ヘキサポッドを構築するというアイデアを思いついた方法についての話を省略しました(これらはYouTubeの膨大な動画でした)。すぐに部品を選択するプロセスに進みます。 2012年1月でした。 私は自分のロボットに何が欲しいか、何がそうでないかをすぐに知っていました。 私がしたかったのは:
-各脚には3つの自由度が必要です-3dof(3次元の自由度)。 単純なオプション2dof-はそのような昆虫の感覚を与えず、4dof-は不要であるため、3dofなので、3D空間で脚の先端を自由に動かすことができます。
-6脚; 繰り返しますが、これは4(ロボットは不器用にジャンプします)ではなく、クモのように8でもありません。
-小;
-安い;
-最小限のボードと接続。
投稿は大きいです。
もちろん、最初はパン粉用のマザーボードを選択することでした。 その時までにArduinoについて多くの良い点と悪い点を読むことができました。 しかし、主な選択肢として見たのは彼でした。 コントローラーを自分ではんだ付けする時間はありませんでした。たとえば、ARM CPUを搭載したより高度なボードを使用するのは高価であり、それらのプログラミング方法、PWM出力の操作方法などを理解していました。 そして、arduina:IDEが起動し、コードがヒットし、アップロードがクリックされました-こんにちは、すでに点滅しています。 美人! ;)
最初、私は次のように、arduino megaとclonesを見始めました。 サーボを操縦するために使用できるPWM出力の数は多かった。 3dofヘキサポッドには3 * 6 = 18のサーボと、それらを制御するための個別のチャンネルが必要であることを思い出させてください。 しかし、それから私はarduinoメガの中で本物のジャズを見つけました。これはRed Back Spider Controllerと呼ばれるDaguボードです。 ここで彼女はebayにいます。
彼女はすべての出力を既製の3ピン(グランド、電源、信号)、および電源相互接続の形式で提供します。 コントローラー自体の電源は安定していますが、dviglovコネクターにそのまま送られます(UPD:そのままではなく、5ボルトも安定します。また、18のサーボはコントローラーの動作に干渉しないため、明らかにコントローラーの電源から分離されています)。 これにより、電源端子に7〜30ボルトの十分な電力を印加するだけで(eee pc 901から12Vおよび3Aへの電源供給は、18個すべてのサーボで十分にうなります)、ロジックとdviglovの個別の電源供給で頭を欺くことはありません。 また、これにより、将来、このすべてのモンスターを7.4ボルトのLi-Poバッテリーのパックに簡単に植えることができるようになります。 そして、ソフトウェアの観点から見ると、これは通常のArduinoメガであり、ソフトウェアとライブラリ、および鉄と互換性があります(元のメガに直接インストールされたシールドを除く-転がりません)。 確かに、価格は元のメガよりもさらに高くなっていますが、他のすべての利点がこれを上回っています。
さらなるサーボ。 eBayには、マイクロサーボ用のさまざまなものがあります。 私は、最も小さくて安い、重量が9グラムのプラスチック製ギアボックスの中で最も強力なものを取りました。 バッチで送られる場所をたくさん取ると、安くなります。 6パックを3パック取ったようです。 将来を見据えて、私はこれ以上費用をかけず、金属ギアとボールベアリングでサーボを使用しなかったことを後悔しています。 これらのプラスチック製のものには、かなり顕著なバックラッシュがあり、ギアが滑るときに過度の力を伴う特徴的なクランチがありました。 バックラッシがあるため、キネマティックスを確実に微調整するのはかなり困難です(そう、それが最も難しいことが判明しました)。
実際に私が注文したのはそれだけで、配送料は約100ドルでした。 制御および無線制御用のバッテリーおよびトランスミッター/レシーバー-後日提供。 ラジコンのマシンを持っているので面白くありませんが、本当に興味を持ったのは脚でした! YouTubeでスムーズに動作するヘキサポッドのビデオは魅惑的で 、私はそれを見て、レビューし、涙が頬を転がすたびに、「I want!」とうめきました。 このような完成品を注文したくないのですが、自分で何かをしたいです!
