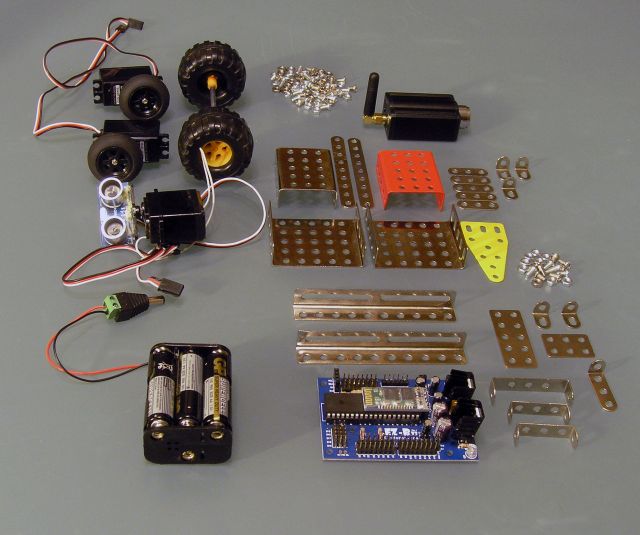
保険のために、2つの「完全なロボットキット」を注文しました。それぞれの価格は212ドルです。 各キットには以下が含まれます。
- EZ-B v3 Bluetoothロボットコントローラー
- ワイヤレスWebカメラ(そのための充電は、アメリカのコンセント用のプラグの形を取りますが、どのUSBからでも充電できます)
- 超音波距離センサー
- 回転角度が制限された3つのサーボ
- 2つの連続回転サーボ
- 2輪
- いくつかの余分なワイヤ
私は長い間待ちたくなかったので、空輸、つまりSmall Packet International-Airを60ドルで選びました。 Canadian Postのウェブサイトでは、配信速度は「6日以内」と示されていました。 実際、カナダの物流の利点はそれほど明白ではありませんでした。 注文後約2日で、小包が目的地に行ったことを示す手紙が届きました。 それから3週間はニュースが来ませんでした。 カナダのメールからの応答を取得しようとして何度か失敗した後、ez-robotsサポートを作成しました。 翌日、返事が来て、配達には3-4週間かかるかもしれないと報告されました。 実際、注文してから4週間後、将来のロボットの一部がようやくモスクワの郵便局に到着しました。
EZロボットはケースなしで、もっぱら電子コンポーネントのセットとして提供されるため、基礎を選択するという疑問がすぐに生じました。 いくつかの技術的なおもちゃの修正とデザイナーによるゼロからの組み立てという2つの可能性を考慮して、2つ目を選択し、「Children's World」で不足しているパーツを購入しました。
ところで、ほとんどの標準的なおもちゃ(車、タンク)はロボットの作成に適していないことが判明しました。回路基板とエンジン用のスペースが少なすぎるか、部品の固定方法が非常に不便です。 本当の発見は、「鋼と鉄の化合物」という残忍な名前を持つデザイナーであることが判明しました。 おそらく、誰かがレール、アングル、ネジを持った古いソビエトのデザイナーを覚えているでしょう-それが彼でした。 非常に低価格で、アイデアのテストに最適でした。 設計者のネジのサイズは、サーボにある留め具に対応しており、その部品のサイズはEZコンポーネントとよく一致していました。 しかし、彼にはまだ1つの欠点がありました-塗装されていない金属部品の接点でボードを横にすると、回路が短くなり、正しく動作しなくなります。 この問題は、例えば、ガスケットとしてポリエチレンを使用するか、部品を手作業で塗装することで解決されます。
以下は、最初のモデルの段階的な組み立てプロセスです。 シンプルな設計-回転距離センサーとカメラを備えた四輪車を使用しました。これを使用して、障害物をナビゲートおよび回避する必要があります。 最初のモデルに基づいて、追加のモジュールを追加するだけで、より複雑で興味深いデザインを作成できます。
