だから、会う-エクトグナス。

かなり長い間、私はロボットを組み立てることを計画していました。 より正確には、いくつかのオプションから選択しました-追跡ロボットと車輪付きロボットをすぐに追跡しました。 これは非常に簡単な決定であり、選択は主にクアドロコプターとヘキサポッドの間でした。
私は常にマイクロクアドロコプターに魅了されていましたが、バッテリーから非常に短い時間飛んだということでいつも私を動揺させました。 3つのマイクロサーボが横になっていることを思い出したら、そのような小さなロボットを1日で組み立てました。
もちろん、不器用で制御が不十分であることが判明しました。これは、全身全体の自由度が3度しかないためですが、何らかの理由でそれを管理し、ソフトウェアを作成するのが本当に楽しかったためです。
もっと大きなものを集めたいという思いを思い出して、私はついにヘリコプターの考えを捨てて、ヘキサポッドを作ることに決めました。 私はこれについて友人に書きました、そして、彼はプロジェクトに参加することに決めました。
開発開始
最初は、脚に2台のサーバーがあるロボットを組み立てることを計画しました。 これにより、価格が下がります(18サーボ対12サーボ!)そして消費電力。 この種の構造では、1つのサーボドライブが水平面内の脚の回転を制御し、2つ目はその持ち上げです。 3サーバーバージョンの場合のように、脚は2つの部分で構成されていますが、追加のサーボドライブではなく、フレームで接続されています。 したがって、極端な位置では、3サーバーバージョンとは対照的に、脚を「上げて身体に押し付ける」または「地面に下げて脇に置く」ことができます。