私は注文を待っている間に、啓発された人々が彼らの創造物をいかに復活させるかを読みました。 もちろん、 逆運動学 ( 翻訳 )はすぐに表面化しました。 関節のある「四肢」について簡単かつ即座に言うと、直接運動学はヒンジ角が入力に適用され、出力に空間の肢のモデルと肢の極点の座標があるときです。 逆運動学-明らかに逆に動作します-手足の極点の座標は、到達する必要がある入口に到着し、出力では、これを行うためにヒンジを回す必要がある角度を取得します。 サーボドライブは、入力する必要がある角度位置を取得します(1本の信号線、エンコードされたPWM / PWM )。
私は書き始めました。 私が読んだことから始めました: そこに記述されている方法に従ってIRの実装を考えること 。 しかし、私の場合、それは過度に複雑であるという感覚がすぐに伝わりました。 さらに、実装が面倒であり、計算が非常に複雑であるため、計算は反復的です。 そして、私は6本のレッグを持っていますが、それぞれのレッグでIRをカウントする必要があり、16MHzのみが最も賢いAVRアーキテクチャではありません。 しかし、自由度はわずか3です。 そして、「到達範囲」内の任意のポイントに到達できるのは一方向に限られると推測するのは簡単です。 決定はすでに頭の中で熟しています。
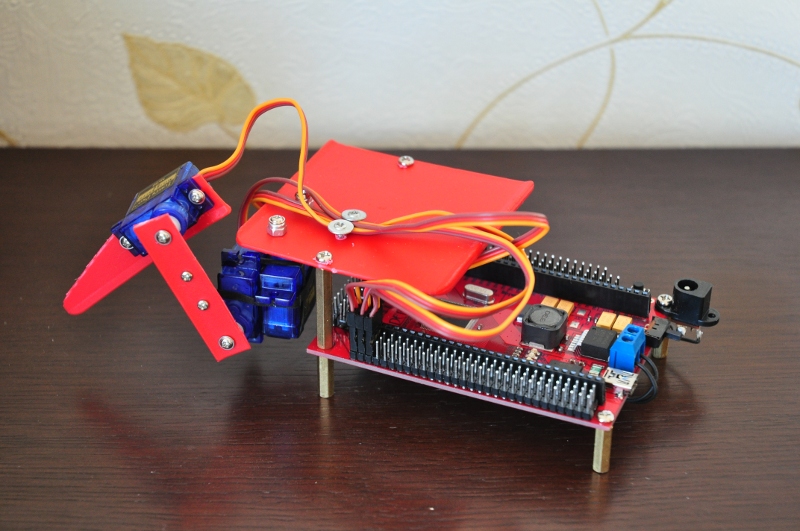
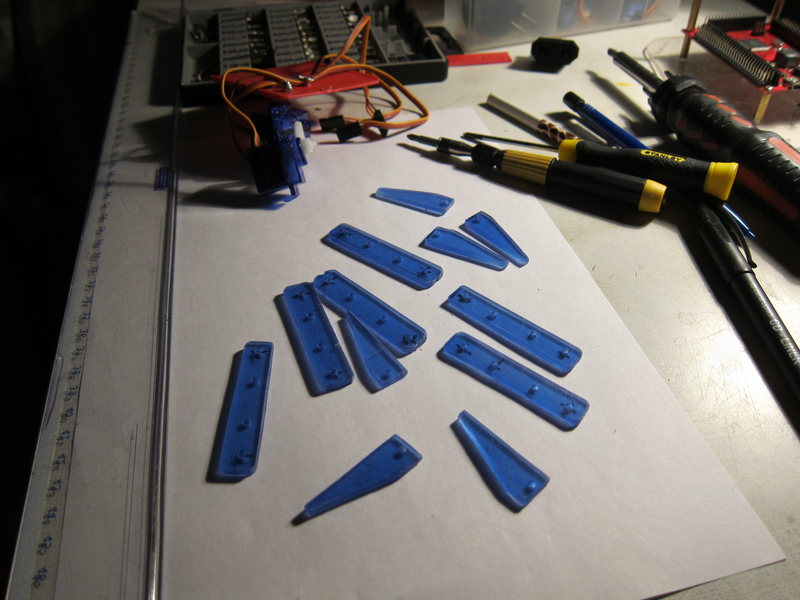
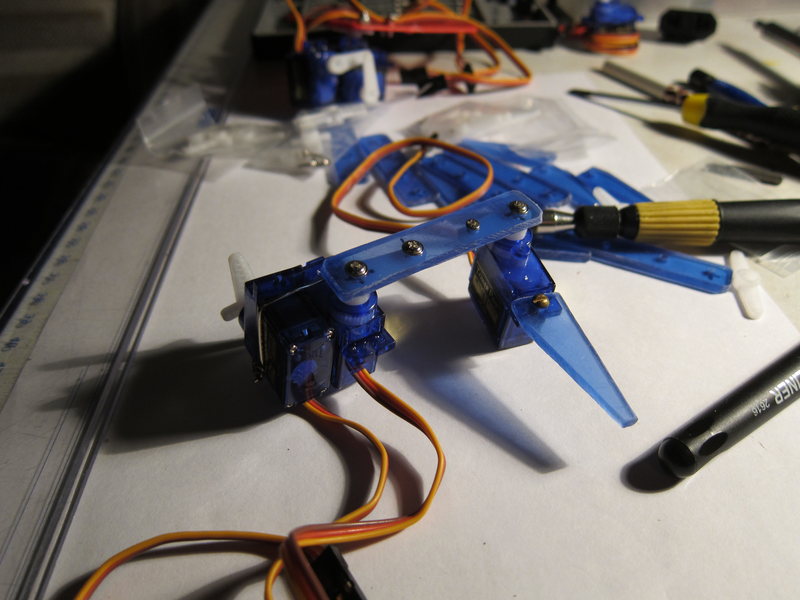
しかし、それから2月に小包が来ました。1つは中国から、もう1つは英国からです。 もちろん、まず最初に、Arduinoボードをいじりました。LEDを点滅させ、そこに接続されたスピーカーに浸しました。 その後、彼は実際のIRを既にハードウェアに実装し始めました。 即興の素材(はさみ、ネジ、ノズルで切断しやすい柔らかいプラスチック-すべてのサーボセット)からプロトタイプの脚を構築しました。 ターミネーターのこの脚は、Arduinoボードに直接固定されました。 予算内でのジョイントの作成方法を検討できます。
私はこの問題を賞賛し、将来的にこのロボットに基づいて人類との戦争を宣言するターミネーターをはんだ付けすると、ジョン・コナーとシュワルツェネッガーが過去にここに戻り、彼らがこのプロトタイプを取り、Orodruinでそれを溶かすことを夢見ていた。 しかし、誰も戻らず、何もとらず、私は冷静に続けました。
IRはまったく恐れる必要はないことがわかりました。私の場合は、幾何学的な三角法に帰着しました。 関節にアクセスしやすくするために、ウィキペディアに目を向けて昆虫について読みました。 これらには、リム要素の特別な名前があります。
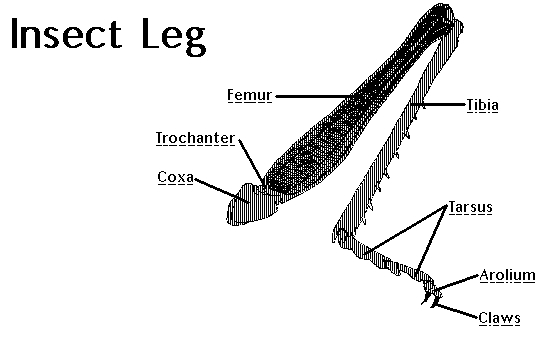
