内容:
- マイクロエレクトロニクスとの最初の接触。
- 非プログラマブルロジックエレメントでの自動車の構築。
- STM32の使用を開始する。 開発環境。 マイクロコントローラーをマシンに接続します。
- 前輪の回転角度を決定します-ADCを介したフィードバック。
- DACを使用してサウンドを再生します。
1.マイクロエレクトロニクスとの最初の接触
理由は関係ありませんが、電話からのコマンドを受け付けるデバイスを作成するという考えが生まれました。 どうやってやるの? Bluetooth、WiFi、USBなどを介して可能です。 しかし、携帯電話の出力からヘッドセットに送られる音を認識する方が簡単で、より普遍的であるように見えます(以下、問題の解決のために、最も単純な実装、結果指向の方法が選択されます)。
サウンドはスマートフォン用の特別なプログラムで合成できますが、興味深いオプションがあります-DTMF信号。 これらは標準であり、すべての携帯電話およびほとんどの固定電話(番号をダイヤルするときまたは音声メニューで)で使用され、音声チャネルで問題なく送信されます。
タスク1:DTMF信号認識
DTMF復号化を実装するための3つのオプションがインターネットから印刷されています(私の考えは新しいものではありません)。 購入されます:
- MT 8870DEデコーダー-入力アナログ信号から最後に認識されたDTMFコマンドのバイナリコード(4ビット)と、1ビット-DTMFコマンドの有無(今度は「5番目の出力」と呼びます)を受け取ります。
- デコーダーの動作に必要な水晶振動子、コンデンサー、抵抗器。
- 7セグメントインジケータ-電話で押された番号を表示します。
- 7セグメントインジケーター用KR 514ID-1デコーダー-バイナリコードから、セグメントごとに7つの出力を受け取ります。
- はんだ付けせずに実装するための開発ボード。
- ブレッドボードの配線/ジャンパー。
エラーを収集、検証、修正します...動作します。 ショック。
ここで、これらすべてを強制的にマシンを制御する必要があります。 さらに、マシンのアクションが押された番号に論理的に対応するように:2-前方、4-左側、6-右側、8-後方。
タスク2:DTMFデコーダーからの信号の4つの特定の組み合わせは、4つの機能のいずれかをアクティブにする必要があります
最も単純なオプションは、10進デコーダーです。 オープンコレクター付きのK155ID10を購入しました-バイナリコード用の4つの入力、10の出力は0〜9の数字を表し、目的の出力は「0」、残りは「1」になります。 このデコーダーは負荷で使用され、動作電流は80 mA(白熱電球、リレー)に達することができ、便利です。 トランジスタはまだ使用する必要がありましたが。
タスク3:モーターの極性反転、Hブリッジ
子供の頃はすべて、レゴから車を集めました。レゴは、電池の極性を手動で切り替えることで行き来しました(モーターとリモコン付きのレゴセットはありませんでした)。 さあ、大人のおもちゃを遊ぶ時間です。
普通の人はトランジスタでHブリッジを作ります。 高度-これらと同じトランジスタでターンキーソリューションを購入します。 私は電磁継電器を切り替えました。 後で強力な(最大3Aのコレクタ電流用)NPNおよびPNPトランジスターTIP31 C STおよびTIP32 C STを購入し、それらからこのHブリッジを組み立てましたが、何らかの理由でオンボードLEDでのみ動作し、モーターはオンになりませんでした力。 理由はわかりません。
スイッチングリレーには、モーターごとに2つ必要です(トランジスタまたはクローズリレーには4つ必要です)。 デフォルトでは、モーターの両方の接点(玩具のように通常のコレクター)はマイナスに接続されています。 制御信号がリレーの1つに適用されると、モーター接点がプラスに切り替わり、モーターが作動を開始します。 このような接続の大きな利点は、どのような状況でもリレーの故障のために短時間で短絡することさえできないことです。 欠点は、制御電圧がリレーから除去されると、モーターが短絡してブレーキになることです。 解決策は、別のリレーを閉じることです。 さて、モーターを回転させるには、フリーランニングのためにそれを閉じる必要があります-それを開いて、「ブレーキ」のために-それを再び閉じます。 このリレーは後で追加されます。
タスク4:タイプライターを組み立てる
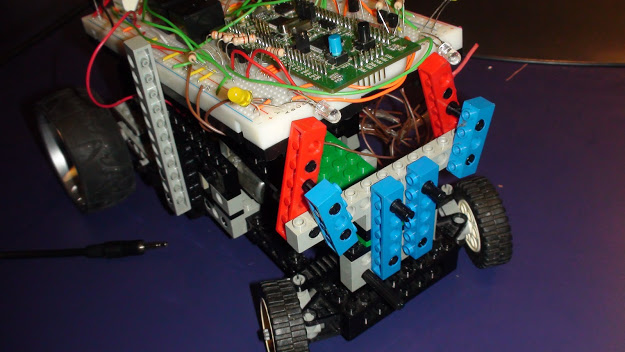
マシンには2つのモーターがあります。1つはレゴディファレンシャルを介して後輪を回転させ、2つ目は前輪を回転させます。 ギアボックス内のプラスチックギアはシステムの効率を向上させませんが、すべて機能します。
ボードに4つのリレーを配置します。 ブレッドボードは高電流用に設計されていない(各モーターは1〜1.6 Aを消費する)と言われましたが、短時間で結果が得られない場合、プロジェクトは次のエアロックを維持するリスクがあります。 ちなみに、リレーを含めると電圧サージが発生し、ループと誤動作が発生しました。 確かにこれは特別なスキームによって解決されますが、私はバッテリーを備えた別のユニットからモーターに電力を供給しました。
電磁リレー、2つの電源-あまりにもハードコアはありませんか? さらにもっと!