まず、脚のデザインを見積もる必要があったため、Google SketchUp 3Dを使用することにしました。 この時点で、コンピューターにマシンビルダーを1つもインストールしておらず、3Dモデリング用のプログラムも1つも持っていなかったため、無料の、多くの場合、単純なGoogleプログラムをダウンロードすることにしました。 もちろん、最終モデルはSolidWorksで行う予定でした。
今後、主観的な意見を表明します。 この種の素早い服装であっても、SolidWorksを選択してください。 それに切り替えた後、私はそれがどんな場合でもより便利であることを実現しました。 少なくとも便利なバインディング、モデル階層などのために 言うまでもなく、2重の作業を行ったり、3Dプログラムからソリッドにモデルを描画したりする必要はありません。 Googleプログラムには3つの利点しかありません。無料、重量(30メートル)、およびユーザーが作成物をアップロードするモデルの巨大なリポジトリです。たとえば、すでにサーボがありました。
それで、私はグーグルのスケッチから始めて、ここにそのような魅力的なデザインを描きました:
熟考し、再描画し、再び熟考した後、彼女は最初にこれに変わりました:
そしてこれに:
すべての部品はアルミニウムからのフライス加工用に設計されているため、平らな形状にするか、曲げ加工で取得する必要がありました。 もちろん、それはまだ単なるスケッチであり、最も成功したバージョンではありませんでしたが、これを一時停止してサーボを選択することにしました。 主な基準は、ドライブのサイズと速度です。 主にe-bay標準サーボドライブとマイクロサービスが紹介されています。 標準的なサーボには、健全な範囲のパラメーターと価格がありますが、私が見た中で最も高価なのは300ドルのサーボユニットで、その瞬間は約60 kg * cmでした。
