
前回のアパートの改修で、生活水準の向上を考えました。 アメニティの1つは、バスルームのフードのタイマーでした。 一方では、デバイス自体がファンをオフにするため、これにより快適性が向上し、他方では、節電にプラスの効果がありました。 以下は、タイマーの説明と実装です。 最大1 kWの電力を含む電力負荷の短期的な組み込みに簡単に適応できます。
家庭用排気ファンは230ボルトの交流ネットワークから電力を供給され、15〜60 Wの出力を持つエンジンを内蔵しています。 そのため、タイマーを開発する際、BT134トライアックをスイッチング素子として使用することが決定されました。 最大4アンペアの直流に耐えることができ、そのような負荷はラジエーターなしで動作します。
制御部は安価な8ピンマイクロコントローラーで作られています。 これにより、特定のニーズに合わせてプログラムを変更できます。 たとえば、湿度センサーを追加するか、動作モードと測定時間間隔を変更します。
この実施形態では、2つの動作モードが実施される。 ボタンを押した後、タイマーはファンをオンにして1モードになり、緑色のLEDを知らせます。 設定時間(5分)が経過すると、フードがオフになります。 モード1の動作中にボタンを再度押すと、タイマーは赤色のLEDをオンにしてモード2に切り替わります。 このモードでは、ファンは次のボタンが押されるまで連続的に作動します。
回路図:
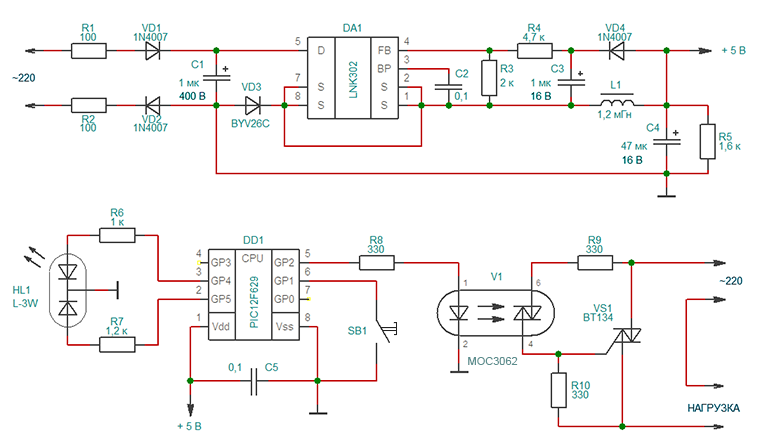
電源は、Power Integrationsによって製造されたLNK302チップで作成されます。 これにより、結果として得られるIPは小型で、効率が高く、部品点数が少なくなります。 このチップは、短絡、開回路、入力放射、および過熱に対するすべての基本的な保護を実装しています。 必要に応じてすべての必要な情報がデータシートに記載されているため、ここでは詳しく説明しません。 抵抗R4とR3は、出力電圧の安定化レベルを決定する分圧器を形成します。 抵抗R1とR2はヒューズとして使用されるため、出力MLT-0.25を使用することをお勧めします。
注意! 電源は電気的に230ボルトのネットワークに接続されているため、すべての設置および試運転作業は、デバイスの電源をオフにして安全上の注意事項に従って実行する必要があります!
タイマーと制御部は、PIC12F629マイクロコントローラーで作成されています。 2色のLED、ボタン、およびVS1キーを制御するオプトシミュレータが接続されています。 ヒューズは負荷回路に取り付けられていますが、図には示されていません。 その値は、ファンのパラメーターに基づいて選択されます。

設計の実装は、特定の条件に依存します。 たとえば、スイッチから空いているボックスがあったので、そこにタイマーを取り付けることにしました。 電気用品店で購入したテレビ用のコンセントは、屋外の装飾に適していました。 アンテナコネクタがそこから投げ出され、2色のLEDを取り付けるためにハウジングが開けられ、ボタンが選択されました。 その後、プリント回路基板は離婚して作られます。 したがって、ケースに合わせて付属の回路基板を調整する必要がある場合があることに注意してください。
プリント回路基板は、サイズが45 x 45 mmの片面ファイバーグラスでできています。 いくつかの要素はSMDケースによって複製されるため、利用可能なものをインストールできます。 SMDスロットルを設定しましたが、出力スロットルしかない場合は、パッドの下にドリルで穴を開けることができます。
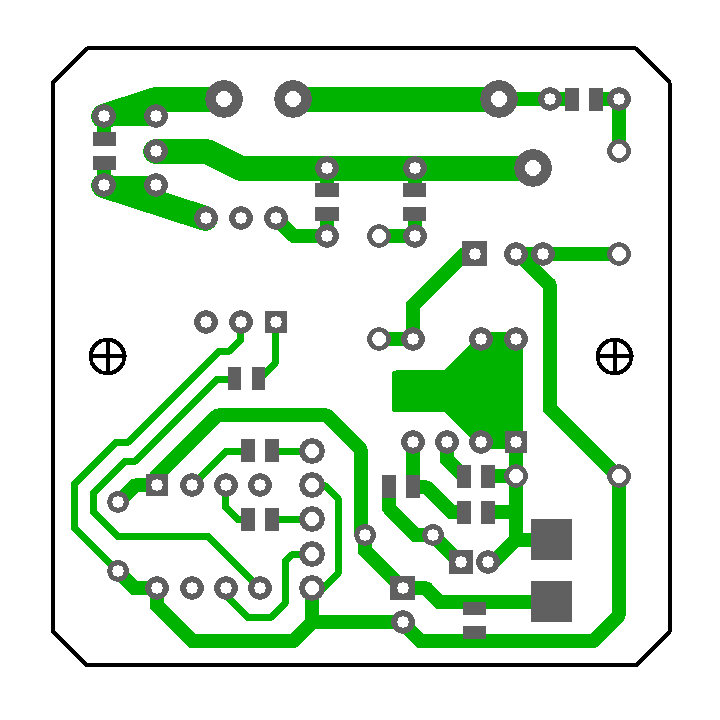
PCB図面(はんだ側面図):
出力要素のインストール:
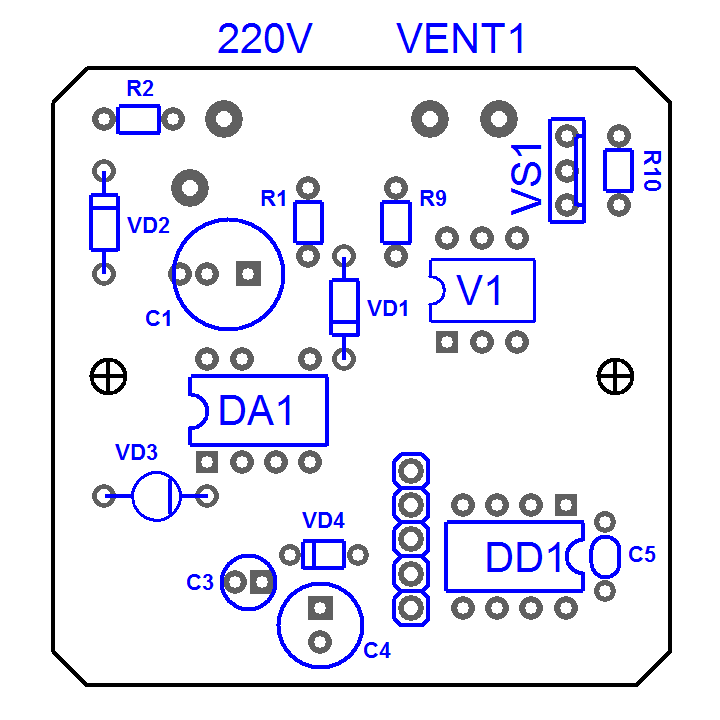
SMD要素のインストール:

プログラムのソースコード:
title "TimerVent" ; errorlevel 0, -207, -302 #include <P12F629.inc> CBLOCK 0x020 ; tmp ; del, del_m ; cfg ; time_h, time_l ; ENDC __CONFIG _CPD_OFF & _CP_OFF & _BODEN_ON & _MCLRE_OFF & _PWRTE_ON & _WDT_OFF & _INTRC_OSC_NOCLKOUT #define SET_LED_K bsf GPIO, 5 ; #define SET_LED_Z bsf GPIO, 4 ; #define ZERO_LED_K bcf GPIO, 5 ; #define ZERO_LED_Z bcf GPIO, 4 ; #define SET_MOTOR bsf GPIO, 2 ; () KNOPKA equ 1 ; 1 org 0 goto INIT ; DEL_MK movwf del ; ( , 770 max) M1 decfsz del, F ;( W) goto M1 return DEL_M movwf del_m ; ( , 256 max) movlw 0xa5 ;( W) M2 call DEL_MK call DEL_MK decfsz del_m, F goto M2 return INIT bcf STATUS, RP0 ; 0 movlw B'00000111' movwf CMCON ; clrf GPIO bsf STATUS, RP0 ; 1 movlw B'00000010' movwf WPU movlw B'00000000' movwf OPTION_REG call 3FFh ; movwf OSCCAL movlw B'00000010' movwf TRISIO ; movlw B'00000010' ; movwf IOCB bcf STATUS, RP0 ; 0 clrf cfg ;----------------------[ ]-------------------------- SM btfsc GPIO, KNOPKA goto SM bcf T1CON, TMR1ON ; 1 movf cfg, F btfsc STATUS, Z goto MOD1 btfsc cfg, 0 goto MOD2 OUTP clrf GPIO ; "" clrf cfg movlw 0xfa ; 0,5 call DEL_M movlw 0xfa call DEL_M goto SM ;----------------------[ ]------------------------- MOD1 clrf cfg bsf cfg, 0 ZERO_LED_K SET_LED_Z SET_MOTOR movlw 0xfa ; 0,5 call DEL_M movlw 0xfa call DEL_M movlw b'00110100' ; 1 movwf T1CON clrf TMR1H clrf TMR1L clrf time_l clrf time_h bsf T1CON, TMR1ON ; 1 M3 btfss GPIO, KNOPKA goto SM btfss PIR1, TMR1IF ; goto M3 bcf PIR1, TMR1IF ; , incf time_l, F btfsc STATUS, Z incf time_h, F movlw 0x58 ; xorwf time_l, W btfss STATUS, Z goto M3 movlw 0x01 ; xorwf time_h, W btfss STATUS, Z goto M3 goto OUTP ;----------------------[ ]-------------------------- MOD2 clrf cfg bsf cfg, 1 SET_LED_K ZERO_LED_Z SET_MOTOR movlw 0xfa ; 0,5 call DEL_M movlw 0xfa call DEL_M M4 btfsc GPIO, KNOPKA goto M4 goto OUTP END ;--------------------------------------------------------------------------- ; DEL_MK: ; 0x20 - 100 ; 0xa5 - 500 ;--------------------------------------------------------------------------- ; cfg: ; "0" - , " " () ; "1" - , " " () ; "2" - ; "3" - ; "4" - ; "5" - ; "6" - ;---------------------------------------------------------------------------