これらすべてを10進デコーダーに接続することは残ります。 必要な結論は、4つのNPNトランスフォーマーBC547のエミッターであり、そのベースには、DTMFデコーダーからキーが押されたという信号(「5番目の出力」)、コレクター、各リレーがあります。 曲がった、奇妙な、しかしそれは動作します。


2.非プログラマブルロジックエレメントでの自動車の構築
マシンが同時に乗ることと回転することができるはずだと仮定します。 論理的には、1、3、7、9の数字を使用すると、2つのリレーがトリガーされます。 最初は、トランジスタエミッタから10進デコーダーにダイオードを接続してこれを実装する予定でしたが、うまくいきませんでした。 10進デコーダーが「0」を指定した場合、この「ゼロ」で開くPNPトランジスタが必要であることがわかりました。 しかし、NPNしかありませんでした。
タスク5:1、3、7、または9を押すと、マシンが移動して回転するはずです。
エンターテインメント/開発/使用の目的で、論理要素4-I、4-OR、NOT、AND-NOT、OR-NOT、およびANDを1つずつ購入しました。 最初の考えは、10進数デコーダーからの出力とDTMFデコーダーからの「5番目の出力」を単純な論理回路で使用することで、最終的に必要なトランジスター(およびそれらを介して)を開きます。 しかし! 「ユニット」としての10進復号器K155ID10は、何かで2ボルトを生成します。 自由に使える論理要素はどれも、そのような信号を「ユニット」と見なしませんでした。 4-I(KR1533)を除く。 DTMFで「裸の」4ビットのバイナリコードを使用すると、利用可能な要素から必要なロジックを組み立てることができませんでした。 通常の10進数の復号化機能は、タスクを何度も促進します。 そして、それはそのような小さなm笑になりました-するのは難しいですが、できます! (午前中に寝て詳細を調べるという考えは拒否されました)。
10進デコーダーは、復号化された数値の出力を除くすべての結論に「アンデッド」を与えることを思い出して、次のことを行います。
最初に... m ... 4-I要素の入力のカルテットで、数字1、2、3、および「ユニット」を指定します。 2番目-7、8、9、および「ユニット」。 最初の出力から、1、2、または3が押された場合(車が前進する場合)、2番目の出力から-7、8、9(戻る場合)から「ゼロ」が得られます。 それ以外の場合、4-I要素の出力は両方とも「ユニット」です。
今回る。 残りの5つのロジックエレメントを使用して、トリッキーな回路を収集します。 4と6の数字を拒否することにしました(その場で車輪を回すのはなぜですか?!)が、1と7(左)、3と9(右)だけのターンのダイアグラムを作成することさえできました。
その結果、ボード上(別のものを購入する必要がありました)、DTMFデコーダー、インジケーター、そのデコーダー、10進数デコーダー、4-AND、NOT、4-OR、OR-NOT、AND-NOT、4トランジスタ、4リレー。
マシンは6つの異なるコマンドを実行しますが、前輪を中央に戻す方法を知りません。 LEGOパーツの効率と低いモーター出力により、リターンスプリングやゴムは使用できません。
リレーは時々数回クリックしますが、理由は明らかではありません(干渉?)。
ロジックを操作するロジックがマスターされました。

3. STM32の使用を開始する
開発環境
配線プログラミングからコードプログラミングに切り替えましょう。 プログラム可能なマイクロコントローラ/チップについては、Raspberry Piが強力すぎる、Arduinoが高価であり、一般的ではないという漠然とした考えしかありませんでした。 その時、売り手であるミハイルは、579ルーブルのSTM32VLDiscoveryを私に書いた。 ここでの彼についてだけでなく 、 彼らがすでに書いたものであり、彼の研究で本当に助けになりました。
コントローラはブレッドボードに固定できますが、いずれにも固定できません。 同時に、6本の足がぶら下がったままになります-まだ数十本あるので、それらを使わずに行うことができます。 プログラムがデバイスに入ったミニUSBコードからボードを切断することなく、メモリにダウンロードされたプログラムの機能を確認することもできます。 そして、あなたはそれから食べることができます。
CooCoxのCoIDE環境では、タンバリンとのダンスが1回だけ必要でした。特定のファイルを特定のフォルダーに手動でダウンロードすることは、作業を開始するための最適な選択のようです。 確かに、ファームウェアをデバイスにアップロードできませんでした。ボードメーカーのST-LINKユーティリティを使用する必要があります。 彼らは便利なSublime Text 2から直接コンパイルできると言っていますが、命令の長さは試してみるにはあまりにも懐疑的でした。
私がCで書いたことがないことを考えると、最も単純な点滅するLEDでさえ大きな困難を引き起こしました。 さらに、不明瞭なレジスタ、16進システム、プルアップ抵抗器の目的を十分に理解していない人向けの出力と入力のさまざまな動作モード...しかし、誰かの既製の例のコピーアンドペースト方法がトリックを行いました。 次に、デバイスの価格により、ハードウェアの正しい接続に煩わされることがなくなります。 たとえば、各GND脚をグラウンドに接続する必要があるかどうか、および4本の指のバッテリーからデバイスに電力を供給することが有害かどうかはまだわかりませんでした。
コードにより近い。 ここでは他の人の例を引用したり説明したりはしませんが、私のベストプラクティスをいくつか紹介します。 それらは、Web上の特定の問題に対する許容可能な解決策がなかったときに登場しました。
タスク6:遅延
たとえば、LEDをオンにし、しばらくしてからオフにします。 多くの場合、遅延は何回も実行される空のループによって実装されます。 この方法は確かに単純ですが、LEDの点滅に加えて、ボードに何も必要ない場合にのみ適用できます。 サイクルのみを中断できますが、すみませんが、中断する(少し後で)か、サイクルを終了するための追加条件を設定します。 それ以外の場合、このサイクルが続く間、ボードは何もせず、何にも反応しません。
私が提案するのは、プログラムで必要なすべての遅延に対してメイン無限ループをすぐに使用することです。各パスは特定の変数の値を増やします(「x」と呼びましょう)。 変数が特定の値に達するとすぐに、サイクルの本体で特定の条件がトリガーされます(その数はいくつでも可能です)。 欠点は、そのような遅延がどれくらい続くかを事前に知らないことです。 これが問題にならない場合は、経験的に必要な値を選択して使用します。
コード
int main(void) { unsigned int x=0; char something; while(1) { if (x>5000) { // }; if (x==10000) { // . , x. }; if (something==1)// { x=0; // } if (x<15000) { x++; }; // x 0, x 15000. }; };
タスク7:指定された間隔での間隔
水晶振動子を変更せず、プロセッサー周波数が24 MHzのままであったとします。 特別な命令によって2400番目のプロセッサー数に達したときに割り込みを作成することにより、100 Hzの周波数(10ミリ秒ごと)でTIM6_DAC_IRQHandler関数(これは割り込みハンドラー)の実行を取得します。 以下のコードは元々どこかで取られています。
コード
unsigned int ti=0; int main(void) { // 6 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM6,ENABLE); TIM6->PSC = 24000 - 1; // 1000 TIM6->ARR = 10 - 1; // 10- TIM6->DIER |= TIM_DIER_UIE; // TIM6->CR1 |= TIM_CR1_CEN; // ! NVIC_EnableIRQ(TIM6_DAC_IRQn); // TIM6_DAC_IRQn }; // TIM6_DAC void TIM6_DAC_IRQHandler(void) { ti++; TIM6->SR &= ~TIM_SR_UIF; // }
この割り込みの主な目的は、10ミリ秒ごとに増加する変数tiを使用することです。 すぐに、割り込みはメインプログラムコードに「くさび」をかけるだけでなく、割り込みハンドラ内で毎回変化するため、変数tiの比較や割り当ての操作を歪める可能性があることがわかりました。 別の変数を変数tiの値に割り当てる代わりに、古い値の一部と新しい値の一部が割り当てられる状況が発生する場合があります。 Webで見つかった問題の解決策の中で、私はおよそ以下を強調しました。
- アトミック操作の使用(それらは中断されません)-int型の割り当てはそうではありませんが、「long」型を使用する必要があります。
- 特定の命令の実行中に割り込みが機能したかどうかを確認するための追加の変数またはレジスタの使用は、少し面倒であり、あまり明確ではありません(私にとって)。
- その他のオプション...
