
こんにちは、Habr。 私たちのチームは、Todサービスロボットを開発しています。 私たちは、多機能ロボットの作成に取り組んでおり、その機能は、PR2 Willow Garageなどのモバイルロボットのフラッグシップと競合できるようになります。 私たちは小さなものから始めますが、ロボットは毎日新しいスキルを身に付け、新しいセンサーを装備しています。 前回の記事で 、一般的なサービスロボットについて知ることができます。今日は、Todナビゲーションシステムの実装に焦点を当てます。 今日は、車輪の走行距離測定に基づいて自身の位置を決定するナビゲーションタスクを実行し、超音波ソナーから感覚データを受信するようにロボットに教える方法を説明します。 このすべてのビジネスは、さまざまなロボットプロジェクトで実証されているロボットROS(Robot Operating System)のオペレーティングシステムで管理されます。 猫へようこそ。
素人にとっては、「ロボット」という言葉は、ターミネーターの精神に基づいたSF映画のスマートなヒューマノイドロボットに関連している可能性が高いです。 実際のロボットと従来の機械の違いは何ですか? まず、ロボットには自律性があります。これは、人間の介入なしに独立して意思決定を行う能力で表されます。
自律ロボットは、目標を達成するためにナビゲーションの問題を解決できなければなりません。 基本的なナビゲーションタスクには、さまざまな種類のセンサー(距離計、カメラ、GPSナビゲーター、特殊ビーコンなど)からのデータの解釈に基づく環境認識、ルート計画、および執行機関を使用した環境との対話型対話が含まれます。 、ホイールおよびマニピュレーター。
高品質のナビゲーションアルゴリズムは複雑な数学に基づいているため、多くの初心者のロボット工学は、ヤコビアンと四元数の計算と衝突し、運動学モデルを構築し、確率的アルゴリズムを適用した後、熱意を失います。 幸いなことに、今日、ROS、Player、Microsoft Robotics Studioなどの多くのロボットフレームワークがあり、必要な永続性を持つ初心者でも、プロジェクトで複雑なナビゲーションとAIアルゴリズムを使用できます。
ROSとナビゲーションスタック
私たちのチームは、Todロボットにオープンソースのロボットオペレーティングシステムフレームワークを使用することにしました。 ROSは今日、多くの研究グループや企業のロボットプロジェクトで使用されています。 このフレームワークは、ハードウェアの抽象化、低レベルのデバイス管理、基本的な機能とアルゴリズムの実装、プロセスとパッケージマネージャー間のメッセージの受け渡しなど、OS全体の機能に匹敵する機能を提供します。 ROSの実行可能プログラムは、共通のトピックにサブスクライブすることにより、相互にメッセージを交換できるノードのセットです。 このようなノードは、C ++およびPythonで個別に実装できます。 ROSはUbuntuの制御下で完全に動作します。特に、Tod Ubuntu 12.40およびROS Groovyに使用します。 ROS、ドキュメント、および適切なウォークスルーの詳細については、ros.orgをご覧ください。
ナビゲーションの問題を解決するために、ROSはナビゲーションスタックを提供します。 スタックは、入力データとして走行距離計データ(ロボットの車輪が移動する経路)とセンサーを使用し、出力で移動速度制御コマンドをロボットに送信します。 特定の条件が満たされると、ロボットでナビゲーションスタックを「そのまま」使用できるようになります。
