このトピックでは、歴史的な正義を取り戻し、ソビエトのエンジニアが、470°Cを超える温度と93気圧の圧力で非常に過酷な環境でパノラマ撮影を正常に実行できるデバイスを作成した方法について説明します。

金星の研究におけるソビエトの成功の歴史はかなりよく説明されているので(少なくともWikipediaでは)、主なマイルストーンの概要のみを説明します。
- 1961年に、人類史上最初の装置が送られました。これは、他の惑星「金星1」の研究を目的としています。
- 1967-「Venus-4」は、惑星の大気に侵入し、そこから科学データを送信する最初のデバイスになりました。
- 1970-金星7着陸機が金星の表面にソフトランディングを行い、情報は表面から20分を含む53分間送信されました(これは別の惑星の表面からの無線通信の最初のケースです)。
- 1975-別の惑星の表面からの最初の白黒パノラマ画像( "Venus-9、10")。
- 1982-初めて表面のカラー画像が取得され、惑星の土壌の直接分析が行われました(「Venus-13、14」)。
したがって、金星-9が打ち上げられるまでに、ソビエトの科学者は写真撮影が行われる条件について十分な情報を持っていました:まず第一に、これらは工学構造の正確な計算に必要な温度と圧力のパラメータでした(金星-4まで)大気が10気圧に等しいと見なされたため、この降下ビークルが惑星の表面に到達する前に破壊された)、カメラの正しいセットアップの照明パラメーター(たとえば、不適切なシャッタースピードのために火星2と火星3からの写真n 実用的な)科学的価値を表すものではありませ。
Venera-9降下ビークルの科学機器には、温度および圧力測定システム、大気の化学組成を決定するための質量分析計、加速度計、比濁計(2)、光の状態を研究するための光度計(可視領域の3バンド+ 2 IR 3つの立体角)、CO 2およびH 2 Oの吸収帯用の光度計、風速計、金星の岩石に含まれる天然の放射性元素の含有量を測定するガンマ分光計、表層の土壌の密度を測定する放射線密度計 惑星、パノラマ望遠計(2)。
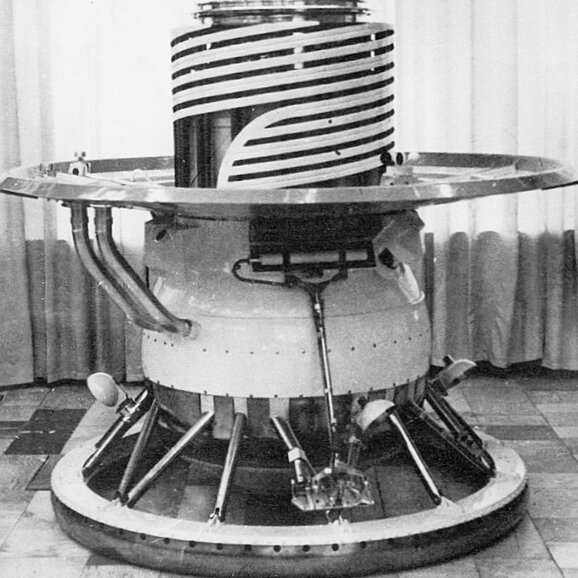

降下車両の着陸地点での金星の表面の画像を取得するために、パノラマカメラは、通常の温度と圧力の状態が長時間にわたって提供される気密の計器室に設置されました。 さらに、圧力が100気圧に達し、温度が500°Cになり、カメラに影響を与えない金星の表面に「光学窓」を作成する必要がありました。 これらの状況には、多くのオリジナルの技術および設計ソリューションが必要でした。 そのため、惑星に近づく2日前に、システムの内部冷却が行われました(-10°まで)。 表面での操作中の内部温度状況を安定させるために、低い熱伝導率、スクリーン真空断熱、および高い比熱と〜30°Cの融点を有する硝酸リチウム三水和物から作られた蓄熱装置を備えたセルラー複合材料が使用されました。 75分間の降下と金星の表面での1時間の作業の後、降下ビークル内の温度は初期の-10°Cから60°Cに上昇しました。
構造レイアウトスキームに大きな影響を与えたのは、カメラの必要な視野と表面の解像度を提供することに関連する一連のタスクでした。 にちなんで名付けられたNGOで Lavochkina(デバイスの開発者)は、カメラを機器コンテナの上部ゾーンに配置するのに最も適切であると認められました。 ただし、近距離および遠距離の両方の画像を送信する必要があるため、カメラのパンの軸は着陸装置の垂直軸に対して50度傾けられていました。 この場合、表面からカメラまでの最小距離は約1 mであったため、テストコントラスト画像が適用されたデバイスの一部はカメラの視野に入るはずです。 このようなカメラの配置により、大気の透明度が低い表面画像を取得し、惑星の表面の測光特性を決定することができました。また、良好な気象条件の場合、金星のかなりの表面積をカバーするパノラマを取得できました。
カメラの設置場所の計器室の外側に、円筒形の光学式port窓がありました。