このような問題を解決しました。 変数 "ti"が「代入」されるまで、ローカル変数stiに割り当てます。 精度が基本的でない場合は、少し「バックラッシュ」を追加できます。
do { sti=ti; } while (ti>1+sti);
ローカル変数sti自体は、変数tiの値が必要な場所に同様のループを挿入しないためにのみ使用されます。
さらにプログラムでは、sti変数に恐れることなくアクセスし、ゼロにすることさえできます。 このすべてを使用して、このコマンドまたはそのコマンドがタイプライターに与えられる時間を修正し、後でタイプライターがルートを繰り返すことができるようにしました。 当然、ゼロ化は無駄にすべきではありません。したがって、メインプログラムループの最後に、簡単なコードが追加されました。
if (sti==0) { do { ti=0; } while (ti>1); }
割り当ての時点または終了条件のチェック時に、変数tiが変化し、誤った形式で「提示」されると、サイクルが繰り返されます。 割り込みレートが高いほど、ループを終了する条件が2回目にトリガーされる頻度が高くなります。 当然、中断の頻度が高すぎる場合、ループは長くかかりません。 失敗した割り当ての試行回数を制御するために、LEDを使用しました。
タスク8:ディスプレイとしてのLED
時々、プログラムを調整するために、デバイスの操作中に特定の変数の値を取得したいのですが、ディスプレイやインジケーターが手元にないか、それらを接続したくありません。 その後、LEDを必要な回数だけ点滅させたり、一時停止したり、再度点滅させたりすることができます。これらの目的のために、メインループの本文で次のコードを使用します。
// - if ((todisp>0) && (sti%10==0)) { if ((sti%(todisp*20+100)<todisp*20) && (sti%20<10)) { GPIOC->BSRR=GPIO_BSRR_BS8; } else { GPIOC->BRR=GPIO_BRR_BR8; }; };
プログラムの任意の時点で、変数をdisp、たとえば3に割り当てます。ボード上のLED No. 8が3回点滅し、シリーズ間で2回目の一時停止を行います。 変数stiは(変数tiを介して)10ミリ秒ごとにインクリメントされますが、代わりに変数xを使用して、メインループの各パスでインクリメントできます。 この場合、係数をわずかに増やす必要があります。
使用例
while (1) { do { sti=ti; todisp++; } while (ti>1+sti); todisp--; if ((todisp>0) && (sti%10==0)) { if ((sti%(todisp*20+100)<todisp*20) && (sti%20<10)) { GPIOC->BSRR=GPIO_BSRR_BS8; } else { GPIOC->BRR=GPIO_BRR_BR8; }; }; }
この例では、割り込みのために割り当て操作sti = tiが失敗し、比較操作ti> 1 + stiがtrueを返すたびに(比較時に割り込みが発生した場合にも起こります)、LEDが1回点滅します倍以上。 原則として、ボード操作のn分後にLEDが点滅する回数を測定し、平均サイクル時間(割り込みの頻度に基づいて)を計算することもできます。また、割り込みを使用する際のこれらすべての予防措置が決して不要であることを確認できます。
タスク9:マイクロコントローラーをマシンに接続します
LEDで十分な数の実験を行った後、徐々にそれらをホイールに変更できます。 古いベースロジック回路から最も必要なもののみを取得します。DTMFデコーダー、美容用デコーダー付きインジケーター、トランジスター付きリレーです。 最後に、10進デコーダーを忘れることができます!
DTMFデコーダーからの出力は、これらの目的のために選択したコントローラーの入力に接続されます。 コントローラーからの出力(再び、プログラムで選択および初期化)から抵抗器(たとえば、3 kOhm)を介して従来のNPNトランジスターのベースに出力(BC547を使用)。 エミッター-「プラス」コレクター-対応するリレーのコイル。 メインモーターのショート(「ブレーキ」モード)を防ぐ5番目のリレーを追加し、方向指示器/寸法を好みに合わせて調整します。 モーターの「プラス」は、別のバッテリーパックからリレーに接続されます。 回路とモーターの両方に電力を供給するために、私はそれぞれ4本の指電池/蓄電池用のプラスチックケース(2個)を使用します。 彼らはたった40ルーブルの費用がかかり、子供の頃私はいつもスコッチテープとホイルで苦しめられました...
DTMFデコーダーからのワイヤが、前後に移動するリレーの真上を通過することが判明しました。 おそらくこれは、リレーがオンになったときに既存の電力サージに干渉を追加します。 その結果、クラスメートへのプレゼンテーション中に、リレーは定期的に割れ始め、マシンはまったく戻ることを拒否しました-リレーはノンストップで切り替わり、均一な割れを発しました。 「プラス」の方向にリレーコイルに並列に接続されたダイオードは、この状況に影響しませんでした。 プログラムをファイナライズしています-10ミリ秒ごとに入力値をチェックし、5つの入力の組み合わせが連続して6回同じ場合にのみ変更に反応します。 目の遅延はほとんど感知できず、干渉の問題は解決されます。 これが、プログラマブルマイクロコントローラーの主な利点です!
4.前輪の回転角を決定する-ADC(アナログ-デジタルコンバーター)を介したフィードバック
第二部では、前輪を機械的に中央に揃えることはできないと述べました。 マシンは直線で走行できるはずなので、問題を解決する時が来ました!