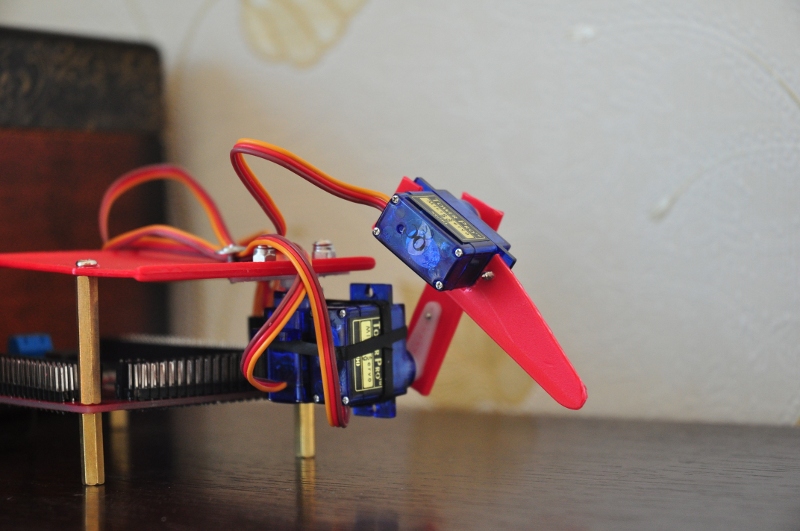
ロシア語にもこのための独自の非常に興味深い名前がありますが、コード内にある「盆地」、「転子」、「ドラムスティック」などは、私を眠らせません。 したがって、Coxa、Femur、Tibiaの名前は3つの手足と対応するサーブに任せました。 上記のプロトタイプの脚から、coxa用に別の部品さえ持っていないことは明らかです。 これらは、弾性バンドで固定された2つのセルバスです。 大腿骨-サーボのレバーが両側に取り付けられているプラスチックのストリップを実装しました。 したがって、最後に残っているサーボモーターは脛骨の始まりであり、延長するために別のプラスチック片がボルトで固定されます。
私はためらうことなくエディターを開始し、ファイルLeg.hを作成し、その中にLegクラスを作成しました。 さて、補助的な濁りの束。)到達する必要がある空間A(ax、ay、az)に点Aがあるとします。 次に、トップビューは次のようになります。
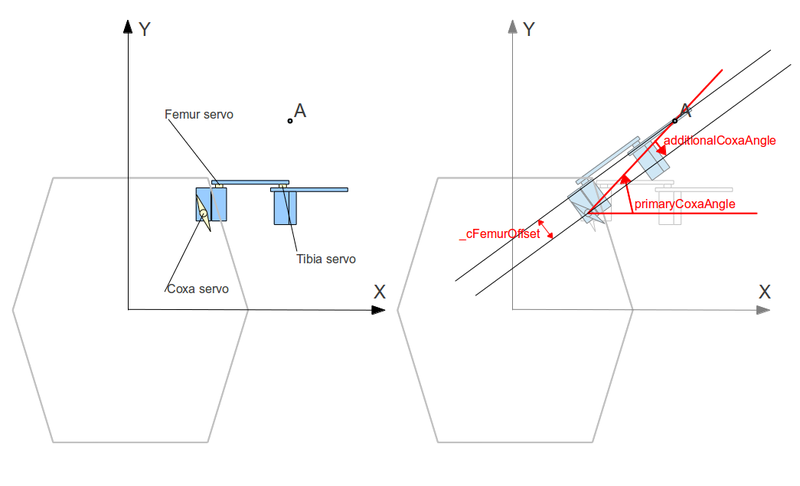
図では、すぐに最初の角度を計算する方法を示しました。これは、Coxaを制御するサーボの回転角で、水平面内で手足全体を回転させます。 図では、コードで使用されている変数(すべてではない)がすぐに赤で示されています。 あまり数学的ではありませんが、便利です。 私たちにとって関心のある角度は基本的なものであることがわかります。 まず、primaryCoxaAngle-はX軸に対する角度(0; A)にすぎません(これは極座標のポイントAの角度に相当します)。 しかし、図は、脚自体がこの角度で配置されていないことを示しています。 理由は、coxaの回転軸が「脚線」上にないためです-私はそれを正しく言う方法がわかりません。 ここでは、他の2つのジョイントが回転し、脚の先端が位置する平面にはありません。 これは、追加のCoxaAngleを数えることで簡単に補うことができます(それを数える方法-私はやめようとはしませんが、彼らはまだ学校にいましたよね?)。
合計で、最初のコードがあります。これらは、リーチ(Point&dest)メソッドの内部です。
float hDist = sqrt( sqr(dest.x - _cStart.x) + sqr(dest.y - _cStart.y) ); float additionalCoxaAngle = hDist == 0.0 ? DONT_MOVE : asin( _cFemurOffset / hDist ); float primaryCoxaAngle = polarAngle(dest.x - _cStart.x, dest.y - _cStart.y, _thirdQuarterFix); float cAngle = hDist == 0.0 ? DONT_MOVE : primaryCoxaAngle - additionalCoxaAngle - _cStartAngle;
