2012年8月6日、好奇心装置が火星の表面に着陸しました。 ローバーは、今後23か月にわたって、惑星の表面、鉱物組成、放射スペクトルを調査し、生命の痕跡を探し、人が着陸する可能性を評価します。
主な研究戦術は、高解像度カメラで興味深い岩を検索することです。 そのようなものが現れたら、遠くからローバーがレーザーを研究中の岩に照射します。 スペクトル分析の結果により、顕微鏡とX線分光計を備えたマニピュレーターを取り出す必要があるかどうかが決まります。 さらに、Curiosityは、サンプルを抽出して、さらに分析するために内部研究所の74個のカップの1つにロードできます。
すべての優れたボディキットと外部の明るさのために、このデバイスは車の質量(900 kg)を持ち、火星の表面の重量は340 kgです。 すべての機器に電力を供給するため、ボーイング社の放射性同位元素熱電発電機からのプルトニウム238の崩壊エネルギーが使用されます。 現時点では、2.5 kWhの熱エネルギーと125ワットの電気エネルギーを生成し、時間の経過とともに、電気出力は100ワットに減少します。
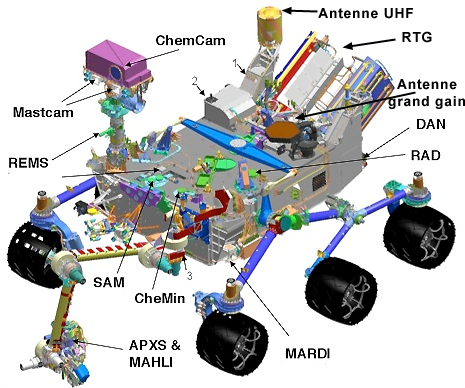
ローバーにいくつかの異なるタイプのカメラを設置しました 。 マストカメラは、通常のカラーレンディションの2つの異なるカメラのシステムであり、1600×1200ピクセルの解像度で写真(立体視を含む)を撮影でき、ローバー向けの新しいハードウェア圧縮720pビデオストリーム(1280×720)を記録します。 結果の素材を保存するために、システムには各カメラに8ギガバイトのフラッシュメモリがあります。これは数千枚の写真と数時間のビデオ録画に十分です。 写真やビデオの処理は、制御電子機器「Curiosity」に負荷をかけることなく行われます。 メーカーにはズーム構成があるという事実にもかかわらず、テストの時間がないため、カメラにはズームがありません。
MastCamの画像のイラスト。 火星の表面のカラフルなパノラマは、いくつかの画像を貼り合わせることによって取得されます。 MastCamカメラは、赤い惑星の天気で大衆を楽しませるためだけでなく、マニピュレーターによる移動や移動の際のサンプル抽出の補助としても使用されます。
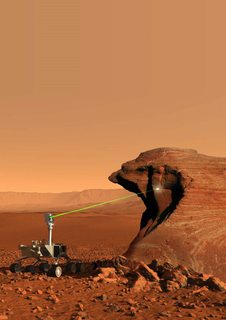 ChemCamシステムの一部もマストに取り付けられています。 これは、レーザースパーク発光分光器とペアで動作するイメージングユニットです.5ナノ秒のレーザーパルスで少量の試験岩石を蒸発させた後、得られたプラズマ放射のスペクトルを分析し、サンプルの元素組成を決定します。 マニピュレータを拡張する必要はありません。
ChemCamシステムの一部もマストに取り付けられています。 これは、レーザースパーク発光分光器とペアで動作するイメージングユニットです.5ナノ秒のレーザーパルスで少量の試験岩石を蒸発させた後、得られたプラズマ放射のスペクトルを分析し、サンプルの元素組成を決定します。 マニピュレータを拡張する必要はありません。
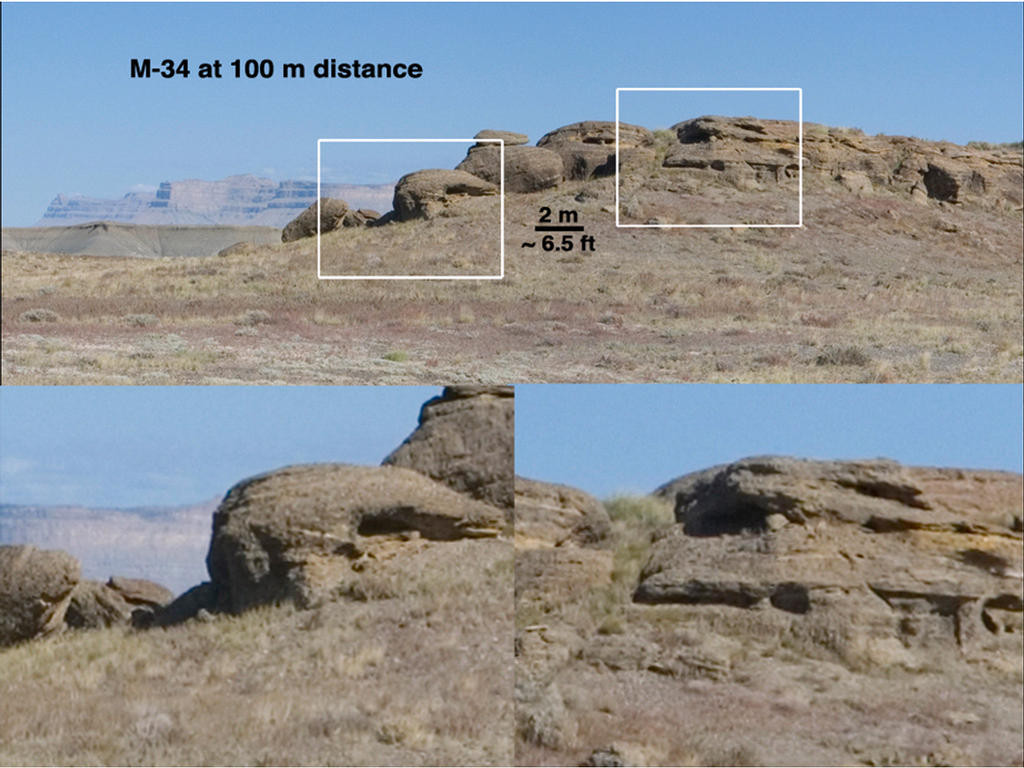