タスク10:レオスタットを接続する
解決策はそれ自体を示唆しています-スプリングではない場合、ホイールを揃えるまでモーターを反対方向に回転させます。 手元にはデジタルエンコーダはありませんが、素晴らしい10kΩレオスタットがあり、ボードには12ビットADC(2でも)があり、インターネットには接続回路とコードがあります。 レオスタットの端を「プラス」と「マイナス」に、スライダー-1kΩ抵抗を介して入力に接続します。 ところで、ADCの目的のために、入力を使用することはできません。 例で指定されたものを使用しました。 サンプルコードは、ADCを含む各ライブラリのCoIDEで直接見つけることができます(CoIDEでADCライブラリを接続することを忘れないでください)。 コピーと貼り付けのコードは私のプログラムにあり、最も重要なことは、それが機能することです。
レオスタットを機械に取り付け、レオスタットシャフトを回転機構の「減速機」の出力シャフトと同軸に接続します。これはモーターから3番目です。 LEGO以外のパーツとLEGOパーツをペアリングするプロセスは常に実行されますが、モーターは依然としてレオスタットを回転させ、ホイールを回転させます。 困難を伴い、私は言わなければならない。 レオスタットからボードまで3本のワイヤが伸び、モーターから4本のワイヤが伸びています。
タスク11:レオスタットからのデータを使用する
経験的な方法では、0から4095の数値を選択します。これは、前輪を直接取り付けた場合の前輪の回転角の許容される左右の境界に対応します。 この範囲は不感帯と呼ばれているようです-その中で、車輪は中央で整列していると見なされます。 また、最大回転角に達したときにモーターをオフにする値を選択しました。
コード
js= 2500; // j — 0 4095 () gist=150; // full=500; // while (1) { //... if ((x>=max*7) && (inpok)) // inpok 0, . . if ((num==1) || (num==4) || (num==7)) // { GPIOC->BRR=GPIO_BRR_BR7; if (j>0+full) { GPIOC->BSRR=GPIO_BSRR_BS6; } else { if (j<0+full-gist) { GPIOC->BRR=GPIO_BRR_BR6; } } } else { GPIOC->BRR=GPIO_BRR_BR1; } if ((num==3) || (num==6) || (num==9)) // { GPIOC->BRR=GPIO_BRR_BR6; if (j<4250-full) { GPIOC->BSRR=GPIO_BSRR_BS7; // « » } else { if (j>4250-full+gist) { GPIOC->BRR=GPIO_BRR_BR7; // « » } } } else { GPIOC->BRR=GPIO_BRR_BR3; } // if ((num==2) || (num==5) || (num==8)) { if (j<js-gist*3) // { GPIOC->BRR=GPIO_BRR_BR6; // « » ( ) GPIOC->BSRR=GPIO_BSRR_BS7; // « » } else { if (j>js-gist*2) { GPIOC->BRR=GPIO_BRR_BR7; « » } }; if (j>js+gist*3) { GPIOC->BRR=GPIO_BRR_BR7; GPIOC->BSRR=GPIO_BSRR_BS6; } else { if (j<js+gist*2) { GPIOC->BRR=GPIO_BRR_BR6; } }; }; }; //.. }
機械が極端な条件で操作され、巨大な過負荷の影響下で、ホイールが適切なコマンドなしで突然回転角度を変更すると、同じコードが希望の位置に戻ります。 たとえば、4を押し、ホイールがすでに左端の位置にある場合、リレーはオンになりません。
思い出してください、いくつかのコードは他の誰かの例から取られました。
機械制御プログラムの最終コード
/** ***************************************************************************** * @title ADC_simple.c * @author Claude * @date 2010 Dec 29 * @brief ADC Example, Blink a LED according to ADC value ******************************************************************************* */ #include<stm32f10x_rcc.h> #include<stm32f10x_gpio.h> #include<stm32f10x_adc.h> #include "stm32f10x.h" #include "stm32f10x_conf.h" GPIO_InitTypeDef GPIO_InitStructure; ADC_InitTypeDef ADC_InitStructure; unsigned int i,j,js,gist,full,ti=0; /* Blink a LED, blink speed is set by ADC value */ int main(void) { unsigned int x,max; unsigned int move[10]; unsigned int oldsti=0,sti=0,time[10],tit=0; unsigned short recheck=5; unsigned char todisp=0,todisp2=0; x=0; unsigned char ji,ju,inp0,inp1,inp2,inp3,inpok,ink,in0,in1,in2,in3,inok,num,oldnum,back; max=250; inp0=0; inp1=0; inp2=0; inp3=0; inpok=0; ink=0; back=0; num=0; void backreset(void) { back=0; for (ju=0;ju<10;ju++) { time[ju]=0; move[ju]=0; } GPIOC->BRR=GPIO_BRR_BR9; } GPIO_InitTypeDef PORT,GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE); PORT.GPIO_Pin = (GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_10 | GPIO_Pin_11 | GPIO_Pin_12| GPIO_Pin_8 | GPIO_Pin_9); PORT.GPIO_Mode = GPIO_Mode_Out_PP; PORT.GPIO_Speed = GPIO_Speed_2MHz; GPIO_Init( GPIOC , &PORT); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // A GPIO_InitStructure.GPIO_Pin = (GPIO_Pin_9 | GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7); // GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOB, &GPIO_InitStructure); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); PORT.GPIO_Pin = (GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_5); PORT.GPIO_Mode = GPIO_Mode_Out_PP; PORT.GPIO_Speed = GPIO_Speed_2MHz; GPIO_Init( GPIOA , &PORT); // input of ADC (it doesn't seem to be needed, as default GPIO state is floating input) GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 ; // that's ADC1 (PA1 on STM32) GPIO_Init(GPIOA, &GPIO_InitStructure); //clock for ADC (max 14MHz --> 72/6=12MHz) RCC_ADCCLKConfig (RCC_PCLK2_Div6); // enable ADC system clock RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE); // define ADC config ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; ADC_InitStructure.ADC_ScanConvMode = DISABLE; ADC_InitStructure.ADC_ContinuousConvMode = ENABLE; // we work in continuous sampling mode ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; ADC_InitStructure.ADC_NbrOfChannel = 1; ADC_RegularChannelConfig(ADC1,ADC_Channel_1, 1,ADC_SampleTime_28Cycles5); // define regular conversion config ADC_Init ( ADC1, &ADC_InitStructure); //set