マイクロサーブの主なモーメントは1〜2 kg * cmで、速度は約0.1です。 設計を始めたとき、私はこのサーボを選択しました 。その速度は、同時に他のマイクロサービスの速度のほぼ2倍でした。 しかし、図面を要求した後、それはまったくマイクロではなく、マイクロと標準のクロスであることが判明し、最終的に私は最初の3サーバーロボットMG90Sを作ったのと同じサーボを選択しました過去の3倍安い。
また、2回注文しないように、同じ店舗のロボット用のバッテリーを選択しました。 3サーバーロボットが消費する電流を測定すると、正直驚いた。 私の推定によると、それは約300 mAを消費するはずでしたが、実際には、電流値は500 mAから700 mAに跳ね上がりました。 電流がかなり大きいことがわかったので、適切なサイズのリチウムポリマー電池を用意することにしました。 残念ながら、大容量のリチウムポリマー電池のほとんどが非常に長い(8-12 cm!)ため、ロボットの本体を予想よりも大きくする必要がありましたが、幸いなことに、そのうちの1つが見つかりました。
このバッテリーは長さが短いだけでなく、非常に狭いものでした(キャリパーの厚さは17 mmでした)。 6Vで5A、つまり30ワットの最大消費量を考えると、2つのバッテリーをロボットに搭載することにしました。これにより、11.1Vで合計2.4AH、つまり26.64 Whになりました。
したがって、最大消費であっても、ロボットは53分間生き続ける必要があります。
サーボは非常に安価だったため、設計を変更し、脚に3つのサーボを持つロボットを作成することにしました。 その後、Googleのスケッチで、ロボットの設計を見つけました。ここで何が起こったのでしょうか。

