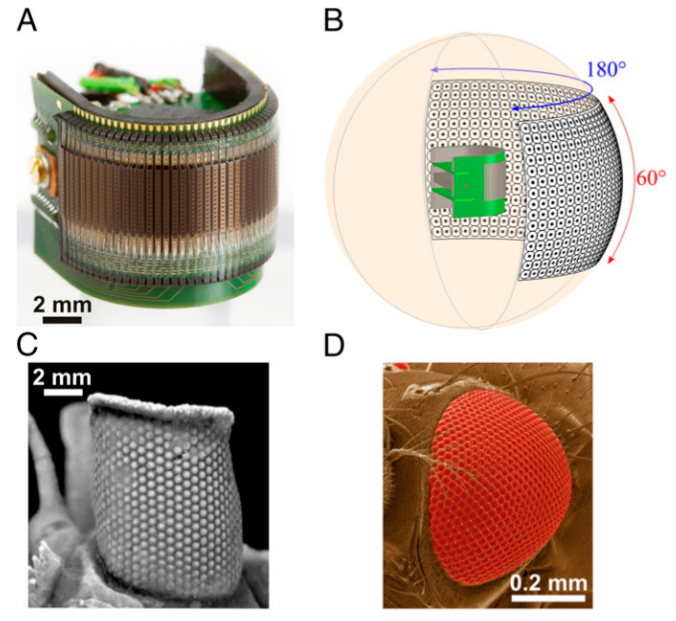
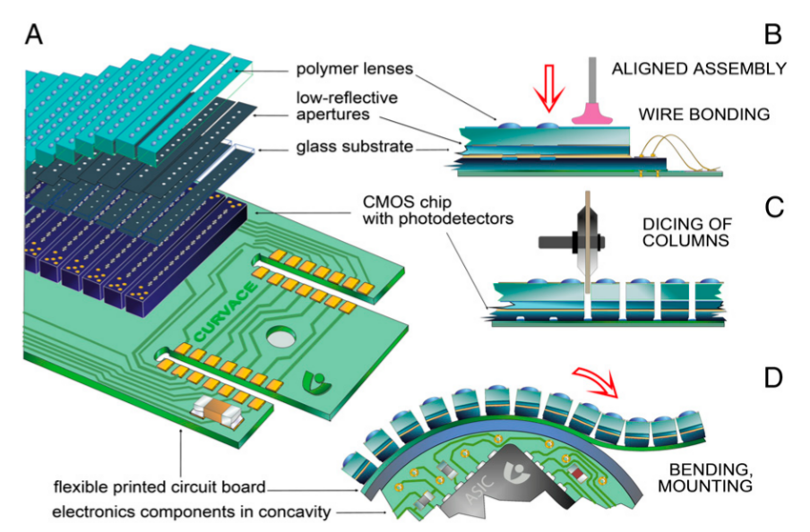
科学者がCurvACE (CURVed Artificial Compound Eyes)と呼ぶ人工眼は、630個の「個眼」で構成されています。各個は、感光性エレメントと、それに狭い光線を集束させるマイクロレンズです。 眼の視野角は、垂直面で60度、水平面で180度です。 異なる個眼の垂直画角は、マイクロレンズの形状によって、水平方向は眼が位置する基質の曲線によって与えられます。 この形状は製造技術によって決定されます-感光性エレメントは固体結晶上に形成され、その後、細いストリップに切断されます。
目の体積はわずか2.2立方センチメートルで、重さは1.75グラムです。 工業生産では、現在のレベルの技術により、そのサイズが少なくとも半分に縮小されます。 目の主な目的は、ロボット用の視覚的ナビゲーションシステムです。 眼は高い感度とダイナミックレンジを備えています-各個眼は照明のレベルに個別に適応できます。 そのような目は太陽フレアによって盲目にすることはできません。 高速(プロトタイプは毎秒1500フレームまで生成可能)、小型、視野の縁に沿った歪みなし、円形または球形のビューを比較的簡単に実現する能力と組み合わせて、これは宇宙空間でのロボットの位置を決定し、障害物を検出し、衝突回避。
その特性によれば、CurvACEはショウジョウバエのショウジョウバエの目にほぼ対応しています。 これは人工のファセットアイを作成する最初の試みではありませんが、スイスの科学者の開発は完全に異なります-彼らの目標は、単なる光学センサーではなく、ナビゲーションのための包括的なソリューションを作成することです。 画像の主な処理のために内部に神経節を含む昆虫の目だけでなく、urvACEには、 オプティカルフローアルゴリズムと加速度計およびジャイロスコープを使用してセンサーからの信号を処理するマイクロコントローラーが含まれています。 プロジェクトのWebサイトで、目で作業するためのライブラリをダウンロードできます。
実際には、電子充填は目の質量と体積の大部分を占めています。マイクロレンズを備えたCMOSセンサーのアレイは厚さ1 mm、重さ0.36グラムです。 ファセットカメラに任意の形状を与え、大きなレンズがないことにより、多くの可能性が広がります。そのような「目」は、部屋の壁、スマートホームまたはビデオ監視システムで使用する衣服または家具に組み込むことができます。 1つのセンサーに異なる種類の個眼を組み合わせることで、異なる範囲で同時に見えるカメラを作成できます。
CurvACE開発は2009年から進行中です。 プロジェクトの総予算は273万ユーロです。 プロジェクトの詳細な説明を含む記事は、 このリンクから入手できます。