ここで、destは移動したいポイント、_cStartはcoxaのアタッチメントポイント(および回転の中心)の座標です。hDistでは、水平面内の_cStartからdestまでの距離を考慮します。 DONT_MOVEは単なるフラグであり、coxaをどこでも回転させる必要はなく、現在の位置に残します(dest-coxaの回転軸のどこか-めったにありませんが、発生するため)。 ここで、cAngleはすでにサーボが初期角度(動作範囲の中央にある)から逸脱する必要がある角度です。 _cStartAngleも使用されていることがわかります。これは、インストール中にデボルトによってサーボが回転する空間内の角度です。 忘れない場合は、_thirdQuarterFixについて後で説明します。
その後、すべてがさらにシンプルになります。 上記の「脚線」平面を見るだけです。
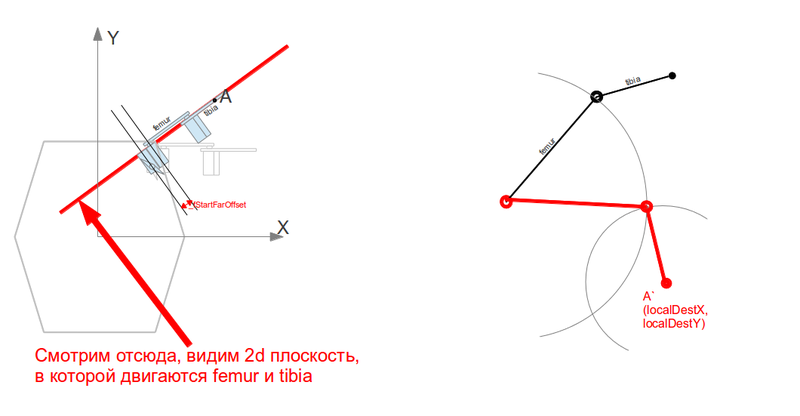
同時に、問題は突然2つの円の交点を見つけることになります。 1つは私たちの大腿骨が「成長」するポイントにあり、2つ目は到達する必要があるポイントです(すでにローカルの2d座標で)。 円の半径は、それぞれ大腿骨と脛骨の長さです。 円が交差する場合、2つのポイントのいずれかでジョイントを配置できます。 モンスターの「膝」が下ではなく上に湾曲するように、常に上の方を選択します。 それらが交差しない場合、ターゲットポイントに到達しません。 もう少しコードがあります。飛行機への移行は基本的なものであり、まだいくつかの落とし穴が考慮されてコメントに文書化されているため、後でコードを解析して頭を悩ませることはありません。 簡単にするために、このローカル座標「脚面」で、大腿骨が原点から成長する点を選択しました。
// Moving to local Coxa-Femur-target coordinate system // Note the case when hDist <= _cFemurOffset. This is for the blind zone. // We never can't reach the point that is nearer to the _cStart then // femur offset (_fStartFarOffset) float localDestX = hDist <= _cFemurOffset ? - _fStartFarOffset : sqrt(sqr(hDist) - sqr(_cFemurOffset)) - _fStartFarOffset; float localDestY = dest.z - _fStartZOffset; // Check reachability float localDistSqr = sqr(localDestX) + sqr(localDestY); if (localDistSqr > sqr(_fLength + _tLenght)) { log("Can't reach!"); return false; }