config of ADC1 // enable ADC ADC_Cmd (ADC1,ENABLE); //enable ADC1 // ADC calibration (optional, but recommended at power on) ADC_ResetCalibration(ADC1); // Reset previous calibration while(ADC_GetResetCalibrationStatus(ADC1)); ADC_StartCalibration(ADC1); // Start new calibration (ADC must be off at that time) while(ADC_GetCalibrationStatus(ADC1)); // start conversion ADC_Cmd (ADC1,ENABLE); //enable ADC1 ADC_SoftwareStartConvCmd(ADC1, ENABLE); // start conversion (will be endless as we are in continuous mode) // debug information RCC_ClocksTypeDef forTestOnly; RCC_GetClocksFreq(&forTestOnly); //this could be used with debug to check to real speed of ADC clock // 6 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM6,ENABLE); TIM6->PSC = 24000 - 1; // 1000 // TIM6->ARR = 1000 ; // TIM6->ARR =4; TIM6->DIER |= TIM_DIER_UIE; // TIM6->CR1 |= TIM_CR1_CEN; // ! NVIC_EnableIRQ(TIM6_DAC_IRQn); // TIM6_DAC_IRQn j= 2500; js=j; gist=150; full=500; if (back==0) { for (ju=0;ju<10;ju++) { time[ju]=0; move[ju]=0; } } while (1) { // adc is in free run, and we get the value asynchronously, this is not a really nice way of doing, but it work! j = ADC_GetConversionValue(ADC1) ; // value from 0 to 4095 /* possible change : * ADC_ContinuousConvMode = DISABLE * then on the infinite loop, something like : * * ADC_SoftwareStartConvCmd(ADC1, ENABLE); // start ONE conversion * while(ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); // wait end of conversion * j = ADC_GetConversionValue(ADC1) * 500; // get value * */ do { sti=ti; } while (ti>1+sti); //if ((back!=2) || GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_9)) if (oldsti!=sti) { oldsti=sti; if (ink<recheck) { in0+=GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_5); in1+=GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_6); in2+=GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_7); in3+=GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_8); inok+=GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_9); ink++; if (ink==recheck) { ink=0; if ((in0==0 || in0==recheck) && (in1==0 || in1==recheck) && (in2==0 || in2==recheck) && (in3==0 || in3==recheck) && (inok==0 || inok==recheck)) { if (in0==recheck) { in0=1; } if (in1==recheck) { in1=1; } if (in2==recheck) { in2=1; } if (in3==recheck) { in3=1; } if (inok==recheck) { inok=1; } if ((back==2) && (inok==1)) { backreset(); } if ( (back!=2) && (back!=4) && ((inp0!=in0) || (inp1!=in1) || (inp2!=in2) || (inp3!=in3) || (inpok!=inok)) ) { x=0; inp0=in0; inp1=in1; inp2=in2; inp3=in3; inpok=inok; oldnum=num; if (inp0) // - { if (inp1) { if (inp2) { if (inp3) { num=15; } else { num=7; }; } else { if (inp3) { num=11; } else { num=3; }; }; } else { if (inp2) { if (inp3) { num=13; } else { num=5; }; } else { if (inp3) { num=9; } else { num=1; }; }; }; } else { if (inp1) { if (inp2) { if (inp3) { num=14; } else { num=6; }; } else { if (inp3) { num=10; } else { num=2; }; }; } else { if (inp2) { if (inp3) { num=12; } else { num=4; }; } else { if (inp3) { num=8; } else { num=0; }; }; }; }; }; } in0=0; in1=0; in2=0; in3=0; inok=0; } } }; // if ((todisp>0) && (sti%10==0)) { if ((sti%(todisp*20+100)<todisp*20) && (sti%20<10)) { GPIOC->BSRR=GPIO_BSRR_BS8; } else { GPIOC->BRR=GPIO_BRR_BR8; }; }; if ((todisp2>0) && (sti%10==2)) { if ((sti%(todisp2*20+100)<todisp2*20) && (sti%20<10)) { GPIOC->BSRR=GPIO_BSRR_BS9; } else { GPIOC->BRR=GPIO_BRR_BR9; }; }; // if ((num==12)) { switch (back) { case 0: if (inpok) { back=3; }; break; case 3: if (!inpok) { back=4;ji=0;inpok=0;x=0; sti=0; }; break; default: ; } }; if (back==4) { if (inpok==0) { while ((move[ji]<1) && (ji<10)) { ji++; }; if ((ji<10)) { if ((sti>100)) { x=0; sti=0; num=move[ji]; tit=time[ji]; inpok=1; GPIOC->BRR=GPIO_BRR_BR8; GPIOC->BSRR=GPIO_BSRR_BS9; } } else { backreset(); } } else { if (sti>tit) { inpok=0; sti=0; x=0; ji++; GPIOC->BSRR=GPIO_BSRR_BS8; } } }; // if ((num==10)) { switch (back) { case 0: if (inpok) { back=1; }; break; case 1: if (!inpok) { back=2;ji=9;inpok=0;x=0; sti=0; }; break; default: ; } }; if (back==2) { if (inpok==0) { if ((ji>0) && (move[ji]>0)) { if ((sti>100)) { x=0; sti=0; num=move[ji]; if (num<4) { num+=6; } else { if (num>6) { num-=6; } } tit=time[ji]; inpok=1; GPIOC->BRR=GPIO_BRR_BR8; GPIOC->BSRR=GPIO_BSRR_BS9; } } else { backreset(); } } else { if (sti>tit) { inpok=0; x=0; sti=0; ji--; GPIOC->BSRR=GPIO_BSRR_BS8; } } }; // "*" if (num==11) { backreset(); } if ((x==3*max)) { GPIOC->BRR=GPIO_BRR_BR12; if ((!inpok) || (num<1) || (num>9)) { GPIOC->BRR=GPIO_BRR_BR6; GPIOC->BRR=GPIO_BRR_BR7; GPIOC->BRR=GPIO_BRR_BR10; GPIOC->BRR=GPIO_BRR_BR11; } if ((back!