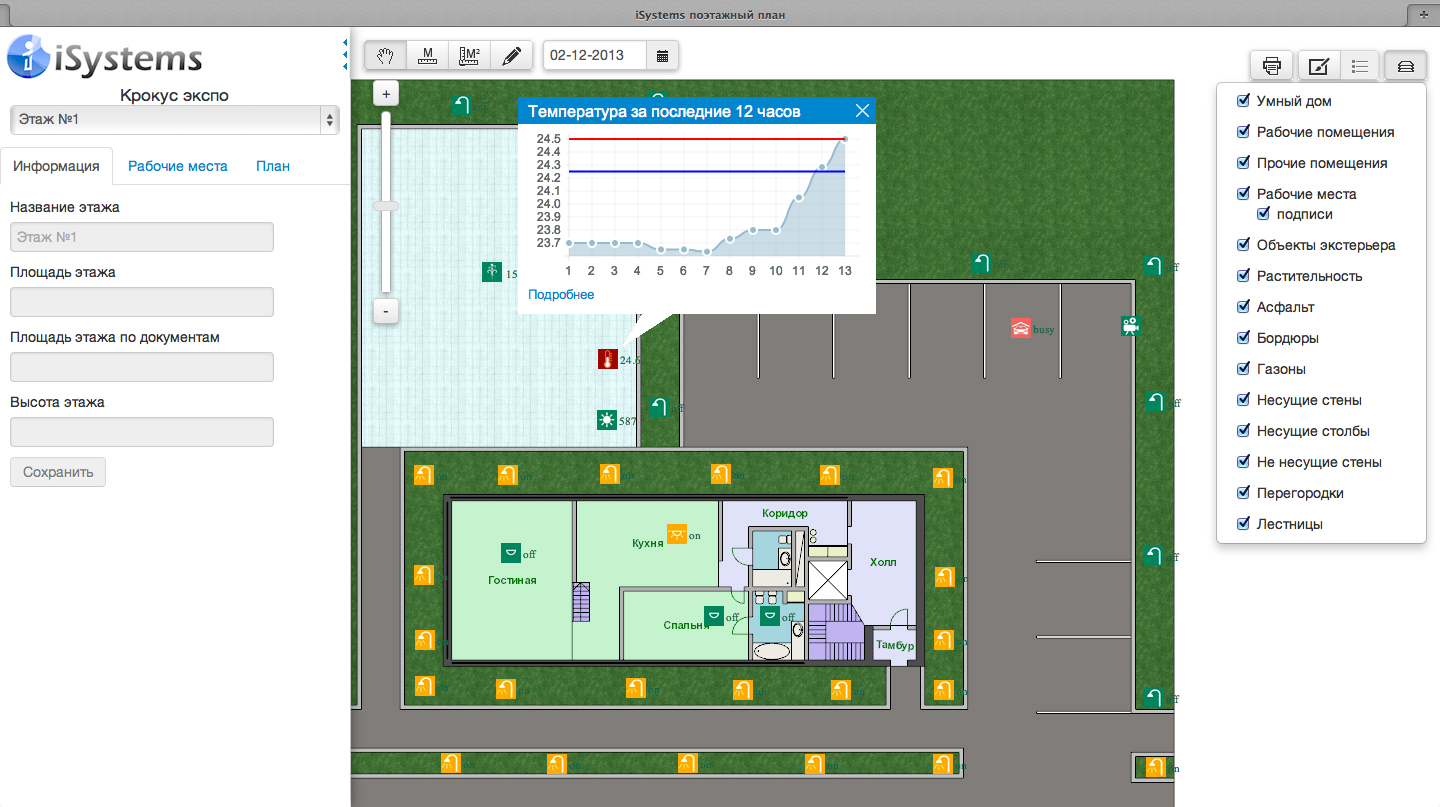
各センサーについて、境界値の個別調整が実装されました。
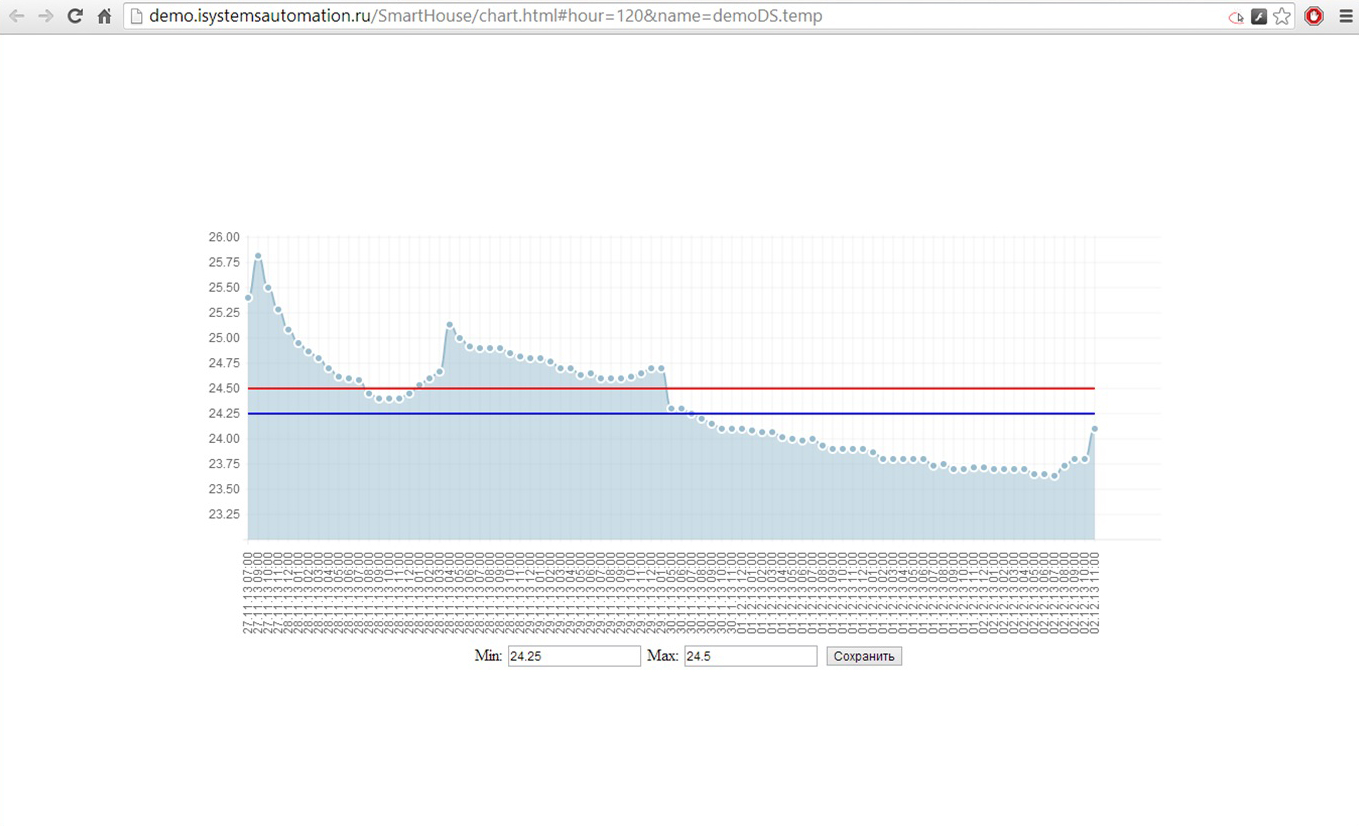
計画上のセンサー自体も、特定の廊下にある状態(正常、正常、正常以下)に応じて色で強調表示されます。
センサー値が許容値(<20および> 30℃)のコリドーを離れると、メンテナンス(SAP)で対応するインシデントを作成するサービスが開始されます。
視覚化インターフェースでは、センサーごとに境界条件を指定し、これらの条件に違反したときに発生するアクションを示すことができます。
また、説明のために、トランスミッションは、噴水に設置された水流センサーからの特定の値の間隔でPMに設定されます。

別のフロアを選択することもできます。
さらなる計画では、インターフェースで作業するために、必要な機能を自宅で(MVPPで)実装することでMajorDoMoの使用を完全に放棄することです。
その結果、コンピューターまたはモバイルデバイス(特にiPad)のブラウザーで起動できるWebアプリケーションを使用して、照明の状態、センサーからのインジケーター(水流、光、温度、駐車場)、屋外監視カメラ。 また、Webアプリケーションを使用すると、照明(建物内の屋外グループとランプの両方)、カメラの回転、噴水操作を制御できます。
私たちは3日間フォーラムに参加しましたが、この間、レイアウトは専門家とカジュアルな通行人の両方に大きな関心を呼びました。 技術的な機能に没頭している人は、制御サイクル全体(センサーからSAPまで)がバトルサーバーで機能するとは信じられませんでした。
驚くべきことに、回転する噴水のあるフレームが、フォーラムの作業に特化したテレビでのニュースリリースの大半を開始しました。 彼らは私たちについての小さな物語さえも撮影しました:
働く瞬間:

おわりに
提案された資料では、エネルギー効率が高くインテリジェントなコテージを建設するプロジェクトの結果として受け取った経験を共有しようとしました。 このプロジェクトは終わりに近づいており、仕上げと試運転が完了しています。 最後に、開発計画を共有したいと思います。
次の分野で開発が行われています。
- スマートホームのシリアルコントローラーをできる限り安くオープンにします(OpenSource Hard / OpenSource Soft)。 現在、中国のメーカーと交渉中です。いくつかのバージョンが作成されています(イーサネット/ Wifi + AC / DC)。 私たちの計画によると、最終消費者のコストは、イーサネットを使用したバージョンごとに500ルーブルを超えてはなりません。
- 私たちは、標準サイズのソケットをカバーするフロントフォールスパネルに代わるスクリーン、センサー、マイクを備えたタッチパネルを開発しています。
- このコントローラーに基づいて、特定のタスク向けの既製のソリューションを作成する予定です。 たとえば、床暖房コントローラーには、リレー、3つの温度センサー、220Vの電源、およびイーサネットモジュール(オプション)が含まれます。 消費者は、自分のタスクに対して既製のソリューションを受け取ります。 同様に、光を暗くして漏れを検出します。
- 私たちは同じ屋根の下に志を同じくする人々とパートナーを集め、安全性、効率性、使いやすさを目的とした住宅および産業インフラ管理システムの開発に関する意見交換に共同で参加することを提案します。 プロジェクトの作業タイトルはiCityです。
私たちはあらゆる分野でアイデアや提案を受け入れており、小さなチームで経験豊富な専門家も受け入れています。
需要分析については、投票フォームに投票を残してください。