1.分解状態
2.ホイールを取り付けるためのボディとフレームを組み立てます
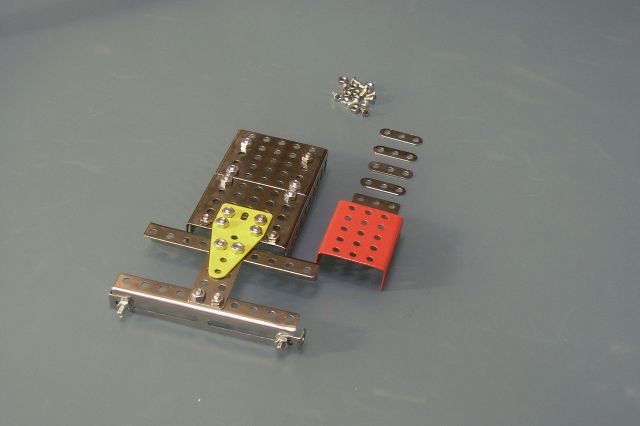
3.補助マウントを追加し、超音波センサーを立てます

4.ホイールとセカンダリマウントを取り付ける
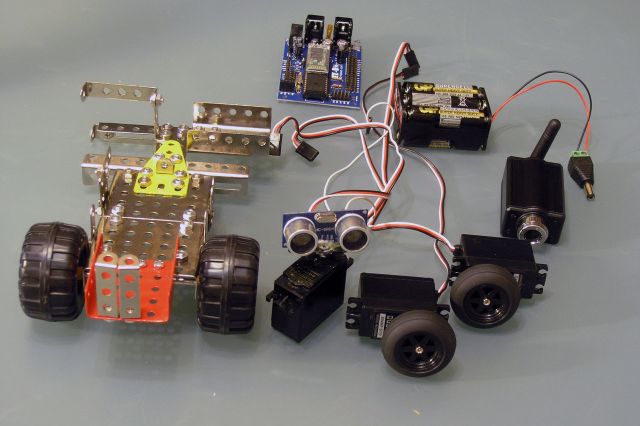
5.サーボモーターをフレームに取り付け、残りの電子部品で固定します

6.超音波とマイクロ回路を取り付けます
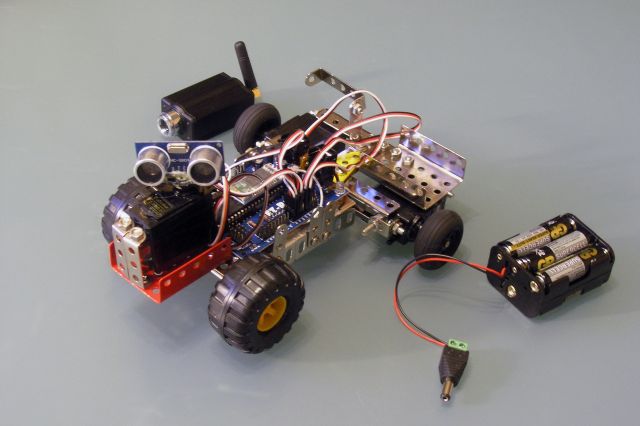
7.電源を接続し、ワイヤレスWebカメラを側面に取り付けます
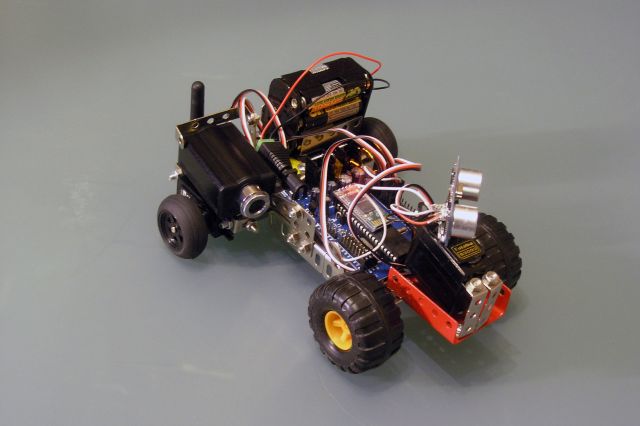
ここに、ここに、私の夢の瞬間があります。ロボットをつなぎ、ロボットに命を吹き込む時です。 電源を入れて、使用可能なデバイスの検索を開始してから、EZ-Builderをオンにします(ez-robots.comからダウンロードできます)。 また、接続エラーが発生します。ファームウェアの更新を忘れていたことがわかります。 この問題は、ez-builderに付属のユーティリティを使用して解決されます。
ビルダー自体は素晴らしく理解しやすいことが判明しました。サイトから3つのビデオを見た後、ロボットを自由に操作できました。 距離センサーを使用して制御するには、完成した要素を構成するだけです。 Ez-builderでは独自のスクリプトとアルゴリズムを作成できますが、それらは非常に限られていることを理解してください。 たとえば、条件では、任意の値を比較することはできません。このために特別に設計されたものはわずかです。 ただし、同じez-robot.comからEZ-SDKをダウンロードして、必要なものを実装できます。
結論:EZ-ROBOTSデザイナーは習得しやすいことがわかりました。 このソフトウェアは使用可能であり、最小限のプログラミング知識でも最初のロボットを作成できます。 ソビエトのデザイナーは、ワイヤーフレームを作成するための非常に便利なオプションです。 詳細が記載されたパッケージを受け取ってから写真に表示される結果までの時間は、それぞれ3時間の3晩です。
今後の計画:
1. EZからFriduinoへの転送:海外からの部品の配送速度は明確に満足されていません。
2.キットの電源から同様のバッテリーに移動します。
3.サーボに最適なアプリケーションを見つけます。 歩行メカニズムを試してください。
4.ウェブカメラから画像をナビゲートするようにロボットに教えます。
5.ロボットにルートを記憶させ、地形をマップするように教えます。
最後に、動作中のロボットに関する短いビデオ。
http://youtu.be/o95fQRay-dw
http://youtu.be/6mlr2F49kPw