=2)&&(back!=4)) { in0=inp0; in1=inp1; in2=inp2; in3=inp3; inok=inpok; } if ((move[9]>0)&&(move[9]<10)&&(!inpok)&&(back!=2)&&(back!=4)) { for (ju=0;ju<9;ju++) { time[ju]=time[ju+1]; } time[9]=sti; }; }; if ((x==5*max) && (inpok)) { if ((1<=num) && (num<=9)&&(back!=2)&&(back!=4)) { for (ju=0;ju<9;ju++) // { move[ju]=move[ju+1]; } move[9]=num; sti=0; // , }; if ((num==1) || (num==2) || (num==3)) { GPIOC->BRR=GPIO_BRR_BR10; GPIOC->BSRR=GPIO_BSRR_BS11; GPIOC->BSRR=GPIO_BSRR_BS2; } else { GPIOC->BRR=GPIO_BRR_BR11; }; if ((num==7) || (num==8) || (num==9)) // { GPIOC->BRR=GPIO_BRR_BR11; GPIOC->BSRR=GPIO_BSRR_BS10; GPIOC->BSRR=GPIO_BSRR_BS2; } else { GPIOC->BRR=GPIO_BRR_BR10; }; }; if ((x>=max*7) && (inpok)) // inpok 0, . . { if ((num==1) || (num==4) || (num==7)) // { GPIOC->BRR=GPIO_BRR_BR7; if (j>0+full) { GPIOC->BSRR=GPIO_BSRR_BS6; } else { if (j<0+full-gist) { GPIOC->BRR=GPIO_BRR_BR6; } } } else { GPIOC->BRR=GPIO_BRR_BR1; } if ((num==3) || (num==6) || (num==9)) // { GPIOC->BRR=GPIO_BRR_BR6; if (j<4250-full) { GPIOC->BSRR=GPIO_BSRR_BS7; } else { if (j>4250-full+gist) { GPIOC->BRR=GPIO_BRR_BR7; } } } else { GPIOC->BRR=GPIO_BRR_BR3; } // if ((num==2) || (num==5) || (num==8)) { if (j<js-gist*3) // { GPIOC->BRR=GPIO_BRR_BR6; // « » ( ) GPIOC->BSRR=GPIO_BSRR_BS7; // « » } else { if (j>js-gist*2) { GPIOC->BRR=GPIO_BRR_BR7; « » } }; if (j>js+gist*3) { GPIOC->BRR=GPIO_BRR_BR7; GPIOC->BSRR=GPIO_BSRR_BS6; } else { if (j<js+gist*2) { GPIOC->BRR=GPIO_BRR_BR6; } }; }; }; if ((x==max*15)) { if (((num==1) || (num==2) || (num==3) || (num==5) || (num==7) || (num==8) || (num==9))&&(inpok)) // { GPIOC->BSRR=GPIO_BSRR_BS12; } else { GPIOC->BRR=GPIO_BRR_BR12; } x++; } else { x++; if (x>max*20+300000) { if (!inpok) { GPIOC->BRR=GPIO_BRR_BR2;// } x=max*20+1; } } // if (x%80000<40000) { if ((num%3==1) && (inpok) && (num<10)) { GPIOC->BSRR=GPIO_BSRR_BS1; } else { GPIOC->BRR=GPIO_BRR_BR1; } if ((num%3==0) && (inpok) && (num<10)) { GPIOC->BSRR=GPIO_BSRR_BS3; } else { GPIOC->BRR=GPIO_BRR_BR3; } } else { GPIOC->BRR=GPIO_BRR_BR1; GPIOC->BRR=GPIO_BRR_BR3; } if (sti==0) { do { ti=0; } while (ti>1); } }; return 0; }; // TIM6_DAC void TIM6_DAC_IRQHandler(void) { ti++; TIM6->SR &= ~TIM_SR_UIF; // UIF }


次のように機能します。
5. DAC(デジタル-アナログコンバーター)を使用してサウンドを再生する
ADCはマスタリングされているため、DACを注意せずに放置しないでください。 教育や娯楽の目的で使用する最も明白な方法は、音を生成するように思えます。 開発順序は古典的です。Webで既製のサンプルを見つけて実行し、「すごい!」、コードを変更します。
スピーカーをNPNトランジスタのプラスとコレクタに接続しました。DACが抵抗を介して出力されるレッグからの信号は、トランジスタのベースに到達します。 理論的には、スピーカーは極性が変化する音の周波数の電気信号で駆動されますが、スピーカーには一方向にのみ電流を供給します。 2つのトランジスタについて異なる回路を試しましたが、音に大きな違いは聞こえませんでした。 おそらく、適切なスキームを見つけられなかったのでしょう。
最初の音は、 この例を使用して取得されました。
サンプルコード
#include "stm32f10x.h" #include "stm32f10x_rcc.h" #include "stm32f10x_gpio.h" /* , DAC */ const uint16_t sin[32] = { 2047, 2447, 2831, 3185, 3498, 3750, 3939, 4056, 4095, 4056, 3939, 3750, 3495, 3185, 2831, 2447, 2047, 1647, 1263, 909, 599, 344, 155, 38, 0, 38, 155, 344, 599, 909, 1263, 1647}; unsigned char i=0; int main(void) { /* */ RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); /* */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_DAC, ENABLE); /* 6 */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM6,ENABLE); /* */ GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; GPIO_Init(GPIOA, &GPIO_InitStructure); /* */ TIM6->PSC = 0; TIM6->ARR = 500; TIM6->DIER |= TIM_DIER_UIE; // TIM6->CR1 |= TIM_CR1_CEN; // ! NVIC_EnableIRQ(TIM6_DAC_IRQn); // TIM6_DAC_IRQn /* DAC1 */ DAC->CR |= DAC_CR_EN1; /* */ while (1) { } } /* 6 */ void TIM6_DAC_IRQHandler(void) { TIM6->SR &= ~TIM_SR_UIF; // UIF DAC->DHR12R1=sin[i++]; // if (i==32) i=0; // 32 }
プログラムコードに基づいて食品の周波数を計算し、結果をチューナーと比較するとよいでしょう。 プロセッサー周波数:24,000,000 Hz。 タイマーTIM6-> PSCは、ゼロに達するとリセットされます。 すべてのビート。 タイマーTIM6-> ARRは500にカウントされます。 割り込みは、501回目のリセットごとにトリガーされますTIM6-> PSC-この場合、(24 000 000 Hz / 1)/ 501≈47 904 Hzです。 これは、将来のオーディオ信号のサンプリング周波数です 。 , - mp3 44 100 . , , — 16 12. , .
— , 32 sin. : 47 904 / 32 ≈ 1 497 . ( 5 ), … «!». F#6, , : 1 497,1 .

12:
なぜなら , - . -, . , 5 , 10 . :
TIM6->PSC = 23; // 1 M
TIM6->ARR = 99; // PSC 23 ARR 99 100 (10 )
, , — 27,5 . , (440 , ),
 11 ( ). ( 12 n ).
11 ( ). ( 12 n ).
: , Excel . , . . , (), . 2 400 . Excel, , :
- , 12 ( ).
- ( — 27,5 ) (# — +1 , — +2 , — +12 ).
- , 10 000 , 10 000 .
- .
- 0 4095, .