-ロボットの形状は円形または長方形でなければならず、その車輪は非ホロノミックでなければなりません。 ロボットの移動は、車輪の回転方向に沿ってのみ実行する必要があります。 たとえば、車や自転車の車輪は非ホロノミックです。
-ロボットは、キネマティックノードとロボットのセンサー間のすべての幾何学的関係に関する情報を提供する必要があります。 この情報はURDFモデルで指定され、ノードtfは、回転行列、オイラー角、および四元数を使用して、ある座標系から別の座標系への複雑な幾何学的変換を実行できます。
-ロボットは、線形および角速度の形式で動きを制御するためのメッセージを送信する必要があります。
-場所を特定して地図を作成するタスクを解決するには、レーザー距離計または3Dスキャナーを使用する必要があります。 ただし、少しだまされている場合は、高価なセンサーの代わりに他の安価なアナログを使用できます:ソナーまたは赤外線距離計。 この場合、主なことは、実行可能ノードに送信されるメッセージの正しい形式を観察することです。
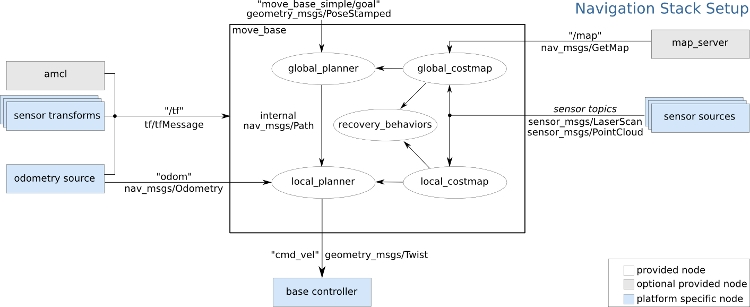
この図は、ナビゲーションスタックの一般的なレイアウトを示しています。 矢印の間のテキストは、ノード間で交換されるメッセージのタイプを示します。 このスタックには3つのタイプのノードがあります。
-白い長方形に配置されたノードはROSによって提供されます
-灰色の長方形に配置されたノードもROSによって提供されますが、スタックでのノードの使用はオプションです
-青緑色の長方形に配置されたノードはハードウェアに依存し、それらの実装は通常開発者の肩にあります。
ROSナビゲーションスタックを使用するための要件がわかったので、それをTodロボットに適合させることができます。
ベースコントローラーとモーションコントロール
ベースコントローラーはナビゲーションスタックのノードであり、ロボットの動きを制御する役割を果たします。 ROSは標準のベースコントローラーを提供しません。そのため、ロボットには独自のノードを作成するか、サードパーティのオープンソースソリューションを基盤として使用する必要があります。 ロボットの動作制御コマンドは、geometry_msgs / Twistタイプのメッセージのcmd_velトピックでベースコントローラーに送信されます。
geometry_msgs/Vector3 linear float64 x float64 y float64 z geometry_msgs/Vector3 angular float64 x float64 y float64 z
線形ベクトルは、x、y、z軸に沿ったロボットの線形速度を定義し、角度ベクトルは、x、y、z軸の角速度を定義します。 さらに、これらのコマンドはエンジンの回転を制御するコマンドに変換され、ロボットは指定された方向に移動します。
速度ベクトルを設定する順序は、ロボットの運動学に依存します。 Todロボットには、DCモーターをベースにした2輪ディファレンシャルドライブが装備されています。 つまり、geometry_msgs / Twistメッセージでは、x軸に沿った線形速度(前後運動に対応)と角速度z(非ゼロの線形速度を指定する場合のインプレース回転または円弧に沿った運動に対応)のみが指定されます。
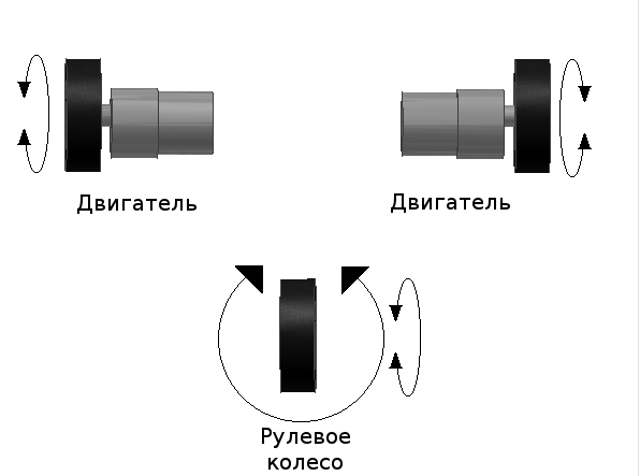
差動駆動の3輪ロボット。 ステアリングホイールまたはボールジョイントは、ロボットの安定性を提供します。