その詳細に囲まれたロボット。
その結果、私は20個のMG90Sサーボ、2個のバッテリー、およびそれらの充電器をe-bayで注文しました。 注文全体の費用はほぼ200ドルでした。 その後、ようやく固体と友人をインストールし、実際のデザインを開始しました。
設計
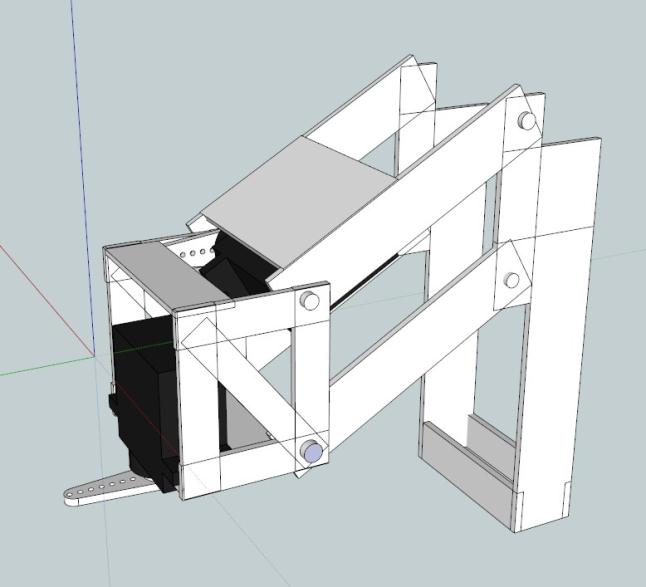
この段階で、私たちは責任を共有し、友人が彼の足のしっかりした部分を描き始め、私はサーボをマウントし始めました。 実際、これは構造の主要なコンポーネントの1つであり、これは脚の最初のジョイントであり、身体に取り付けられ、水平面および垂直面で脚の回転を実行します。 以下に示すスケッチから実際の設計に移行する必要がありました。
次の問題が発生しました。
- MG90Sは、ほとんどのサーボと同様に、片側にのみ軸があります。 不要な変形が発生する可能性があるため、これらを1つの軸で修正したくありません。
- サーボを取り付けるためのプラスチックの「耳」も上部のみにあるため、1つのブラケットではできませんでした。
これに基づいて、2つのサーボの最初のホルダー設計により、以下に示すかなり明白なソリューションが得られました。
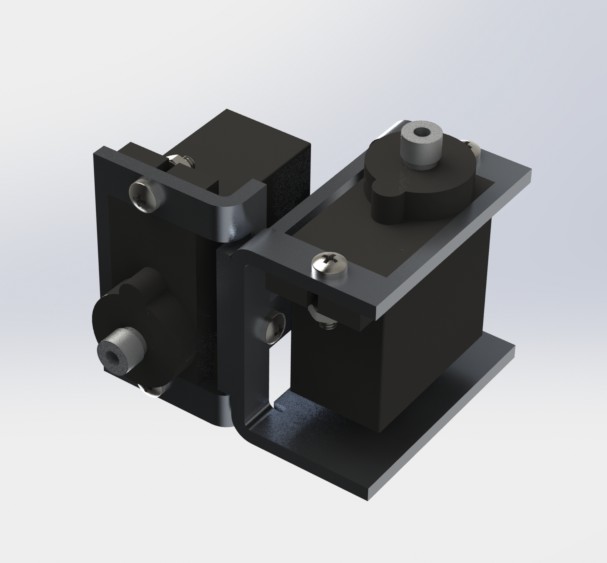
アセンブリは、2つのブラケットをねじ込み、サーボをねじ止めして構成されていました。
水平面内で回転するサーボドライブを固定するためのブラケットには、その軸の反対側に穴が開けられ、そこに軸の延長として機能するネジを挿入することになっています。