ここで、localDestXとlocalDestYはターゲットポイントの座標です。 残っているのは、中心が(0,0)と(localDestX、localDestY)の円と、半径_fLengthと_tLength(それぞれ、大腿骨の長さと脛骨の長さ)の交点を見つけることです。 小学生もこれに対処しますが、ここで私はかなりの間違いを犯しました。したがって、自分自身をテストし、誰でもどんな種類の愚かな式が誰であるかを確認できるように、この基本的な幾何学的問題が明確に明確に開発されたソースへのリンクを残しました:
// Find joint as circle intersect ( equations from http://e-maxx.ru/algo/circles_intersection & http://e-maxx.ru/algo/circle_line_intersection ) float A = -2 * localDestX; float B = -2 * localDestY; float C = sqr(localDestX) + sqr(localDestY) + sqr(_fLength) - sqr(_tLenght); float X0 = -A * C / (sqr(A) + sqr(B)); float Y0 = -B * C / (sqr(A) + sqr(B)); float D = sqrt( sqr(_fLength) - (sqr(C) / (sqr(A) + sqr(B))) ); float mult = sqrt ( sqr(D) / (sqr(A) + sqr(B))); float ax, ay, bx, by; ax = X0 + B * mult; bx = X0 - B * mult; ay = Y0 - A * mult; by = Y0 + A * mult; // Select solution on top as joint float jointLocalX = (ax > bx) ? ax : bx; float jointLocalY = (ax > bx) ? ay : by;
それだけです。少し残っています。取得した座標から、大腿骨と脛骨のサーボの実際の角度を計算します。
float primaryFemurAngle = polarAngle(jointLocalX, jointLocalY, false); float fAngle = primaryFemurAngle - _fStartAngle; float primaryTibiaAngle = polarAngle(localDestX - jointLocalX, localDestY - jointLocalY, false); float tAngle = (primaryTibiaAngle - fAngle) - _tStartAngle;