hole窓は厚さ10 mmの厚肉石英ガラスでできており、焦点距離は371 mm、透過率は95%です。 円筒形のport窓の内側には、走査ミラーを備えたカメラのペリスコープ装置がありました。 したがって、窓を貫通する主な熱流束は、チャンバーの上部にのみ作用し、電子機器には到達しませんでした。
所定の熱レジームを確保し、機器への高温の影響を排除するために、カメラと窓は、非熱伝導性および熱吸収性の構造要素を使用して機器コンパートメントに固定されました。 port窓は、必要な視野を確保するために、ビューイングカットアウトを除き、強力な断熱材で閉じられました。 検査用の切り欠きは断熱蓋で閉じられ、着火後にパイロデバイスの助けを借りてリセットされました。 これにより、第1に、下降中のチャンバーの熱レジームが確保され、第2に、窓ガラスが煙、降水ガス、熱放出ガスの凝縮、金星の大気からの不透明な降水から保護されます。
ソビエトのエンジニアは、月の乗り物で光学機械式パノラマカメラを使用して、前向き(Luna-E、Luna-13)と可動式(Lunokhod-1、Lunokhod-2)の両方で非常に良い経験をしたため、およびこれらのカメラ全体の光学的および電気的特性が金星ミッションのニーズに対応していたため、それらを使用することが決定されました。 外部環境で直接動作する月の部屋とは異なり、この場合、唯一のものは、金星に特に厳しい気候の影響から保護されました。
カメラアセンブリ:

光学機械式パノラマカメラは、走査型望遠計の原理を使用しています。 カメラの主な要素とデバイスへのインストール:

前述のように、カメラは密閉された断熱ケース内に配置されていました。 表面は円筒形の窓を通して射撃され、その内部には走査ミラーとその駆動要素が設置されています。 40x180°の公称角度での周囲の表面のレビューは、スキャンミラーの2つの動き(パン軸の周りの回転と、この軸を通る平面でのスイング)によって実行されます。 低照度条件または非常に低いコントラストでの画像取得の信頼性を高めるために、2つの人工光源を外部に設置し、パノラマの2つのセクターの局所表面領域を照らしました。
カメラデバイス:
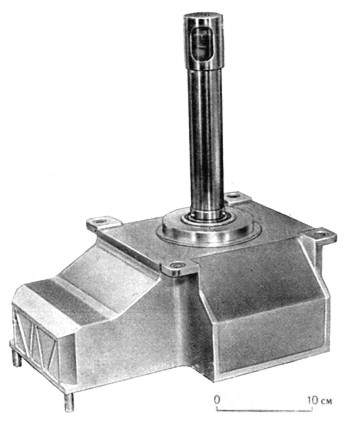
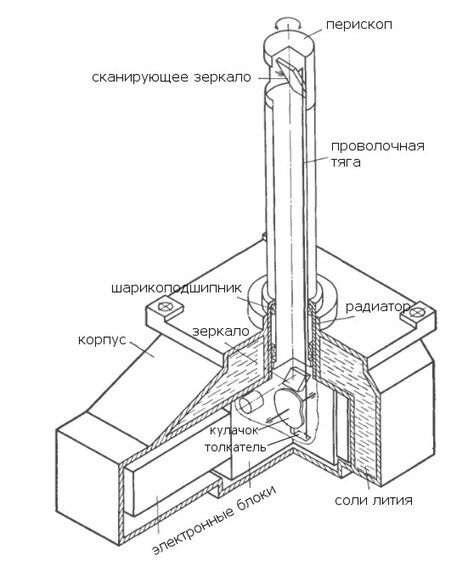
構造的には、カメラは本体と潜望鏡デバイスの2つの部分に分かれています。 潜望鏡は、断熱シェルを越えてスキャンミラーを持ち、温度が475°に達する可能性のある領域にあります。 電子部品と光学システムを備えた本体は、動作温度が40〜50°Cを超えていない場所にあります。 潜望鏡装置は、熱伝導率の低い材料で作られた薄肉パイプの形で作られています。 カムとプッシャーからのミラーのスイングは、長さ250 mmの線材を通して行われました。 パノラマビュー中に回転するペリスコープチューブはボールベアリングに取り付けられ、その間にラジエーターが配置され、身体への熱伝達が行われました。 ケース自体では、高い熱容量を持つ硝酸リチウム三水和物で満たされた気密空洞が全周に作られました。
カメラの光学設計:
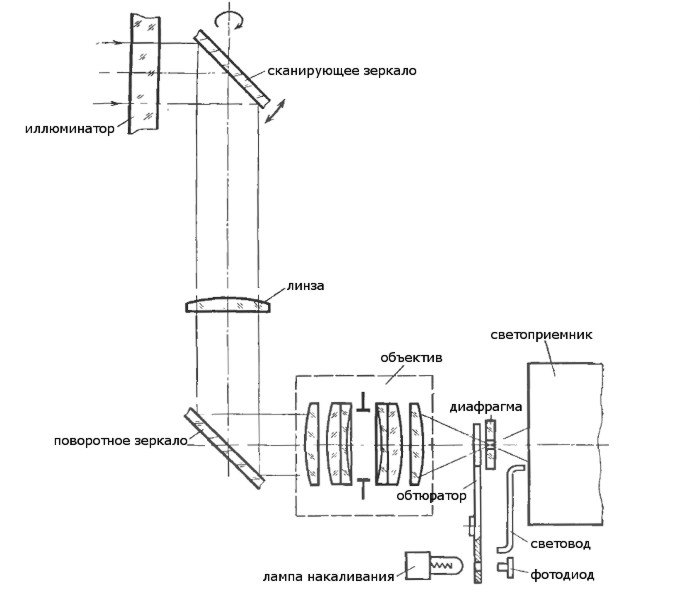
ポートホールは円柱レンズであるため、ポートホールを通過する表面からの光線は、矢状断面で発散します(上の写真を参照)。 発散ビームは走査ミラーに当たり、それから反射されて、円柱レンズの前部に入射し、その前方焦点はポートホールの後方焦点と一致します。 レンズの後、ビームは再び平行になり、回転ミラーで反射され、28 mmの焦点距離と1:2の相対口径でレンズを通過します。 画像平面には絞りがあり、これはカメラの絞り特性を形成する展開要素です。 絞りの後、ビームは光検出器に当たります。 フライバック時、光束はシャッターのシールによって遮られます。 同時に、フォトダイオードは、閉塞具の開口部から白熱灯で照らされ、電気的インパルスを形成して戻りストロークを開始します。 逆に、機器は校正されます。 この目的のために、明るさが安定したランプからの光は、ライトガイドを使用して受光器に送られます。
スキャンミラーが振動(ラインスキャン)し、線角速度と行周期の10%の反転ストロークで±20°の角度で光線を偏向します。 同時に、スキャンミラーはパン軸を中心に回転します。 カメラの設計により、360°の角度で完全なパノラマビューを実行することができましたが、装置自体の要素によって遮られない視野は約2倍小さいため、パノラマスキャンは180±4°の角度に制限されます。
光学機械部品は直流モーターによって駆動され、その回転速度は、搭載されたクロナイザーから供給される周波数に基づいたサーボシステムによって安定化されました。 公称角度解像度21 'は、ラインの115要素の明瞭さに対応します。これは、カメラの開口特性ではなく、ビデオ信号のサンプリング周波数(水平方向)および指定されたパノラマスキャンステップによって制限されます。 近距離領域で21 'の角度分解能を使用すると、約10 mmの寸法を持つ表面の詳細を検出でき、数倍大きい寸法の詳細を確実に区別する必要があります。 カメラレンズは過焦点距離に設定されているため、800 mmの距離にある物体とport窓から遠い物体、つまり、着陸プラットフォームの端を含むパノラマビューのすべての領域にある物体の鮮明な画像を取得できます。
カメラの主なパラメーター:
| 行内の要素の数(戻りなし) | 115 |
| パノラマの行数 | 517±13 |
| 逆のアイテム数 | 13 |
| ストリング転送時間、s | 3,5 |
| パノラマ転送時間、分 | 30±0.9 |
| 密度範囲 | 0-1.2(1-5) |
| ビデオ量子化レベルの数 | 64(6ビット) |
| 重量、kg | 5.8(リチウム塩を含む-2.1 kg) |
| 消費電力 | 5 |
これは、生のパノラマの外観です。

ノイズを除去した後、このパノラマは次のようになり始めました。

一部の愛好家は、未処理の6ビットデータを含むフィルムを見つけ、それに応じて独自に再構成しました。 ドンミッチェルの最も有名な作品:

彼はまた、 「Venus-10」、「Venus-13」および「Venus-14」 の画像の再構成に関する作業を実施しました。
そして、私は物語を金星-13からの印象的なカラー画像で仕上げたいと思います。 ソビエト学派が頻繁に失敗したにもかかわらず、天文学で行ったブレークスルーは忘れられず、ロシアの新世代の科学者が宇宙の研究に貢献するだろうと心から信じたい。

PS関心のあるすべての人にとって、私はドン・ミッチェルのサイトを強くお勧めします。このサイトは 、金星の初期写真を処理するだけでなく、ソビエトの宇宙船とその科学機器に関する多くのユニークな情報も収集しました。