両方のブラケットは、フライス加工とその後の柔軟性により、シートアルミニウムから得られました。 Solidは非常に便利なユーティリティを提供し、数回クリックするだけで簡単にパーツのスキャンを取得できます。これを行うには、パーツを受け取りたいフォームに描画するだけです。
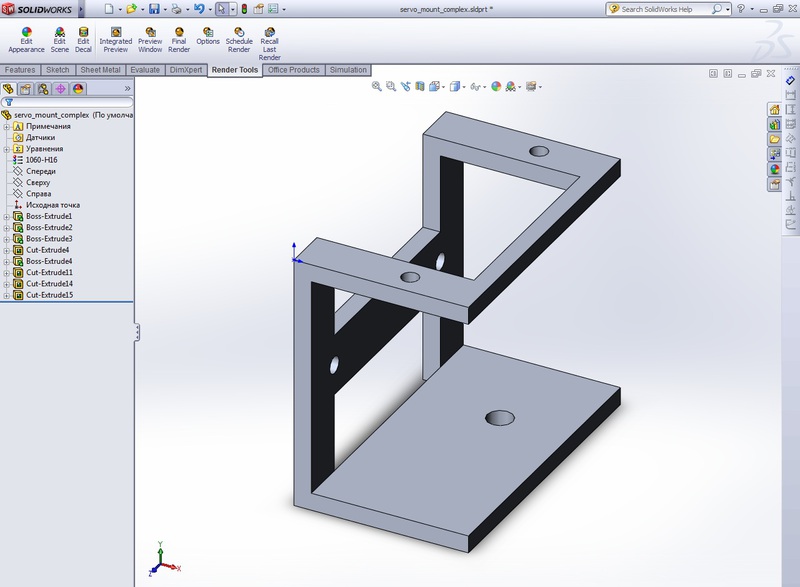
次に、メニューで[挿入]-[シートメタル]-[シートメタルに変換]を選択し、曲げる面、シートの厚さ、曲げ半径を指定します。
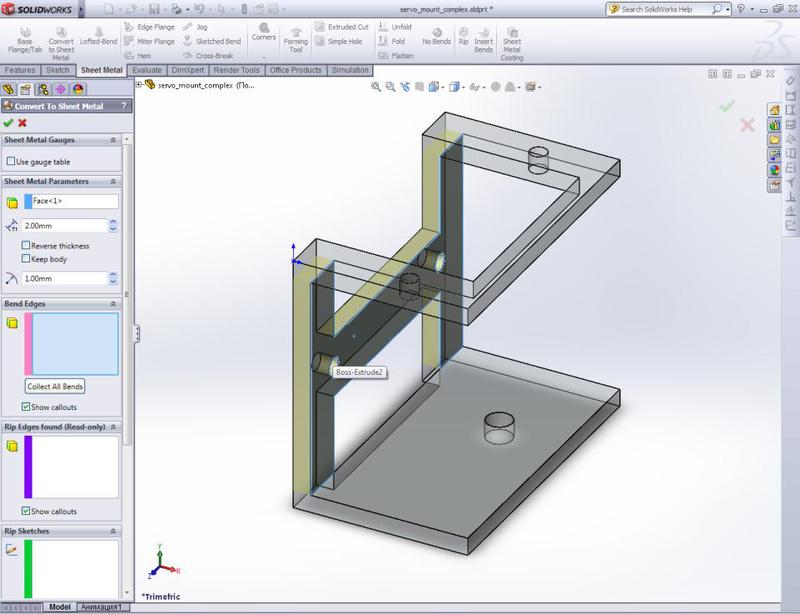
[OK]をクリックすると、最終部分が表示されます。違いは肉眼で確認できます。
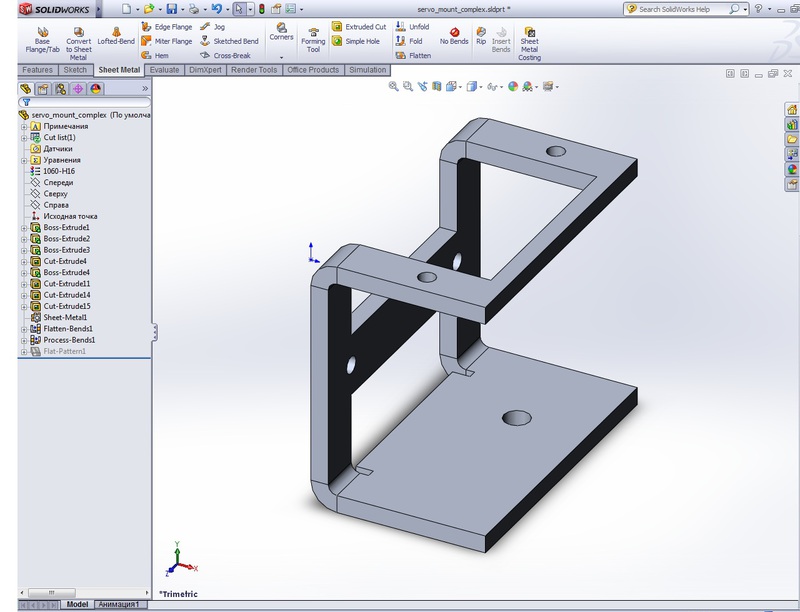
左側の操作ツリーには、実際の柔軟性に加えて、別の非アクティブなフラットパターンがあります。 有効にすると、フライス加工に必要な輪郭が得られます。
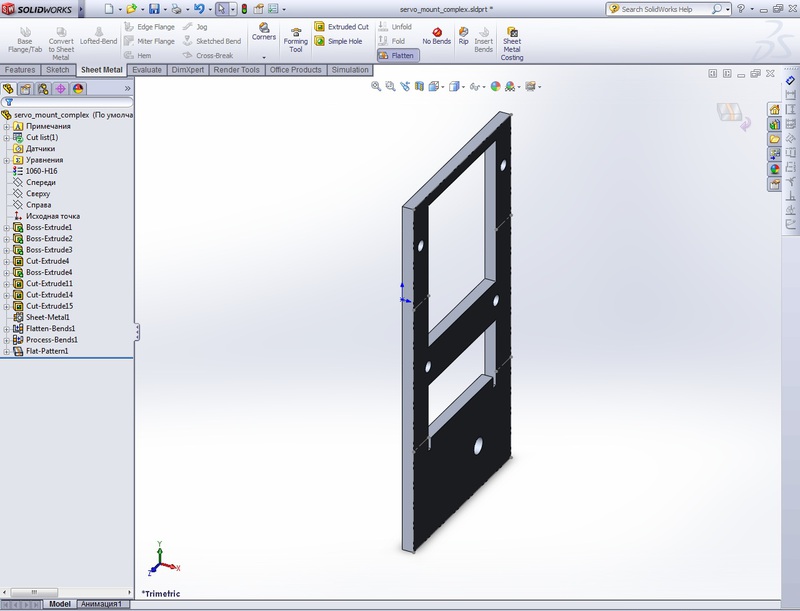
同時に、ソリッドは部品のカットについても気にし、必要に応じて追加します。
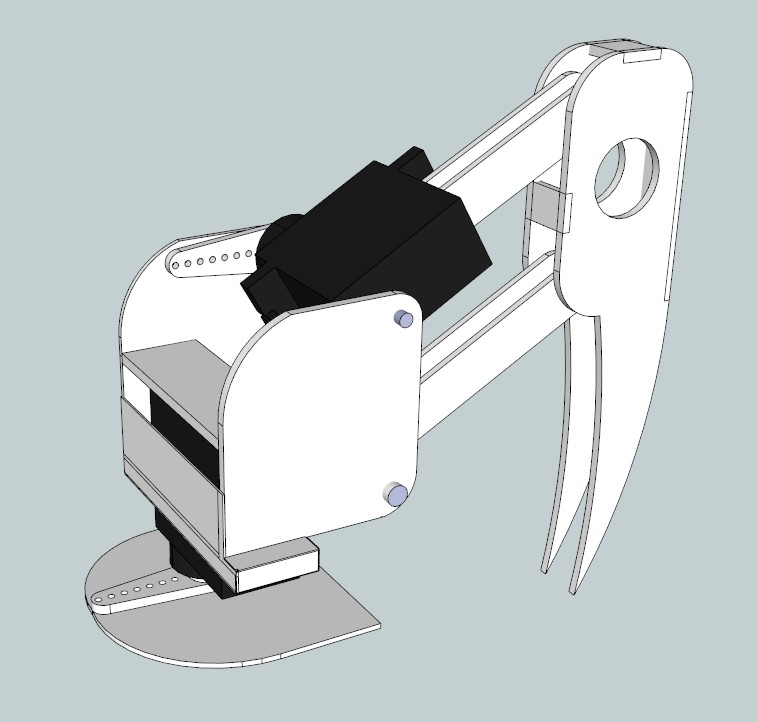
ドライブのブラケットの後、私は体の概観をスケッチし、友人が足の2つの部分を投げ捨てました。
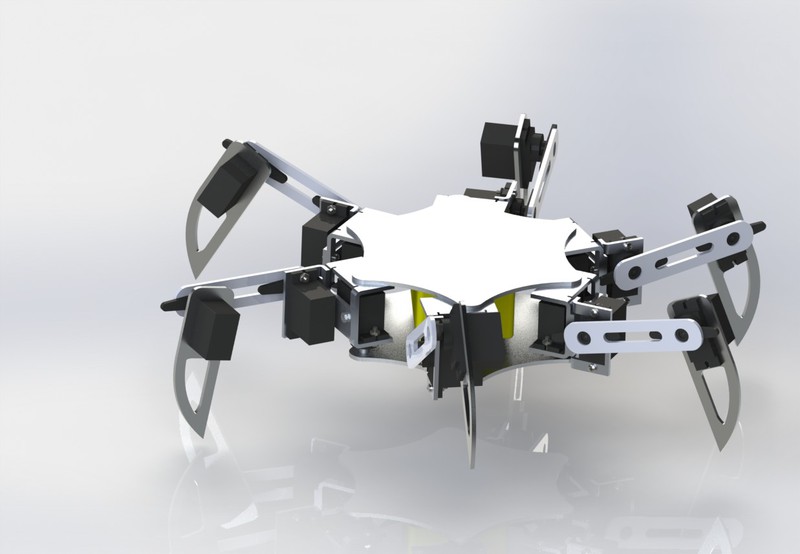
最終的なレンダリングは次のようになりました。
このモデルにより、ついにロボットの質量を測定できるようになりました。 結果は次のとおりです。
各13.5グラムの18個のサーボ= 243グラム、250 gに丸められます。
75グラムのバッテリー2個= 150 g