再び基本-角度座標とすべて。 たとえば、_fStartAngleは大腿骨開始角度、つまり大腿骨がデフォルトになる角度です。 そして、リーチ()メソッドの最後の行(彼は行こうと言って、手を振った):
move(cAngle, fAngle, tAngle);
moveメソッドはすでにコマンドをサーバーに直接提供しています。 実際、その中には、悪い角度(サーボは回転できませんが、試行します)から保護するためにあらゆる種類のものを追加する必要がありました。また、他の方向に鮮やかに配置および/または向けられた他の脚のために。 しかし、今のところ、私たちは1つの足だけで作業しています。
これらの部分はすでに最終的なコードであり、完全とはほど遠いものであり、確実に大幅に改善することができます。 しかし、それは機能します! 幾何学三角法のコースを超えたことがないため、3dof脚の完全に機能的な逆運動学を実装しました! はい、1回の反復ですぐにソリューションを取得できます。 これが機能するためには、足を慎重に測定し、データでクラスを構成する必要がありました。 最終製品で測定するのが最も難しい角度を含みます。 おそらく、auto-cadで設計して美しいレンダリングを作成すると、角度を測定する方が簡単になりますが、この哀れみに対処する時間も欲求もありませんでした。
2月が始まったばかりで、ビデオ映像はすでに準備ができていました。 IRを確認するために、私は足に空間内のあらゆる種類の図形を記述するように強制しました(このため、連続してリーチを呼び出す必要があり、長方形または円上の点をバイパスし、コードは退屈で退屈なので、私はそれを持ちません(そして、旋回プリミティブで実験を終えた後、私はそれをまったく見ました) ):
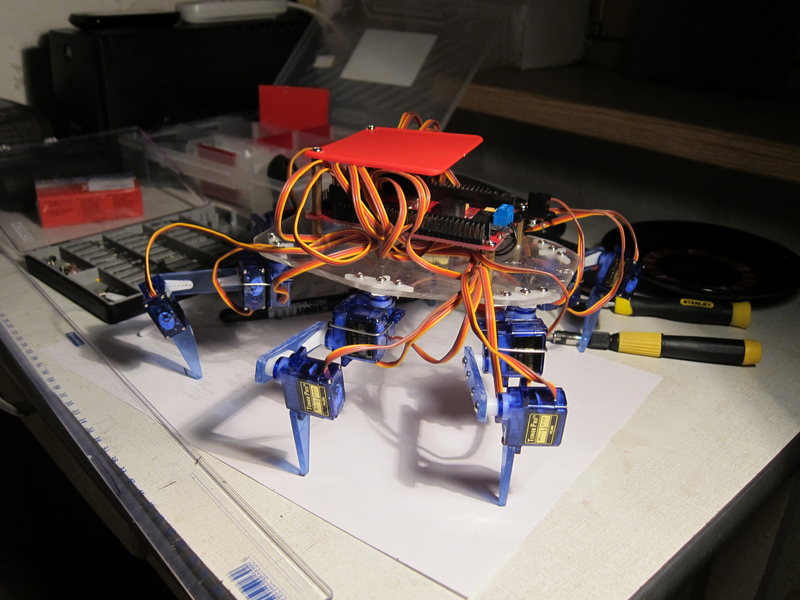
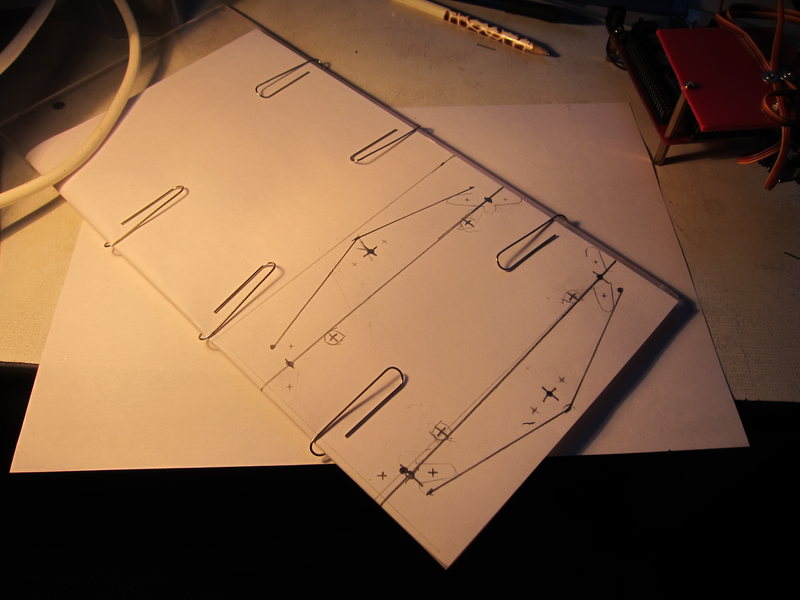
次に、このクラフトでのプレイを完了する必要がありましたが、片足でジャンプすることはできませんでした(そのようなロボットは本当に面白いでしょう)。 しかし、六脚が必要です。 プレキシガラスを探すために最寄りのフリーマーケットに行きました。 私は2つの優れた部品を見つけました-1つは3 mmの厚さ(胴体のためだけであると思った)、もう1つは2 mmと青(サーボに合った優れた手足)。 数週間後、私はこれから何かを作るために夕方を切り取りました。 彼は紙にスケッチを作りました。 試着-すべては大丈夫のようで、それは弓のこ次第です。
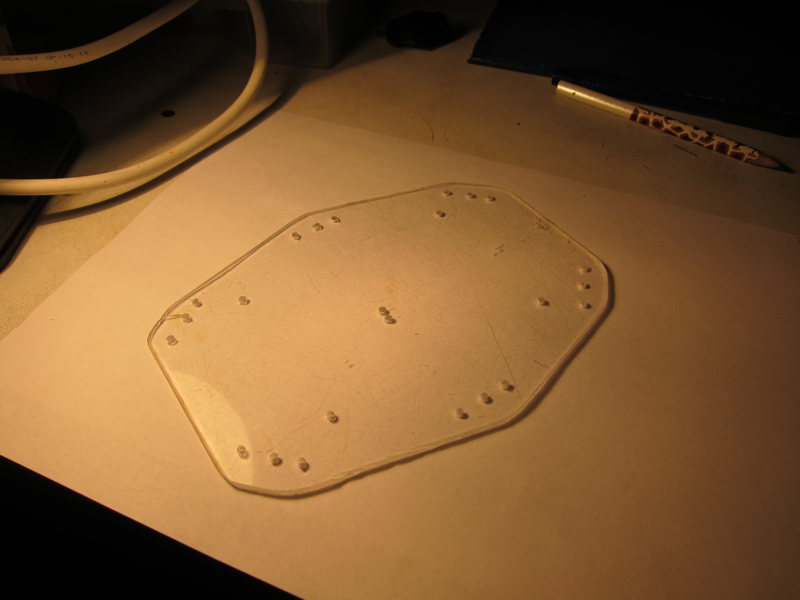