. 結果:
// const uint16_t noteC[]={ 76,2216,2383,2547,2709,2865,3017,3162,3299,3428,3547,3657,3755,3842,3917, 3979,4028,4064,4086,4095,4090,4070,4038,3991,3932,3860,3775,3679,3572, 3455,3328,3193,3050,2900,2744,2584,2419,2253,2085,1917,1749,1584,1422, 1264,1111,965,826,695,574,462,361,271,194,129,76,38,12,1,3,19,49,92,149, 218,300,393,498,613,738,871,1013,1161,1316,1475,1639,1805,1973 };
// const uint16_t noteCd[]={ 72,2226,2402,2576,2746,2911,3069,3220,3361,3493,3614,3722,3818,3901,3970, 4024,4063,4087,4095,4088,4065,4027,3974,3907,3825,3730,3622,3503,3372, 3231,3081,2924,2759,2590,2416,2239,2061,1883,1706,1532,1362,1196,1038, 887,744,612,490,381,284,200,130,75,35,10,0,6,27,64,116,182,263,357,464, 583,713,853,1002,1159,1323,1492,1666,1842,2020 }; const uint16_t noteD[]={ 68,2236,2423,2607,2786,2959,3124,3280,3425,3559,3680,3787,3879,3955,4016, 4059,4086,4095,4087,4061,4018,3959,3883,3792,3686,3566,3432,3288,3132, 2968,2795,2617,2433,2246,2057,1869,1682,1498,1318,1145,980,823,677,543, 421,314,221,143,82,38,10,0,7,32,74,133,207,298,403,523,655,799,954,1118, 1291,1469,1652,1839,2028 }; const uint16_t noteDd[]={ 63,2247,2445,2639,2828,3009,3181,3342,3490,3625,3745,3849,3935,4003, 4053,4084,4095,4087,4059,4012,3946,3862,3761,3643,3510,3363,3204, 3034,2854,2666,2473,2275,2076,1876,1678,1483,1293,1111,938,775, 625,488,366,260,171,100,48,14,0,6,31,76,139,220,319,434,565,710, 868,1037,1215,1402,1594,1792,1991 }; // const uint16_t noteE[]={ 60,2259,2469,2673,2872,3061,3239,3405,3556,3691,3809,3907,3986,4044,4080, 4095,4087,4058,4008,3936,3844,3733,3604,3458,3297,3122,2937,2741,2538, 2330,2119,1907,1697,1490,1289,1097,914,744,588,447,324,219,133,69,25, 3,3,24,68,133,218,323,446,586,742,912,1095,1287,1488,1694,1905 }; const uint16_t noteF[]={ 57,2272,2493,2709,2917,3115,3300,3470,3623,3756,3870,3961,4029,4074, 4094,4089,4060,4007,3930,3831,3710,3569,3410,3234,3044,2842,2631, 2413,2190,1965,1742,1522,1309,1104,911,731,567,421,295,189,106,47, 11,0,14,51,113,199,306,434,582,748,929,1123,1329,1543,1763,1987 }; const uint16_t noteFd[]={ 54,2285,2519,2747,2966,3172,3362,3536,3689,3820,3927,4008, 4063,4091,4092,4065,4010,3929,3823,3693,3540,3367,3177, 2971,2753,2526,2291,2054,1817,1582,1354,1135,929,738,564, 410,279,171,89,33,4,3,29,83,163,269,399,550,723,912,1118,1336,1563,1797,2034 }; const uint16_t noteG[]={ 51,2299,2547,2787,3016,3230,3426,3602,3754,3880,3978,4047,4086, 4094,4071,4017,3934,3822,3683,3519,3333,3127,2905,2670,2426,2176, 1924,1674,1430,1194,972,766,580,416,276,163,79,25,1,8,47,115,213, 338,490,665,861,1075,1303,1543,1791,2042 }; const uint16_t noteGd[]={ 48,2314,2576,2829,3068,3290,3492,3668,3817,3936,4023,4076, 4095,4079,4028,3944,3828,3681,3506,3307,3086,2848,2596, 2335,2069,1802,1540,1286,1045,821,618,440,288,167,78,22, 0,14,61,143,257,401,574,771,991,1228,1479,1739,2005 }; const uint16_t noteA[]={ 45,2330,2606,2872,3123,3353,3558,3734,3878,3987,4059,4092, 4087,4043,3961,3842,3689,3504,3292,3056,2801,2532,2253, 1970,1689,1415,1153,907,684,486,319,184,85,23,0,16,71, 163,292,454,646,865,1107,1366,1639,1919 }; const uint16_t noteAd[]={ 42,2346,2639,2918,3179,3416,3624,3798,3934,4030,4083,4093, 4059,3982,3864,3707,3514,3290,3039,2767,2480,2183,1883, 1587,1301,1031,782,561,371,218,103,30,1,15,72,172,313, 490,700,940,1203,1484,1777 }; const uint16_t noteH[]={ 40,2364,2673,2967,3238,3481,3690,3859,3985,4064,4095,4076, 4009,3894,3736,3536,3301,3036,2747,2441,2126,1809,1498,1199, 922,671,453,274,137,46,3,10,65,168,316,506,732,991,1274,1577,1890 }; const uint16_t noteP[]={ // 1,2048 };
, ( 1, 2, 4, 8 ..):
uint16_t mnote(const uint16_t *pa,char octave) // { int ii=0; do {ii=i;} while (ii!=i); ii=(octave*ii)%pa[0]; ii=*(pa+ii); return ii; }
i 100 :
/* 6 */ void TIM6_DAC_IRQHandler(void) { i++; TIM6->SR &= ~TIM_SR_UIF; // UIF }
, . , Nokia:
uint16_t *melody[]={ noteE,noteP,noteG,noteP, noteA,noteA,noteP,noteE, noteP,noteG,noteP,noteAd, noteA,noteA,noteP,noteP, noteE,noteP,noteG,noteP, noteA,noteA,noteP,noteG, noteP,noteE,noteP,noteP, noteP,noteP,noteP,noteP };
, ?..
(), , :
コード
uint16_t *melody2[]={ noteH,noteP,noteD,noteP, noteE,noteE,noteP,noteH, noteP,noteD,noteP,noteF, noteE,noteE,noteP,noteP, noteH,noteP,noteD,noteP, noteE,noteE,noteP,noteD, noteP,noteH,noteP,noteP, noteP,noteP,noteP,noteP }; uint16_t *melody3[]={ noteGd,noteP,noteH,noteP, noteCd,noteCd,noteP,noteGd, noteP,noteH,noteP,noteD, noteCd,noteCd,noteP,noteP, noteGd,noteP,noteH,noteP, noteCd,noteCd,noteP,noteH, noteP,noteGd,noteP,noteP, noteP,noteP,noteP,noteP };
( ). しかし! 0 4095, . , , . 100 …
.