これらのロボット速度を対応するエンジン速度に変換することは、幾何学的計算を必要とする些細な運動学の問題です。
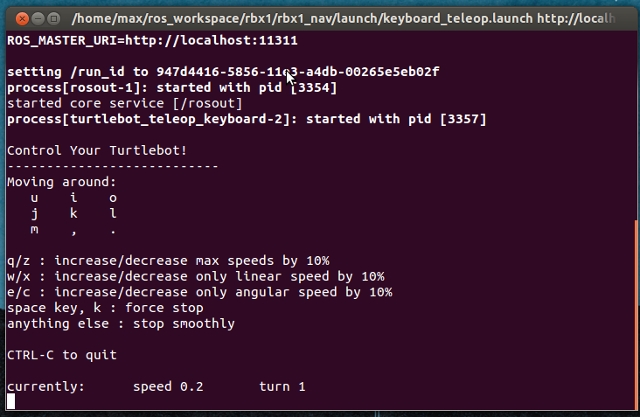
12ボルトエンジンに必要な電力を提供するPololu Dual MC33926モータードライバーシールドと組み合わせて、エンジンの回転を制御する低レベルのタスクをArduino Unoに任せました。 ベースコントローラーを実装したら、キーボードとROSノードturtlebot_teleopを使用してロボットに乗ることができます。このノードは、geometry_msgs / Twistベースコントローラーメッセージを送信します。
オドメトリー
オドメトリーは、最も一般的な推測航法です。 この方法の本質は、地図上の任意の固定点に対する増分ホイール速度の計算に基づいてロボットの位置を決定することです。 通常、走行距離測定は、車輪に取り付けられた、またはロボットモーターに直接取り付けられた光学式デジタルエンコーダーによって行われます。 Todには、モーターシャフトの1回転あたり64パルスの分解能を持つデジタルエンコーダーが装備されています。これは、ホイールの1回転あたり8384パルスに相当します。
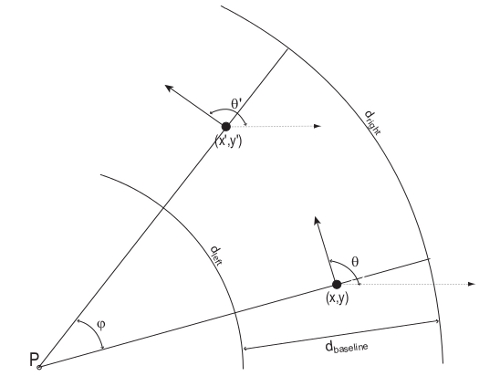
走行距離測定ジオメトリ。 ロボットの位置(x、y、シータ)とdbaselineのホイールベース幅が与えられた場合、新しい位置(x '、y'、シータ ')を計算する必要があります。
ナビゲーションスタックは、nav_msgs / Odometryなどのメッセージを使用して走行距離データを取得します。
std_msgs/Header header uint32 seq time stamp string frame_id string child_frame_id geometry_msgs/PoseWithCovariance pose geometry_msgs/Pose pose geometry_msgs/Point position float64 x float64 y float64 z geometry_msgs/Quaternion orientation float64 x float64 y float64 z float64 w float64[36] covariance geometry_msgs/TwistWithCovariance twist geometry_msgs/Twist twist geometry_msgs/Vector3 linear float64 x float64 y float64 z geometry_msgs/Vector3 angular float64 x float64 y float64 z float64[36] covariance
geometry_msgs / Poseメッセージは、3次元空間でのロボットの現在位置と方向を決定します。オブジェクトが3次元空間で回転する場合、四元数によって便利に計算されます。 既知のgeometry_msgs / Twistメッセージは、線速度xと角速度zを定義します。
計算を実行するとき、いくつかの座標系を扱っているため、ノードtfが必要です。 tfノードは、ロボットのURDFモデルと連携して、ロボットのローカル座標系からマップのグローバル座標系に位置を変換する面倒な計算を実行します。
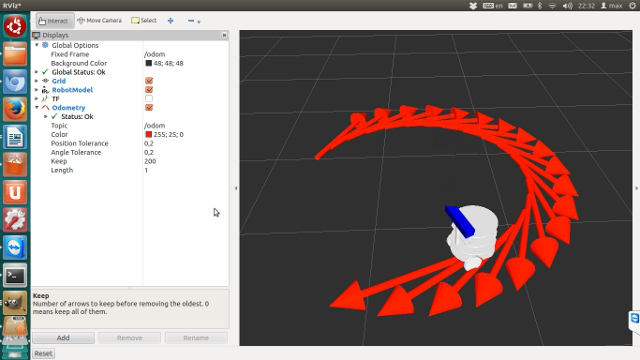