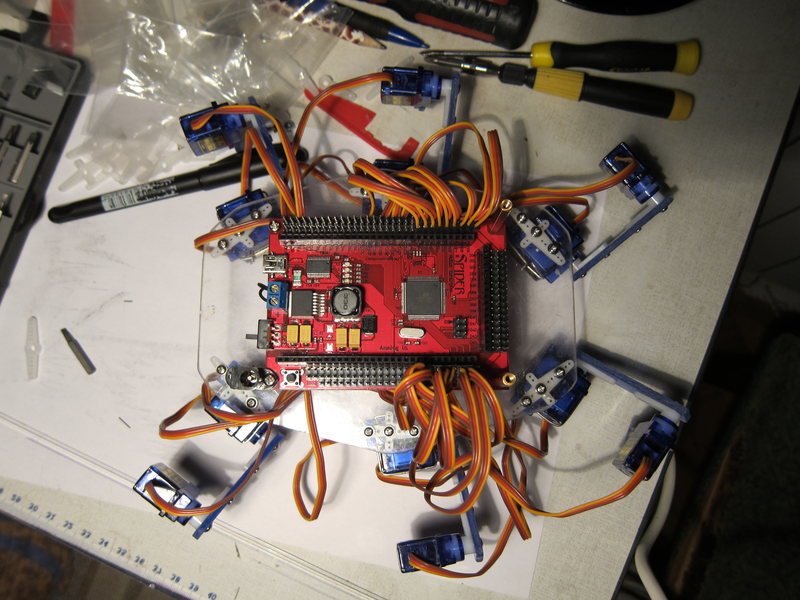

そして、ここは海外の怪物、6本足です。 1本の脚をテストしたとき、このビジネスに外部ネジからのある種の左フィーダーを供給しました。 十分。 しかし、彼から6本の足を食べることはすでに怖かったです。 そのため、私はまだ適切な保育園を手に入れる必要があると考えながら、しばらく手を掛けました。 しかし、それははるかに簡単であることが判明しました、私はすでに上記で言及しました-eee pc 901からのフィーダーが登場しました。
6本の脚の作業のデバッグは、1本の脚のエンジンを作成するよりもさらに困難でした。 脚の半分は、他の脚に比べて鏡映されていました。 さらに、すべてが異なる方向に向けられています。 一般に、私は非常に長い間すべてを設定および設定しましたが、これは私を本当に刺激しませんでした、なぜなら 便利なデバッグツールはありませんでした。私が頼りにしていた最大のものは、シリアルでのログ出力でした。 そして、その1つはメインの* .inoファイルと接続されたLeg.hから正常に機能しました-目的のオブジェクトはもう見られませんでした。 彼は丸太のために松葉杖をひねりました(facepalm)。 時間が経つにつれて、リファクタリング。 そして春が来て、自転車シーズンは全力で開かれ、私は6本足のペットをクローゼットの中に投げ入れました。 それで、それはすべての夏と秋の暖かい部分に行きました。
しかし、雨が降り始め、寒くなり、六脚が引き抜かれました。 polarAngle計算関数の非常に_thirdQuarterFixを含む彼の脚がデバッグされました。 問題は、2本の脚(左中部と左後部)が動き、ほとんどの場合第3四半期にあったことです。
そして、私は素朴なpolarAngleを持っていました-X軸に対して-piからpiまでの角度を返しました。また、これらの2本の脚の1つを第2四半期に変える必要がある場合、polarAngle値は-piからpiにジャンプし、実際にそれ以上の計算に悪影響を及ぼしました。 松葉杖で修正-これらの2本の脚の場合、polarAngleは「異なる」と見なされます。 私は自分のコードを恥ずかしく思っていますが、プロジェクト全体は概念実証であり、その唯一の目的は、現実的な動くヘキサポッドを組み立てられるかどうかを理解することだけです。 したがって、コードは今すぐ動作するはずです。 そして、リファクタリング-リファクタリング。
第3四半期を処理した後、彼はペダルパターンのペダルを踏み始めました。 これを行うために、Legクラスにデフォルトポイントを導入しました。 ロボットが注意とレベルにあるときの足です。 この点は調整できます。主なことは、すべての脚が同じz座標上にあることです(したがって、脚は実際には同じ平面上にあり、Legはさらに低いレベルのtuneRestAngles())。 また、同じZ座標内で、ほぼ任意に移動できます。 ほとんど-動きの範囲は無限ではないため、ステップでこの範囲を超えないようにするために-デフォルトでは、この範囲の中心近くに足の位置を配置しようとしました。