厚さ2 mmのシートアルミニウムで作られたデザイン(本体に切り込みなし)= 400 g。
したがって、ロボットの総重量は800グラムでした。 この値とサーボの制限モーメント(2.2 kg * cm)、およびヘキサポッド専用のYouTubeでのさまざまなビデオの長時間視聴に基づいて、脚の長さが選択されました(上記のモデルで使用された長さは一時的にのみ取得されました) 。
その結果、脚の垂直部分を「すね」110 mm、水平「太もも」を60 mmにすることが決定されました。これは、通常6脚で見られる1:2に近い比率を与え、モーメントは6 * 0.8 = 4.8 kg *です。ほら もちろん、1つのサーボではそのような重量を持ち上げることはできませんが、6本の脚があり、そのうちの3本が常に身体を支えているため、サーボあたりの最終モーメントは4.8 / 3 = 1.6 kg * cmと想定できます。 実際、2つのドライブがレッグリフトに関与しているため、実際のモーメントは約半分、つまり約600 g * cmです。 必要に応じて、サファイアの助けを借りて正確な値を計算し、モデルに負荷を追加することができましたが、ドライブがそれを大きく超えると約束したため、おおよその値で停止することにしました。
このモデルには1つの欠点があります。バッテリーをロボット内に配置すると、バッテリーがドライブの回転を妨げたため、屋根に移動することにしました。
さらに、サーボのホルダーの設計が心配でした-曲げを注文したくはありませんでした。そして、許容できる精度で厚いアルミニウムシートを曲げようとして、週末を悪徳で過ごすという素晴らしい見通しがありました。
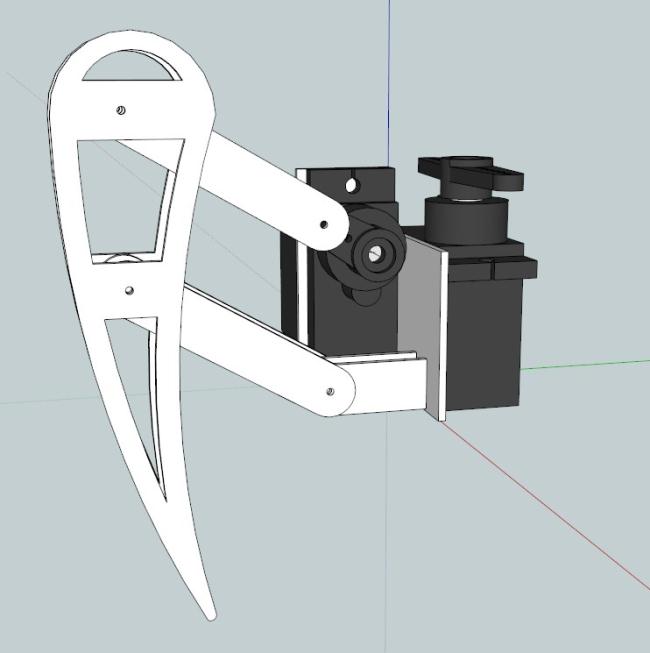