Rvizシミュレーターでの走行距離データを使用したTod URDFモデルの視覚化。
ソナー
ロボットはさまざまな種類のセンサーを使用して、周囲の世界に関する情報を取得できます。 センサーの特性は大きく異なり、制限、弱点、および強度があるため、いくつかのタイプの共同使用が最も有益であると考えられています。
超音波ソナーを使用して、物体からロボットまでの距離を測定できます。 ソナーは、TOF(飛行時間)テクノロジーで動作します。 それらは、経路内の最も近いオブジェクトから反射され、エコーの形で戻る音信号を発します。 信号の「飛行」時間は固定され、それに基づいてオブジェクトまでの距離が計算されます。
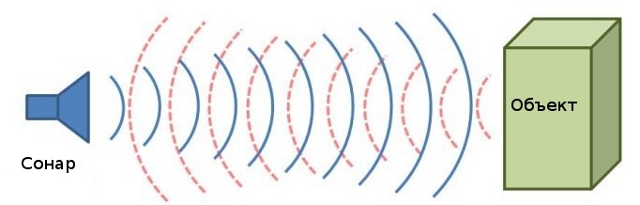
ソナーはビープ音を発し、エコーを「聞き取り」ます。
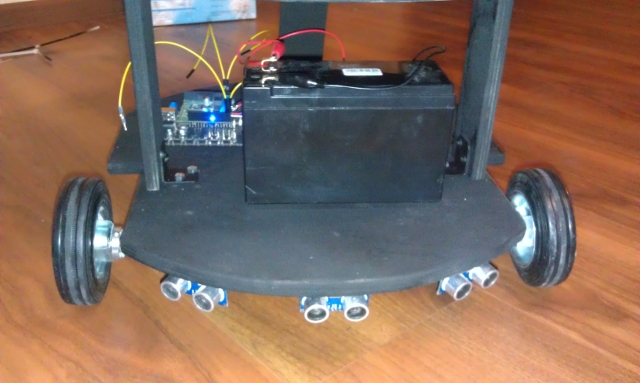
TodはHC-SR04ソナーを使用しており、0.2〜5 mの測定範囲を0.03 mの精度でサポートしています。1つのHC-SR04の視野角は30度です。複数のソナーを並べて配置すると、より大きな視野角を得ることができます。 トッドの前面にある3つのソナーは、90度の視野角を提供します。
ROSナビゲーションスタックは、さまざまな種類のセンサーからのデータを使用して、走行距離を取得したり、部屋の地図を作成したり、障害物を回避したりできます。 理論的には、12個以上のソナーは360度の視野角を与え、高価なレーザー距離計の安価な代替品であるため、ソナーを使用して部屋の地図を作成することができます。 TodはKinectを使用してマップを作成します。これは、多くの感覚特性でソナーを上回ります。 ただし、これはソナーを廃棄する理由ではありません。 Kinectはロボットの十分高い位置に取り付けられているため、車輪の真下で何が起こっているかを見ることができません。 ソナーはこの死角を捉え、それによって経路の計画と障害物の回避の問題を解決するのに役立つように見えます。
前述のように、ナビゲーションスタックはレーザーセンサーと3Dスキャナーのみをサポートします。 この制限は、ソナーシステムを偽の3Dスキャナーとして提示することで回避できます。 3-Dスキャナーは、3次元空間の点群を記述するsensor_msgs / PointCloudメッセージを使用します。
std_msgs/Header header uint32 seq time stamp string frame_id geometry_msgs/Point32[] points float32 x float32 y float32 z sensor_msgs/ChannelFloat32[] channels string name float32[] values
ソナーの感覚データは、x、y座標、z座標の形式で各クラウドポイントを0に設定することで、この形式で表すことができます。同時に、各ソナーに対してこのようなポイントをいくつか設定でき、クラウドの密度を上げることができます。 これは、トッドソナーからの感覚データの視覚化のようです。
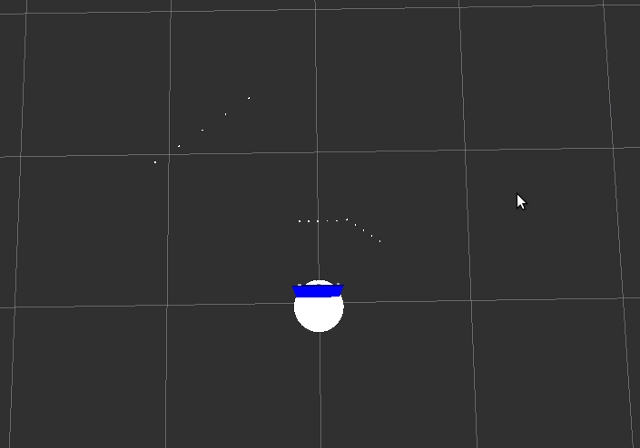
Rvizでのソナー感覚データの視覚化。
ご清聴ありがとうございました。今日は以上です。 次の記事では、実験テーマの例を使用して、ROSナビゲーションスタックの機能について引き続き説明します。TodKinectに接続し、それを使用してアパートメントマップを構築し、ルートを計画し、障害を回避する方法を教えます。