そこで私は自分のプロジェクトについて書き、人々がそれについてどう思うかを聞くことにしました。 DIYやロボティクスで書くのに十分なカルマはありませんが、必要なカルマに住んでいるなら後で転送できるかもしれません
2人の友人と私は、3Dプリンティング、Linux、オープンテクノロジーの愛好者として、ナビゲーション、制御、コンピュータービジョン、その他の一般的なロボットタスクの実験用に設計された「Wind」という小さなロボットを作りました 。
私たちの主な目標は、基本的な機能セットを提供し、特定のプロジェクトのニーズに合わせて簡単に変更できるプラットフォームを作成することでした。 この目標を達成するために、3D印刷技術を使用してケースを作成することが決定されました。 これにより、新しいセンサーとアクチュエーターを簡単に統合できます(たとえば、Kinektセンサーをインストールします)。 LinuxとBeagleBoard-xMオープンハードウェアプラットフォームを使用すると、変更や拡張の可能性が広がります。
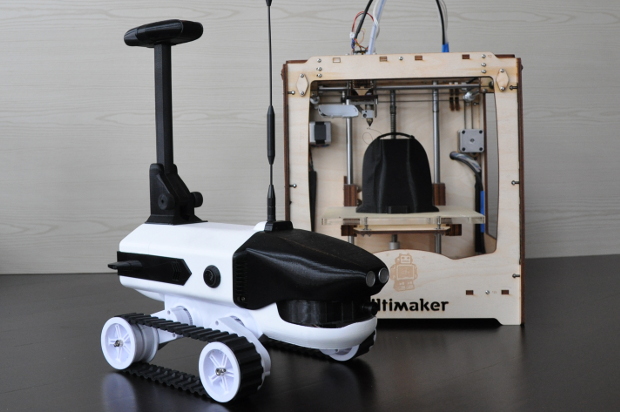
これは、3Dプリンターの背景にあるロボットオプション(カメラ1台付き)の1つです
Windロボットには、回転プラットフォームに搭載された2台のビデオカメラ、デジタルチルト補正コンパス、4台の超音波距離計、WiFiまたはUMTSを介した通信機能、GPS受信機、光センサーなど、さまざまなセンサーが搭載されています。 BeagleBoard-xMをオンボードコンピューターとして使用すると、h264形式の適応型リアルタイムビデオ圧縮 (統合信号プロセッサを使用)、オンボードエレクトロニクスの制御、およびナビゲーション用のかなり複雑なアルゴリズムの実行に十分な処理能力が提供されます 。 同時に、ARMアーキテクチャの経済性のおかげで、ロボットはスタンドアロンの電源モードで1.5〜2時間動作できます。

実装されたソフトウェアモジュールのセットは、ネットワーク経由でインストールされたすべてのセンサーとアクチュエーター(モーター)への簡単で便利なアクセスを提供します。 このため、ロボットは手動モードでリモートで、完全に自律的に(オンボードコンピューターで制御プログラムを実行して)、またはインターネットを介してリアルタイムでセンサーからデータを受信して制御できます(クラウドロボット工学)。 インターネットを介した手動制御モードの場合、カメラからのビデオストリームを含むオンボードセンサーからのデータを表示するプログラムが表示されます。 このプロジェクトの興味深い機能は、 Xenomaiの使用です。これは、Linuxカーネルを実行するリアルタイムプログラムの実行で大幅に高い精度を達成できるシステムです。 特に、著者はXenomaiの機能を使用してLinuxドライバーを実装しました。これにより、高品質のモーター制御を実現できました。 また、Xenomaiを使用すると、制御機能をLinuxに転送することで、センサーとモーター制御を操作するための電子機器を大幅に簡素化することができました。
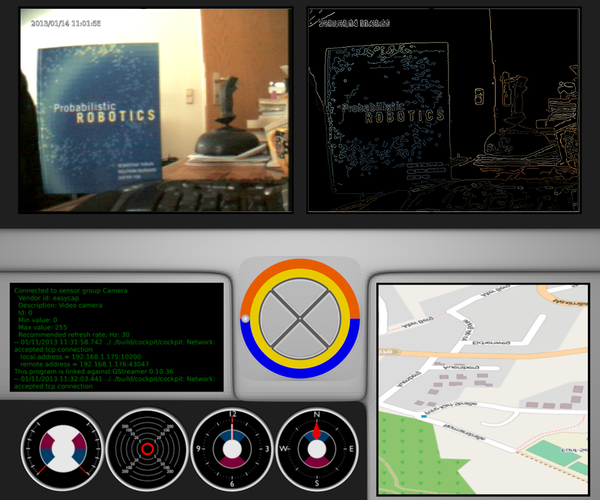
ロボットの手動制御プログラム
また、提供されたソフトウェアインターフェイスを使用して、ロボット工学の分野での典型的なタスクを解決する方法を示す一連の例を作成しました。

これは、デザイナーがあらゆる種類の展示会に参加するために作成したポスターです。
これとは別に、プログラマーや電子技術者に加えて、このプロジェクトは、代替住宅オプションの3Dモデルの作成に積極的に参加した3Dデザイナーの注目を集めました。 例は、WebサイトBlender3D.ruにあります。
冒頭で既に述べたように、3Dプリンティング、電子機器およびソフトウェアのすべてのモデルは、プロジェクトWebサイトveterobot.orgで提供されるリンクから入手できます。