以前の秘密のGoogleプロジェクトは文字通り一般に公開されています。 同社はネバダ州の公道でのテスト旅行のライセンスを取得し 、その前に、誰もが囲まれた地域でのテスト旅行に招待されました 。
現時点では、検索の巨人に所属するトヨタプリウス艦隊は、人間が部分的に介入するだけで、混雑した道路や山道で、30万キロメートル以上の都市環境を巻き返しました。 このプロジェクトはまだ市場への参入にはほど遠いですが、無人のゴルフカードがGoogleのGoogle独自のキャンパスにインストールされており、新しいテクノロジーが近い将来世界を変える方法を明確に示しています。
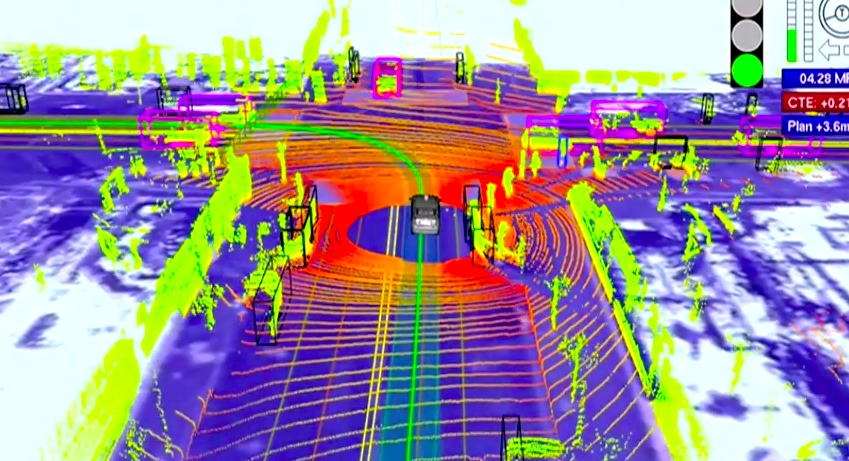
昨年9月、スタンフォード大学のコンピューターサイエンス教授であるセバスチャントラン (開発をリード)とGoogleエンジニアのクリスウルムソン(Chris Urmson)がサンフランシスコの電気電子技術者協会のインテリジェントロボットとシステムの国際会議でプロジェクトの主なアイデアについて話しました。 車がどのように機能するかを説明し、車載コンピューターが他の車両、歩行者、信号機を「見る」方法の小さな断片を含む、いくつかのビデオと道路試験を示しました。
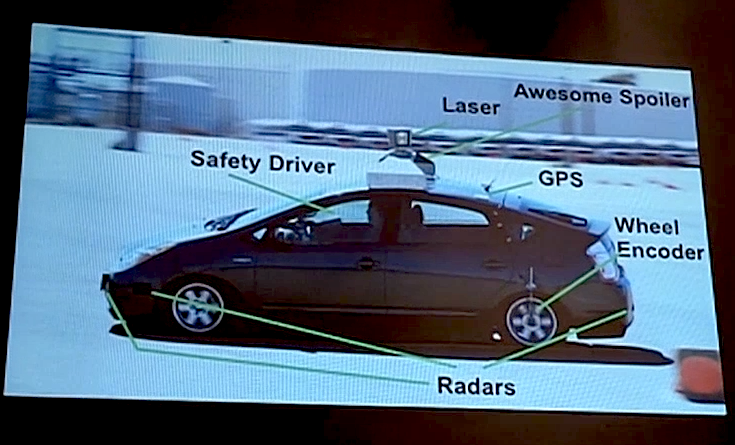
技術プロジェクトマネージャーのウルムソンによると、このシステムの中核は、車の屋根に取り付けられたVelodine製の 64ビームレーザー距離計です 。 デバイスは、周囲の空間の詳細な体積地図を生成するのに役立ちます。 その後、レーザー測定と世界の高精度マップを組み合わせて、障害物や法的な問題を回避しながら運転できるさまざまなタイプのデータモデルを生成します。 また、フロントバンパーとリアバンパーの4つのレーダー、バックミラーの横にあるカメラなど、他のセンサーも搭載されています。 GMPシステムのセンサー、慣性測定ユニット、ホイールセンサーは、車両の位置を特定し、動きを追跡します。
いくつかの詳細に注意してください。 まず、Googleの開発は、慎重に設計された地球の表面の地図に大きく依存しています。これは、Urmsonによれば、機械の位置を正確に決定するための必須条件です。 グローバルナビゲーションシステムを使用すると、数メートルの誤差が生じる可能性があります。
第二に、無人のレースに車を送る前に、Googleのエンジニアは自分で1回以上ルートを移動し、周辺地域に関する情報を収集します。 オフラインで運転するとき、車はデータを以前の条件と比較します。これにより、メールボックスやポールなどの固定物から歩行者を分離できます。 前のビデオでは、結果が顕著でした。 ある時点で、車は交差点で停止し、青信号の後、歩行者に道を譲ってから左折して進みました。

ドローンはより攻撃的になることがあります。 たとえば、交差点を運転している間、彼は道路の規則に従って他の車を追い越しますが、他の車が往復しない場合、彼は意図を示すために軽く急いで行きます。 現実世界でこの動作をプログラミングしないと、ロボットは乗ることができません。
明らかに、Googleのエンジニアはプロジェクトに取り組んでいます。運転席に座って、会社の駐車場を無人偵察機が運転し、毎回タイヤをきしむのを見て、13分で満足の顔を見てください。 しかし、このプロジェクトには真剣な意図があります:TranとGoogleの創業者を含む彼の同僚の多くは、スマートカーがより安全で効率的な運転を実現すると信じています:車は互いに近くに運転し、無料の量を増やします道路上の場所。 このプログラムは人よりも速く反応するため、事故を避け、何千人もの命を救うことができます。
ウルムソンはまた、車両が共通のリソース、つまり必要に応じて人々が利用できるサービスになるシナリオを提案しました。 車の外観については、スマートフォンで適切なオプションを選択するだけで十分であり、旅行中は運転席でリラックスできます-車を運転する必要はありません。 会議では、キャディベータのコンセプトビデオが公開され、ゴルフカードが一般的な車として使用されました。 充填は、トヨタプリウスのサンプルよりも簡単です。車両のセンサーは、環境に配置されたセンサーと相互作用して、位置を決定し、他の人の動きを「学習」します。
TranとUrmsonは、未解決の問題がまだまだたくさんあることを認めています。信頼性の向上、法的責任の問題ですが、それだけでは解決できません。 Tranが言ったように、他の人が不採算だと考える輸送の問題は彼らにとって有望なようです。