ここではコードをテキストに入れず、あまりにも初歩的であり、最終的にあらゆる種類のフルバージョンへのリンクを提供します-同時にgithubの使用方法を学びます。
ステップシーケンスは、単純なものを選択しました-地上3フィート、空中に再配置された3フィート。 したがって、デフォルトの位置に対する脚の座標は、2つのグループに分けることができます。 これら2つのグループについて、ループ内でステップを実行しました(Buggy.inoのwalk()関数を参照)。 しかし、最終的に、各レッグはデフォルトの座標に基づいて独自の個別の座標を計算しました。
そして彼は行った! しかし、これまでのところ、前方のみです。 彼はリノリウムをあまり滑らないように、足に輪ゴムをつけました。 彼は急いで撮影し、友達に見せました。
もちろん、ポッドまで。 しかし、私はまだ終わっていません。)私は夜にうんざりしていました-そして、どんな方向にも動く能力を追加しました(しかし、ケースを回さずに。))。 さらに、動きの間をスムーズにするために、彼は足をゆっくりと動かす機能(smoothTo())を追加しました(2つのグループで再び上昇し、一方のグループは常に下に、もう一方のグループは立ち上がり、もう一方は上昇して移動します)。 これは、クリーチャーが足で急激に動いて動きの方向を変えないようにするために必要です(この機能は、過去数年の多くのゲームキャラクターにとっては非常に不足しています)。 そして、彼はあらゆる方向に活発に走りました-横に、斜めに:
両方のグランドソートファイルをここで表示できます 。 このテキストを書いている時点で、特定のリビジョンへのリンクを提供します。 将来的には、すべてが完全に異なるものになる可能性があります。
これまでに区別できる結果:
-ヘキサポッド自体をリベットで留めることは実行可能な仕事です。
-キネマティクスをゼロから自分で記述します-誰でも(開発者)にも可能です。
-予算は最小限に抑えることができます。本当にお金をかける必要があるのはサーボだけです。 そして、はんだごてがあれば、どんなマイクロコントローラーでもできます。 ただし、便利であればあるほど高価になります。
-サーバーに保存しない方が良いですが、最も安価なものでも機能します。
-私はコンピューターマグでzxスペクトルを初めて見て、そのための最初のプログラムの書き方を学んだ9歳の頃から、プログラミングのような喜びを経験していません。 コードがどこかで機能するだけでなく、誰かに何かを見せてくれるだけでなく、目の前で走って猫を怖がらせるのはとてもクールです。
前方はもちろん、身体のスムーズな動きのためのより高度なアルゴリズムであり、無線制御とバッテリーはもちろんです。