機器の解像度は、以前の火星探査機に搭載されていた解像度の5〜10倍です。 7メートルから、ChemCamは研究対象の岩石の種類(火山や堆積岩など)、土壌と石の構造、主要な元素の追跡、結晶構造内の水分子を含む氷と鉱物の認識、石の侵食の痕跡の測定、マニピュレーターによる岩石の研究の視覚的支援を行うことができます。

ChemCamの費用は1,000万ドル(遠征の総費用の半分未満)。 このシステムは、マスト上のレーザーとハウジング内の3つの分光器で構成されており、放射線は光ファイバーを介して供給されます。
火星のハンドレンズイメージャーはローバーマニピュレーターにインストールされ、1600×1200ピクセルのサイズの画像を撮影でき、12.5マイクロメートルの詳細を見ることができます。 カメラには、昼夜を問わず動作する白色のバックライトが付いています。 炭酸塩と蒸発岩の鉱物の放出を引き起こすには紫外線照射が必要であり、その存在は水が火星の表面の形成に関与したことを示唆しています。
 マッピングのために、Mars Descent Imager(MARDI)カメラを使用しました。これは、デバイスの降下中に、8ギガバイトのフラッシュメモリあたり1600×1200ピクセルの画像を記録しました。 表面に数キロメートル離れるとすぐに、カメラは毎秒5枚のカラー写真を撮り始めました。 得られたデータは、好奇心の生息地をマッピングすることを可能にします。
マッピングのために、Mars Descent Imager(MARDI)カメラを使用しました。これは、デバイスの降下中に、8ギガバイトのフラッシュメモリあたり1600×1200ピクセルの画像を記録しました。 表面に数キロメートル離れるとすぐに、カメラは毎秒5枚のカラー写真を撮り始めました。 得られたデータは、好奇心の生息地をマッピングすることを可能にします。
 ローバーの側面には、視野角120度の白黒カメラが2組取り付けられています。 Hazcamsシステムは、操縦を行い、腕を伸ばすために使用されます。 マストにはNavcamsシステムがあります。これは、視野角が45度の2色カメラです。 火星探査機プログラムは、これらのカメラのデータに基づいて、常にくさび形の3Dマップを作成し、予期しない障害物との衝突を回避しています。 Curiosityの最初のショットの1つは、Hazcamカメラの写真です。
ローバーの側面には、視野角120度の白黒カメラが2組取り付けられています。 Hazcamsシステムは、操縦を行い、腕を伸ばすために使用されます。 マストにはNavcamsシステムがあります。これは、視野角が45度の2色カメラです。 火星探査機プログラムは、これらのカメラのデータに基づいて、常にくさび形の3Dマップを作成し、予期しない障害物との衝突を回避しています。 Curiosityの最初のショットの1つは、Hazcamカメラの写真です。
気象条件を測定するために、 ローバーに圧力、大気および表面温度、風速、紫外線を測定するローバー環境監視ステーションが設置されています。 REMSは火星の塵から保護されています。