しばらく座った後、私は所有者をやり直しました、そしてこのデザインは実際のロボットで作られた最後のデザインでした:
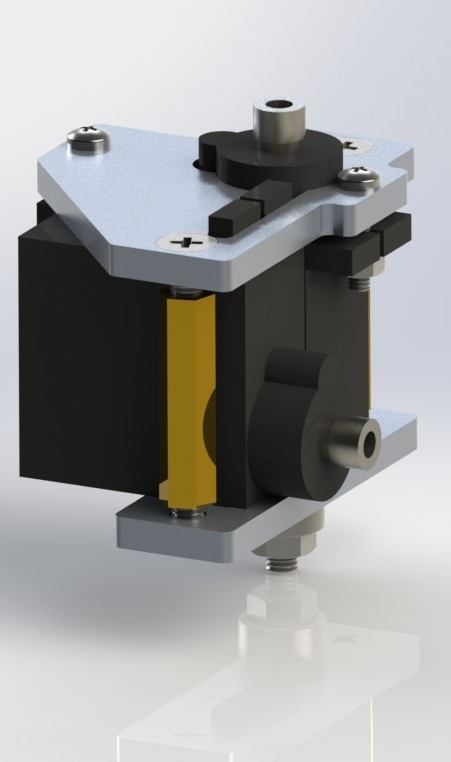
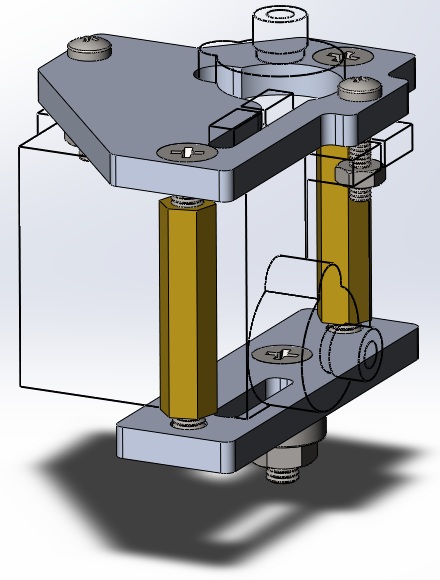
アセンブリは、サーボ突起用のスロットを備えた2つの完全に平らな部品で構成され、2つの標準ラックを使用してネジ止めされます。 軸として、以前と同様に、ネジがありますが、これは隠れた頭のネジに交換する必要がありました。 そうしないと、ドライブの1つがネジ頭に接触します。
脚も再描画されました。まず、パーツの長さが調整され、次に、子供のデザイナーのスペアパーツの印象を与えないように、形状がより装飾的なものに変更されました。

最後に、すべての作業の結果が新しいロボットモデルになりました。
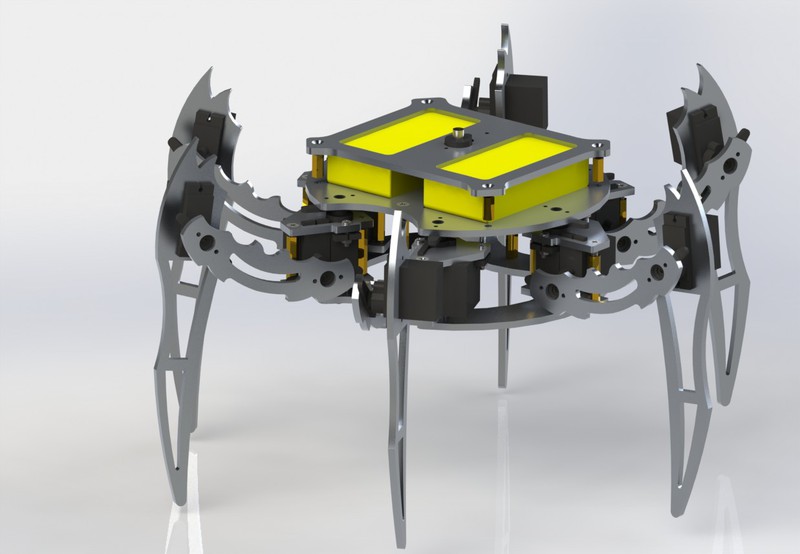
それからロボットはEctognathusという名前(昆虫の名前の1つである6脚の昆虫の1つであるectognathaから)を得ました。
モデルが完成した後、Solidworkファイルをフライス加工に関係するオフィスにドロップし、必要な詳細を取得するだけで十分でした。 そして、それらはすべて最終バージョンでは平らだったため、追加の操作は不要で、フライス加工後すぐに、以前にネジ、ベアリング、ラック、ナットで購入した構造をネジ留めすることができました。
この設計で終了し始めました...
生産
この記事はすでにかなり膨大なものであることが判明しているため、モデルから実際のデバイスへの移行の詳細、および関連する問題と妨害(その多くは!)が次の記事で説明されています 。
ご清聴ありがとうございました!