#include "stm32f10x.h" #include "stm32f10x_rcc.h" #include "stm32f10x_gpio.h" int i=0; uint16_t current=0; int loccurrent=0; uint16_t mnote(const uint16_t *pa,char octave) // { int ii=0; do {ii=i;} while (ii!=i); ii=(octave*ii)%pa[0]; ii=*(pa+ii); return ii; } // 100 , 0 4095 // const uint16_t noteC[]={ 76,2216,2383,2547,2709,2865,3017,3162,3299,3428,3547,3657,3755,3842,3917,3979,4028,4064,4086,4095,4090,4070,4038,3991,3932,3860,3775,3679,3572,3455,3328,3193,3050,2900,2744,2584,2419,2253,2085,1917,1749,1584,1422,1264,1111,965,826,695,574,462,361,271,194,129,76,38,12,1,3,19,49,92,149,218,300,393,498,613,738,871,1013,1161,1316,1475,1639,1805,1973 }; // const uint16_t noteCd[]={ 72,2226,2402,2576,2746,2911,3069,3220,3361,3493,3614,3722,3818,3901,3970,4024,4063,4087,4095,4088,4065,4027,3974,3907,3825,3730,3622,3503,3372,3231,3081,2924,2759,2590,2416,2239,2061,1883,1706,1532,1362,1196,1038,887,744,612,490,381,284,200,130,75,35,10,0,6,27,64,116,182,263,357,464,583,713,853,1002,1159,1323,1492,1666,1842,2020 }; const uint16_t noteD[]={ 68,2236,2423,2607,2786,2959,3124,3280,3425,3559,3680,3787,3879,3955,4016,4059,4086,4095,4087,4061,4018,3959,3883,3792,3686,3566,3432,3288,3132,2968,2795,2617,2433,2246,2057,1869,1682,1498,1318,1145,980,823,677,543,421,314,221,143,82,38,10,0,7,32,74,133,207,298,403,523,655,799,954,1118,1291,1469,1652,1839,2028 }; const uint16_t noteDd[]={ 63,2247,2445,2639,2828,3009,3181,3342,3490,3625,3745,3849,3935,4003,4053,4084,4095,4087,4059,4012,3946,3862,3761,3643,3510,3363,3204,3034,2854,2666,2473,2275,2076,1876,1678,1483,1293,1111,938,775,625,488,366,260,171,100,48,14,0,6,31,76,139,220,319,434,565,710,868,1037,1215,1402,1594,1792,1991 }; // const uint16_t noteE[]={ 60,2259,2469,2673,2872,3061,3239,3405,3556,3691,3809,3907,3986,4044,4080,4095,4087,4058,4008,3936,3844,3733,3604,3458,3297,3122,2937,2741,2538,2330,2119,1907,1697,1490,1289,1097,914,744,588,447,324,219,133,69,25,3,3,24,68,133,218,323,446,586,742,912,1095,1287,1488,1694,1905 }; const uint16_t noteF[]={ 57,2272,2493,2709,2917,3115,3300,3470,3623,3756,3870,3961,4029,4074,4094,4089,4060,4007,3930,3831,3710,3569,3410,3234,3044,2842,2631,2413,2190,1965,1742,1522,1309,1104,911,731,567,421,295,189,106,47,11,0,14,51,113,199,306,434,582,748,929,1123,1329,1543,1763,1987 }; const uint16_t noteFd[]={ 54,2285,2519,2747,2966,3172,3362,3536,3689,3820,3927,4008,4063,4091,4092,4065,4010,3929,3823,3693,3540,3367,3177,2971,2753,2526,2291,2054,1817,1582,1354,1135,929,738,564,410,279,171,89,33,4,3,29,83,163,269,399,550,723,912,1118,1336,1563,1797,2034 }; const uint16_t noteG[]={ 51,2299,2547,2787,3016,3230,3426,3602,3754,3880,3978,4047,4086,4094,4071,4017,3934,3822,3683,3519,3333,3127,2905,2670,2426,2176,1924,1674,1430,1194,972,766,580,416,276,163,79,25,1,8,47,115,213,338,490,665,861,1075,1303,1543,1791,2042 }; const uint16_t noteGd[]={ 48,2314,2576,2829,3068,3290,3492,3668,3817,3936,4023,4076,4095,4079,4028,3944,3828,3681,3506,3307,3086,2848,2596,2335,2069,1802,1540,1286,1045,821,618,440,288,167,78,22,0,14,61,143,257,401,574,771,991,1228,1479,1739,2005 }; const uint16_t noteA[]={ 45,2330,2606,2872,3123,3353,3558,3734,3878,3987,4059,4092,4087,4043,3961,3842,3689,3504,3292,3056,2801,2532,2253,1970,1689,1415,1153,907,684,486,319,184,85,23,0,16,71,163,292,454,646,865,1107,1366,1639,1919 }; const uint16_t noteAd[]={ 42,2346,2639,2918,3179,3416,3624,3798,3934,4030,4083,4093,4059,3982,3864,3707,3514,3290,3039,2767,2480,2183,1883,1587,1301,1031,782,561,371,218,103,30,1,15,72,172,313,490,700,940,1203,1484,1777 }; const uint16_t noteH[]={ 40,2364,2673,2967,3238,3481,3690,3859,3985,4064,4095,4076,4009,3894,3736,3536,3301,3036,2747,2441,2126,1809,1498,1199,922,671,453,274,137,46,3,10,65,168,316,506,732,991,1274,1577,1890 }; const uint16_t noteP[]={ 1,2048 }; //, uint16_t *melody[]={ noteE,noteP,noteG,noteP, noteA,noteA,noteP,noteE, noteP,noteG,noteP,noteAd, noteA,noteA,noteP,noteP, noteE,noteP,noteG,noteP, noteA,noteA,noteP,noteG, noteP,noteE,noteP,noteP, noteP,noteP,noteP,noteP }; // uint16_t *melody2[]={ noteH,noteP,noteD,noteP, noteE,noteE,noteP,noteH, noteP,noteD,noteP,noteF, noteE,noteE,noteP,noteP, noteH,noteP,noteD,noteP, noteE,noteE,noteP,noteD, noteP,noteH,noteP,noteP, noteP,noteP,noteP,noteP }; // uint16_t *melody3[]={ noteGd,noteP,noteH,noteP, noteCd,noteCd,noteP,noteGd, noteP,noteH,noteP,noteD, noteCd,noteCd,noteP,noteP, noteGd,noteP,noteH,noteP, noteCd,noteCd,noteP,noteH, noteP,noteGd,noteP,noteP, noteP,noteP,noteP,noteP }; int main(void) { GPIO_InitTypeDef PORT; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC , ENABLE); PORT.GPIO_Pin = (GPIO_Pin_9 | GPIO_Pin_8); PORT.GPIO_Mode = GPIO_Mode_Out_PP; PORT.GPIO_Speed = GPIO_Speed_2MHz; GPIO_Init(GPIOC, &PORT); /* */ RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); /* */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_DAC, ENABLE); /* 6 */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM6,ENABLE); /* */ GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; GPIO_Init(GPIOA, &GPIO_InitStructure); TIM6->PSC = 23; // 24000-1 1000 TIM6->ARR = 99; // PSC 23 ARR 99 100 TIM6->DIER |= TIM_DIER_UIE; // TIM6->CR1 |= TIM_CR1_CEN; // ! NVIC_EnableIRQ(TIM6_DAC_IRQn); // TIM6_DAC_IRQn /* DAC1 */ DAC->CR |= DAC_CR_EN1; /* */ while (1) { GPIOC->BRR=GPIO_BRR_BR8; GPIOC->BSRR=GPIO_BSRR_BS9; do { loccurrent=i; } while (i!=loccurrent); // , GPIOC->BRR=GPIO_BRR_BR9; GPIOC->BSRR=GPIO_BSRR_BS8; current=(loccurrent/(2000))%32; // , 0 31. DAC->DHR12R1=(mnote(melody[current],1)+mnote(melody2[current],1)+mnote(melody[current],2)+mnote(melody2[current],2)+mnote(melody[current],4)+mnote(melody3[current],2))/6; } } /* 6 */ void TIM6_DAC_IRQHandler(void) { i++; TIM6->SR &= ~TIM_SR_UIF; // UIF }
, - ? はい
13:
, , STM32VLDiscovery, . :
1. Youtube Aston Martin.
2. ( ) .
3. ( Audacity ).
4. . 24 . , 2 , 2-3 -. .
5. WAV-.
6. ( WAV 2 TEXT) — -, . , .
7. 0 4095 Excel. 60 000 Notepad++ Sublime Text, . Excel 30 , — CoIDE …
8. .
, over 9000 . :
, , , , , :
そのようなもの。