CheMin( Chemistry and Mineralogy )は、蛍光X線装置とX線回折を使用して、化学組成および鉱物組成を研究するための装置です。 大まかに言えば、火星が豊富な鉱物を見つけるのに役立ちます。これは、惑星の状況を示しています。
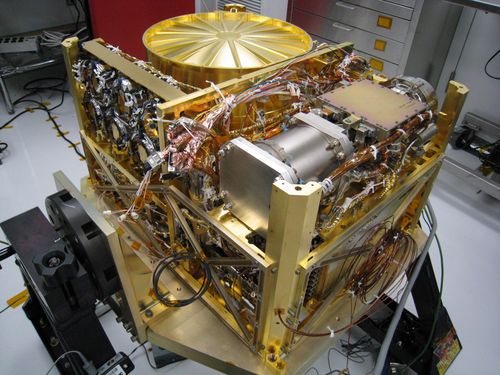
得られたサンプルを研究するための主なツールは、火星でのサンプル分析であり 、その質量はすべての科学機器の質量の半分です。 SAMには、質量分析計、ガスクロマトグラフ、カスタムレーザー分光計が含まれます。 仕事はまた、 アルファ粒子X線分光計を使用しています。 サンプルはアルファ粒子で照射され、その完全な元素組成は2〜3時間で得られ、10分で主成分を確認できます。
火星を訪れる人々の可能性を評価するために、ローバー内に放射線検出器と水素検出装置 が設置されてい ます 。 科学機器がアメリカだけでなく、フランス、カナダ、ロシア、その他いくつかの国の組織のプロジェクトで開発されたことは興味深いことです。
このすべての機器は、256 MBのRAM、フラッシュメモリの形式の2 GBのROM、および1秒間に4億回の操作を実行できるRAD750プロセッサを備えた小さな複製コンピューターによって制御されます。これは、おおまかに言えば、通常のスマートフォンに匹敵します。 システムの能力は、ステレオ画像から15〜4万の3Dポイントを生成するのに十分です。 好奇心の記憶は、前世代の火星探査車の記憶の約8倍の生産性があります。 システム構成は安価なシングルボードコンピューターのスタッフィングに似ていますが、電子機器の動作条件とRaspberry Piクローンには保護されていない電子機器によってテストされた放射線を考慮する必要があります。
使用されるオペレーティングシステムは VxWorksです。 これは、前の3つの火星探査機-Spirit、Opportunity、Mars Pathfinder、およびSpaceX Dragon shipを管理した独自のリアルタイムオペレーティングシステムです。 VxWorksは、宇宙船に加えて、旅客機、ロボット工学、医療機器、その他の信頼性の高い組み込みシステムでも使用されています(たとえば、Appleルーターはローバーと同じオペレーティングシステムを使用します)。
制御プログラムは150のモジュールに分割され、各モジュールが個別の機能を担当します。 接続されたモジュールは、それらに含まれるモジュールのコラボレーションを編成するコンポーネントに結合されます。 合計で、10個未満の高レベルコンポーネントがあります。 ほとんどのコードは自動的に生成されるか、以前のローバーから継承されます。
しかし、これらの250万行のCコードでは、多くのシステムの自律的な制御が、まれな人間の介入のみで実現されています。地球からの信号には数分かかります。 いくつかのカメラとセンサーの証言に基づいて、コンピューター自体がデバイスの駆動、撮影と撮影、冷却システム、サンプル抽出、科学機器の操作を制御します。
もちろん、コードは公開されておらず、ローバーのソフトウェアに関するデータはほとんどありません。 しかし、NASAに何を期待すべきかは誰が知っていますか?彼らはGithubに長い間アカウントを持っています 。